Устройство для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
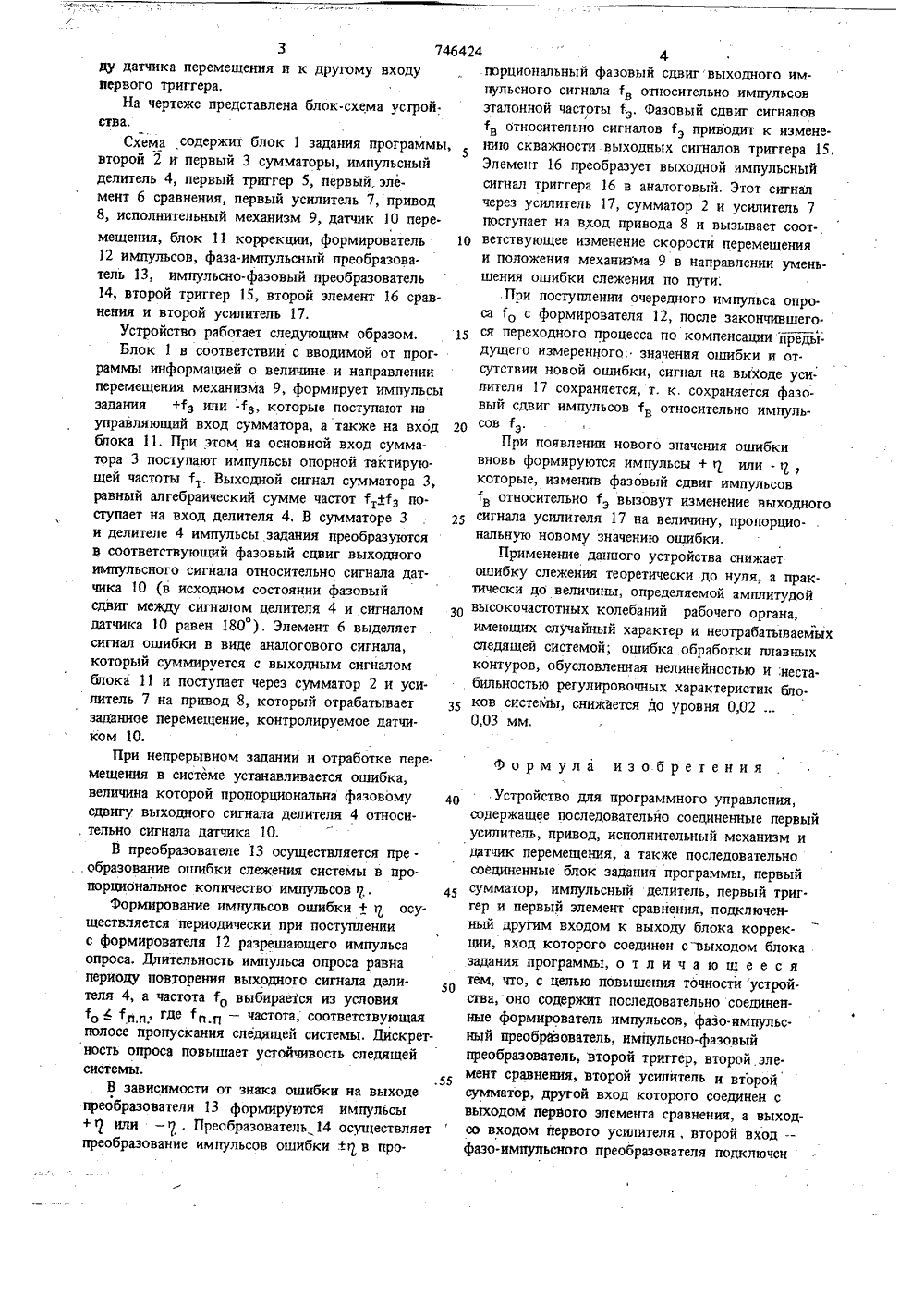
Союз СоеетсиихСоциалистмчеекихРеспублик ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К . АВТОРСКОМУ СВИДЕТИТЬСТВУ в 746424(22) Заявлено 13,04.78 (21) 2605200/18-24с присоединением заявки Рйпо делам изобретений и аткрытий(71) Заявитель Ульяновское головное специальное конструкторскоебюро тяжелых и фрезерных станков(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления и предназначено для компенсации ошибок слежения при отработке постоянного и медленно изменяющегося входного воздействия и может быть использовано,5 например, в металлорежущих станках с числовым программным управлением.Известно устройство для программного управления, состоящее из последовательно соето диненных блока ввода программы, интерполятора и исполнительного органа 131Наиболее близким техническим решением к данному изобретению является устройство для программного управления, содержащее15 последовательно соединеннъте первый усилитель, привод, исполнительный механизм и датчик перемещения, а также последовательно соединенные блок задания программы, первый сумматор, импульсный делитель, первый триггер и первый элемент сравнения, подключенный другим входом к выходу блока коррекции, вход которого соединен с выходом блока задания программ 12) ./ Недостатком известных устройств является . наличие ошибок слежения при отработке посто. янного и медленно изменяющегося входного воздействия, обусловленных нелинейностью и нестабильностью регулировочных характеристик блоков.Цель изобретения - повышение точности устройства путем уменьшения, ошибок слежения при отработке постоянного и медленно изменяющегося входного воздействия, обусловленных нелинейностью и нестабильностью регулировочных характеристик блоков системы,Поставленная цель достигается тем, что устройство содержит последовательно соединен. ные формирователь импульсов, фазоимпульсный преобразователь, импульсно-фазовый преобразователь, второй триггер, второй элемент сравнения, второй усилитель и второй сумматор, другой вход которого соединен с выходомэпервого элемента сравнения, а выход - со вхо. дом первого усилителя, второй вход фазоимпуль. сного преобразователя подключен к выходу ,импульсного делителя,а третий вход - к выхо.746424 ду датчика перемещения и к друтому входупервого триггера,На чертеже представлена блок-схема устрой.ства,Схема содержит блок 1 задания программы,второй 2 н первый 3 сумматоры, импульсныйделитель 4, первый триггер 5, первый, элемент 6 сравнения, первый усилитель 7, привод8, исполнительный механизм 9, датчик 10 пере.мещения, блок 11 коррекции, формирователь 1012 импульсов, фаза-импульсный преобразователь 13, импульсно-фазовый преобразователь14, второй триггер 15, второй элемент 16 срав.нения и второй усилитель 17.Устройство работает следующим образом, 15Блок 1 в соответствии с вводимой от программы информацией о величине и направленииперемещения механизма 9, формирует импульсызадания +1 з или -1 з, которые поступают науправляющий вход сумматора, а также на вход 20блока 11. При этом на основной вход сумматора 3 поступают импульсы опорной тактирующей частоты 1 . Выходной сигнал сумматора 3,равный алгебраический сумме частот 1 Из поступает на вход делителя 4, В сумматоре 3 . 25и делителе 4 импульсы задания преобразуютсяв соответствующий фазовый сдвиг выходногоимпульсного сигнала относительно сигнала датчика 10 в исходном состоянии фазовыйсдвиг между сигналом делителя 4 и сигналом з 0датчика 10 равен 180). Элемент 6 выделяетсигнал ошибки в виде аналогового сигнала,который суммируется с выходным сигналомблока 11 и поступает через сумматор 2 и усилитель 7 на привод 8, который отрабатывает з 5заданное перемещение, контролируемое датчи.ком 10.При непрерывном задании и отработке перемещения в системе устанавливается ошибка,величина которой пропорциональна фазовому 40сдвигу выходного сигнала делителя 4 относи, тельно сигнала датчика 10,В преобразователе 13 осуществляется преобразование ошибки слежения системы в про.порционэльное количество импульсов и,. 45Формирование импульсов ошибки + и осуществляется периодически при поступлениис формирователя 12 разрешающего импульсаопроса, Длительность импульса опроса равнапериоду повторения выходного сигнала делителя 4, а частота 1 о выбирается из условия1 о с 1 п и, где 1 п и - частота, соответствующаяполосе пропускания следящей системы. Дискретность опроса повышает устойчивость следящейсистемы,В зависимости от знака ошибки на выходепреобразователя 13 формируются импульсы+или - 7 . Преобразователь 14 осуществляетпреобразование импульсов ошибки +и в про 4порционапьный фазовый сдвиг выходного импульсного сигнала 1 в относительно импульсовэталонной частоты э. Фазовый сдвиг сигналов1 в относительно сигналов 1 приводит к изменению скважности выходных сигналов триггера 15,Элемент 16 преобразует выходной импульсныйсигнал триггера 16 в аналоговый, Этот сигналчерез усилитель 17, сумматор 2 и усилитель 7поступает на вход привода 8 и вызывает соответствующее изменение скорости перемещенияи положения механизма 9 в направлении уменьшения ошибки слежения по пути;При поступлении очередного импульса опроса 1 о с формирователя 12, после закончившего.ся переходного процесса по компенсации предыдущего измеренного. значения ошибки и от.сутствии новой ошибки, сигнал на выХоде усилителя 17 сохраняется, т. к, сохраняется фазовый сдвиг импульсов 1 в относительно импульсов з.При появлении нового значения ошибкивновь формируются импульсы +или - ,которые, изменив фазовый сдвиг импульсовТв относительно 1 вызовут изменение выходногосигнала усилителя 17 на величину, пропорциональную новому значению ошибки.Применение данного устройства снижаетошибку слежения теоретически до нуля, а практически до величины, определяемой амплитудойвысокочастотных колебаний рабочего органа,имеющих случайный характер и неотрабатываемыхследящей системой; ошибка обработки плавныхконтуров, обусловленная нелинейностью и:неста.бильностью регулировочных характеристик блоков системы, снижается до уровня 0,020,03 мм,Формула изобретения Устройство для программного управления, содержащее последовательйо соединенные первый усилитель, привод, исполнительный механизм и датчик перемещения, а также последовательно соединенные блок задания программы, первый сумматор, импульсный делитель, первый триггер и первый элемент сравнения, подключенный другим входом к выходу блока коррекции, вход которого соединен с выходом блока задания программы, о т л и ч а ю щ е е с я тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные формирователь импульсов, фазо.импульсный преобразователь, импульсно-фазовый преобразователь, Второй триггер, второй элемент сравнения, второй усилитель и второй сумматор, другой вход которого соединен с выходом первого элемента сравнения, а выходсо входом первого усилителя, второй вход - фазо-импульсного преобразователя подключеноставитель И, Колокольехред И.Асталошктор И. Муск едактор И. Коваль Тираж 956 ЦНИИПИ Государственного комитета по делам изобретений и открытий 13035, Москва, Ж, Раушская наб., аказ 4102/1 о сн д Филиал ППП "Патент", г ород, ул, П 5к выходу импульсного делителя, а третийвход - к выходу датчика перемещения и кдругому входу первого триггера,Источники информации,принятые во внимание при экспертизе 74 б 424 61. Авторское свидетельство СССР Мф 455325,кп. 6 05 В 19/18, 1974.2, Тихомиров Э. Л. и др. Система числово.го управления и перспективы их развития. М
СмотретьЗаявка
2605200, 13.04.1978
УЛЬЯНОВСКОЕ ГОЛОВНОЕ СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО ТЯЖЕЛЫХ И ФРЕЗЕРНЫХ СТАНКОВ
КОВАЛЬ МИХАИЛ ИВАНОВИЧ, ИГОНИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 19/16
Метки: программного
Опубликовано: 05.07.1980
Код ссылки
<a href="https://patents.su/3-746424-ustrojjstvo-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления</a>
Анализатор частотно-фазовых соотношений двух импульсных последовательностей

Номер патента: 894849
Опубликовано: 30.12.1981
Автор: Столяров
МПК: H03K 5/18
Метки: анализатор, двух, импульсных, последовательностей, соотношений, частотно-фазовых
...отсутствуют, так как разностьвходных частот равна нулю, что сигнализирует о равенстве входных частот.Для сигнализации о моменте равенства фаз .последовательностей импульсов с равными входными частота 35ми Г,1Г, подаваемыми на входы 1и 2 анализатора, используется блок13 определения равенства фаз входных последовательностей. Это осуще.ствляется путем подачи на входыЙ 5-триггера 15, выход которого слу 40жит выходом 20 анализатора, сигнала1равного сумме частот входных сигналов с выхода элемента ИЛИ 7=6, напервый вход сигналов с выходов блока исключения совпадающих импульсовчерез элемент ИЛИ 14 на второй вход.Суммарный сигнал с выхода элементаИЛИ 7=6 осуществляет, например, сбросй 5-триггера 15 в нулевое состояние.Если выходные частоты...
Устройство слежения за задержкой псевдошумового сигнала

Номер патента: 1045406
Опубликовано: 30.09.1983
Авторы: Алексеев, Глазов, Груша, Жодзишский, Коваленко, Ладыко
МПК: H04L 7/02
Метки: задержкой, псевдошумового, сигнала, слежения
...но в некоторых случаях и этаошибка недопустима.Цель изобретения - понышение точности слежения за задержкой.Поставленная цель достигаетсятем, что в устройство слежения за.задержКой псевдошумового сигнала,содержащее два канала обработки, каждый из которых соедржит.последовательно соединенные перемножитель иполосовой фильтр, при этом первыевходы перемножителей объединеныи являются входом устройстна, а квторым входам подключены первый ивторой выходы формирователя опорного сигнала соответственно, к входукоторого подключены последовательносоединенные цифровой фильтр и упранляемый .тактовый генератор, введеныв первый канал последовательно сое-диненные фазовращатель, первый ограничитель, формировательопорныхсеток импульсов, первый блок...
Двоичный сумматор

Номер патента: 857976
Опубликовано: 23.08.1981
МПК: G06F 7/50
...что на этотвход во время тактового импульса третьей фазыкаждого такта подается сигнал, т, е. при от.сутствии импульсов на шинах Х 1 и Х 2 троичныйэлемент 3 является генератором сигналов отри.цательной полярности,Рассмотрим работу двоичного сумматорана примере суммирования двух положительннхчисел 3 и 6. Первое слагаемое, число 3, вдвоичной системе счисления представляется по.ложительными сигналами в первом и второмразрядах, Второе слагаемое, число 6, представляется отсутствием сигнала в первом разряде иположительными сигналами во втором и третьем разрядах,Положительный сигнал первого разряда пер.вого слагаемого подается на вход 1 первойгруппы элементов 1 и 3, при этом передаетсясигнал на вход 1 второй группы элемента 3(фиг. 1 и...
Устройство для управления лентопротяжным механизмом

Номер патента: 934550
Опубликовано: 07.06.1982
Авторы: Исаченко, Мешкис, Навицкас, Раджюнас, Сруогюс
МПК: G11B 15/46
Метки: лентопротяжным, механизмом
...элементИЛИ 23, подсоединенный к выходам 19и 20 сигналов "Рабочий ход" - "Перемотка вперед" Формирователя 18 сигналов управления, и включенные последовательно дополнительный коммутатор 24, усилитель 25 и частотный дискриминатор 26Последний соединен спервым входом первого коммутатора 16,выходы которого подсоединены к третьим входам первого и второго регулирующих элементов 1 и 5, а второй вход - к выходу 2 1 сигнала "Перемотка назад" формирователя 18 сигналов управления. Дополнительныйкоммутатор 24 подсоединен к выходамдатчиком 27 и 28 вращения асинхронных электродвигателей 3 и 7 приемного и подающего узлов 4 и 8, к выходулогического элемента ИЛИ 23 и к выходу 21 сигнала "Перемотка назад" формирователя 18 сигналовуправления. Выход 20...
Устройство обнаружения шумоподобных сигналов с приемом информации

Номер патента: 1840564
Опубликовано: 20.06.2008
Автор: Сидоренко
МПК: H04B 1/10
Метки: информации, обнаружения, приемом, сигналов, шумоподобных
Устройство обнаружения шумоподобного сигнала по авторскому свидетельству №1840712, отличающееся тем, что, с целью повышения помехозащищенности поиска и обнаружения шумоподобного сигнала, а также приема информации, введены дополнительная группа корреляторов и фазовый детектор, причем входы фазового детектора подсоединены к соответствующим выходам информационного коррелятора, решающей схемы, второй и четвертой группы корреляторов, следующие три входа решающей схемы подключены через дополнительную группу корреляторов к выходам управляемого генератора информационной псевдослучайной последовательности, четвертый вход дополнительной группы корреляторов соединен с входом устройства, а выход фазового детектора соединен с выходом устройства.
Предыдущий патент: Фазовая следящая система с комбинированным управлением
Следующий патент: Устройство для программного управления положением объекта
Случайный патент: Способ возведения соткнутых сводов