G05B — Регулирующие и управляющие системы общего назначения; функциональные элементы таких систем; устройства для контроля или испытания таких систем или элементов
Автоматическая система регулирования производительности газовых скважин

Номер патента: 746086
Опубликовано: 05.07.1980
МПК: E21B 41/00, G05B 11/00
Метки: автоматическая, газовых, производительности, скважин
...аяд щ посвующих скважин. Эти значения п отоянное усилие на мембранном блоке 16,изводительности и будут поддерживатжин. - ти значения про- КамераА соединена с выхо од м регу-,автоматические регуляторы расхода.ь лятора 5 расхода, а сопло 17 - с исТполнительным механизмом 6.аким образом, описанная система обес" Апечиает автоматическое регулиров - 55втоматическая системаа- следующим образом.работаетние производительности газовых сква- Пиномжин, не допуская их при нормальном значении давленияс ая их перегрузки. питания (Р = 1 40 14Р. 1Однако этой системе так жеиит =- , кгс/см ) кои вышеописанной, присущ второй неРже как мандный сигнал по авад емый в камерудостаток: при исчезновении пневмопи- О б анноВ реле давления 11, развивает не на...
Корректирующее устройство

Номер патента: 746398
Опубликовано: 05.07.1980
Авторы: Баркан, Гольдин, Гольдшмид, Каплан
МПК: G05B 5/01
Метки: корректирующее
...Усилитель 4 при этом обеспечивает заданное максимальное значение скорости поступательного перемещения датчиков 1 и 2 и жестко связанногос ними режущего инструмента, а усилитель 6 постоянную добротность следящей копировальной системыПри копировании участка с резким изменением угла копирования растет скорость изменения ошибки копирова"ййя, так как следящая система иэ-за инерционности не успевает реагировать на резкие изменения профиЛя, При этом напряжение на выходе блока 7 возрастает. Это вызывает уменьшение коэффициента передачи усилителя 4, снижение скорости поступательного йеремещения датчиков 1 и 2 и режущего инструмента.Для поддержания постоянной доброт ности одновременно со снижением коэффициента усиления усилителя 4...
Устройство для компенсации люфта в двухдвигательном приводе

Номер патента: 746399
Опубликовано: 05.07.1980
Автор: Яворский
МПК: G05B 5/00
Метки: двухдвигательном, компенсации, люфта, приводе
...передачей. Коренная шестерня 14 передает вращающие моменты нагрузке,например, металлоконструкции, изображенной на чертеже массами 15 и 16,соединенными друг. с другом упругимэлементом 17, угол закручивания которого измеряется при помощи измерителя угла закручивания 18 (например, 4 Ооптико-электронная аппаратура).Устройство работает следующим обраэом.При отсутствии выходного сигналасогласующего усилителя 3, что соответствует согласованному положениюследящего привода, блок предварительного смещения 1 формирует равные повеличине и противоположные по знакунапряжения на соответствующих входах 5 Осумматоров 4 и 5, в цепях каждого иэдвух двигателей, которые развиваютравные, но противоположные моменты,компенсирующиеся на коренном зацеплении....
Фильтр для систем автоматического регулирования

Номер патента: 746400
Опубликовано: 05.07.1980
Авторы: Алексеев, Цыбин, Шурилов
МПК: G05B 5/01
...автоматического регулирования, содержащий последовательно соединенные источникпеременного сигнала, суммирующийусилитель-ограничитель, первый и:второй интеграторы и сумматор, второй вход которого соединей с выходом первого интегратора, а выход -со вторым входом суммирующего усилителя-ограничителя, о ь л и ч а ющ и й с я тем, что, с целью повы 40 шения точности фильтра при высокомуровне помех и предотвращения явления скачкообразного резонанса, онсодержит последовательно соединенные. нелинейный элемент и третий4 интегратор; выход которого соединенс третьим входом сумматора, выходкоторого соединен со входом нелинейного. элемента.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРЮ 402855, кл. 6 05 В...
Способ компенсации инерционности систем автоматического управления и регулирования
Номер патента: 746401
Опубликовано: 05.07.1980
Авторы: Богданова, Окунь, Рубахин
МПК: G05B 11/00
Метки: инерционности, компенсации, систем
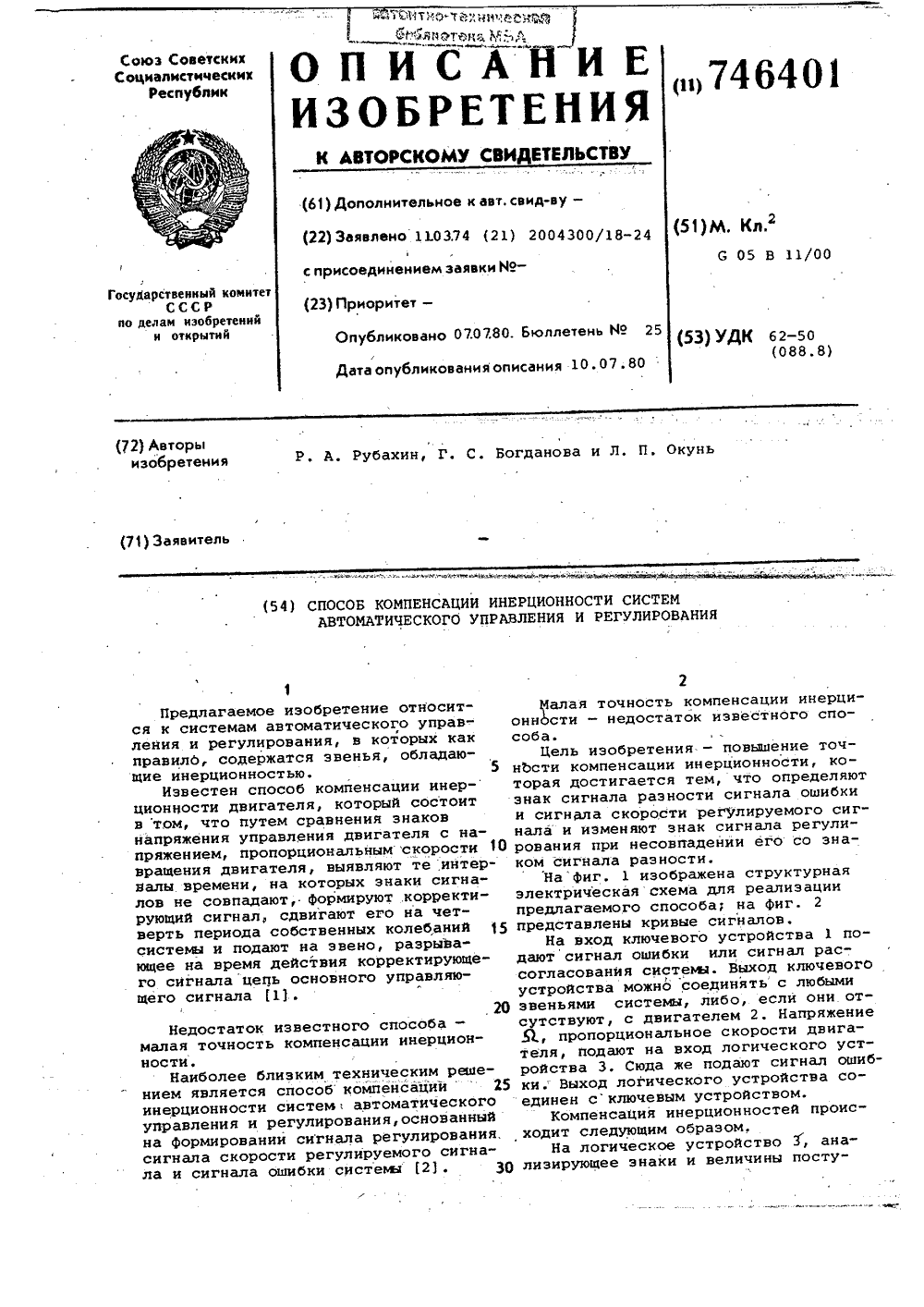
...ЗТсигнал ошибки системтТЙ - напряжение, пропорциональноескорости двигателя;К - коэффициент пропорциональности;п - коэффициент, принимающий численные значения и 11.В те моменты времени, когда выполняется условие (1), с помощью ключевого элемента 3 пропускают основнойсигнал управления без изменения. Вте интервалы времени, когда выполняется условие (2), с помощью ключевогоэлемента изменяют знак основного сиг" =нала. Одйовременно (в зависимости отвеличины и) можно изменять амплитудуперекидываемого сигнала (как правилоп 1)Иэнестйо, что прй изменении знакауправляющего сигнала, по сраннению сотключением этого сигнала, достигаютболее эффективной стабилизации системы в переходных режимах. Еще больший;изменения знака управляющего сигналас...
Система управления манипулятором
Номер патента: 746402
Опубликовано: 05.07.1980
Авторы: Белов, Королев, Сергеев
МПК: G05B 11/00
Метки: манипулятором
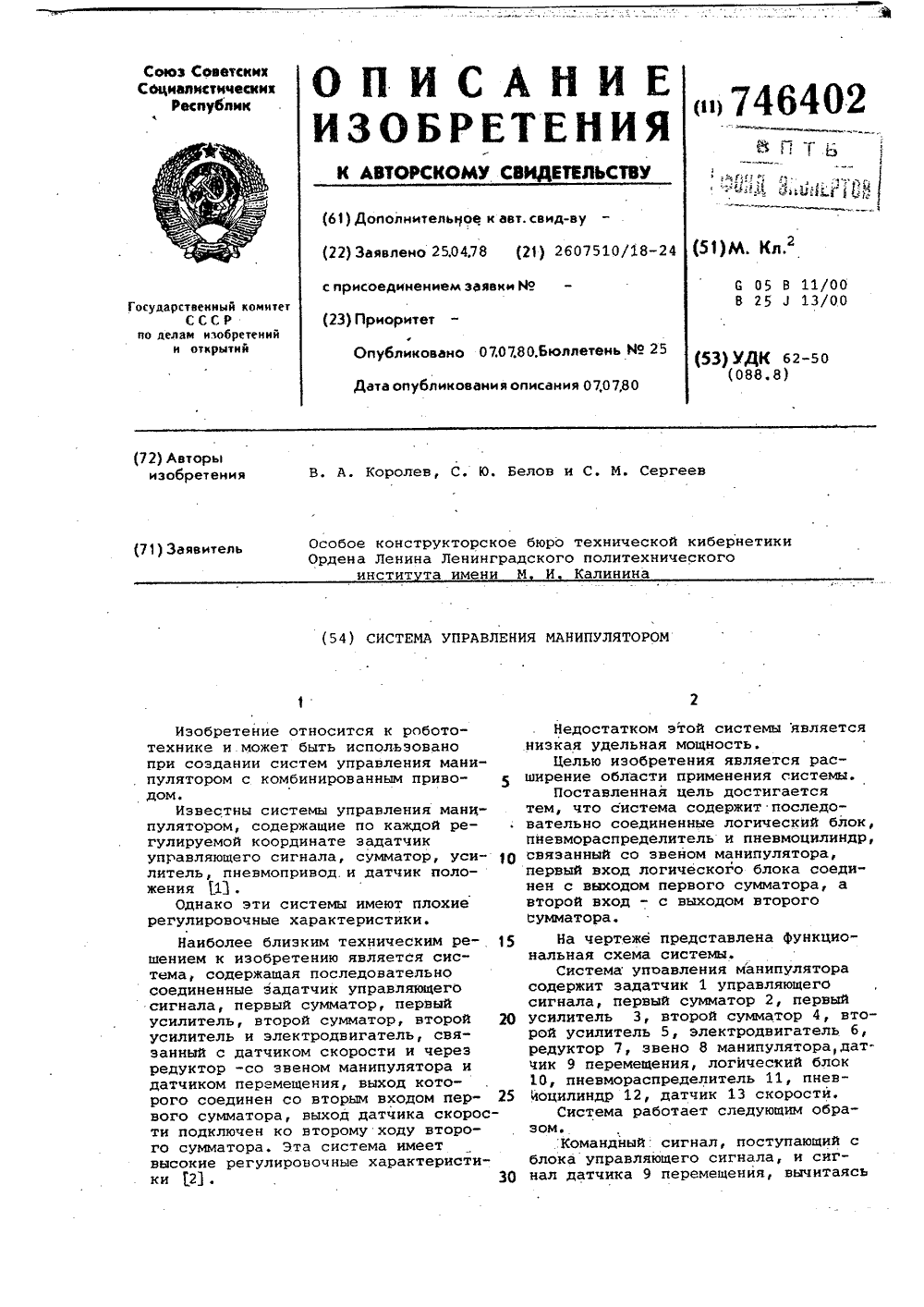
...электродвигателем б (звеном 8 манипулятора) скорости, соответствующей сигналу, поступающемуот первого усилителя 3 сигнала рассогласования по положению, сигнал рассогласования скорости меняет свой знак, логический блок 10 вырабатывает сигнал торможения, Логика управления пневмораспределителем,11 в режиме торможения опреде- ляется требуемыми динамическими качествами системы привода и может быть, например такой, когда пневмо, распределитель 11 в режиме торможения соединяет с магистралью обе "по- лости пневмоцилиндра 12, который начинает тормозиться. Одновременно начинает тормозиться электродвигатель б, вследствие изменения знака выход- ного сигнала втбролго усилителя 5. Торможение, продолжается до тех пор, дока сигнал рассогласования по...
Привод подвижного зеркала интерферометра

Номер патента: 746403
Опубликовано: 05.07.1980
МПК: G05B 11/00
Метки: зеркала, интерферометра, подвижного, привод
...15 грубое перемещение подвижного зеркала 4. Блок б, ключ 7,блок 8 и усилители 9, 10 и 16 входятодновременно в точный и в грубый ка налы.СущкируЮщий усилитель 10 вместе сусилителем 16 цепи обратной связиобразует цель обратной связи силовойкатушки 11 и катушки 17 обратной свя зи, Магнитоэлектрическая головка содержит полый цилиндр 18, подвешенный в корпусе 19 на упругой подвеске (например, диафрагмах 20), который допускает перемещение цилиндра18 только в продольном направленииНа периферийных участках цилиндра18 расположены две катушки - силовая11 и обратной связи 17, входящие вкольцевые зазорыпостоянных магнитов 21.Работа привода осуществляется следующим образом.По сигналу блока 8 управления корректирующий усилитель 9...
Устройство для регулирования технологических параметров
Номер патента: 746404
Опубликовано: 05.07.1980
Автор: Синебоков
МПК: G05B 11/01
Метки: параметров, технологических
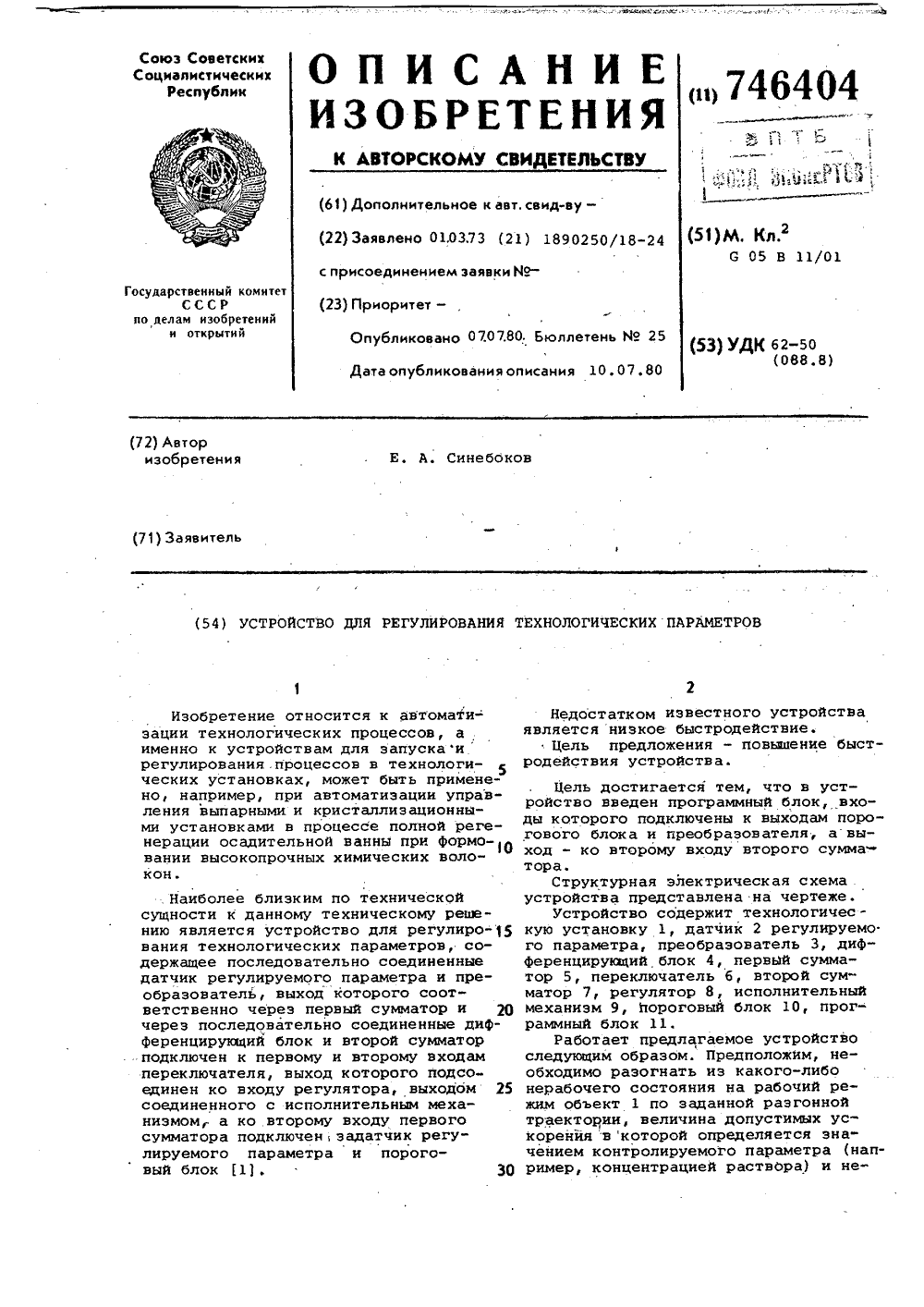
...установку 1, датчик 2 регулируемо. го параметра, преобразователь 3, дифференцирукщий блок 4, первый сумматор 5, переключатель б, второй сум" матор 7, регулятор 8, исполнительный механизм 9, )тороговый блок 10, программный блок 11.Работает предлагаемое устройство следующим образом. Предположим, необходимо разогнать из какого-либо нерабочего состояния на рабочий режим объект 1 по заданной раэгонной траектории, величина допустимых ускоренйя в которой определяется значением контролируемого параметра (например, концентрацией раствора) и не746404 Формула изобретения Устройство для регулирования технологических параметров, содержащеепоследовательно соединенные датчикрегулируемого параметра и преобразо-.ватель, выход которого соответственно...
Следящая система

Номер патента: 746405
Опубликовано: 05.07.1980
МПК: G05B 11/01
Метки: следящая
...тахогенератор 12вырабатывает импульсный сигнал, который практически не влияет на работусистемы, Качество переходных процессов в системе определяется тем, чтоблагодаря дифференциатору 13 релейный блок переключается раньше, чем "сигнал рассогласования уменьшится до нуля, и система,подтормаживаясь)за счет противовыключения двигателя,приходит кустановившемуся состоя ник с меньшими запасами кинематической энергии. Это уменьшает перерегулирование и время переходного процесса.В"режиймейвынужденных движений, например; при линейной заводке, тахогенератор 12 вырабатывает сигнал Пкоторый поступает на входы сумматоров 6 и 7. Смысл предложения состоитв том, чтобы передать без ослабленияэтот"сигнал на выход блока умножения .9, -т. е. для...
Следящая система

Номер патента: 746406
Опубликовано: 05.07.1980
Авторы: Даниленко, Дворниченко, Мотузкова, Палиенко, Скавронский, Туровский
МПК: G05B 11/01
Метки: следящая
...начала сравнения напряжений Ои О ;- момент срабатывания системы при ограничении углаповорота выходного вала- момент изменения фазы напряжения рассогласования 01, с 4 - момент срабатывания системы при смене Фазы напряжения О.40Система работает следующим образом.При угле поворота меньшем предельного, напряжение Об на выходедатчика 6 угла не превьиаает порогового значения Оп и на выходах пброгового устройства 8 и блока 9 совпаденйя напряжение равно нулю, а свыхода согласующего устройства 10 науправляющие входы ключей 11, 12 0поступает положительное напряжениеО, которое удерживает ключ 11 в замкнутом, а ключ,12 в разомкнутом сос. тоянии,При достижении выходным валомпредельного значения угла поворота(момент с ) амплитудное значение...
Широтно-импульсный регулятор

Номер патента: 746407
Опубликовано: 05.07.1980
Авторы: Етмар, Иванов, Куцко, Шукалов
МПК: G05B 11/01
Метки: регулятор, широтно-импульсный
...воздействие посту- ЗО пает на вход сумматора 1 и на вход делителя 8 управляющего воздействия. Непрерывный сигнал с выхода сумматора 1 усиливается усллителем 2 напряжения и поступает на вход генератора 3 импульсов управляемой длительности, преобразующего его в последовательность прямоугольных импульсов напряжения, поступающих на входы Формирователя 5 амплитуды импульсов и усилителя 4 мощности. В 4 О Формирователе 5 амплитуды импульсов, при помощи опорного напряжения Ц нормируются по амплитуде импульсы, поступакпщие на его вход, На входе усилителя 4 мощности посту пает сигнал с генератора 3 импульсов управляемой длительности и передается на вход нагрузки 10, выход которого через блок 9 обратной связи соединен с одним из...
Следящая система

Номер патента: 746408
Опубликовано: 05.07.1980
МПК: G05B 11/10
Метки: следящая
...имодулятором 11 и переводит н соответствующее положение реле 14, которое предназначено для реверса двигателя 12.Двигатель 12 начинает вращаться в необходимом направлении и обрабатывать возникший сигнал рассогласования. При этом выходной сигнал тахогенератора 6 равен нулю, выходной сигнал реле 15 тоже равен нулю 1 а следонательно, выходной сигнал блока умножения 9 равен нулю. Таким образом, в течение всего переходного процесса, обусловленного скачком сигнала задания; тахогенератор отключен от контура управления системы.В режиме автоколебательной обработки, например при линейно нарастающем задающем сигнале в системе, сигнал тахогенератора 6 складывается с сигналом выпрямителя 5, если знаки сигналов на выходах реле 14 и 15 сов падают, и...
Устройство для управления исполнительным механизмом

Номер патента: 746409
Опубликовано: 05.07.1980
Автор: Живило
МПК: G05B 11/14, G05B 19/02
Метки: исполнительным, механизмом
...напряжения на резисторе 28. Кроме того,"-отрицательной полуволной через диоды 30, 31, 26 и датчик 24 заряжается конденсатор 32. Уровень зарядаэтбтФ кбндейсатора"ойределяется Соотношением сопротивлений резисторов 6024 и 27 и равен йадейию напряженияна резисторе 27. В связи с тем,что уровейь эаряда конденсатора 33ниже уровня заряда конденсатора 32,на баэ т анзисто а 52 подается от эицательная, а на базу транзистора 36 йоложительная полярность нхолного сигнала, При этом состояние транэисторон 52, 35 не меняется, а транзистор 36 закрывается. Поэтому транзистор 37 открывается и через резистор 45 открывается симметричный тирис- тор 51. При этом выходной нал исполнительного механизма (на чертеже не показан) поворачиваетсядвигателем 25 в...
Устройство для регулирования режима торможения транспортного средства

Номер патента: 746410
Опубликовано: 05.07.1980
Авторы: Котелевский, Шниткин
МПК: G05B 11/14
Метки: режима, средства, торможения, транспортного
...1 выдает при вращении колеса почти синусоидальные сигналы О 1 О 8 с обмоток 17, 18, частоты которых пропорциональны угловой скорости колеса (см. Фиг. 2), Сигнал с обмотки 17 подается на преобразователь, составленный из триггеров 5, 6, ключа 7, инвертора 11, на вход триггера 5 через конденсатор 3 и на входы триггера б через конденсатор 2, диод 9 и ключ 7, так как в исходном положении контакт 51 замкнут, Триггер 5 переключается в положение положительного сигнала О на выходе при превышении сигналом О, на входе определенной положительной величины и выключается при понижении О 7 ниже той же величины (см. Фиг. 2 а). Триггер б переключается в положение положительного сигнала на выходетем, же сигналом, что и триггер 5,а отключается при...
Система автоматического регулирования давления
Номер патента: 746411
Опубликовано: 05.07.1980
Авторы: Духанов, Карпов, Мироненко, Смирнов
МПК: G05B 11/32
Метки: давления
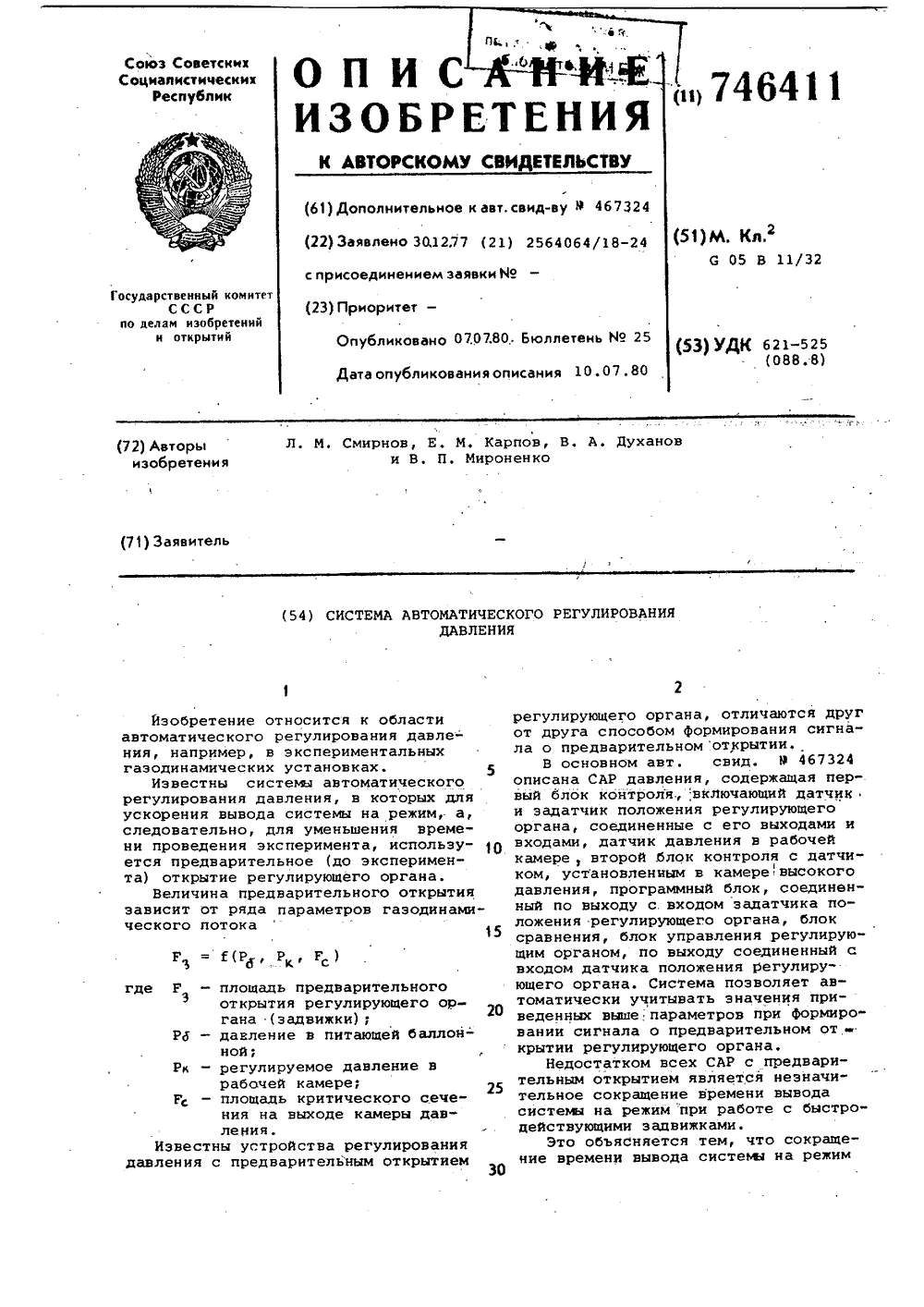
...Выход блока контроля 2 соединен со входом программного блока 9, который механически соединен с задатчиком 10 положения регулирующего органа 11, Датчик положения 12 регулирующего ор гана соединен с исполнительным двигателем САР давления 16, Выход от эадатчика 10 и датчика 12,входяцих в блок контроля, соединены со входами блока вычисления момента реверса 13 соответстненно. Блок управления реверсом 14 по входу соединен с блоком 13, а по выходу с входом блока сравнения 15, соединеннымс исполнительным двигателем САР 16, Второй вход блока сравнения 15 соединен с выходом измерительного моста САР, образованного датчиком давления 17 в рабочей камере 3 "и задатчиком величины давления 18.Задатчики 5 и 8 конструктивно рас-, положены на одной оси....
Пневматический пропорциональный регулятор

Номер патента: 746412
Опубликовано: 05.07.1980
Авторы: Абдуллаев, Джафаров, Файязов
МПК: G05B 11/58
Метки: пневматический, пропорциональный, регулятор
...регулировании"А" кроме кнопки "А", следует включить регулятор, нажав кнопку "вклф,Включающее реле регулятора отключа- Я ет канал опорного давления и соединя-.ет выход регулятора с исполнительным механизмом и его шкалой.Так как в данный момент Р = Р,то в исполнительный механизм постущ пает Р т. е. давление, которое соответствует давлению установленномузадатчиком вторичного прибора (наивыгоднейшему положению исполнительного механизма).Это положение также соответствуетрабочей точке (стационарному режиму) статической характеристике управляемого объекта.Таким образом, давление Р (в отличие от линейного регулятора ПР 2.5) 40 устанавливается автоматически с помощью задатчика вторичного прибора,что улучшает эксплуатационные свойства...
Идентификатор нестационарных объектов

Номер патента: 746413
Опубликовано: 05.07.1980
Авторы: Иванов, Ивахненко, Михалев
МПК: G05B 13/00
Метки: идентификатор, нестационарных, объектов
...составляющая является оценкой градиента функции качества по параметру или состоянию. Последнее обстоятельство используется для организации движения к экстремуму функции качества,Контур оценки параметров работает следующим образом, При возникно вении сигнала рассогласования на вход первого генератора 5 поступает сигнал оценки с квадратора 4. Этот сигнал содержит текущую информацию о величине несоответствия варьируе мых коэффициентов настраиваемых моделей 1, 2 и параметров объекта идентификации 9. На базе этой информации, закодированной в изменении частоты формируеьых генератором сигналов, организуются встречные движения попарно варьируемых коэффициентов настраиваемых моделей объектаидентификации. Процедура распознавания параметров...
Адаптивный регулятор

Номер патента: 746414
Опубликовано: 05.07.1980
Авторы: Алиев, Джафаров, Шубладзе
МПК: G05B 13/00
Метки: адаптивный, регулятор
...вход сумматора 4, на второй вход которого поступает выходной сигнал интегратора 9. В сумматоре 4 формируется выходной сигнал регулятора П(г.).В контуре адаптации на основе сиг налов Я и Е, формируется автоматически изменяемая часть коэффициента усиления регулятора по алгоритму,И) = щ,йю где щ - настраиваемай масштабный коэффициент; У(Е,Е) - переменная функция, причемпри Е ЕО (3)Ябпри Я . )Окоторая. реализуется с помощью блока изменения структуры 10 и ключа 9-ячейки 11;максимальное значение модуля реальной производной, формируемое на основе выходного сигнала(Е блока определения модуля 12 в фильтре 13 по алгоритму) 1 Ягде Ти Т - постоянные временифильтра.Входной и выходной сигналы дифференциатора 5 поступают на соответствующие входы...
Самонастраивающаяся система управления
Номер патента: 746415
Опубликовано: 05.07.1980
Авторы: Копысов, Прокопов, Пупков
МПК: G05B 13/00
Метки: самонастраивающаяся
...уравнениюК(1) =СЙЮ+ Е(Ц, К(0) - О, (5)где Р (1) - (ив) - матрица,управляющее воздействие с) формируется ввидеи(О=- к х(0,(О О к О . О к О О 3векторы, размеров (1 си) У которыходноименные компоненты не равны нулю одновременно.Иэ нулевых компонент )с; )слфгвектора 1 образует вектор Й,"=с)с;Д, который вычисляетсяпо формулек Ф с с Р Шбт, (8)где Й = (Й; Й, ,с; - (с,т фс, ) - известные векторы размерности (1 п.) .Матрица Н размеров (щ и) вычисляется по формулеттй =т (К К) Й если де 1 Я Р) Ф О,тО, если деУЯ Р) = О.Отличные от нуля компоненты вектора ) вычисляются по формуле= ф а(= 1,", и-пч). (10)В формуле (10) о, - известные коэффициенты матрицы А объекта управления, Й - заданные константы,3 рСамонастраивающаяся система управления...
Регулятор

Номер патента: 746416
Опубликовано: 05.07.1980
Авторы: Королев, Котов, Слекеничс
МПК: G05B 13/00
Метки: регулятор
...слежение зонынечувствительности за амплитудойшума одновременно с повышением надежности улучшает точность регулирования.На фиг, 1 и 2 представлена блоксхема автоматического регулятора.Регулятор содержит элемент 1 сравнения, элемент 2 зоны нечувствительности, блок 3 выделения шума, усилитель 4 мощности, двигатель с исполнительным механизмом 5, объект 6 регулирования и обратную связь 7,На фиг. 2 представлен один из возможных вариантов технической реализации блока 3 выделения шума и элемента 2 с управляемой зоной нечувствит ел ьности .Регулятор работает следующим образом.Поступающий на элемент сравнения(фиг. 1) входной сигнал Х сравнивается с сигналом обратной связи У ив "виде их разности формируется...
Многоканальный автоматический оптимизатор

Номер патента: 746417
Опубликовано: 05.07.1980
Автор: Дроздов
МПК: G05B 13/02
Метки: автоматический, многоканальный, оптимизатор
...дифференциатора1 появляется сигнал в через времяоДФНа вход управляемого генератора9; , состоящего из интегратора с пороговым элементом, подается сигнал 0 в;+ + "огде Оо - постоянная величина,При достижении сигналом 3; иа выходе интегратора величины порога срабатывается )О пороговогб элемента,генератор 9; срабатывает и изменяетсостояния триггера 10 и одноВибра"тора 8; . Одновибратор изменяет состояние переключателя 4(, т.е, подключает на вход генератора 91 входнойсигнал через инвертор 3; . После из.менения состояния триггера в момент11 проиэводнаяизменит свой знаклишь в моментчерез время запаэ4 Вйбй =:-:; .,дывания 7 , но с моментасигналП на вход генератора 9; поступаетчерез иннертор 3; т.е. с измененнымзнаком, который будет на выходе...
Система управления приводом летучих ножниц

Номер патента: 746418
Опубликовано: 05.07.1980
Автор: Прудков
МПК: G05B 15/02
Метки: летучих, ножниц, приводом
...летучих ножниц 1 эа цикл реза. Путь перемещения проката б измеряется датчиком 7, который подключен по схеме отрицательной обратнойсвязи по входу счетчика 11, Путьперемещения ножей измеряется датчиком 3, который подключен со знаком+ ко входу счетчика 11, Выходсчетчика 11 через преобразователь12, функциональный преобразователь13 параболического типа, обеспечивающий без перерегулирования отработку заданного рассогласования ЬГ, изадатчик ускорения 14 подключен ковходу регулятора скорости 15 и задает последнему величину перепадачастоты вращения ь привода 2 для 15 обработки рассогласования д 1 . Задатчик ускорения 14 определяет на входе регулятора скорости 15 темп изменейия частоты вращения д или ускорение привода 2. На входы регулятора 20...
Устройство для управления манипуляторами

Номер патента: 746419
Опубликовано: 05.07.1980
Авторы: Антоненко, Бондаренко, Губина, Дьяченко, Загребельный, Пастушенко, Сергацкий, Тимченко
МПК: G05B 15/02
Метки: манипуляторами
...блока программного управления,третий вход - к.первому выходу источника напряжения, а выходы коммутаторасоединены с первыми входами шаговыхдвигателей, второй вход каждого изкоторых подключен ко второму выходуисточника напряжения.На чертеже изображена,функциональная схема устройства для управленияманипуляторами. Устройство содержитблок 1 программного управления, комиутатор 2, контакты 3 - 6 коммутато-.ра,шаговые двигатели 7 манипуляторов,йсточник 8 напряжения,Устройство работает следующимобразом.При программном управлении шаговым двигателем 7 контакты 4 коммутатора 2 замкнуты и исполнительныйдвигатель 7 манипулятора по программе блока программного управленияобеспечивает перемещение рабочего746419 Формула изобретения илиал ППП Патент,...
Устройство для программного управления

Номер патента: 746420
Опубликовано: 05.07.1980
Авторы: Мишакин, Побережский, Хасаметдинов, Щипалов
МПК: G05B 19/02
Метки: программного
...дистанционные переключатели 5 и своими контактами всвою очередь изменяют цепи коммутатора 4, размыкают контакты 3,замыкают контакты 20, а другими контактами (на чертеже не показаны) выдают команды на включение управляемых агрегатов.Через вторую выдержку времени замыкается замыкающий контакт 12 блока 7, который шунтирует замыкающий контакт 16 реле контроля б.Через третью выдержку времени размыкаются размыкающий контакт 9 блока 7 переключения, обесточивающий реле контроля б, и размыкающий контакт 11 блока 7, дополнительно к контакту 10 отключающий контакты входных сиг- налов от плюсовой шины питания устройства, В результате реле контроля б отключается и размыкает свои контакты 14, 15 и 16. Это приводит к отключению блока 7 и счетчика...
Устройство для управления металлорежущим станком

Номер патента: 746421
Опубликовано: 05.07.1980
Авторы: Авдушев, Гольдшмид, Демидов
МПК: G05B 19/02
Метки: металлорежущим, станком
...по оси Е, переключатель 5 плоскости копирования, второй, усилитель 6, коммутатор 7, сумматор 8, преобразователь 9 напряжения, усилитель 10, преобразователь 11 "напряжение.фаза", ключ 12, источник 13 переменного напряжения с фиксированной фазой и фазовые дискриминаторы 14 и 15, палец 16 копировального прибора 1, и копир 17 (см, фиг, 2).Устройство работает следующим образом,При относительном перемещении копироваль. ного прибора 1 и копира в датчиках 2, 3, 4 вырабатываются сигналы, пропорциональные отклонению пальца и зависящие от утла копирования. Через контакты переключателя 5Когда палец 16 войдет в соприкосновение с копиром 17, на выходе хотя бы одного из датчиков 2, 3, 4 появится напряжение, кото. рое через усилитель 6 включит...
Программный релейный регулятор

Номер патента: 746422
Опубликовано: 05.07.1980
Авторы: Гавриленко, Иванов, Чепурных
МПК: G05B 11/00, G05B 19/02
Метки: программный, регулятор, релейный
...- импульсная,Но в этом устройстве режим работы генератора импульсов не связан А. Иванов, и В.В. Гавриленк746422 10 30 40 филиал П г. Ужгор Патент ул. Прое ая,4 На чертеже представлена функциональная схема программного релейного регулятора,.Программный релейный регуляторсодержит элемент 1 сравнения, первый элемент 2, второй релейный элемент 3, коммутатор 4, содержащийэлемент И 5, элемент ИЛИ б, элементИЛИ 7, исполнительный механизм 8,элемент ИЛИ-НЕ 9, элемент ИЛИ 10,элемент 11 задержки, элемент И 12 игенератор.13 импульсов, элемент И14.Релейный регулятор работает следующим образом,В начальный период, когда имеется большое рассогласование, включе"ны элементы 2-3. Элемент с большойзоной нечувствительности управляетисполнительным...
Фазовая следящая система с комбинированным управлением

Номер патента: 746423
Опубликовано: 05.07.1980
Авторы: Лычагин, Нещеретов, Пурвин
МПК: G05B 19/16
Метки: комбинированным, следящая, управлением, фазовая
...то для получения алгоритма" б т иуцут проходить импульсы только с третьихскоростного сигнала следует выделить девиа. входов.цию частоты в напряжении рабочего канала; вы.делить девиацию частоты в напряжении опорно- На третьи входы сумматоров 17 и 23 лого канала; вычесть из девиации частоты напря- ступают импульсы одинаковой частоты ижения рабочего канала девиацию частоты опор- сдвинутые на 90 относительно друг друга.ного канала; полученную разность девиаций Следовательно, при отсутствии импульсов начастот преобразовать в постоянное напряжение. остальных входах "этих схем, частота"импульДевиация частоты сигнала рабочего канала сов на вьгходах сумматоров 17 и 23 б детфазов аф р щаюцгего задатчика выделяется блоком одинакова. Импульсы с в...
Устройство для программного управления

Номер патента: 746424
Опубликовано: 05.07.1980
МПК: G05B 19/16
Метки: программного
...относительно сигнала датчика 10 в исходном состоянии фазовыйсдвиг между сигналом делителя 4 и сигналом з 0датчика 10 равен 180). Элемент 6 выделяетсигнал ошибки в виде аналогового сигнала,который суммируется с выходным сигналомблока 11 и поступает через сумматор 2 и усилитель 7 на привод 8, который отрабатывает з 5заданное перемещение, контролируемое датчи.ком 10.При непрерывном задании и отработке перемещения в системе устанавливается ошибка,величина которой пропорциональна фазовому 40сдвигу выходного сигнала делителя 4 относи, тельно сигнала датчика 10,В преобразователе 13 осуществляется преобразование ошибки слежения системы в про.порционэльное количество импульсов и,. 45Формирование импульсов ошибки + и осуществляется периодически...
Устройство для программного управления положением объекта

Номер патента: 746425
Опубликовано: 05.07.1980
Автор: Пилипейко
МПК: G05B 19/18
Метки: объекта, положением, программного
...устройства.Устройство содержит суммирующие счетчики 1-2 емкостью в М импульсов для ввода соответственно числовых величин (адресов) фактического и требуемого положений объекта, первый 3 и второй 4 блоки ключей для ввода числовых величин в счетчики 1-2, вычитающий счетчик 5 емкостью в М им пульсов для хранения числовой величины (адреса) фактического положения объекта, первый б и второй.7 триггеры для определения нулевого состояния соответственно счетчика 1,2, гене 5 10 15 2 О 25 ЗО 35 45 50 55 60 45 ратор 8 импульсов, импульсный датчик9 перемещения объекта, третий 10, первый 11, второй 12 ключи, первый элемент И 1 3, блок 14 управления испол-нительным механизмом, второй элементИ 15.Работает устройство следующимобразом.В исходном...
Многоканальная система программного управления станками

Номер патента: 746426
Опубликовано: 05.07.1980
Авторы: Жуковский, Калинин, Черноморов
МПК: G05B 19/418
Метки: многоканальная, программного, станками
...интерполятора 10 с ВМ осуществляется через регистр 11. Таким образом, интерполятор 10 имеет буферную память," "вйполненную в виде регистра 11 дляхранения одного кадра программа, 1 О 15 2 О 25 30 35 40 45 50 55 60 65 Поэтому интерполятор без задержки может работать с двумя кадрами программы - текущим и очередным, Первоначальный пуск станка осуществляется оператором. Запрос на очередной кадр программы формирует интерполятор 10 при отсутствии или обработке текущего кадра программы и при перезаписи содержимого регистра 11 в регистр интерполятора, В регистре 11 хранится очередной кадр программы," с момента перезаписи этот кадр становится текущим, Запрос запоминается триггером б блока 5 и с его выхода сигнал посылается на первый вход...