B25J — Манипуляторы; камеры, оборудованные манипуляторами
Манипулятор

Номер патента: 919864
Опубликовано: 15.04.1982
Автор: Котликов
МПК: B25J 1/02
Метки: манипулятор
...первого механизма, ведущее зв мое звено 5 второго механизма чатые колеса 7 и 8, закреплен 15 и 10, ось 11 и основание 12. Стойкаманипулятора за раллельно основанию 12, стойк ханизма совмещена с ведомым вого механизма, а схват 6 см 20 ведомом звене 5 второго меха ложенном под ведомым звеном ханизма, при этом ведущие з этих механизмов связаны меж чатой передачей, состоящей из93Ведущие звенья 2 соединены со стойкой 1 и ведомым звеном 3 дополнительными осями 13 и 14 так, что образуют шарниры, имеющие две степени свободы. В результате этого манипулятор имеет возможность совершать колебательные движения от механизмов приводов в двух взаимно перпендикулярных направлениях, увеличивая зону обслуживания.Манипулятор работает следующим...
Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата

Номер патента: 919865
Опубликовано: 15.04.1982
Автор: Горбань
МПК: B25J 3/00
Метки: взаимно-перпендикулярных, вращения, губок, движения, захвата, осей, относительно, приводное, промышленного, робота, руки
...в себя вал 16, установленный в основании 1 захвата на подшипнике 7 и расположенный под углом к осиего вращения, зубчатое колесо 18 для соединения с двигателем 3. На валу 16 установлена управляемая муфта, состоящая из приводной полумуфты 19 и тормозной полумуфты 20, предназначенная для поочередногосоединения корпуса 2 захвата либо с валом16, либо с полой осью 21, жестко закрепленной на основании 1 захвата,На осях 6 и 21 могут быть установленыпозиционные датчики 22 и 23, кинематически связанные с основанием 1 захвата и корпусом 2 захвата,Блок управления движения корпуса 2захвата, связанным с губками захвата (начертеже не показано) по одной координате,например вращение относительно основания1 захвата, содержит генератор 24 импульсови...
Механическая рука

Номер патента: 828550
Опубликовано: 23.04.1982
Авторы: Белянин, Кобринский, Корендясев, Розин, Саламандра, Соколовский, Столин, Тывес, Фролов
МПК: B25J 1/00
Метки: механическая, рука
...47 уравновешивающего механизма, Входы этих дифференциалов связаны с индивидуальными двигателями 16 - 18. У 1)авновешпвающпй механизм имеет также сииусные механизмы 48 - 50, оснащенные пружинами 51 - 53 и связанные с выходами дифференциалов 45 - 47. Один выход дифференциала 45 связан с основанием, а аналогичные выходы дифференциалов 46 и 47 кинематически связаны с соседиимп дифференциалами. На втором выходе дифференциала 17 установлена программно-управляемая муфта 54. Индивидуальный двигатель 18 связан с цепью привода через программно-управляемую муфту 55, а двигатель 19 - через муфт 56,Между валами индивидуальных двигателей 15 и 19 приводов звеньев 2 и б с вертикальными осями поворота установлена дополнительная ки ематическая цепь 57,...
Механическая рука

Номер патента: 828551
Опубликовано: 23.04.1982
Авторы: Белянин, Кобринский, Корендясев, Розин, Саламандра, Соколовский, Столин, Тывес, Фролов
МПК: B25J 1/00
Метки: механическая, рука
...1. Там же установлены компенсирующий механизм, образованный рядом дифференциалов 8 - 14, и индпьндуальпые двигатели 15 - 21, связанныс со звеньями руки кинематическими цепями, выполненными, например, на тросовых передачах 22 - 28. Натяжение всей системы передач руки осуществляется механизмом, содержащим ряд сумматоров-дифференциалов 29 - 35 с согласующими редукторамн если это необходимо), торсион 36 н натяжную тросовую ветвь 37, уложенную на ролики 38 - 44. Уравновешивапие веса звеньев 3 - 5 производится устройством, образовашгым дифференциалами 45 - 47, выходные валы которых связаны с синусными механизмами 48 - 50, оснащенными разгружающими упругими элементамн - пружинами 51 - 53.Ползуны 54 и 55 (или 56 и 57), являющиеся выходными...
Привод исполнительного органа манипулятора

Номер патента: 921846
Опубликовано: 23.04.1982
МПК: B25J 1/02
Метки: исполнительного, манипулятора, органа, привод
...работает следующим образом,При отсутствии предмета в захвате, что соответствует отсутствию сигнала с системы 7 управления, обмотка электромагнита обесточена и двухполостный распределитель 1 находится в исходном положении (фиг.1), 1 О При этом разгрузочный пневмоцилиндр 2, шток которого связан с плечом исполнительного органа, подключен . к основной пневмомагистрали 3. При этом регулятор давления 5 и предохранительный клапан 6 в основной пневмомагистрали 3 настроены таким образом, что на поршень разгрузочного пневмоцилиндра 2 действует давление, уравновешивающее статические нагрузки только от веса конструкции исполнительного органа. При захвате предмета сигнал с системы управления 7 поступает на обмотку электромагнита, шток...
Манипулятор

Номер патента: 921847
Опубликовано: 23.04.1982
Авторы: Антипов, Бутько, Еланский, Зацаринный, Кобылин
МПК: B25J 5/02
Метки: манипулятор
...а3 921 винт 15 - с дополнительной траверсой 16, на которой установлен исполнительный орган, выполненный в виде многошпиндельного механизма 17, имеющего дополнительный привод 18 с муфтой предельного крутящего момента. Зазимные элементы 19 закреплены на шпинделе 20 механизма 17.Манипулятор работает следующим об.разом.Каретка 1 маниудятора в исходном положении находится на позиции : загрузки. Исполнительный орган пере" мещается вниз, захватывает сразу несколько деталей с конвейера, поднимается вверх двумя винтовыми механизмЭми. Каретка перемещается на позиц цию нанесения смазки (не показана). и останавливается. Исполнительный орган опускается вниз вшесте с вращающимися изделиями, на которые наносится тонкий слой смазки в специальной...
Манипулятор

Номер патента: 921848
Опубликовано: 23.04.1982
Авторы: Воеводин, Жарков, Рапопорт
МПК: B25J 9/00
Метки: манипулятор
...расположены сопряженные узлы 8 вращения, то путем вращения несопряженных узлов 9 вращения в одном направлении можно сложить звено под любым заданным углом. Манипулятор имеет высокую подвижность звеньев и позволяет расширить технологические возможности. Формула изобретения 1, Манипулятор, содержащий основание, блок управления, захват и шарнирно связанные звенья, состоящие каждоеиэ четырех рычагов, соединенных междусобой активными узлами вращения, имеющими двигатели, из которых противоположно расположенные узлы вращения шарнирно связаны с узлами вращения смежных звеньев, о т л и ч а ю щ и й с ятем, что, с целью расширения технологических возможностей, пары рычагов,связанные остальными узлами вращения,лежат в параллельных плоскостях,причем...
Привод промышленного робота

Номер патента: 921849
Опубликовано: 23.04.1982
Автор: Павленко
МПК: B25J 9/00
Метки: привод, промышленного, робота
...10 от прогибания. Передним торцем винт 12 взаимодействует в заднем край нем положении штока 3 с крьппкой 14.Привод работает следующим образом,При подаче воздуха (жидкости) в левую полость цилиндра 1 поршень 2 со штоком 3 перемещаются вперед . Настройка требуемого перемещения штока 3 вперед достигается вращением штока 6 совместно с винтом 8, в результате чего гайка 9 перемещается на необходимую величину. При перемещении поршня 2 и штока 3 вперед, шайба-упор 11 скользит относительно неподвижного стержня 10, а внутренняя поверхность штока 3 - относительно Опорного кольца 13. Контакт по боковым поверхностям б шайбы-упора 11 и стержня 10 препятствует провороту штока 3 вокруг собственной оси, При подходе шайбы-упора 11 к гайке винта 8...
Манипулятор

Номер патента: 921850
Опубликовано: 23.04.1982
Автор: Хазак
МПК: B25J 11/00
Метки: манипулятор
...1 цилиндра 1 горизонтального перемещения и через шток 3 в рабочую полость цилиндра 9.При перемещении поршня 2 на расстояниефланец 4 упирается в шток 8 гидравлического амортизатора 7. О При этом скорость горизонтального пе ремещения резко падает. При пос туплении сжатого воздуха в рабочую полость цилиндра 9 его поршень 10 перемещается до упора на расстояние 1. При этом захватная часть 14 наклоняется на угол 4 обеспечивая опускание. детали 16 на величину Ь. Преодолев сопротивление гидравлического амортизатора 7 поршень 2 цилиндра горизонтального перемещения проходит расстояние 1 А, при этом фланец 4 перекрывает управляющее сопло 6. Таким образом, поршень 2 смещается на расстояние 25 .= + 1 А. К этому моменту деталь 16 находится уже в...
Способ позиционирования исполнительного органа манипуляционного робота

Номер патента: 921851
Опубликовано: 23.04.1982
Авторы: Комиссаров, Кузетенко, Ломака, Федоров
МПК: B25J 11/00
Метки: исполнительного, манипуляционного, органа, позиционирования, робота
...органа манипуляционного робота.Система имеет в своем составе задаищее устройство 1,следящий привод 2, содержащий элемент 3 сравнения, разомкнутую часть 4 привода и датчик 5 положения, исполнительный орган 6 манипулятора с механизмом 7 уравновешивания, имекщим узел 8 регухлровки, регистрирукщий прибор 9.3 92С помощью задакщего устройства 1 на привод 2 оператором 10 подается пробная серия эталонных сигналов устав(ж). В качестве задающего устройства 1 может быть выбрана электронно-вычислигельная машина ЭВМ). В этом случае уставки хранятся в памяти машин. Количество уставок выбирают с учетом рабочей зоны привода 2,Задакщее устройство 1 выдает уставки так, чтобы привод 2 успевал отработать каждую из них, при. этом после отработки каждой...
Схват

Номер патента: 921852
Опубликовано: 23.04.1982
Авторы: Волков, Дебунов, Ильин, Комисов, Митяшин
МПК: B25J 15/00
Метки: схват
...щими иэ зажимных губок 15 и: 16 иг.3), Губка 15 жестко закреплена на одном конце двуплечего рычага 17 . имеющего , возможность вращения на оси 18. На другом конце рычага 17 (фиг. 2) на Ьси 19 установлен ролик 20, поджима" маемый к дополнительному копиру 21 пружиной 22 растяжения.20Шток 23, на одном конце которого закреплена зажимная губка 16, жестко связан с дополнительным копиррм 21. Ва другом конце штока 23 установлен ролик 24, вращающийся на оси 25. Воз"25 вратно-поступательное движение штока 23 с губками 16 и дополнительным копиром происходит в скользящих опорах 26 от пружины 27 сжатия и кулачка-копира 28, жестко связанного с валом 29, поворот которого осуществляется от механизма 30 поворота(гидроцилиндра) через соединительный...
Устройство контроля захвата листовой заготовки рукой промышленного робота

Номер патента: 925624
Опубликовано: 07.05.1982
Авторы: Зерний, Крючков, Мальцевский, Семенов, Скородумов, Сулейманов
МПК: B25J 15/00
Метки: заготовки, захвата, листовой, промышленного, робота, рукой
...как показано на фиг,16. Это искривление вызывает замыкание контактов геркона. Замыкание контактов коммутирует электрическую цепь, в которую включен датчик. На этом принципе основано действие датчиков, используемых в предлагаемом устройстве контроля. Контроль осуществляется следующим40 образом,Датчик 6 контроля наличия заготовки закрепляется на захвате руки робота и настраивается с помощью микрометрических винтов 12 относи 45 тельно плоскости захвата листовой заготовки, например, электромагнитным захватом 8 таким образом, чтобы призахвате заготовки она попадала в магнитное поле магнитов датчика и вызывала искривление магнитных силовых линий, В этом случае контакты геркона датчика 6 замыкаются,и коммутирувт цепь управления 15...
Захват руки промышленного робота

Номер патента: 925625
Опубликовано: 07.05.1982
Авторы: Зерний, Крючков, Мальцевский, Семенов, Скородумов, Сулейманов
МПК: B25J 15/00
Метки: захват, промышленного, робота, руки
...также поворачиваетЕося, одновременно кривошипом механизма 2. Поворот кривошипов механизмов 2 и 3 вызывает вертикальныевозвратно поступательные перемещенияшатунов механизмов 2 и 3 и шарнирнос ними связанного элемента 1 осуществляющего захват заготовки,Кинематическая связь кривошипныхмеханизмов 2 и 3 посредством зубчатых секторов 4 и 5 обеспечивает синхронный поворот кривошипов и строго50вертикальные возвратно-поступательные перемещения шатунов механизмови, следовательно,. вертикальное безперекосов и смещений от вертикальной оси перемещение элемента 1,55Кривошипные механизмы 2 и 3 выполнены дезаксиальными с отношениемдлины кривошипа к длине шатуна 5 фй.1=-="(0 0-1) и отношением эксцентрй 1ситета (е ) к радиусу кривошипаК=-=(0, 35-0,...
Схват манипулятора

Номер патента: 927486
Опубликовано: 15.05.1982
МПК: B25J 11/00
Метки: манипулятора, схват
...6, который расположен внутри телескопического звена 2. На нижней части корпуса 1 установлен привод 7 вращения, кинематически связанный с рейками 5 через шестерни 8 и 9.Корпус 1 снабжен зубчатыми рейками 10, а на штоке 6 установлены дополнительные рейки 11 и электромагниты 12, а на телескопическом звене 2 установлены фиксаторы 1 3 и пружины 1 4.Схват работает следующим образом.При обесточенном электромагните 12 пружины обеспечивают сцепление фиксаторов 13 с рейками 10 корпуса 1. В этом случае при включении привода 7 вращающий момент через шестерни 9 и 8 передается на рейки 5 штока 6. В результате этого шток 6 перемещается3 927486 4относительно телескопического звена 2 Данное изобретение позволяет сущести осуществляется разведение или...
Манипулятор

Номер патента: 929430
Опубликовано: 23.05.1982
Авторы: Коровятников, Решетников, Шаталов
МПК: B25J 1/00
Метки: манипулятор
...начального участка характеристики спи 1 О 15 20 25 Зо 35 40 45 50 55 ральной пружины 14, близкой к пропорциональной зависимости между величиной передаваемого момента и углом поворота пружины. Прричем этот момент должен соответствовать моменту, создаваемому уравновешиваемыми частями манипулятора и размещенным на нем инструментом 8.Если уравновешивающий гравитационные силы механизм выполнен с барабаном 20 и гибкой нитью 21 (фиг. 5), то спиральная пружина 14 размещается внутри барабана 20 при этом внутренний конец ее закрепляется на оси 22, а наружный - на барабане 20, Один конец гибкой нити 21, устанавливается в шарнире 13, а другой после поворота барабана на угол, определяемый характеристикой спиральной пружины 14, устанавливается в...
Модуль манипулятора

Номер патента: 929431
Опубликовано: 23.05.1982
Автор: Хомерики
МПК: B25J 11/00
Метки: манипулятора, модуль
...конец пластины крепится ца наружной поверхности цилиндра 2.Втулка-переходник 4 фиксируется посредством контргайки 12. Подшипник 6 фиксируется шайбами 13, а другой подшипник фиксируется в цилиндрах 1 и 2 посредством стопорного кольца 14 и шайбы 15.В теле цилиндров по периметру имеютсяотверстия 16 и 17 для свободного перемещения газообразной среды, находящейся в полостях цилиндров 1 и 2. Посредством электропроводов 18 и 19 (фиг. 1) подводится питание соответственно к обкладкам конденсатора (стержневый электрод 8 поверхность цилиндра 1) и к пластине 9.55Полые втулки-переходники 4 служат для соединения сустава к другим частям манипулятора. Подшипники 6 и шайбы 7 выпол 4нецы из термостойкого и электроизолирующего материала с малым...
Захват манипулятора

Номер патента: 929432
Опубликовано: 23.05.1982
Авторы: Алпатов, Ивлев, Панченко, Тарасов
МПК: B25J 15/00
Метки: захват, манипулятора
...в эластичной оболочке. Эта информа 929432ция заносится в блок логики, чем и осуществляется настройка захвата на работу с заданным набором деталей разных типов. Вес, прочность и другие параметры деталей в процессе работы захвата непосредственно не определяются, но информацияимеющаяся после настройки в блоке логики, дает возможность формировать давление в эластичной оболочке, соответствующее параметрам данной детали.В рабочую зону манипулятора, например, на ленте транспортера, подаются детали 1 О нескольких типов, каждую из которых, в соответствии с ее назначением, необходимо переместить в нужную позицию. Для этой цели основание 1 с эластичными оболочками 4 при отсутствии силового давления в оболочках надевается на деталь 10, н от...
Манипулятор

Номер патента: 931460
Опубликовано: 30.05.1982
МПК: B25J 1/08
Метки: манипулятор
...относительно платформы.Кроме того, шток выполнен в виде упругой пластины, размещенной между тягами.На фиг. 1 изображен манипулятор, продольный разрез; на фиг. 2 - разрез А-А на фиг.1.Манипулятор содержит платформу 1, служащую для переноса объектов и герметично соединенную посредством сильфона 2 с присоединенным фланцем 3. Платформа 1 соединена с вращающей втулкой 4, которая жестко связана с тягами 5 и 6, выполненными в виде упругих элементов, штоком 7, выполненным в виде гибкой пластины, расположенной между тягами 5 и 6.Маниттулятор работает следующимобразом.Дпя обеспечения изгиба платформы 1 в требуемой плоскости необхо димо повернуть шток 7 относительно платформы 1 на заданный угол, При приложении внешней осевой силы, к тяге 5,...
Способ контроля исправности чехла исполнительного органа копирующего манипулятора

Номер патента: 931461
Опубликовано: 30.05.1982
Автор: Горбунов
МПК: B25J 3/00
Метки: исполнительного, исправности, копирующего, манипулятора, органа, чехла
...всигналы низкой частоты, которые воспринимаются оператором или подаютсяна индикаторные устройства. Это даетоператору возможность, находясь 1 Ов операторском помещении, судить огерметичности чехла исполнительногооргана манипулятора, находящегося вгорячей камере, и о правильности установки чехла. 15. Для осуществления способа акустицеские колебания могут улавливатьсяакустико-пневматическими или электродинамицескими преобразователями. Акус"тико-пневматический приемник с резонатором Гельмгольца, состоящий из горловины и емкости, обладает тем свойством, что амплитуда звукового давления внутри его полости резко возрастает при совпадении частоты колеба 5ний с частотой звукового сигнала, который воздействует на его вход. Собственная частота...
Промышленный робот

Номер патента: 931462
Опубликовано: 30.05.1982
Авторы: Батуркин, Боровитченко, Голявин, Дежуров, Каверин, Каширин, Лебедева, Хаймов, Шаблинский, Шаршов
МПК: B25J 9/00
Метки: промышленный, робот
...включении робота на заданныйрежим работы сжатый воздух поступаетот цеховой сети в узел 8 подготовки сжатого воздуха. 8 узле 8 автоматически обеспечивается контрольдавления воздуха в цеховой сети, всистеме робота, в системе датчиковвнешней и внутренней информации,очистка воздуха от частиц воды, компрессорного масла и твердых частиц,сброс из пневмосистемы избыточногодавления, контроль минимального дааления в пневмосистеме, питание че 5 19 15 20 25 ЗО 35 4 О 45 50 55 рез пневмораспределители блоков12 и 13 нулевой и общей защиты,блока 11 усилителей дискретных сигналов, датчиков 7 внешней информации, цилиндра 15 подпитки, гидротормозов 14,От пневмораспределителей блока 12нулевой защиты питание подается кпневмораспределителям 9,...
Промышленный робот

Номер патента: 931463
Опубликовано: 30.05.1982
Авторы: Иванова, Назаров, Панасенков
МПК: B25J 13/00
Метки: промышленный, робот
...колес обкатывается по зубчатому колесу , жестко закрепленному на оси 4 основания 1, а второе колесо блока приводит во вращение зубчатое колесо 9, которое в свою очередь через втулку 10 закручивает торсионный вал 14, В связи с тем, что предельный угол закручивания торсионного вала ограничен и значительно меньше максимального значения угла отклонения плеча 2 ( 90), передаточное отношение зубчатых колес выбрано таким, чтобы колесо 9 вращало торсионный вал в ту же сторону, что и плечо 2, но отставая от него на угол, необходимый для закручивания торсионного вала в сторону, противоположную отклонению плеча 2. Вращение зубчатого колеса 9 приводит во вращение втулку 10, ролики 12 которой, обкатываясь по копиру профильной канавке корпуса 6,...
Схват манипулятора

Номер патента: 931464
Опубликовано: 30.05.1982
Автор: Гвоздев
МПК: B25J 15/00
Метки: манипулятора, схват
...посторонних источников света устройство заключено в светонепроницаемый кожух 16. Губки 1 приводятся в движение с помощью силового цилиндра и крепятся к его штокам 17. Корпус 18 имеет отверстие 19 для подвода рабочей среды, Аналогичные отверстия 20 выполнены в крышках 21..Схват работает следующим образом, При подаче рабочей среды к отверстию 19 губки 1 разводятся, схват подводится к предмету, затем путем подачи рабочей среды к отверстиям 20 производится сближение губок 1, и наконечники 4 рабочих стержней 2 вступают в соприкосновение с грузом. Стержни 2 подпружинены пружинами 3 и взаимодействуют с гибкой и нерастяжимой лентой 6, поэтому суммарная величина пути, пройденного рабочими стержнями 2 одной губки 1 от нейтрального положения в...
Захват манипулятора

Номер патента: 931465
Опубликовано: 30.05.1982
Авторы: Ботез, Кирика, Попа, Хаймович
МПК: B25J 15/00
Метки: захват, манипулятора
...4 - вид Б на фиг. 2. Захват манипулятора содержит сочлененные с ладанью 1 пальцы, каждый из которых собран из отдельных звеньев 2, имеющих отверстия 3, фасонные поверхности 4 и направляющие 5 по которым установлены звенья 2 с возможностью перемещения вдоль 15 пальца на пружинящем элементе 6. Вдольодной из фасонных поверхностей 4 звена 2 по его продольной оси симметрии выполнен паз 7, а вдоль другой фасонной поверхности - выступ 8. Звенья 2, образующие пальцы для захвата изделия 9, установлены выступами 8 в пазах 7 соседних звеньев, причем глубина паза 7 больше высоты выступа 8, что обеспечивает контакт зубьев 2 по фасонным поверхностям 4. Через отверстие 3 звеньев 2 каждого пальца пропущен трос931465 А иг,2. Вид иг.7 В. Ушаккас...
Захват манипулятора

Номер патента: 931466
Опубликовано: 30.05.1982
Автор: Долгов
МПК: B25J 15/00
Метки: захват, манипулятора
...захват манипулятора, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А - А на фиг. 1.Захват манипулятора включает корпус 1,установленные на нем соосно в противоположные стороны двигатели линейного перемещения, выполненные в виде цилиндра 2 со штоками-поршнями 3 и 4, имеющи 2 о ми на концах вилки 5, кронштейны б сгубками 7 и параллелограммные подвески, ведущие 8 и ведомые 9 звенья которых связаны с одной стороны с вилкой 5 и корпусом 1 посредством сухарей О и осей 11931466 Формула изобретения фиь.1 соответственно, а с другой - с кронштейнами 6 посредством осей 2. Губки 7 установлены с возможностью поворота на осях 13 относительно ведущих 8 и ведомых 9 звеньев параллелограммных подвесок и фиксации в нужном положении винтами...
Схват промышленного робота

Номер патента: 931467
Опубликовано: 30.05.1982
МПК: B25J 15/00
Метки: промышленного, робота, схват
...в виде опор качения, которые получают усилие зажима от поршня 2, передающего усилие на поршень 6, и кулачков 7, через передающий толкатель 28 и рычаг 26. При подаче команды на установку детали 30, например, в патрон станка канал 12 соединяется с атмосферой, а в канал 13 подается давление. Поршень 2 при этом отходит в левое положение, а поршень 6 удерживается на месте. При отходе поршня 2 в левое положение губка 24 пружиной 25 отводится от детали 30 и одновременно движение со штока 3 через рейку 4, зубчатые венцы 16 и 17 зубчатого колеса передается на рейку 18, которая начинает перемещаться по направлению стрелки, обозначенной на фиг. 1 и 3 сплошной линией. Рейка 18 перемещает в указанном направлении кронштейны 20 и направляющую 19...
Захват промышленного робота

Номер патента: 931468
Опубликовано: 30.05.1982
Авторы: Печатников, Попов, Северова, Храбров
МПК: B25J 15/00
Метки: захват, промышленного, робота
...3 между собой и пружинами 4 со скобами 5. На скобах 5 устанавливаются электромагниты 6.5 Крышка 7 крепится к корпусу 1 с помощьювинтов 8, скобы 5 - винтами 9. Деталь 10 попадает внутрь корпуса 1 через отверстие.Захват работает следующим образом.В исходном положении катушки электро- Омагнитов 6 включены в электрическую сеть одновременно, губки 2 притянуты к ним, растянув пружины 3 и преодолев усилие пружины 4. После попадания изделия 10 через отверстие в корпус 1, катушки электромагнитоь 6 обесточиваются, губки 2 5 зажимают деталь 10, а пружины 3 центрируют положение детали. Для улучшения условий сборки на сборочной позиции электромагниты 6 могут включаться одновременно, последовательно .или попарно в любом сочетании. Деталь 10, зажатая...
Запястье манипулятора
Номер патента: 931469
Опубликовано: 30.05.1982
Авторы: Аветиков, Груздев, Корытько, Савин, Тресс
МПК: B25J 17/00
Метки: запястье, манипулятора
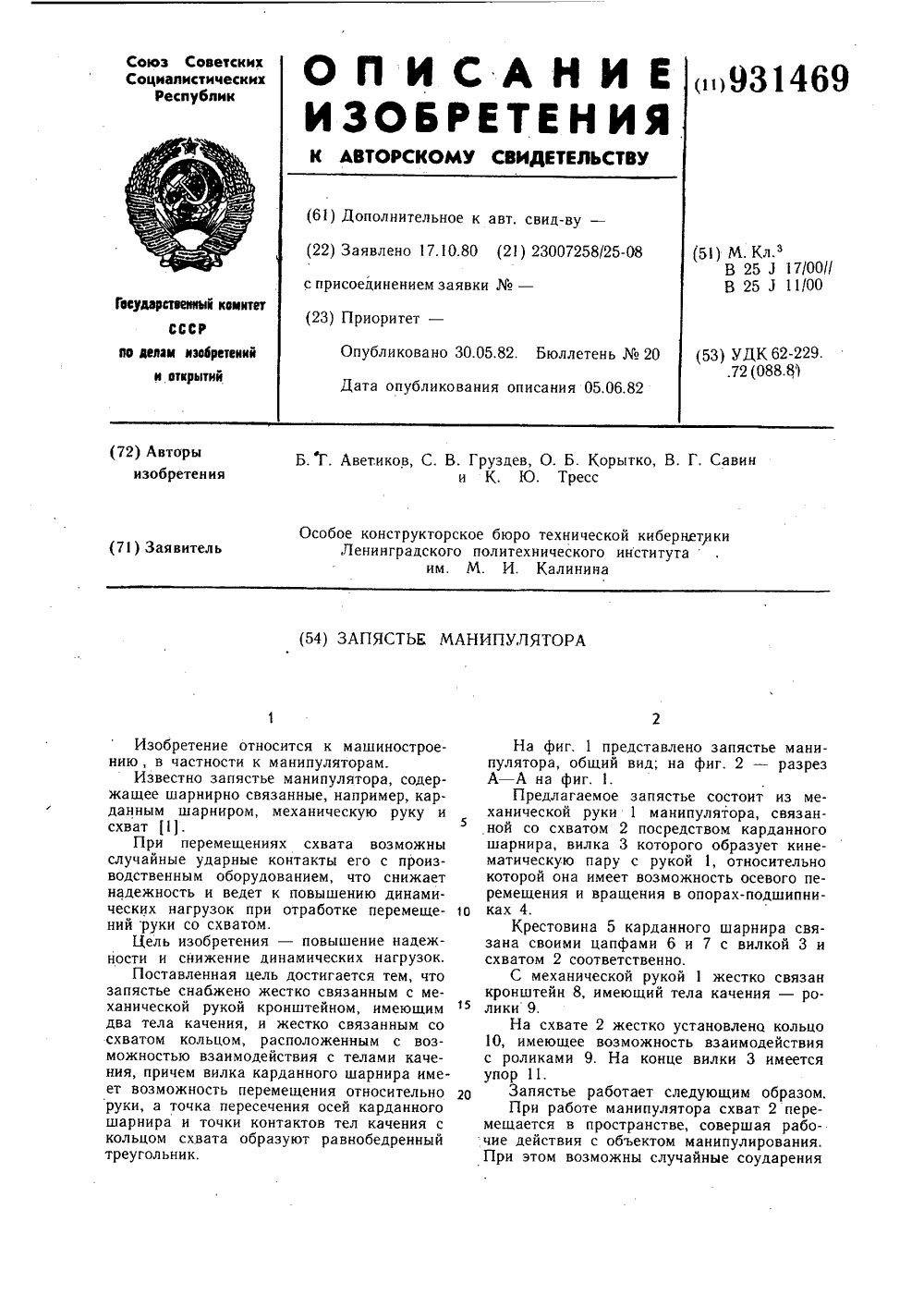
...поверхности кольца 10 с роликами 9 и упорами 11 в подшипник 4.20Пример 2, Схват 2 испытывает боковое усилие от внешнего оборудования, которое возможно при повороте руки 1 манипулятора в горизонтальной плоскости, В этом случае кронштейн 8 вместе с крестовиной 5 поворачивается вокруг оси цапф 6, одно временно происходит отрыв поверхности кольца 10 от одного из роликов 9 и поворот схвата 2 вокруг оси цапф 7, т. е. движение по конической поверхности, вершина которой находится в точке пересечения осей цапф 6 и 7, а телесный угол при вершине определяется расстоянием между роликами 9 и их расстоянием до оси карданного шарнира. При включении обратного движения схвата 2 он под действием собственного веса возвращается в исходное...
Копирующий манипулятор

Номер патента: 933447
Опубликовано: 07.06.1982
Авторы: Гольбштейн, Иванов, Казыханов
МПК: B25J 1/06
Метки: копирующий, манипулятор
...и 13, 14 и 15,16 и 17,пантограф 3 -.из пар звеньев 18 и 19, 20 и 21, 22 и 23.Манипулятор работает следующимобразом.При фиксированном положении.кронштейна 8 любое поступательноеперемещение управляющей рукояткой 2 10расположенной в точке С пантографа 1,вдоль какой-либо оси систеж координат О., ХУ, Е с началом координатв центре шаровой опоры 5, приводитк противоположному перемещению точки 15В пантографа 1 вдоль этой же оси.В свою очередь перемещение точки В,принадлежащей и пантографу 3, относительно осей системы коордийатОХ 2 УЕ с началом координат в 20центре шаровой опоры б, .также приводит к противоположному перемещению точки А относительно этих жеосей,В итоге поступательным перемещениям управляющей рукоятки манипулятора 2,...
Манипулятор

Номер патента: 933448
Опубликовано: 07.06.1982
Авторы: Афанасьев, Еськов, Задирака, Промысловский
МПК: B25J 5/00
Метки: манипулятор
...вращения вокруг своей продольной оси. В то же время шарнир 11 имеет возмож- ность качания совместно с исполнительным органом в вертикальной плоскости вокруг оси От-От. При этом ось качания О -О шарнира 11 совьвз 1щена с осью опор вращения 10.Работает манипулятор следующим образам.В захватном органе 7, управляемом рукоятками 9, посредством самотормозящего механизма (на чертеже не показан) зажимают, заготовку. Подвижный .противовес 8 перемещают по хоботу до достижения равновесия исполнительно933448 формула изобретения Заказ 4060/27 Подписное П "Пат д, ул. 4. оект го органа относительно оси качания О -О. В этом положении противовес фйксируется средствами стопорения (на чертеже не показаны), Затем посредством червячной пары 6 регулируют...
Микроманипулятор

Номер патента: 933449
Опубликовано: 07.06.1982
Авторы: Амбразявичус, Курило, Милукене, Рагульскис, Шаткус
МПК: B25J 7/00
Метки: микроманипулятор
...8, в котновлен держатель 9. Аналогичным держателем 9 снабжена и вторая верхняя каретка 3. Между держателями 9 помещена исследуемая сфера 10. Верхние каретки 3 координатных приводов 2 соединены с пантографом 11, включающим ось 12 шарнира, закрепленную на основании 1, рычаги 13,14 и подвижные оси 15 шарниров 16, сопряженные с верхними каретками 3.Работает микроманипулятор следую 10 щим образом.При подключении преобразователей 6 или 7 к источнику многофаэного высокочастотного напряжения в пьезокерамических преобразователях 6 и 7 возбуждаются продольные и поперечные колебания, сдвинутые по фазе, создающие движущую силу в зоне механического контакта преобразователей 6 с каретками 4, перемещающую каретки 4 в направлении У и движущую силу...