Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
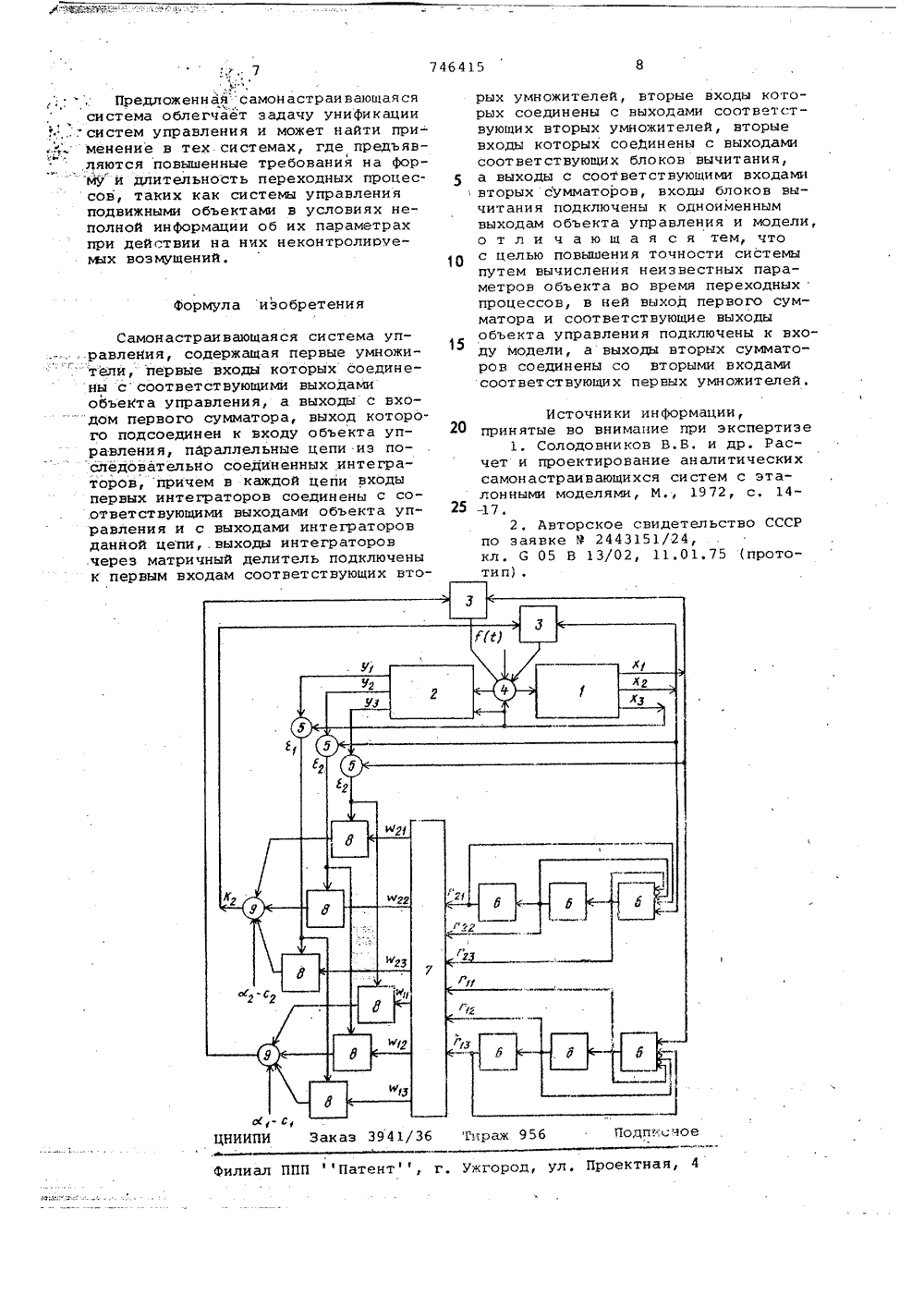
1746415 Союз СоветскихСоциалистическихРеспублик Оп ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 1(22) Заявлено 0%0278 (21) 2578091/18-24 (51) М. НЛ.2 6 05 В 13/00 с присоединением заявки М Государственный комитет СССР о делам изобретений и открытий(088. 8 Дата опубликования описания 070780(72) Авторы изобретения К. А. Пупков, Б.И, Прокопов и О.Ю. Копысов Московский институт электронного машиностроения(54) САМОНАСТРАИВАКЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ1 Изобретение относится к автомати. ческому управлению и регулированию в частности касается системы управления и стабилизации подвижными 5 объектами, сложными радиотехническими комплексами, промышленными роботами и т.д.Известны самонастраивающиеся системы управления, содержащие модель блоки вычитания, сумматор, умножители и интеграторы, предназначенные для работы с объектами, у которых численные значения параметров неизвестны и могут изменяться в широкомдиапазоне (1).Известные самонастраивающиеся системы обладают тем недостаткбм, что неизвестные параметры могут быть вычислены только после окончания переходных процессов в системе.При этом точностЪ вычисления неизвестных параметров зависит от вида воздействий, поступающих на объект и модель. Эти недостатки снижают точ 25 ность работы самонастраивающихся систем управления, сужают их область применения,Известна также самонастраивающаяся система управления, содержащая первые умножители, первыевходы которых соединены с соответствующимивыходами объекта управления, а выходя с входами первого сумматора,выход которого подсоединен к входуобъекта управления, параллельныецепи иэ последовательно соединенныхинтеграторов, причем в каждой цепивходы первых интеграторов соединеныс соответствующими выходами объектауправления и с выходами интеграторов данной цепи, выходы интеграторов через матричный делитель подключены к первым входам соответствующихвторых умножителей, вторые входыкоторых соединены с выходами соответствующих вторых умножителей, вторыевходы которых соединены с выходамисоответствующих блоков вычитания, авыходы с соответствующими входамивторых сумматоров, входы блоков вы.читания подключены к одноименнымвыходам объекта управления и модели (2 .недостатком известной является недостаточно высокая точность, связанная с невозможностью вычисления идзвестных параметров объекта воМодель 2т(И = СИ)-бх Югде у = (у у )и 6 иН)У(1), УГО)= г(2вектор выходных координамодели 2,время переходных процессов в систе- ме.Целью изобретения является повышение точности системы путем вычисления неизвестных параметров объекта во время переходных процессов.Поставленная цель достигается тем, что в системе выход первого сумматора и соответствующие выходы объекта управления подключены к входу модели, а выходы вторых сумматоров соединены со вторыми входами соответствующих.первых умножителей.На чертеже представлена самонастраивающаяся система управления объектом третьего порядка (п=З), имеющего два неизвестных параметра (п 1 = 2).Система содержит объект управления, модель 2, первые умножители 3, первый сумматор 4, блоки 5 вычитания интеграторы. 6, матричный делитель 7, вторые умножители 8, вторые сумма. торы 9, выходные координаты х , хобъекта управления, выходйые координаты у , у, у модели 2, выходные координатй , г, Сз блоковвычитания, выходные сигйалы г, г г, г, интеграторов б первой параллельной цепи, выходные сигналы гг, гг йнтеграторов б второй параллельйой,цепи, выходные сигналы ф ф 89 , г ага ф багз матричного делителя 7, выходные координаты -к -к вторых сумматоров 9, извест 4 ф 4ные постоянные сигналы с 1-ст, с 1 г-с входное воздействие Е .Работа самонастраийающейся системы управления описывается следующими уравнениями Объект управления т=Дх(Ц Ь Га, (О)=.,(,)т где х = (х х) - вектор выходных координат объекта управления, т - символ транспортирования, А - матрица неизвестных параметров объекта управления, Г(С) в (их 1) - вектор входного воздействия, Ь-(и х 1) - вектор столбец, ц (с) - управляющеевоздействие:0 1 О0 0 А= 000 0О О Оге О 0-С, а, -С, параметровсщ+, и иобъекта 1 вида 0О 0"О 0 " О 0" О 15О, -С; ".а-С О" От+ т+ и иизвестные параметры а,-с в. С расуположены на тех же местах, что и вматрице А.Выходные координаты Е Епблоков 5 вычитания описываются алгебраическим уравнениемЯ = х- у, (3)а также удовлетворяют дифференциальному уравнению25 Е ф = СЕ. И)+ Хйс(, Е- (О) = 0 утс. = ,1 - вектор выходи 1ных координатблоков вычита- ЗОООХиг(пх ш) матрица в которой х;,.х- вылгпходные координаты объекта 40 упр авле ни я принеизвестных параметрах;ос =(С; -а; ,С; -а;,- постоянный вектор, в котором 45 а,а - неизвестные коэфгде 0 ф= 0 Х, фициенты матрицы А объектауправления,с; с; - коэффициентытизвестной матрицы С,Выходные сигналы интеграторов6 удовлетворяют матричному дифференциальному уравнениюК(1) =СЙЮ+ Е(Ц, К(0) - О, (5)где Р (1) - (ив) - матрица,управляющее воздействие с) формируется ввидеи(О=- к х(0,(О О к О . О к О О 3векторы, размеров (1 си) У которыходноименные компоненты не равны нулю одновременно.Иэ нулевых компонент )с; )слфгвектора 1 образует вектор Й,"=с)с;Д, который вычисляетсяпо формулек Ф с с Р Шбт, (8)где Й = (Й; Й, ,с; - (с,т фс, ) - известные векторы размерности (1 п.) .Матрица Н размеров (щ и) вычисляется по формулеттй =т (К К) Й если де 1 Я Р) Ф О,тО, если деУЯ Р) = О.Отличные от нуля компоненты вектора ) вычисляются по формуле= ф а(= 1,", и-пч). (10)В формуле (10) о, - известные коэффициенты матрицы А объекта управления, Й - заданные константы,3 рСамонастраивающаяся система управления работает следующим образом.Объект управления имеет неизвестные параметры а и а, параметра - известен. Йзмерению доступнывходное воздействие М, управляющеевоздействие й и выходные координатыобъекта управления 1: х, х, хэНеизвестные постоянные параметры а,а объекта управления непосредственно измерены быть не могут.Для управления объектом с помощью самонастраивающейся системы одноименные выходные координаты объекта управления и модели 2 сравниваются на блоках 5 вычитания по формуле (3) .Выходная координата хобъектауправления соединена с входом интегратора б, стоящего первым в цепииз и = 3 последовательно соединенныхинтеграторов б, образующих первуюпараллельную цепь. Аналогично соединена выходная координата х со второй цепью из и = 3 последовательносоединенных интеграторов б, Общеечисло таких параллельных цепей равно в = 2, т.е. числу неизвестных коэффициентов матрицы А. Выходная координата хз объекта управления подключена к входу модели 2. Числои = 3совпадает с порядком дифференциального управления, которое описываетобъект управления,Выходы интеграторов б,стоящие водной параллельной цепи, соединены с,-а, д-о5 - (иси) - матрица. Окончательно иэ (11) получаемХЯ)=.ОХР)+ ГЮ Х(0): Хц(12)гдеООО О600= О О О". О О б 5 -, (и и) - матрица. входом первого интегратора б этойцепи, Параллельные цепи из последовательно соединенных интеграторов бвыполняют интегрирование матричногодифференциального уравнения (5),Выходы всех интеграторов б подключены к входу матричного делителя 7, вычисляющего матрицу В+ поФормуле (9) .Выходы И 0,матричного делителя 7соединены с первыми входами соответствующих вторых умножителей 8, совторыми входами которых соединенывыходы соответствующих блоков вычитания, а выходы вторых умножителейподключены к входам соответствующих15 вторых сумматоров 9.Вторые умножители, первые входыкоторых присоединены к выходу матричного делителя 7, и вторые сумматоры 9 производят вычисления по фор 20 мулам (7) и (8),Выходы вторых сумматоров 9 подключены ко вторым входам соответствующих первых умножителей 3, первыевходы которых соединены с соответст 25 вующими выходами объекта управления,а выходы первых умножителей 3 соединены с входом первого сумматора4. Выход первого сумматора 4 присоединен к входам объекта управления3 и модели 2На выходе первого сумматора 4 формируется сигнал Р(1) + (1), в котором управляющее воздействие м вычисляется по Формуле (б) .После вычисления по Формулам (8)+ 1(,) является Функцией теперь ужеизвестных параметров а; объекта управления и заданных констант Й; .управление (7) обеспечивает заданный4 О вид переходных процессов по выходным координатам х 1(Ф.),:,хобъекта управления, который полностью определяется коэффициентамиЙ( Р = 1,и), задаваемыми по желанию.45 Подставляя в уравнение объектауправления (б), учитывая (7), (8) и746415 Формула изобретения Ф ФИИПИ Заказ 3941/36 Тираж 956 Подпксно Ф ППП Патент, г. ужгород, ул. Проектная 7Предложен н ая самон астр аи вающая сясистема облегчает задачу унификации ;, систем управления и может найти применение в тех системах, где предъявляются повышенные требования на форь и длительность переходных процессов, таких как системы управления подвижными объектами в условиях неполной информации об их параметрах при действии на них неконтролируежх возмущений,Самонастраивающаяся система управления, содержащая первые умножители, первые входы которых Соединены с соответствующими выходами объекта управления, а выходы с вхо-дом первого сумматора, выход которого подсоединен к входу объекта управления, параллельные цепи из последовательно соединенных интеграторов, причем в каждой цепи входы первых интеграторов соединены с соответствующими выходами объекта управления и с выходами интеграторов данной цепи,.выходы интеграторов .через матричный делитель подключены к первым входам соответствующих вторых умножителей, вторые входы которых соединены с выходами соответствующих вторых умножителей, вторыевходы которых соединены с выходамисоответствующих блоков вычитания,а выходы с соответствующими входамивторых сумматоров, входы блоков вычитания подключены к одноименнымвыходам объекта управления и модели,отличающаяся тем, чтос целью повышения точности системыпутем вычисления неизвестных параметров объекта во время переходныхпроцессов, в ней выход первого сумматора и соответствующие выходыобъекта управления подключены к входу модели, а выходы вторых сумматоров соединены со вторыми входамисоответствующих первых умножителей. Источники информации,20 принятые во внимание при экспертизе1, Солодовников В, В. и др. Расчет и проектирование аналитическихсамонастраивающихся систем с эталонными моделями, М., 19 72, с. 1425 -17,2. Авторское свидетельство СССРпо заявке 9 2443151/24,кл. С 05 В 13/02, 11.01.75 (прототип),
СмотретьЗаявка
2578091, 09.02.1978
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
ПУПКОВ КОНСТАНТИН АЛЕКСАНДРОВИЧ, ПРОКОПОВ БОРИС ИВАНОВИЧ, КОПЫСОВ ОЛЕГ ЮРЬЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 05.07.1980
Код ссылки
<a href="https://patents.su/4-746415-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Цифровой измеритель низких частот

Номер патента: 408231
Опубликовано: 01.01.1973
МПК: G01R 23/10
Метки: измеритель, низких, цифровой, частот
...Такое выполнение устройства позволяет устранить методические погрешности и расширить диапазон измеряемых частот.На чертеже представлена блок-схема предлагаемого устройства.Измеритель состоит из формирователя 1 импульсов, суммирующего счетчика 2, сравнивающего устройства 3, вентиля 4, генератора 5 образцовой частоты, ключа 6, умножителя 7 двух последовательностей импульсов, дискретного фильтра 8 и вычитающего счетчи 5 ка 9.Измеритель работает следующим образом.В исходном состоянии вентиль 4 и ключ 6закрыты, суммирующий счетчик 2 и умножнтель 7 установлены в нуль, дискретный 10 фильтр 8 подготовлен к нропусканпю импульсов высокой частоты с выхода ключа 6, на вычитающем счетчике 9 установлено постоянное число Лравное удвоенному...
Аналого-цифровой интегратор
Номер патента: 732905
Опубликовано: 05.05.1980
Автор: Никулин
МПК: G06G 7/18
Метки: аналого-цифровой, интегратор
...равным сопротивлению параллельно включенных резисторов 15 и 16При переходе блока слежения-хранения 11 в режим хранения резисторы 15 и 16 отключаются от инвертирующего входа усилителя 12, а вместо них с помощью ключа 23 подключается резистор 22, имеющий одинаковую с резистором 24 величину сопротивления, Поэтому через запоминающий конденсатор 13 в режиме хранения протекает не входной ток усилителя 12, а разность его входных токов, в результате чего уменьшаются изменения напряжения на запоминающем конденсаторе за время восстановления информации и повышается точность интегратора.В режиме записи начальных условий интегратора работает следующим образом.Если после длительного нахождения интегратора в обесточенном состоянии он подключается...
Цифровой интегратор

Номер патента: 739566
Опубликовано: 05.06.1980
Авторы: Кошкин, Кузьмин, Куприянов, Шубина
МПК: G06J 1/02
Метки: интегратор, цифровой
...И 5, первый вход которого подключен к первому выходу блока итераций 4, второй выход которого подключен к управляющим входам регистра 1 подинтегральной функции и регистра 2 сдвига, выход которого подключен к его входу, а также через элемент НЕ 6 подключен к входу элемента задержки , выход которого 2 ф подключен к второму входу первого элемента И 3, входу блока итераций 4 и к второму входу второго элемента И 5, выход которого подключен к входу первого разряда регистра 2. Первый вход первого элемента И 3 подключен к выходу регистра подинтегральной функции, а выход к выходу 8 интегратора.Интегратор работает следующим образом.В исходном состоянии регистр 2 сдви- я га обнулен, а в регистре 1 подинтегральной функции записано значение...
Устройство для подсчета числа нагретых объектов

Номер патента: 897324
Опубликовано: 15.01.1982
Автор: Подуст
МПК: B21B 38/00
Метки: нагретых, объектов, подсчета, числа
...регистра соединен с первым входом схемы 12 ИЛИ и вторыми входамиблока 14 памяти. Объектив 1 визирует положение объекта 15 (прокат,заготовка).Фотоприемная. матрица 2 аналогичнаматрице в известном устройстве исостоит из идентичных ячеек, объединенных по строкам входными и по столбцам выходными шинами. В конкретномисполнении каждая ячейка матрицы состоит из фотодиода и трех МПД-транзисторов. При определении числа объектов фотоприемная матрица 2. устанавливается таким образом, чтобы ее столбгцы были расположены вдоль измеряемойширины объекта, например вдоль ширины заготовки, слитка или вдоль расположения группы объектов. Сдвиговыйрегистр 4 имеет на два разряда больше количества входных,шин фотоприем-ной матрицы 2 и предназначен для...
Самонастраивающаяся система управления
Номер патента: 1008698
Опубликовано: 30.03.1983
Авторы: Афанасьев, Пупков, Титов
МПК: G05B 13/00
Метки: самонастраивающаяся
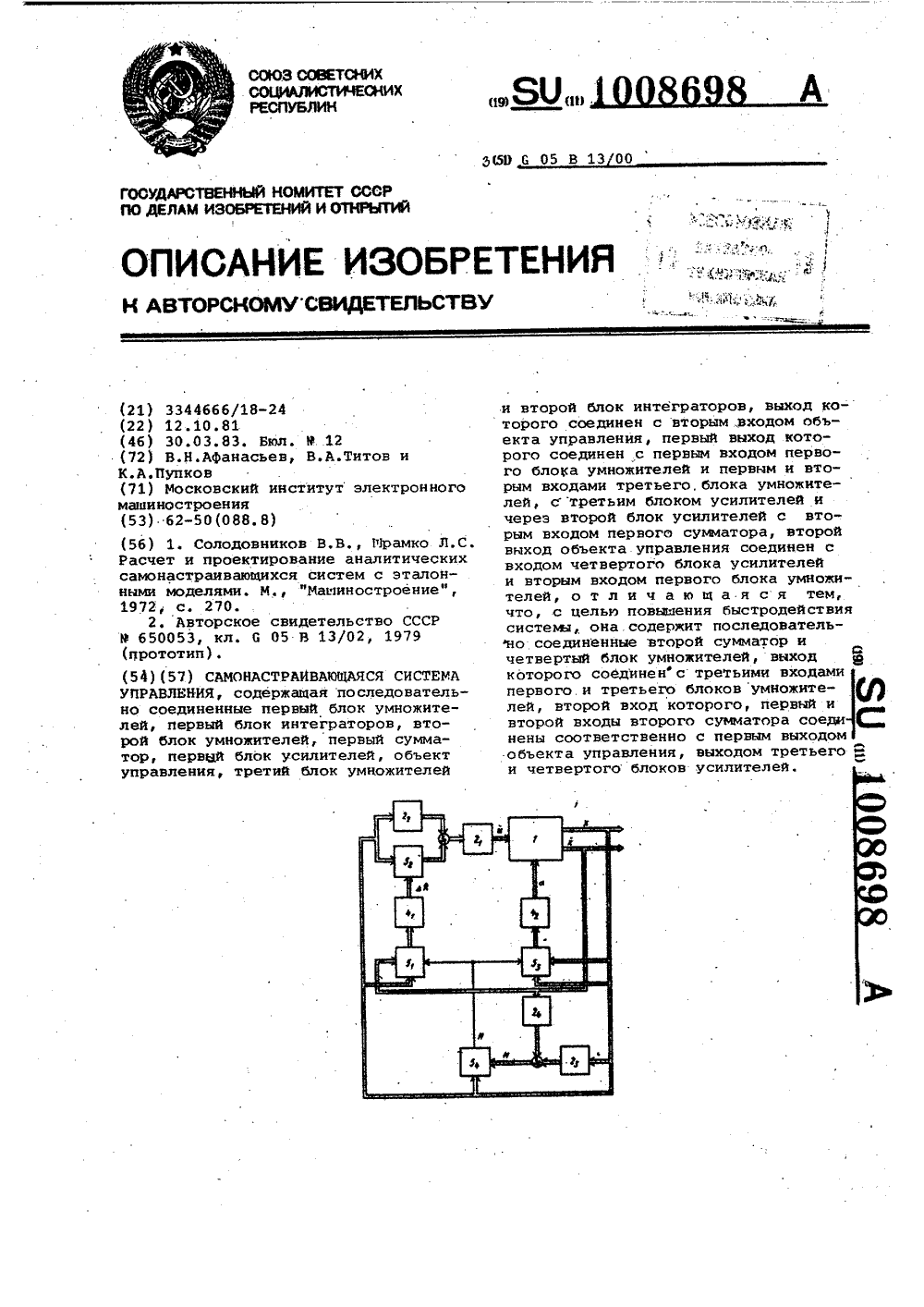
...ныходом третьего и четвертогоблоков усилителей.Блоками умножителей, интеграторов и усилителей являются параллельные соединения соответственно умножителей, интеграторов, усилителей сосвоими коэффициентами,На чертеже представлена блок-схема самонастраивающейся системы управленияНа чертеже обозначены объект 1управления, первый, второй, тре 1 ий ичетвертый блоки 2, 22, 2 и 24 усилителей, первый и второй сумматоры3 и З, первый и второй блоки 4 и4 интеграторов, первый, второй, третий и четвертый блоки 5, 5 у, 5 и54 умножителей, первая и вторая выходные координаты х и х объекта управления, выходные сигналы И, 0 второго сумматора 3 и первого блока 2усилителей, выходной сигнал Н четвертого блока 54 умножителей, выходныесигналы д 1, Ж...
Предыдущий патент: Адаптивный регулятор
Следующий патент: Регулятор
Случайный патент: Устройство для управления затвором промывных шлюзов ирригационных отстойников