Способ компенсации инерционности систем автоматического управления и регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
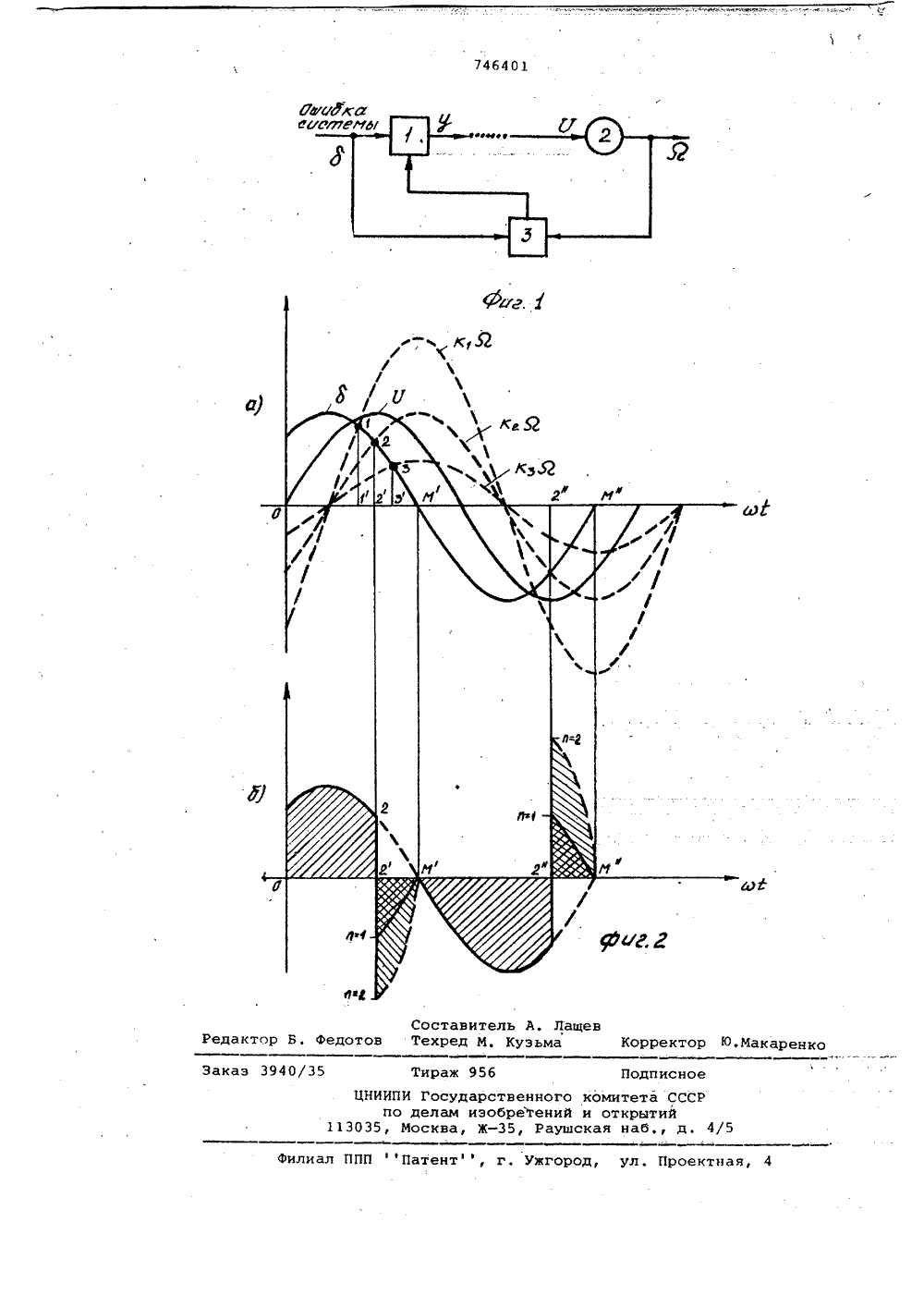
И САН ИЕ О П Союз Советских Социалистических Республик(22) Заявлено 110374 (21) 2004300/18-24 1 с присоединением заявки Мо Государствеииый комитет СССР ио делам изобретеиий и открцтий(54) СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ. - .Щ а;=д 6, .й+ЬмЙЮЮййЫ 1Предлагаемое изобретение относится к системам автоматического управления и регулирования, в которых как правилб, содержатся звенья, обладаюцие инерционностью. 5Известен способ компенсации инер- ционности двигателя, который состоит в том, что путем сравнения знаков напряжения управления двигателя с напряжением, пропорциональнымскорости 10 врацения двигателя, выявляют те интервалы времени, на которых знаки сигналов не совпадают, формируют .корректируюций сигнал, сдвигают его на четверть периода собственных колебаний 15 системы и подают на звено, разрываюцее на время действия корректируюцего сигнала цепь основного управляюцего сигнала (1)20 Недостаток известного способа малая точность компенсации инерционности,Наиболее близким техническим решением является способ компенсации25 инерционности систем; автоматического управления и регулирования, основанный на формировании сигнала регулирования. сигнала скорости регулируемого сигнала и сигнала ошибки системы 2). 30 алая точность компенсации инерционности - недостаток известного способа.Цель изобретения - повышение точности компенсации инерционности, которая достигается тем, что определяют знак сигнала разности сигнала ошибки и сигнала скорости регулируемого сигнала и изменяют знак сигнала регулирования при несовпадении его со знаком сигнала разности.Нафиг. 1 изображена структурная электрическая схема для реализации предлагаемого способа; на фиг. 2 представлены кривые сигналов.На вход ключевого устройства 1 подают сигнал ошибки или сигнал рассогласования системи. Выход ключевого устройства можно соединятьс любыми звеньями систевы, либо, если они.отсутствуют, с двигателем 2. Напряжение Я, пропорциональное скорости двигателя, подают на вход логического устройства 3, Сюда же подают сигнал ошибкиВыход логического устройства соединен сключевым устройством.Компенсация инерционностей происходит следуюцим образом,На логическое устройство 3, анализирующее знаки и величины посту"дающихсигналов, подают напряжениеошибки Р и напряжение Й , пропорциональное скорости вращения двигателя,например, с тахогенератора или смостовой схемы. В качестве логического устройства могут быть использонаны самые различные схеьк, например,схемы совпадения. С помощью логического устройства производят сравнениепоступающих сигналов по следующемузакону: Ч=д ъ,и (д-кя,18)0Ч=-Ьд ЪР (д-КЯ)8 сО,где у - основной сигнал упранлениясистемы на выходе ключевогод -элемента ЗТсигнал ошибки системтТЙ - напряжение, пропорциональноескорости двигателя;К - коэффициент пропорциональности;п - коэффициент, принимающий численные значения и 11.В те моменты времени, когда выполняется условие (1), с помощью ключевого элемента 3 пропускают основнойсигнал управления без изменения. Вте интервалы времени, когда выполняется условие (2), с помощью ключевогоэлемента изменяют знак основного сиг" =нала. Одйовременно (в зависимости отвеличины и) можно изменять амплитудуперекидываемого сигнала (как правилоп 1)Иэнестйо, что прй изменении знакауправляющего сигнала, по сраннению сотключением этого сигнала, достигаютболее эффективной стабилизации системы в переходных режимах. Еще больший;изменения знака управляющего сигналас одновременным увеличением амплитуды последнего.Предлагаемый способ позволяет также получать эффект упреждения," и втех случаях, когда это необходимо полностью компенсировать отрицательноевлияние инерционностей двигателя идругих звеньев путем соответствующеговыбора коэффициентов К и и,Из фиг. 2 а следует, что при трехразличных амплитудах КЯ. получаютразные интервалы времени работы ключевого устройства 1 (фиг. 1). Например, при амплитуде напряжения К(2до точки 2 выполняется условие (1).Следовательно, на интервале времени0-2 основной сигнал знака не меняетй. 1(Фиг. 2 б). Начиная с точки 2 до точки М выполняется условие (2), поэтоТ му ключевое устройство изменяет знакосновного сигнала, В интервале време 1 Вни М -2 опять становится справедливым условие (1) - сигнал сохраняетсвой знак; на отрезке времени 2" -Мдействует условие (2) - знак сигналаизменяется и т, д.Как следует из вышеописанного,предлагаемый способ:1) не требует дополнительного изменения фазового сднига на четвертьпериода собственных колебаний системы и вследствие этого не критичен к,изменениям частоты колебаний систе-мыТ52) не требует большого перерегулиронания системы, так как уже в первый полупериод процесса (отрезок вре 1мени (2-М фиг. 2 б) начинает работатьключевой элемент 1 фиг, 2;3) позволяет компенсировать инер ционность не только двигателей, но илюбых других звеньев" между входом системы и устройством, вырабатывающимнапряжение, пропорциональное скорости двигателя;д 5 4) эффективен при различных видахвходного сигнала.Экспериментальные данные показы вают, что применение предлагаемогоспособа при соответствующем подборекоэффициентов и и К позволяет компенсировать влияние всех инерционныхзвеньев системы и тем саьым получитьоптимальный переходный процесс иуменьшить значение ошибки н системе.35Формула изобретенияСпособ компенсации инерционностисистем автоматического управления ирегулирования, основанный на формйро"вании сигнала регулирования, сигналаскорости, регулируемого сигнала и сигнала ошибки сйстемы, о т л и ч а ющ и й с я тем, что, с целью повыше"45 ния точности компенсации нелинейнос 1тей, определяют знак сигнала разности регулируемого сигнала и изменяютзнак сигнала регулирования при несовпадении его со знаком сигнала раз 50 ности.Источники информации,принятые во внимание при экспертизе1, Санконский Е.Л. и др. Основыавтоматического упранления, МВИЗРУ,55 ПВО, Минск, 1968, кн. 2, с. 235.2. Хлынало Е. И. Нелинейные системы автоматического регулирования.фЭнергия" ,67, с, 403-411 (прототип) .дактор Б. Фе орректор Ю,Макаренко Заказ 3940/35 аж 95 одписное ЦНИИПИ Государственного комитета СС по делам изобретений и открытий13035, Москва, Ж, Раушская наб д Филиал ППП фПатент, г. Ужгород, ул. Проектная,
СмотретьЗаявка
2004300, 11.03.1974
ПРЕДПРИЯТИЕ ПЯ Г-4172
РУБАХИН РОСТИСЛАВ АЛЕКСЕЕВИЧ, БОГДАНОВА ГАЛИНА СЕРАФИМОВНА, ОКУНЬ ЛАРИСА ПАВЛОВНА
МПК / Метки
МПК: G05B 11/00
Метки: инерционности, компенсации, систем
Опубликовано: 05.07.1980
Код ссылки
<a href="https://patents.su/3-746401-sposob-kompensacii-inercionnosti-sistem-avtomaticheskogo-upravleniya-i-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ компенсации инерционности систем автоматического управления и регулирования</a>
Устройство для формирования сигнала обратной связи системы управления гидроагрегатом

Номер патента: 947821
Опубликовано: 30.07.1982
Авторы: Башнин, Давидсон, Родионов, Семенов, Федоров, Щеголев
МПК: G05B 11/01
Метки: гидроагрегатом, обратной, связи, сигнала, системы, формирования
...сигнала по высокочастотному входу лежит в пре- делаМ 0,7-1, т.е. эти частоты принадлежат полосе пропускания высокочастотного входа. Этот согласованный фильтр используется для замены в области высоких частот сигнала фактической активной мощности, имеющего большие динамические погрешности, сиг налом прогнозируемой активной мощности, .Формируемьак беэынерционно в функции от открытия и напора.Блок 11 моделирования гидравлйческого удара в общем случае пред ставляет нелинейный фильтр высокой частоты, передаточная функция которого определяется из следующих соображенийПри жесткой связи генератора с 10 системой регулирования электрическая мощность, отдаваемая в сеть при перемещении регулирующего органа, совпадает численно с моментом,...
Устройство для компенсации фоновых составляющих телевизионного сигнала

Номер патента: 1288935
Опубликовано: 07.02.1987
Авторы: Константинов, Николаев
МПК: H04N 5/14
Метки: компенсации, сигнала, составляющих, телевизионного, фоновых
...выхода селектора 7 сигнал ошибки компенса ции фона тем ного пол я Б- (фи г. 2 г) поступает на вход АЦП 8, пос- чего в виде М-разрядного двоичного кода через второй коммутатор 6, включенный в соответствии с внешним сигналом коммутации, поданным на его управляющий вход, поступает на вход блока 11 памяти первого канала 9 запоминания, в котором осуществляется его запоминание в соответствии с сигналом разрешения, поступающим на управляющий вход С выхода этого блока1 памяти сигна". ошибки компенсации фона темного поля через ЦАП 12 поступает на вход фильтра 13 25 нижних частот, в котором осугцествляетсяего сглаживание. С выхода фильтра 13 нижних частот первого канала 9 запоминания восстановленный в аналогов ю форму сигнал ошибки...
Устройство для автоматического выделения сигнала “перебой” в системах симплексной телеграфной связи

Номер патента: 498753
Опубликовано: 05.01.1976
МПК: H04L 11/08
Метки: выделения, перебой, связи, сигнала, симплексной, системах, телеграфной
...к блоку формирования оди.ночного импульса 3, который соединен с кноп кой 4. Обмотка считывания 5 трансформатора1 подключена к стартовому выходу 6 входного устройства приемника телеграфного кода 7, Выходная обмотка 8 трансформатора 1 подключена к одному входу выходного блока 9 20 передатчика 10, а другой вход блока 9,подключен к цепи 11 разблокировки передатчика 10 приемником 7 после окончания приема комбинации из линии связи 12, и к передатчику 10.25 Устройство работает следующим образом.При нажатии на кнопку 4 срабатывает блокформирования одиночного импульса 3, и сигнал с его выхода поступает на обмотку записи 2 тр ансформатора 1. Так осуществляется 31 запись сигнала перебой в трансформатор 1.498753 тавитель В. Чичкин Техред М....
Устройство для автоматической компенсации неравномерности фона телевизионного сигнала

Номер патента: 1723672
Опубликовано: 30.03.1992
Авторы: Уваров, Хитрово, Чернышов
МПК: H04N 5/235
Метки: автоматической, компенсации, неравномерности, сигнала, телевизионного, фона
...генератор 17 может быть выполнен аналогично формирователям 14 - 16 с быстродействующими ЦАП и с фильтром нижних частот, подавляющим шумы коммутации ЦАП в строчном направлении, в котором необходимо использовать не менее 100 отсчетов. Следовательно, на управляющий вход формирователя 14 необходимо подать 9-разрядный двоична-взвешенный сигнал с частотой 8 МГц,Несколько проще вариант (фиг. 3), где формирователь параболического напряжения построен на интеграторах со сбросом гасящим импульсом в каждой строке, четвертый 38, пятый 40 и шестой 43 резисторы, по существу являются суммирующими резисторами алгебраического сумматора 1, коэффициенты передачи по обоим входам которого равны 1, Для исключения постоянной составляющей на выходе...
Устройство для выключения двигателя и подачи сигнала при чрезмерном нагреве подшипника

Номер патента: 11911
Опубликовано: 30.09.1929
Автор: Соловьев
МПК: F16C 17/00, G08B 23/00
Метки: выключения, двигателя, нагреве, подачи, подшипника, сигнала, чрезмерном
...прп своем перемещении, выключать двигатель путем соответствующих приспособлений и подавать сигнал при чрезмерном нагреве подшипника, при котором происходит выплавление легкоплавкого сплава, открытие отверстия 4, выпуск сжатого воздуха из трубки 3 и цилиндра 4 и опускание поршня 5, влекущее за собою вышеупомянутое перемещение кулака 7. атенту И, И, Соловьева. заВ предлагаемом устройстве, предназняченном для выключеняя двигателя и подачи сигнала прп чрезмерном нагреве подшипника, применена закрытая с одного конца трубка, вставленная между телом подшипника и вкладышем н сообщающаяся другим концом с цплпндром, в котором находнтся сжатый поршнем воздух; в стенке трубки имеется отверстие, запаиваемое легкоплавким сплавом,...
Предыдущий патент: Фильтр для систем автоматического регулирования
Следующий патент: Система управления манипулятором
Случайный патент: Колонная головка