G05B — Регулирующие и управляющие системы общего назначения; функциональные элементы таких систем; устройства для контроля или испытания таких систем или элементов
Электрогидравлический следящий привод

Номер патента: 481713
Опубликовано: 25.08.1975
Авторы: Грузинцев, Зюзин, Казаков, Касаткин, Левин
МПК: F15B 9/03, G05B 19/04
Метки: привод, следящий, электрогидравлический
...следящий привод содержит электродвигатель 1, элемент2, червячную пару 3, плунжер 4 золотниковой пары, датчик 5 обратной связи,блок 6 задания программы, силовой циднндр 7, исполнительный орган 8 и поворотную втулку 9 эолотниковой пары.Электродвигатель 1, получив командуот блока 6 задания программы через элемент сравнения 2 начинает при помощичервячной пары 3 поворачивать плунжер4 эолотниковой пары. Одновременно вращается и датчик 5 обратной связи, вырабатывая текущий электрический сигнал,который поступает в элемент сравнения2, Текущий электрический сигнал сравнивается с сигналом, выданным блоком 6задания программы, Когда сигналы сравняются, произойдет остановка электродвигателя 1, а следовательно, и плунжера 4.1золотниковой пары. Как...
Отсчетно-измерительная система для программного управления станков
Номер патента: 481760
Опубликовано: 25.08.1975
Авторы: Богомольный, Гольдфельд, Фукс
МПК: G01B 7/02, G05B 19/02
Метки: отсчетно-измерительная, программного, станков
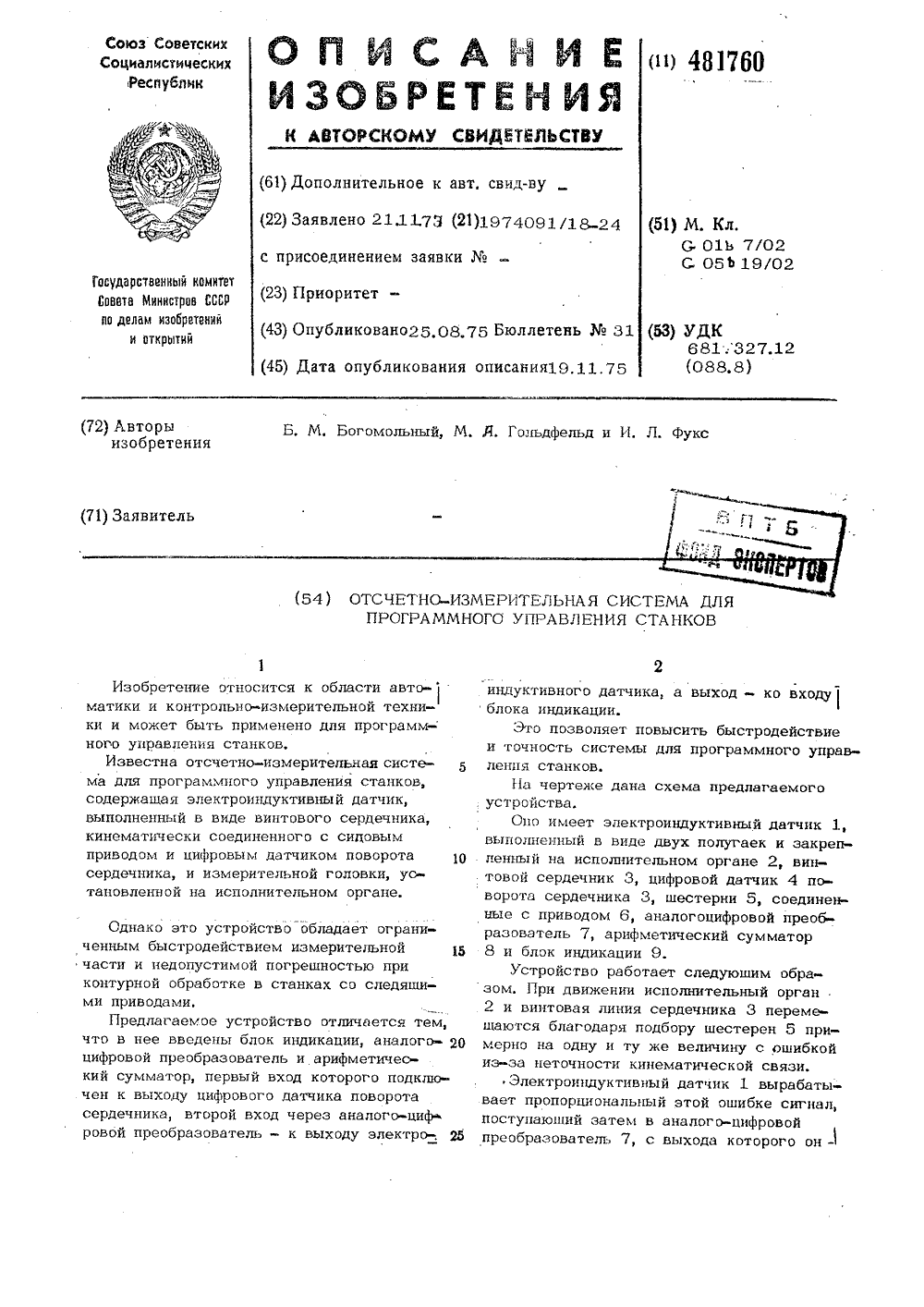
...которого подключен к выходу цифрового датчика поворота сердечника, второй вход через аналого-циф ровой преобразователь - к выходу электро-, 25 Оно имеет электроиндуктивный датчик 1, выполненный в виде двух полугаек и закрепленный на исполнительном органе 2, винтовой сердечник 3, цифровой датчик 4 поворота сердечника 3, шестерни 5, соединенные с приводом 6, аналогоцифровой преобразователь 7 арифметический сумматор 8 и блок индикации 9.Устройство работает следующим образом. При движении исполнительный орган 2 и винтовая линия сердечника 3 перемешаются благодаря подбору шестерен 5 примерно на одну и ту же величину с ошибкой из-за неточности кинематической связи.Электроиндуктивный датчик 1 вырабатывает пропорциональный этой ошибке сигнал,...
Способ сравнения электрических сигналов

Номер патента: 481875
Опубликовано: 25.08.1975
МПК: G05B 1/01
Метки: сигналов, сравнения, электрических
...разности сравниваемых сигналов, при котором разность сравниваемых сигналов суммируют с опорным сигналом и результат сравнивают с пороговым уровнем. Способ недостаточно точен из-за не- воЭможности регулирования ширины зоны нечувствительности от величины порога.Цель изобретения - повышение точности Достигается это тем, что опорный сигнал предварительно модулируют тактовой частотой.а сумма меньше пороговогсумма пересекает порогосинхронно с тактовой чассумма больше величины о уровня;вый уровеньтотой; огового уро я,аким об Т разом данный с три состояния сравнения (ср ной нечувствительности). П ние величины зоны нечувств дается величиной опорного чем величина зоны нечувств тается постоянной при любы пособ зад авнение с ри этом...
Двухдвигательный следящий привод

Номер патента: 481876
Опубликовано: 25.08.1975
Авторы: Винниченко, Друян, Кобзев, Котухов, Новоселов, Пресняков
МПК: G05B 11/00
Метки: двухдвигательный, привод, следящий
...наперед заданной скоростью, Величина этой скорости выбирается примерно равной половине номинальной скорости вращения исполнительного двигателя опорной следящей системы. Для того, чтобы при нулевом значении,скорости. изменения входной величины выходной вал дифференциала 3 оставался неподвииным, выходной вал основной следящей систе 5 мы до1 олжен вращаться с такой же по величине и обратной по знаку скоростью, что йвыходной вал опорной следящей системы 2.Это обеспечивается введением перекрестнойсвязи с выхода опорной следящей системы 10 на основную с помошью тахогенератора 7через логическое устройство 6.При превышении скорости изменениявходной величины определенного значениялогическое устройство 6 изменяет в за висимости от этого...
Способ формирования управляющего сигнала следящего привода
Номер патента: 481877
Опубликовано: 25.08.1975
Авторы: Задорожный, Новоселов, Пояганов
МПК: G05B 11/00
Метки: привода, сигнала, следящего, управляющего, формирования
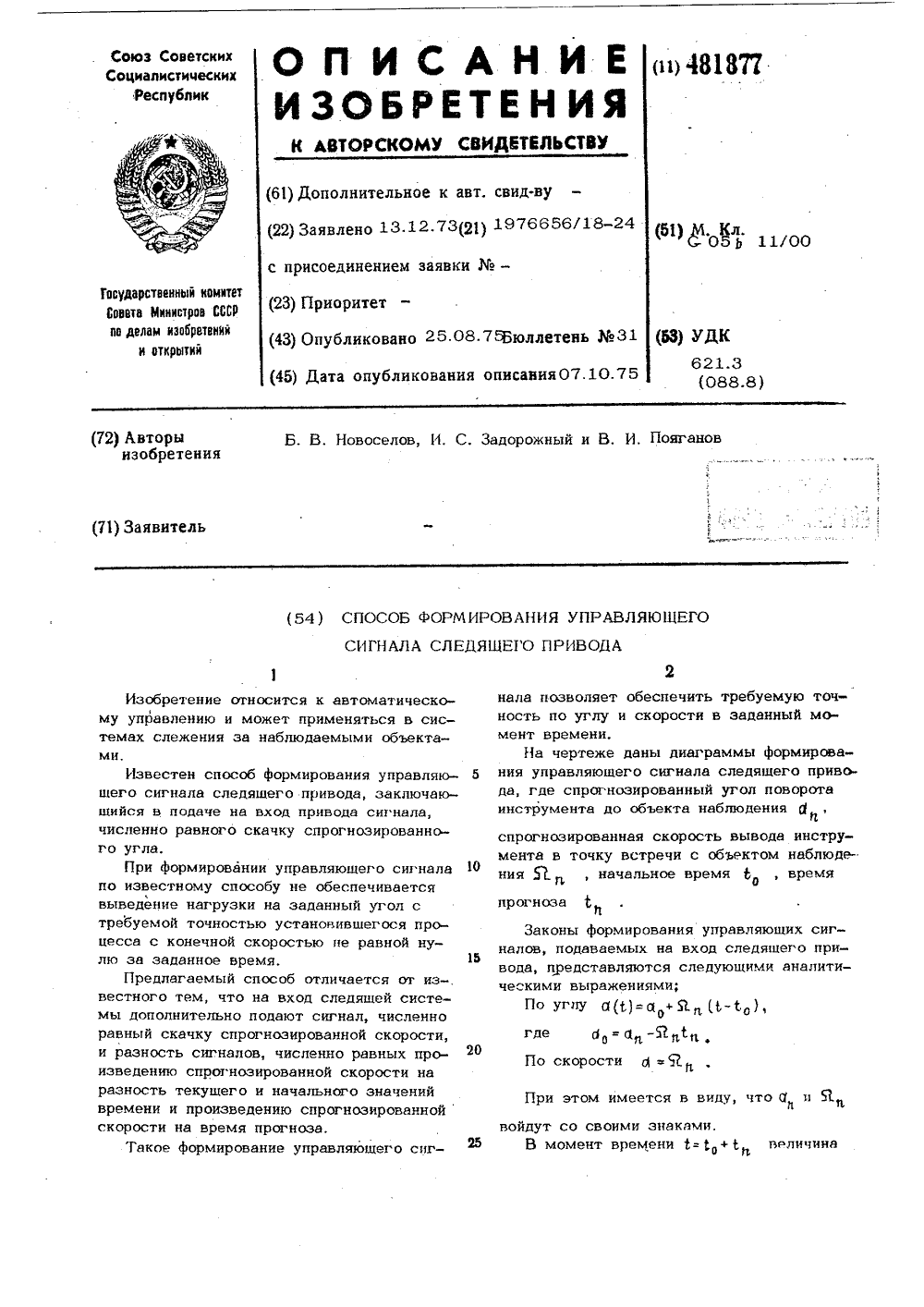
...скоростью не равной нулю за заданное время,Предлагаемый способ отличается от из-.вестного тем, что на вход следящей системы дополнительно подают сигнал, численноравный скачку спрогнозироввнной скорости,и разность сигналов, численно равных призведению спрогнозированной скорости наразность текущего и начального значенийвремени и произведению спрогнозироввннойскорости на время прогноза.Такое формирование управляющего сигспрогнозированная скорость вывода инструмента в точку встречи с объектом наблюдения Я., начальное время, время Законы формирования упрввляюш налов, подаваемых на вход следят вода, представляются следующими ческими выражениями; По углу й:и +Я.(-1),481877 Составитель Г,Романченкоич Техред И 1 арандашова Корректор Л Бр...
Гидравлический изодромный регулятор

Номер патента: 481878
Опубликовано: 25.08.1975
МПК: G05B 11/60
Метки: гидравлический, изодромный, регулятор
...что правый торец его соединен с управляющей полостью 10 гидроаккумулятора 5, а пружинная полость - с полос- тью 16. Между полостями 16 и 10 введен второй ограничитель перепада, выполненный в виде золотника 27 с отсечной кромкой 28 и пружиной . 29, Левый торец золотника соединен с полостью 16 сервопоршня 17, а пружинная полость - с управляющей полостью 10 гидроаккумулято 1 ра 5, Полость 10 соединена дозируюшей45 кромкой 28 и каналом 15 со сливом 26 через сопло 4.Предлагаемый регулятор работает следующим образом.На установившихся режимах, когда уси 50 лне от центробежного датчика 1 уравновешивается пружиной 2, маятник 3 открывает сопло 4 так, что в полости 16 устанавливается давление, поддерживающее65 сервопоршень 17 в равновесии, В этот...
Многоканальный автоматический оптимизатор

Номер патента: 481879
Опубликовано: 25.08.1975
МПК: G05B 13/02
Метки: автоматический, многоканальный, оптимизатор
...через ин- О вертор - к выходу дифференциатора, а выход - к входу релаксационного генераторНа чертеже дана блок-схема предлагаемого оптимизатора,Выходная величина обьекта управления дифференцируется дифференциатором 2 и производная - в зависимости от состоянияаад,переключателя 4 подается на вход релаксационного генератора 5 или непосредственно,или через инвертор 3. Состояние переключателя 4 определяется одновибратором 6,который подключает через инвертор 3 производную Ю на вход генератора 5 наД 1заданное время после каждого срабатывания релаксационного генератора 5.ЙОВремя включения производной через иивертор устанавливается с учетом динамических свойств обьекта упрвления.11 прилар, если обьект илеет запаздывание "ь, то это время...
Автоматическая система оптимизации

Номер патента: 481880
Опубликовано: 25.08.1975
Автор: Широков
МПК: G05B 13/02
Метки: автоматическая, оптимизации
...6, сумматора 7, вычислителя 8 основного приращения параметров,анализатора 9 чувствительности, вычислителя 10 производной функции выходных20 координат и генератора 11 весовой функ- .ции времени,Система работает следуютцим образом.Входной сигнал 3 поступает на первыйвход объекта 1 оптимизации, первый выИ ход которого, соответствующий сигналу481880 управления у, сравнивается в устройстве контроля 2 с сигналом у задатчика 3Р 1ограничения управляющего воздействия. При превышении сигналом у величины у сраба 5 тывает переключатель 4 и сигнал управ;лепия у поступает на анализатор чувствительности 5 управляющего воздействия к нарастаиваемым параметрам,", подключенный к вычислителю 6 дополнительного Ю приращения параметров ЙЯ 1, выход котоИ...
Устройство для задания команд

Номер патента: 481881
Опубликовано: 25.08.1975
Авторы: Арушанов, Тандашвили, Твадзе
МПК: G05B 19/16
...26,. Устройство работает следуюшим образом.фазоимпульсньте двухполярные сигналыс головки магнитной 1 и 2 поступают на.ход усилителей воспроизведения 3 и 4, где они усиливаются и подаются на входы фазорасшепителей 5 и 6 соответственно.Фазорасшепители 5 и 6 расшепляют сигналы по фазе и на первом выходе получают импульсы положительного полупериода, а на тором - импульсы отрицательного полупериода, С выхода фазораслгепителя 5 импульсы инертируютсяинвертором 7 и поступаот па вход элемента совпадения 12, на второй вход которого поступают задержанные импульсы с выхода одновибратора 16. В результате совпадения и инвертирования на входе эледмента совпадения 12 получают импульсд только с отрицательной фазой, которые являются сигналами...
Устройство для централизованного управления строительным производством

Номер патента: 481903
Опубликовано: 25.08.1975
Авторы: Колесниченко, Полосков
МПК: G05B 19/409, G06F 17/00
Метки: производством, строительным, централизованного
...отправку. При зтои из схемы 15 выбора номера обьекта поступает сигнал в блок 11 программ поставок, Из последнего значения интервалы времени между очередными отправками (или прибытиями транспорта под погрузку), равные средним (нормативным) затратам времени на монтаж комплектов изделия, двоичным кодом поступают в схему 17 формирования значений времени, Одновременно с этим сигнал со схемы 15 выбора номера обьекта поступает в схему 16 коррекции ритма поставок, которая вырабатывает сигналы коррекции интервалов времени между очередными отправками, поступающими в схему 17 формирования значений времени. Величина сигналакоррекции в схода. 16 коррекции ритма Фпоставок может быть задана обслуживающим персоналом по входу б" с учетомконкретных...
Схема для управления автоматическими коробками скоростей металлорежущих станков

Номер патента: 482715
Опубликовано: 30.08.1975
Автор: Ильичев
МПК: G05B 11/01
Метки: автоматическими, коробками, металлорежущих, скоростей, станков, схема
...прц наличии питающих напряжений переключатели 7 - 12 закрыты, муфты 1 - 6 обесточены. Микротиристоры19 - 2/ выключены, индикаторные лампы 28 -36 ооссточены, контакты 37 - 45 разомкнуты,контакт реле 47 замкнут. При нажатии на любую цз клавиш, например 37, контакт замкнется и напряжение источника через согласующий резистор поступит на управляющийэлектрод микротиристора 19, переводя его вприводящее состояние. Микротцристор 19 откроется, замкнет цепь питания индикаторнойлампы 28, ц на табло появится цифровое изображение выбранной скорости вращения выходного вала. Клавиша 37 может быть отпу48271 о Составитель В. КазаковРыбалова Техред 3. Тараненко Корректор О. Тю едакт каз 2657ЦНИИП Изд.1733Государственного к по делам изобре 3035,...
Следящая система

Номер патента: 482716
Опубликовано: 30.08.1975
Авторы: Ротермель, Седых, Шульгин
МПК: G05B 11/01
Метки: следящая
...вырабатывающий импульс определенной длитель ности для управления форсирующим устройством 8.Форсирующее устройство 8 состоит из ограничителя 9, представляющего собой два встречно включенных стабилитрона, и ключе вого элемента 10.Пороговый элемент 6 обеспечивает форсированный режим системы при разгоне и торможении для рассогласований, больших величин порога срабатывания (фиг. З,а), В про цессе отработки таких рассогласований элемент 6 вырабатывает прямоугольный импульс (фиг. З,б), от заднего фронта которого срабатывает формирователь импульса 7, выдает на ключевой элемент 10 управляющий пмпульс 30 (фиг, З,в), длительность которого должнабыть достаточна для торможения системы и определяется постоянной времени исполнительного устройства 4:У...
Следящий привод

Номер патента: 482717
Опубликовано: 30.08.1975
Автор: Панагриев
МПК: G05B 11/06
...двигателя.Это позволяет прн синхронной связи нескольких пзр валов для каждой пары иметь в сосд 1 нитсльной липни только один провод и один общий провод для всех синхронно связанных валов.На чертеже приведена структурная схема предлагаемого следящего привода,Он содержит ведущий вал 1, датчик 2 углов рассогласования, приемник 3 углов рассогласования, редуктор 4 ведущего вала, усилитель 5, промежуточный исполнительный двигатель б, соединительнуо линию 7, выходной исполнительный двигатель 8, редуктор 9 следящего вала, следящий вал 10, обмотку рслс 11, контакты 12 реле на замыкание.Ведущий вал 1 механически связан (показано пунктирной лннисй) с осью датчика 2.Датчик 2, приемник 3, редуктор 4, усилитель 5 и промежуточный исполнительный482717...
Система дистанционного управления

Номер патента: 482718
Опубликовано: 30.08.1975
Автор: Ахметжанов
МПК: G05B 11/12
Метки: дистанционного
...ЦВМ после преобразования в соответствующие аналоговыесигналы, изменяющиеся пропорциональноЯп п р и Сов пр р, где ир - передаточноеотношение электрической редукции, пода 1 отсяна статорные обмотки двухполюсного СКТприемника 2, ротор которого отрабатываетсядвигателем 4 до тех пор, пока выходной сигнал на роторной обмотке не станет равнымнулю. Для передачи угла в масштабе 1:1 свысокой точностью создается дополнительныйканал с датчиком 11 с электрической редукцией пр и приемником 12 - двухполюсным СКТ,как в основном канале. Выходные углы основЛакая 2557 Изд Ю 1733 1 ираяк 869 Подписное гНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035,Чосква, Ж, Раушская иаб., д. 1,5т 1 ереповецкая...
Устройство для позицирования гидропривода, например, промышленного робота

Номер патента: 482719
Опубликовано: 30.08.1975
Авторы: Грузинцев, Зюзин, Зюзина, Казаков, Касаткин, Левин
МПК: G05B 11/18
Метки: гидропривода, например, позицирования, промышленного, робота
...и ряда неподвижно закрепленных элсктромагнитных фиксаторов 8, силовой пдропривод, например гидроцилшдр 9, и испол.цитсльцый орган О.Работает устройство следующим образом.Каждый кулачок 7 выставляется в фиксированное положение в процессе настройки робота. От блока 1 задания программы подается сигнал на срабатывание одного из электромагнитных фиксаторов 8 и, с небольшой задержкой времени, сигнал на блок 2 управлсшя, Электродвигатель 3, получив команду от блока управления, начинает при помощи персдячи 4 поворачивать золотник 5. Одновременно вращяотся кулачки 7 датчика обратной связи. Вращение золотника происходит до тех пор, пока один из кулачков не будет застопорен соответствующим электромагнитным фиксатором 8, на который подан сигнал от...
Устройство для многопозиционного управления пневмоприводом

Номер патента: 482720
Опубликовано: 30.08.1975
Авторы: Грузинцев, Зюзин, Зюзина, Казаков, Касаткин, Левин
МПК: G05B 11/18
Метки: многопозиционного, пневмоприводом
...гидрозапоров 9,соединенных дополнительным каналом 11.30 Гидрозапор перекрывает дополнительный ка10 3нал 11, С некоторой задержкой времени, после подачи управляющего сигнала на один из дистанционных гидрозапоров 9 от задающего блока 1 подается управляющий сигнал на воздухораспределитель 2, и шток пневмоцилиндра 3, а также связанный с ним шток гидроцилиндра 4 приводятся в движение. В гидроцилиндре 4 начинается циркуляция жидкости через основной 10, дополнительный 11 и соединительные 12 каналы, При движении штока силового пневмоцилиндра 3 упор 6, расположенный на тяге 5, жестко связанной со штоками пневмоцилиндра 3 и гидроцилиндра 4, поочередно воздействует на концевой гидрозапор 7, концевые гидрозапоры 8 и тем самым несколько раз...
Цифровая следящая система

Номер патента: 482721
Опубликовано: 30.08.1975
Авторы: Потапов, Рубцов, Шетлер
МПК: G05B 11/26
...импульс. Он задерживается на элементе 3 на время, равное времени установления элементов схемы после включения источника питания, и попадает на вход установки О 15 триггера 4 и входы установки О усилителя.При этом с единичного выхода триггера на элемент 5 совпадения поступает запрещающий потенциал (О). Импульсы опорной частоты тГо не подаются на вход делителя 6 до тех 20 пор, пока на вход установки 1 триггера непоступит сигнал с выхода формирователя 1 импульсов. При поступлении импульса на вход установки 1 триггер опрокидывается, на вход элемента 5 совпадения подается раз решающий потенциал (1) и импульсы опорной частоты тГо, пРойдЯ чеРез элемент совпадения, появляются на входе делителя.Фааа ВЫХОДНОГО СИГнаЛа вых,вых = =1 с 1т...
Импульсный пневматический регулятор

Номер патента: 482722
Опубликовано: 30.08.1975
Авторы: Зотов, Киклевич, Политыкин
МПК: G05B 11/52
Метки: импульсный, пневматический, регулятор
...с проточ 1 ь 1 м 11 кя)В 1)ями элсмс 11 та срявпс 1 ия соп,я которого соединены непосредственно с вхо г дами сумматора и черсз дросселпс атмосфсрой.ЗТО позволяет простить регул 51 тор.11 я 1 ертежс приВедспя принци пиалыЯ 51 схема предложенного регулятора, 20Регулятор содер)кит корректор 1, элемент сравнения 2, дроссели 3 и 4, сумматор 5, пуль- сируощий дроссель, выполненный на клапанах Й и 7 и с)1 кости 8, зЯдатчик 9 тактовых Импульсов и усилитель мощности 1 О.25Вьход корректора подкл 1 очеи к проточным камерам элемента сравнения, сопла которого соединены непосредственно с входами сумматора и через дроссели с атмосферой. Входы элемента сравнения подключены к каналу ре 1 улнрусмой величины Р, и к каналу задающего воздействия Рг...
Гидравлическое реле времени

Номер патента: 482723
Опубликовано: 30.08.1975
МПК: G05B 11/60
Метки: времени, гидравлическое, реле
...магистраль 17.Жидкость из полости Д вытесняется под действием пружины 3. Выход жидкости из полости Д в полость Г перекрыт гладкой цилиндрической поверхностью дросселя.Выдержка времени длится до тех пор, пока вытекает жидкость из полости Д. По окончании стока плунжер 2 сообщает кольцевые канавки 17 и 18, и поток жидкости проходит от отверстия е к отверстию и и далее по магистрали И 1 в первую торцовую полость Е распределителя 10, золотник которого, перемещаясь влево, соединяет напорную магистраль 1 со штоковой полостью цилиндра 11. После выдержки на упоре рабочий орган реверсируется, по его приходе в крайнее левое положение кулачок 19 переключает пилот 12 в первоначальное положение, и цикл повторяется.При подаче жидкости в левую торцовую...
Устройство для программного управления процессами глубокого анодирования
Номер патента: 482724
Опубликовано: 30.08.1975
Авторы: Гарбузов, Гниленко, Дряглев, Лившиц, Чуденко
МПК: G05B 19/04
Метки: анодирования, глубокого, программного, процессами
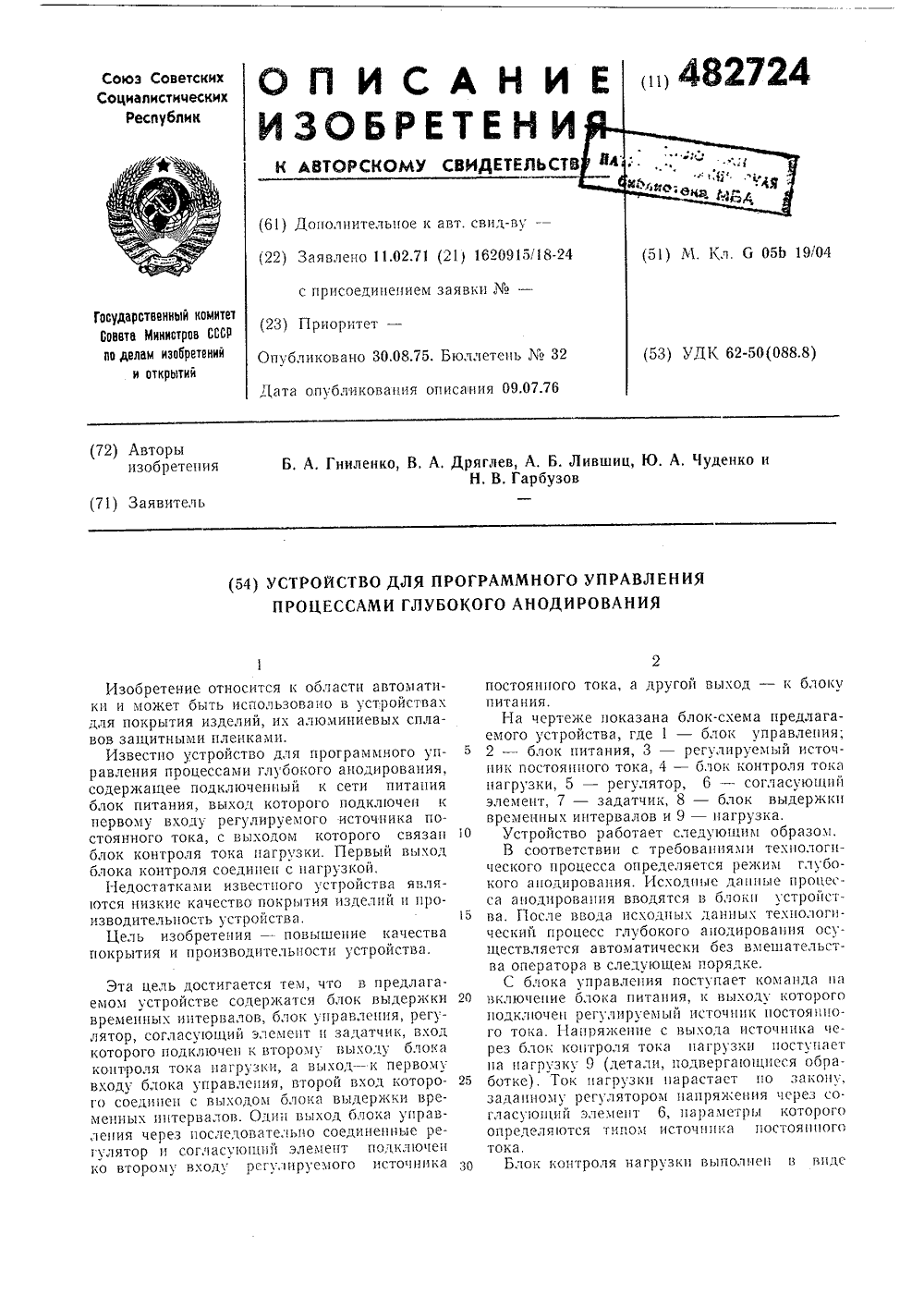
...выдержки временных интервалов и 9 - нагрузка,Устройство работает следующим образом.В соответствии с требованиями технологического процесса определяется режим глубокого анодирования. Исходные данные процесса анодирования вводятся в блоки устройства. После ввода исходных данных технологический процесс глубокого анодирования осуществляется автоматически без вмешательства оператора в следующем порядке.С блока управления поступает команда на включение блока питания, к выходу которого подключен регулируемый источник постояипого тока, НапРяжение с выхода соиа через блок контроля тока нагрузки поступает на нагрузку 9 (детали, подвергающиеся обработке). Ток нагрузки нарастает по закону, заданному регулятором напряжения через согласующий элемент...
Устройство для коррекции эквидистанты в фазовых системах числового программного управления
Номер патента: 482725
Опубликовано: 30.08.1975
Автор: Соколов
МПК: G05B 19/16
Метки: коррекции, программного, системах, фазовых, числового, эквидистанты
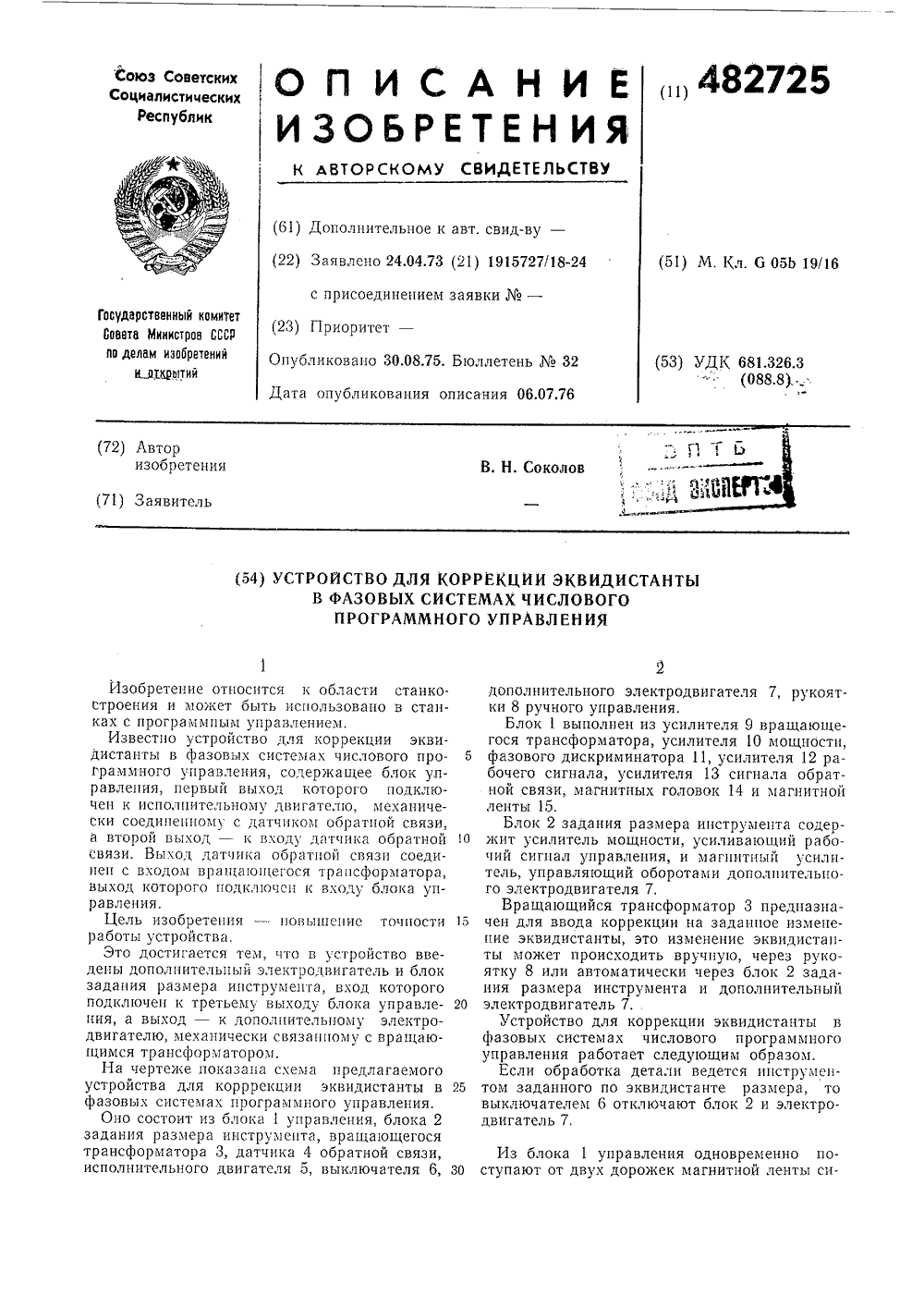
...подаетсяси;1 епп.1 Й р 1 бочи 1 спгпял.В результате суммирования этих сигналов ца выходе фазового дискриминатора получается сигнал ошибки следящего привода. Далее этот сигнал усиливается усилителем 10 мощности и поступает па исполнительный двигатель 5. рабочего органа станка, который стремится установить управляему 1 о координату в такое положение, когда сигнал ошибки равец или близок к цу,1 о. По окоцчяпии обработки инструмент отходит в исходное положение и станок выключается,Для коррекции эквидистапты, цри техцологической цеобходимости большего цли мецьшего размера режущего инструмента, до начала обработки выключателем 6 подключают блок 2 и электродвигатель 7. При помощи органа управления магнитным усилителем устанавливают...
Устройство для монтажа жгутов

Номер патента: 482726
Опубликовано: 30.08.1975
МПК: G05B 23/00
...и предлагаемое устройство введен блок памяти, вход которого подключен к второму выходу, а первый выход - к второму входу блока управления. Остальные выходы подсоединены соответственно к клеммам монтажного шаблона,На чертеже показана ооцая олок-схема устройства.Устройство для монтажа жгутов содержит блок 1 считывания, блок 2 управления, первый выход 3 и первый вход 4 которого подсоединены соответственно к входу 5 и выходу 6 блока считывания, блок 7 памяти, вход 8 которого подключен к второму выходу 9, а первый выход 10 - к второму входу 11 блока управления, и монтажный шаблон 12 с прижимными клеммами 13.В блок 7 памяти введен дешифратор 14, каждый выход которого одназначно соединен с соответствующей ячейкой 15 памяти, а каждая...
Бесконтактная следящая система постоянного тока

Номер патента: 483650
Опубликовано: 05.09.1975
Автор: Михалев
МПК: G05B 11/10
Метки: бесконтактная, постоянного, следящая
...2, выходное напряжение которого У, поступает на выпрямитель 3. Выходное напряжение /У,/выпрямителя 3 суммируется в сумматоре 4 с напряжением выпрямителя 5, преобразующего пе ременное напряжение синхронного тахогенератора 6 в постоянное напряжение/Уа/. С выхода сумматора 4 напряжение У, поступает на вход широтно-импульсного модулятора 7.Импульсы модулятора 7 с относительной О длительностью т, пропорциональной напряжению У подаются на коммутатор бесконтактного двигателя постоянного тока 8, выходной вал которого соединен с редуктором 9 и синхронным тахогенератором 6.5 Напряжение У, подается на вход реле реверса 10, а выходной вал редуктора 9 связан с элементом сравнения 1.При работе системы реле 10 срабатываетпри сменах знака...
Устройство для останова агрегата по заданному теоретическому весу проката

Номер патента: 483651
Опубликовано: 05.09.1975
Авторы: Мурахин, Павлов, Романов
МПК: G05B 11/14
Метки: агрегата, весу, заданному, останова, проката, теоретическому
...3 содержит счетчик величиныупреждения 7, подключенный к первому и второму входам блока через электронные ключи 8 и 9, управление которыми осуществляется триггером 10.25 Устройство работает следующим образом.По шине импульсов счета на входы счетчиков 1 и 2 поступают импульсы счета, Триггер управления 10 при этом находится в таком исходном состоянии, при котором ключ 8 от крыт, а ключ 9 закрыт, Импульсы с ячейкии; через второй выход счетчика 1 поступают на второй вход блока 3 и через ключ 8 в счетчик 7.Как только в счетные ячейки 4 счетчика 2 поступит число импульсов, соответствующее состоянию дешифратора 5 (число выбрано таким, чтобы агрегат успел к этому времени набрать максимальную скорость), с первого выхода счетчика 2 на...
Регулятор

Номер патента: 483652
Опубликовано: 05.09.1975
Авторы: Зонов, Попов, Поскряков, Шадрин
МПК: G05B 11/26
Метки: регулятор
...форму;Р,р - величина намагничивающей силысрабатывания геркона;Т - период питающего напряжения катушек возбуждения герконов. Как видно из фиг. 2, б, 2, в скважность раГ Иботы геркона и зависит от величиТ Тны перемещения и используется в датчикахперемещения.Схема регулятора выполнена компенсационной и работает следующим образом.В нормальном состоянии контролируемого параметра постоянные магниты 1, 4 находятся в среднем положении между герконами 2, 3 и 6, 7. Скважности работы герконов 2, 3 и 6, 7 датчика перемещения и элемента обратной связи соответственно равны, и на выходах схем сравнения 11 имеется сигнал, запрещающий прохождение сигнала через логическую схему запрет 9 и отключающий управляющее устройство 10.При отклонении...
Регулятор

Номер патента: 483653
Опубликовано: 05.09.1975
МПК: G05B 11/32
Метки: регулятор
...Если заданное на пряжение больше, чем вычисленное на величину, превышающую зону нечувствительности, нуль-орган 2 генерирует последовательность импульсов, а нуль-орган 1 заторможен. Последовательность импульсов с нуль-органа 2 з 0 через элемент ИЛИ 3 запускает мультивибратор 4, у которого собственная задержка в несколько раз превышает период следования импульсов обоих нуль-органов. Поэтому на входе элемента И 5 имеется постоянный сигнал, и импульсы генератора 6 проходят на счетный вход первого разряда счетчика 7. Последовательность импульсов с нуль-органа 2 переключает триггер 8 в положение, соответствующее режиму вычитания счетчика 7, При этом число, записанное в нем с приходом очередного импульса с генератора 6, уменьшается на...
Устройство для определения динамических характеристик колебательных систем

Номер патента: 483654
Опубликовано: 05.09.1975
Авторы: Аступенас, Атступенене, Рагульскис
МПК: G05B 23/02
Метки: динамических, колебательных, систем, характеристик
...моментов, функциональный преобразо ватель 18 с выходом 19.Устройство работает следующим образом.На вход предварительно настроенного блока 4 подается сигнал генератора 3, а на входы блока 5 - напряжение блока 6 и выход ной сигнал блока 4, В результате деления этихвеличин на выходе блока 5 получается сигнал, пропорциональный переменному коэффициенту, подаваемый на один из входов блока 7. Другой вход этого блока соединен с ис точником 2. На выходе 8 образуется сигнал,пропорциональный незатухающему закону движения х (1). Выходной сигнал узла 1 (а в случае, когда исследуемая система совершает незатухающие колебания, выход источника 2) ЗО подается на вход схемы 9, на выходе которой483654 10 15 20 оставитель Ю. Мручнов Техред Е, Подурушина...
Устройство для программного регулирования

Номер патента: 483660
Опубликовано: 05.09.1975
Автор: Бруфман
МПК: G05B 19/04, G05D 23/19
Метки: программного
...знака наклона трапециевидной программы.Блок памяти 2 предназначенния регулируемого параметра нваемое длительностью импульса483660 Составитель С, БруфманТехред Е. Подурушина Корректор Т. Добровольская Редактор Л. Утехина Заказ 3019/10 Изд.971 Тираж 869 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Типография, пр. Сапунова, 2 Это время определяется постоянной дифференцирования регулируемого параметра.Датчик обратной связи 3 предназначен для измерения регулируемого параметра объекта 4 с нагревателями 5. Элемент задержки 6 формирует сигналы изменения программы: режим нагрева, режим стабилизации и режим охлаждения. Сигналы в виде постоянного...
Устройство для компенсации помех

Номер патента: 484493
Опубликовано: 15.09.1975
Авторы: Кочетов, Кунавин, Сорокин
МПК: G05B 5/01
Метки: компенсации, помех
...элемента 7, порог чувствительности которого равен уровню ограничения. Релейный элемент 7 в соответствии сполярностью управляющего сигнала подключает своими контактами - (или +) источника постоянного тока, напряжение которого484493 Предмет изобретения Составитель Н, ТарасоваТекред Л. Казачкова Корректор И. Позняковская Редактор Т, Юрчикова Заказ 31169 Изд. Мо 1786 Тирак 869 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, Ж, Раушская наб., д. 4/5Типография, пр. Сапунова, 2 равно уровню ограничения, к входу элемента сравнения 5.В начальный момент ограничения разностпый сигнал с выхода элемента 5 подается на вход релейного элемента 8 по цепи: диод 9 (или 10) - интегратор 3 - элемент...
Устройство для группового управления п-гидроагрегатами

Номер патента: 484494
Опубликовано: 15.09.1975
Авторы: Вахрамеев, Захаров, Фельдман
МПК: G05B 11/01
Метки: группового, п-гидроагрегатами
...число импульсов; и счетчик числа работающих гидроагрегатов 8, выполняющий функции подсчета работающих гидроа грега тов,Входы счетчиков 5 и 6 соединены с выходом преобразователя аналог - код 4, с выходом счетчика числа работающих гидроагрегатов 8 и с выходом корректирующего блока 7.Выходы коммутационного блока 3 подсоединены к входам гидроагрегатов 9.Задатчик требуемой суммарной активной мощности ГЭС 10 подает сигнал, пропорциональный требуемой суммарной активной мощности ГЭС, и соединен с преобразователем аналог в к 4, а датчик сигнала напора воды ГЭС 11 выдает сигнал напора воды ГЭС и соединен с корректирующим блоком 7.Устройство работает следующим образом, В зависимости от требуемой суммарной активной мощности ГЭС Р...