Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
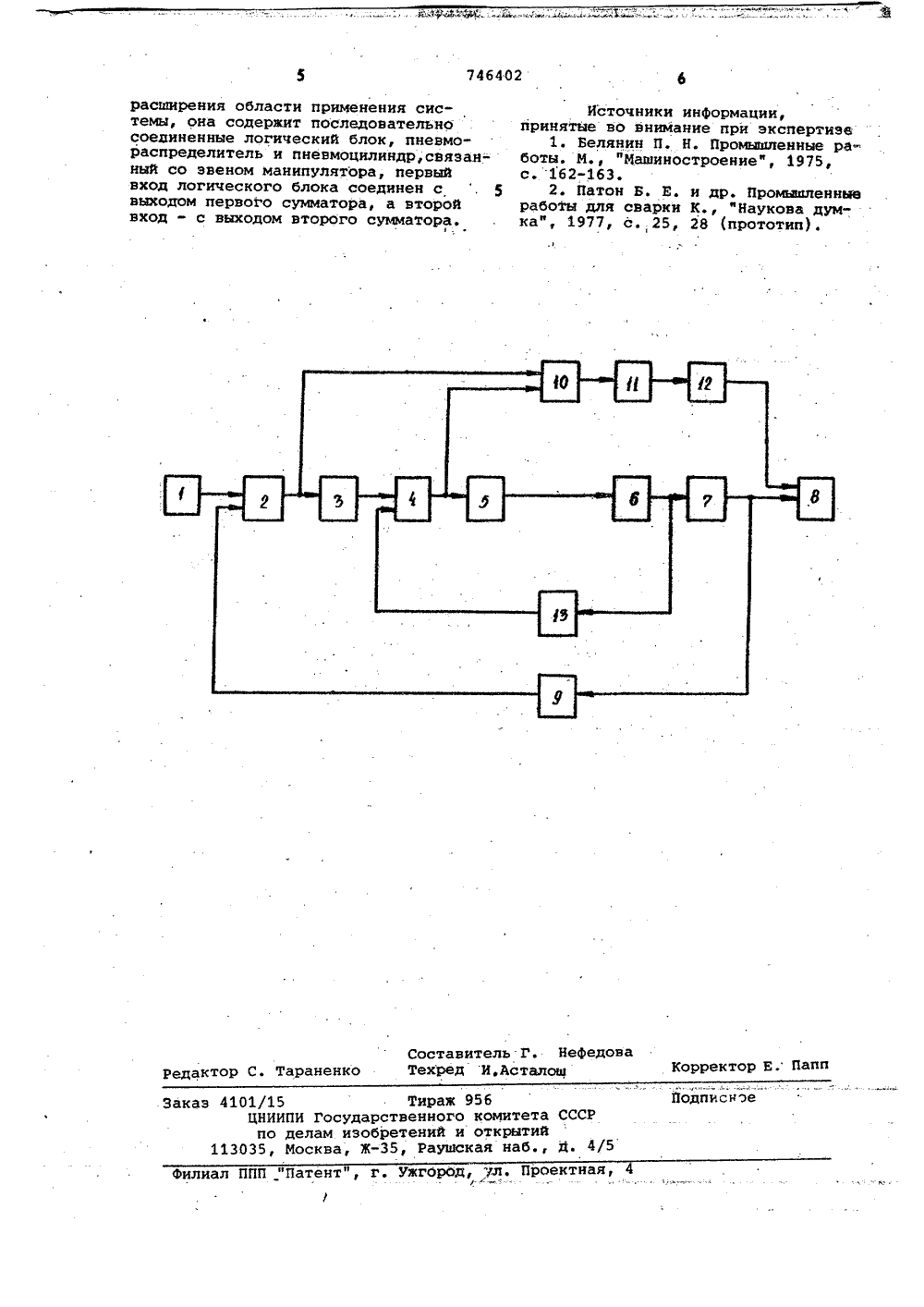
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских СОцналистичесннх Республнк(22) Заявлено 250478 (21) 2607510/18-24 с присоединением заявки МО С 05 В 11/00 В 25 3 13/00 Государственный комитет СССР оо делам изобретений и открытийДата опубликования описания 070780(72) Авторы изобретения В. А. Королев, С. Ю. Белов и С. М. Сергеев Особое конструкторское бюро технической кибернетикиОрдена Ленина Ленинградского политехническогоинстит та имени М И Калинина(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ Изобретение относится к робототехнике и может быть использовано при создании систем управления манипулятором с комбинированным приво дом.Известны системы управления манИ- пулятором, содержащие по каждой регулируемой координате эадатчик управляющего сигнала, сумматор, усилитель, пневмопривод.и датчик положения 113 .Однако эти системы имеют плохие регулировочные характеристики.Наиболее близким техническим ре шением к изобретению является система, содержащая последовательно соединенные задатчик управляющего сигнала, первый сумматор, первый усилитель, второй сумматор, второй 20 усилитель и электродвигатель, связанный с датчиком скорости и через редуктор -со звеном манипулятора и датчиком перемещения, выход которого соединен со вторым входом пер вого сумматора, выход датчика скорости подключен ко второму ходу второго сумматора. Эта система имеет высокие регулировочные характеристики 2130 Недостатком этой системы являетсянизкая удельная мощность.Целью изобретения является расширение области применения системы.Поставленная цель достигаетсятем, что система содержит последовательно соединенные логический блок,пневмораспределитель и пневмоцилиндр,связанный со звеном манипулятора,первый вход логического блока соединен с выходом первого сумматора, авторой вход - с выходом второгосумматора.На чертеже представлена функциональная схема системы,Система упоавления манипуляторасодержит задатчик 1 управляющегосигнала, первый сумматор 2, первыйусилитель 3, второй сумматор 4, второй усилитель 5, электродвигатель 6,редуктор 7, звено 8 манипуляторадатчик 9 перемещения, логический блок10, пневмораспределитель 11, пневйоцилиндр 12, датчик 13 скорости.Система работает следующим образом.. Командный: сигнал, поступающий сблока управляющего сигнала, и сигнал датчика 9 перемещения, вычитаясьФормула изобретенияв первом сумматоре 2, образуют сигнал рассогласования.по положению, который, пройдя первый усилитель 3 сигнала рассогласования по положению, поступает на вход второго сумматора 4,где из него вычитается поступающийтуда же сигнал от датчика 13 скорости и образуется сигнал рассогласования по скорости, который, пройдя второй усилитель 5 сигнала рассогласования по скорости, поступает на вход электродвигателя б, который начинаетвращаться и через редуктор 7 приводит в движение звено 8 манипулятора.Одновременно сигнал рассогласованияпо положению с выхода первого сумматора 2 и сигнал рассогласования поскорости с выхода второго сумматора 4 поступают на входы логического блока 10, который в соответствии со знакматмй, йоступающих на его входы сигналов выделяет режимы торможения и рабочих перемещений и вырабатыва"ет соответствующие фиксировайнМе" ситнелн. Пневморнспределнтель 11 соединяет ренские йолости"йневмот цилиндра 12 с магистралью и атмосферой в соответствии с сигналами навйходе.логического блока 10 и пневмоцилиндр 12 начинает разгонятьсявзадайнбм направлении, приводя вдвижение звено 8 манипулятора, При превышений электродвигателем б (звеном 8 манипулятора) скорости, соответствующей сигналу, поступающемуот первого усилителя 3 сигнала рассогласования по положению, сигнал рассогласования скорости меняет свой знак, логический блок 10 вырабатывает сигнал торможения, Логика управления пневмораспределителем,11 в режиме торможения опреде- ляется требуемыми динамическими качествами системы привода и может быть, например такой, когда пневмо, распределитель 11 в режиме торможения соединяет с магистралью обе "по- лости пневмоцилиндра 12, который начинает тормозиться. Одновременно начинает тормозиться электродвигатель б, вследствие изменения знака выход- ного сигнала втбролго усилителя 5. Торможение, продолжается до тех пор, дока сигнал рассогласования по скорости вновь не поменяет своего знака вследствие снижений скорости ниже заданной. Таким образом обеспечрва 6 тся отработка системой заданнойскорости,Аналогичным образом система перейдет в режим торможения при изме йбяии знака сигнала" рассогласова- йия "по скорости вследствие уменьшеййй-веййчииы сйгиайа рассогларсло- . вания по положению. В этом случае тор"моженйе происходит до тех пор, пока " скорость нй уменьшится до величийй соответствующей йовому"эиачеийю"сигнала рассогласования по положению(в частном случае до нуля). Такимобразом обеспечивается отработкасистемой заданного перемещения.При реверсе привода изменитсвой знак сигнал рассогласованияпо положению вследствие изменениязнака входного командного сигнала,поступающего с задатчика 1 управляющего сигнала, и следовательно, изменит свой знак сигнал рассогласования по скорости, логический блок10 выдает соответствующий сигнална пневмораспределитель 11, который соединит полости пневмоцилиндра12 с атмосферой имагистралью противоположным образом, вследствие чего 355 пневмоцилиндр 12 сначала затормозится, а затем начнет разгон в противоположную сторонуСоотношение номйнальных мощнос- .тей пневмоцилиндра и электродвига" 20 теля лежит в пределах (10-15)/ 1 присоотношении максимальных развиваемых усилий в переходных режимах 2-3/1,что обусловлено возможностью электро двигателей многократно превышать ноцминальный движущий момент в режимах пуска и торможения. При пуске привода электродвигатель развивает максимальный движущий момент, который по мере нарастания движущего усилия пневмоцилиндра и увеличения скорости постепенно спадает до величины, обусловленной откло-,нением скорости от заданной величины и при движении привода со скоростью,близкой к заданной, электродвигательоказывается практически разгруженным,т. е. в предлагаемом приводе основнуюэнергетическую нагрузку несет пневмоцилиндр, а электродвигатель вырабатывает кратковременные силовые40 воздействия при пусках и торможениях привода, что улучшает динамику системы и исключает влияние флуктуации величины силы трения уплотнений пневмоцилиндра на процесс точного позиционирования.Применение изобретения позволит в диапазоне приводных мощностей до 1,5 кВт повысить удельную мощность привода системы управления манипуля-. тора в 2-5 раэ,Система управления манипулятором,содержащая последовательно соединенные задатчик управляющего сигнала, первый сумматор, первый усилитель, второй сумматор, второй усилитель и электродвигатель, связанный с датчиком скорости и через редукторщ со звеном манипулятора и датчиком.перемещения, выход которого соединен со вторым входом первого сумматора, выход датчика скорости подключен ко второму входу сумматора, о т л ич а ю щ а я с я тем, что с целью746402 расширения области применения системы, она содержит последовательно соединенные логический блок, пневмораспределитель и пневмоцилиндр,связанный со звеном манипулятора, первый вход логического блока соединен с . 5 выходом первого сумматора, а второй вход - с выходом второго сумматора.1:Составитель Г. Нефедов Техред И,Асталош ап орректо актор С. Тараненко Подписнэе Тираж 956рственного комитета СССРбретений и открытийфилиал ППП "Патент" аказ 4101/15 ЦНИИПИ Госуд по делам из 113035, Москва, Источники информации,принятые во внимание при экспертизе1. Белянин П. Н. Промышленные работы. М., "Иашиностроениеф, 1975,с. 162-163.2. Патон Б. Е. и др. Промышленныеработы для сварки Е., "Наукова думкаф, 1977, с. 25, 28 (прототип).
СмотретьЗаявка
2607510, 25.04.1978
ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ ОРДЕНА ЛЕНИНА ЛЕНИНГРАДСКОГО ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА ИМ. М. И. КАЛИНИНА
КОРОЛЕВ ВЛАДИМИР АЛЕКСАНДРОВИЧ, БЕЛОВ СЕРГЕЙ ЮРЬЕВИЧ, СЕРГЕЕВ СЕРГЕЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: манипулятором
Опубликовано: 05.07.1980
Код ссылки
<a href="https://patents.su/3-746402-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Устройство для измерения скорости изменения сигнала

Номер патента: 1575312
Опубликовано: 30.06.1990
МПК: H03M 1/52
Метки: изменения, сигнала, скорости
...напряжение, при этом на выходе усилителя 5 относительных приращений устанавливается небольшой отрицательный потенциал, двухпороговый компаратор 7 возврашается в исходное состояние и заканчивается первый цикл измерений. В моментпосле того, как закончились переходные процессы в усилителе 5 относительных прираще5 " 15753 ний, по сигналу "Управ.1" начинается, следующий цикл измерений, Процесс измерения временных интервалов продолжается до тех пор, пока не будет най" дено минимальное значение временного5 интервала Ь й,янТаким образом, процесс измерения сводится к измерению временных интервалов, пропорциональных скорости изменения фиксированного перепада входного сигнала. Величина этого перепада формируется опорными напряжениями Б , и П...
Система оптимального управленияобектами второго порядка

Номер патента: 805250
Опубликовано: 15.02.1981
Автор: Синеглазов
МПК: G05B 13/04
Метки: второго, оптимального, порядка, управленияобектами
...Х(1) блок 17 начальных уставок производит выбор значения управЗр ления на начальном участке движения объекта 16, что обеспечиваетсяначальной установкой триггера 9. Приэтом триггер 10 переводится в то же. состояние, что и триггер 9, а логический блок 11 "Эквивалентность"выдает сигнал "1" на вход блока 8управления первой моделью. Это вызывает, с одной стороны, переводмодели 4 в режим периодического решения, а с другой стороны выдачу 40 управления Оо= -51 ДИ Х на входыобъекта 16, второй модели 5 и функционального преобразователя 13, координатного преобразователя 20. Выходные сигналы объекта 16 и модели 4 5 поступают. на входы сумматора 2 тель подключен ко второму входу первого сумматора, второй вход - к первому выхоцу первого триггера, а...
Следящая система с ограниченным углом поворота выходного вала

Номер патента: 1783469
Опубликовано: 23.12.1992
Автор: Ледерер
МПК: G05B 11/01
Метки: вала, выходного, ограниченным, поворота, следящая, углом
...напряжение поступает на первый вход формирователя 9 сигнала управления, на второй вход которого подается напряжение с выхода схемы сравнения 5, пропорциональный фактической скорости вращения электродвигателя 1, С выхода формирователя 9 сигнала управления напряжение, пропор. циональное разности между заданной и фактической скоростями вращения ротора электродвигателя 1, подается через усилитель 8 мощности и масштабирующий резистор 6 на обмотку электродвигателя 1, Ротор электродвигателя 1 на пинает вращаться и перемещает нагрузку 2, Вращение ротора происходит до тех пор, пока нагрузка 2 йе встанет в положение, определяемое задатчиком 11, Как только нагрузка 2 встанет в требуемое положение, обмотка электродвигателя 1 обесточивается,...
Бинарная система управления

Номер патента: 1837254
Опубликовано: 30.08.1993
Авторы: Ахтырский, Емельянов, Коровин, Сизиков, Цветкова
МПК: G05B 13/00
Метки: бинарная
...соответствующим образом параметр д всегда гарантируется требуемая близость начальных условий на объекте и эталонной модели,Еще одной важной особенностью предлагаемой системы является то, что функциональные блоки 18118 п в процессе работы легко могут быть перенастроены на новые динамические свойства без перена 40 стройки всей системы. Остальные контуры предлагаемой системы построены так, чтобы обеспечить асимптотическое стремление управляемых процессовх(т) к эталонным траекториям 5(1) или выполнению равенства 1 и 11 х(т)3(1) 11=-0,где х(т)=(х(т)х (1 ЯКПредложенный регулятор описываетсяследующими соотношениямиО(с)= р Я (К" х((К)ЯС),=1 где (.)(т) и р(т) - выходные сигналы первого умножителя 8 и инерционного фильтра 16, соответственно; а...
Устройство для контроля передачи информации

Номер патента: 894778
Опубликовано: 30.12.1981
Автор: Хельвас
МПК: G08C 25/00
Метки: информации, передачи
...приведена блок-схема устройства для контроля канала передачи информации,Устройство содержит блок 1 передачи ин.формации, блок 2 поиема информации, блоки3 ретрансляции, каждый из которых содержитпервый усилитель 4, третий усилитель 5, сумматор 6, второй усилитель 7, блок 8 сравнения кодов, элемент ИЛИ 9, триггер 10 управления, шифратор 11.Сумматор 6 осуществляет суммированиепо модулю два.щ 0 Устройство работает следующим образом,Код информации с выхода блока 1 пере.дачи инФормации передается на вход блока 2 приема информации через первые усилители 4,входящие в состав блоков 3 ретрансляции, 25 По всей линии передачи код информации со.провождает контрольный разряд, В каждом блоке 3 ретрансляции код инФормации с вы.хода первого усилителя...
Предыдущий патент: Способ компенсации инерционности систем автоматического управления и регулирования
Следующий патент: Привод подвижного зеркала интерферометра
Случайный патент: Устройство для автоматического управления дозированием реагентов