Запястье манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
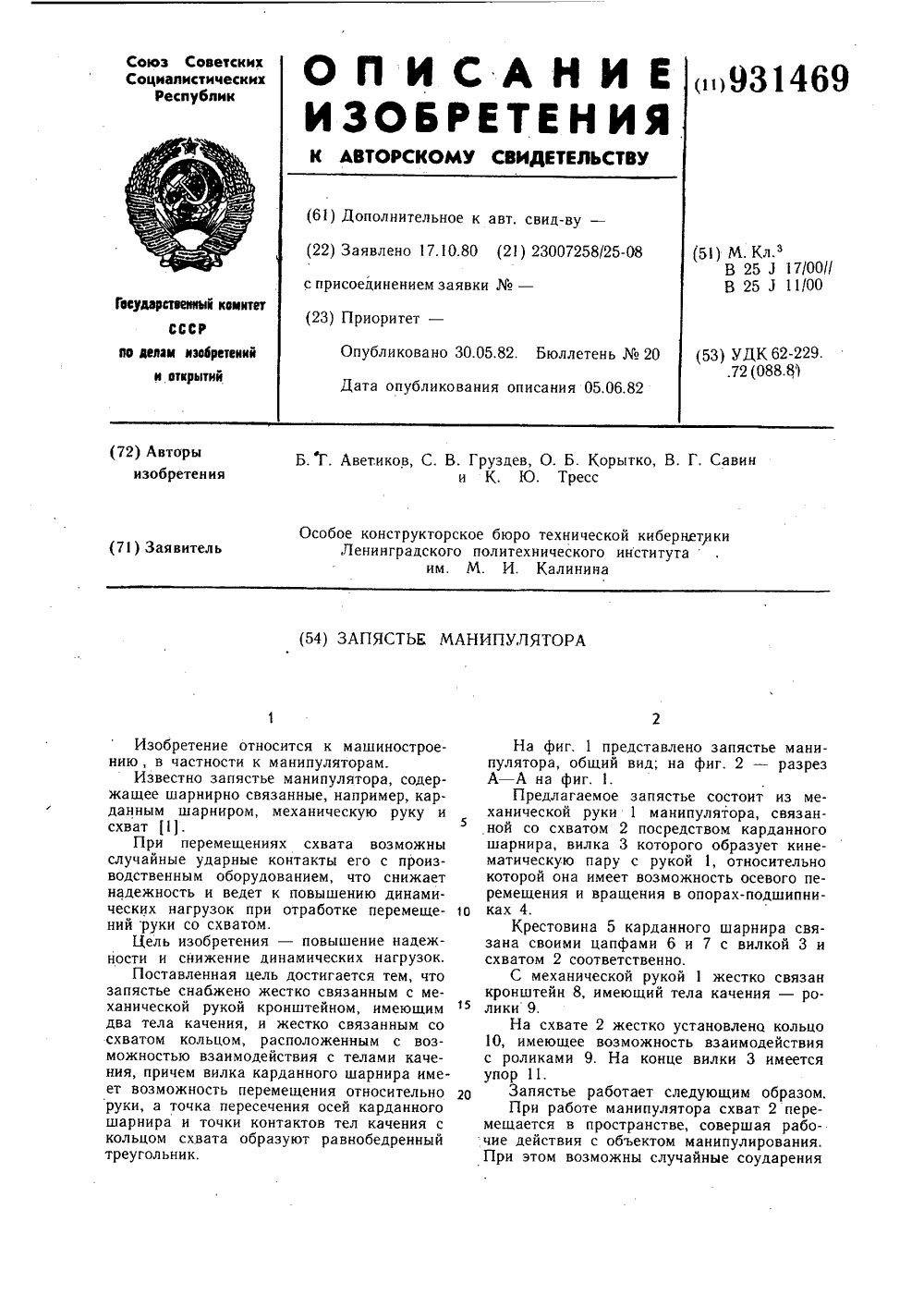
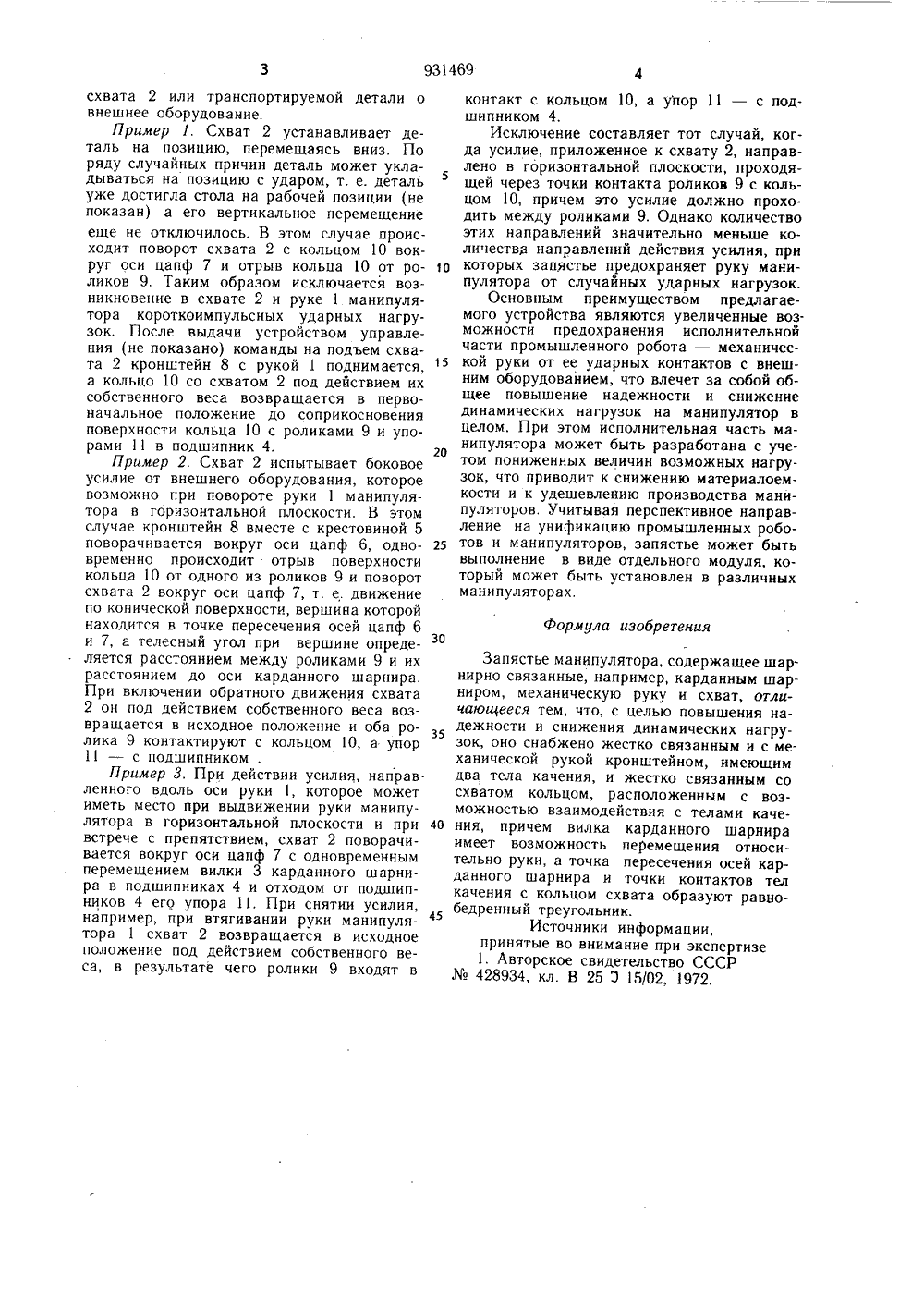
О П И С А Н И Е ,)31469ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспубликОсобое конструкторское бюро технической кибернетики(54) ЗАПЯСТЬЕ МАНИПУ,ЛЯТОРА Изобретение относится к машиностроению, в частности к манипуляторам.Известно запястье манипулятора, содержащее шарнирно связанные, например, карданным шарниром, механическую руку и схват 1).При перемещениях схвата возможны случайные ударные контакты его с производственным оборудованием, что снижает надежность и ведет к повышению динамических нагрузок при отработке перемещений руки со схватом.Цель изобретения - повышение надежности и снижение динамических нагрузок.Поставленная цель достигается тем, что запястье снабжено жестко связанным с механической рукой кронштейном, имеющим два тела качения, и жестко связанным со схватом кольцом, расположенным с возможностью взаимодействия с телами качения, причем вилка карданного шарнира имеет возможность перемещения относительно руки, а точка пересечения осей карданного шарнира и точки контактов тел качения с кольцом схвата образуют равнобедренный треугольник. На фиг. 1 представлено запястье манипулятора, общий вид; на фиг. 2 - разрез А - А на фиг. 1.Предлагаемое запястье состоит из механической руки 1 манипулятора, связанной со схватом 2 посредством карданного шарнира, вилка 3 которого образует кинематическую пару с рукой 1, относительно которой она имеет возможность осевого перемещения и вращения в опорах-подшипнио ках 4.Крестовина 5 карданного шарнира связана своими цапфами 6 и 7 с вилкой 3 и схватом 2 соответственно.С механической рукой 1 жестко связанкронштейн 8, имеющий тела качения - ролики 9.На схвате 2 жестко установлена кольцо10, имеющее возможность взаимодействия с роликами 9. На конце вилки 3 имеется упор 11.Запястье работает следующим образом.При работе манипулятора схват 2 перемещается в пространстве, совершая рабочие действия с объектом манипулирования.При этом возможны случайные соударениясхвата 2 или транспортируемой детали о внешнее оборудование.Пример 1. Схват 2 устанавливает деталь на позицию, перемещаясь вниз. По ряду случайных причин деталь может укладываться на позицию с ударом, т. е. деталь уже достигла стола на рабочей позиции (не показан) а его вертикальное перемещение еще не отключилось. В этом случае происходит поворот схвата 2 с кольцом 10 вокруг оси цапф 7 и отрыв кольца 10 от ро О ликов 9, Таким образом исключается возникновение в схвате 2 и руке 1 манипулятора короткоимпульсных ударных нагрузок. После выдачи устройством управления (не показано) команды на подъем схвата 2 кронштейн 8 с рукой 1 поднимается, а кольцо 10 со схватом 2 под действием их собственного веса возвращается в первоначальное положение до соприкосновения поверхности кольца 10 с роликами 9 и упорами 11 в подшипник 4.20Пример 2, Схват 2 испытывает боковое усилие от внешнего оборудования, которое возможно при повороте руки 1 манипулятора в горизонтальной плоскости, В этом случае кронштейн 8 вместе с крестовиной 5 поворачивается вокруг оси цапф 6, одно временно происходит отрыв поверхности кольца 10 от одного из роликов 9 и поворот схвата 2 вокруг оси цапф 7, т. е. движение по конической поверхности, вершина которой находится в точке пересечения осей цапф 6 и 7, а телесный угол при вершине определяется расстоянием между роликами 9 и их расстоянием до оси карданного шарнира. При включении обратного движения схвата 2 он под действием собственного веса возвращается в исходное положение и оба ролика 9 контактируют с кольцом 10, а упор 11 - с подшипником .Пример 3. При действии усилия, направ. ленного вдоль оси руки 1, которое может иметь место при выдвижении руки манипулятора в горизонтальной плоскости и при 40 встрече с препятствием, схват 2 поворачивается вокруг оси цапф 7 с одновременным перемещением вилки 3 карданного шарнира в подшипниках 4 и отходом от подшипников 4 его упора 11. При снятии усилия, например, при втягивании руки манипулятора 1 схват 2 возвращается в исходное положение под действием собственного веса, в результате чего ролики 9 входят в контакт с кольцом 10, а упор 11 - с подшипником 4.Исключение составляет тот случай, когда усилие, приложенное к схвату 2, направлено в горизонтальной плоскости, проходящей через точки контакта роликов 9 с кольцом О, причем это усилие должно проходить между роликами 9. Однако количество этих направлений значительно меньше количества направлений действия усилия, при которых запястье предохраняет руку манипулятора от случайных ударных нагрузок.Основным преимуществом предлагаемого устройства являются увеличенные возможности предохранения исполнительной части промышленного робота - механической руки от ее ударных контактов с внешним оборудованием, что влечет за собой общее повышение надежности и снижение динамических нагрузок на манипулятор в целом. При этом исполнительная часть манипулятора может быть разработана с учетом пониженных величин возможных нагрузок, что приводит к снижению материалоемкости и к удешевлению производства манипуляторов. Учитывая перспективное направление на унификацию промышленных роботов и манипуляторов, запястье может быть выполнение в виде отдельного модуля, который может быть установлен в различных манипуляторах. Формула изобретенияЗапястье манипулятора, содержащее шарнирно связанные, например, карданным шарниром, механическую руку и схват, отличающееся тем, что, с целью повышения надежности и снижения динамических нагрузок, оно снабжено жестко связанным и с механической рукой кронштейном, имеющим два тела качения, и жестко связанным со схватом кольцом, расположенным с возможностью взаимодействия с телами качения, причем вилка карданного шарнира имеет возможность перемещения относительно руки, а точка пересечения осей карданного шарнира и точки контактов тел качения с кольцом схвата образуют равнобедренный треугольник.Источники информации,принятые во внимание при экспертизе 1, Авторское свидетельство СССР428934, кл, В 25 Э 15/02, 1972.931469 Фог С. Новас Составитель Техред А. Бой Тираж 1.082 сударственного м изобретений а, Ж - 35, Рауш тент, г. УжгороВНИИПИ Гопо дела113035, Москв Филиал ППП Па Редактор Л. Пчелинская Заказ 3552 И 8 омитета откры кая на д,ул. П
СмотретьЗаявка
3007258, 17.10.1980
ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ ЛЕНИНГРАДСКОГО ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА ИМ. М. И. КАЛИНИНА
АВЕТИКОВ БОРИС ГРИГОРЬЕВИЧ, ГРУЗДЕВ СТАНИСЛАВ ВЯЧЕСЛАВОВИЧ, КОРЫТКО ОЛЕГ БОРИСОВИЧ, САВИН ВИКТОР ГЕОРГИЕВИЧ, ТРЕСС КАЛЕВ ЮГАНОВИЧ
МПК / Метки
МПК: B25J 17/00
Метки: запястье, манипулятора
Опубликовано: 30.05.1982
Код ссылки
<a href="https://patents.su/3-931469-zapyaste-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Запястье манипулятора</a>
Универсальный шарнир карданного типа

Номер патента: 498421
Опубликовано: 05.01.1976
Автор: Стильве
МПК: F16C 11/00
Метки: карданного, типа, универсальный, шарнир
...заключены во втулку 2 и соединены с рабочими валами 3 при помощи конических штифтов 4, вставленных в сквозные отверстия втулок 2,корпусов 1 и валов 3. Соединение обоих корпусов выполнено в виде пластины 5, имеющей на концах уширенные округлые поверхности, Эти поверхности взаимодействуют с внутренней поверхностью втулок 2 и допускают дополнительное угловое смещение соединяемых валов в плоскости пластины. Пластины 5 расположены в полуцилиндрических вкладышах 6. Ребра 7 вкладышей входят в 0 соответствующие выточки, выполненные вкорпусах 1.Работа шарнира происходит следующим образом,При вращении рабочего вала 3 вращение 5 через штифт 4 передается корпусу 1 и черезвкладыш 6 - пластине 5, которая в обратном порядке передает вращение другому...
Универсальный шарнир карданного типа

Номер патента: 804898
Опубликовано: 15.02.1981
Авторы: Липилов, Лысенко, Мовшович, Стильве
МПК: F16C 11/06
Метки: карданного, типа, универсальный, шарнир
...3 расположена в полуцилиндрических вкладышах 4, которые входят в соответствующие выточки, выполненные в корпусах 1.5Один фасонный корпус 1 шарнира со втулкой 2 соединен с концом ведущего вала редуктора 5 одним длинным коническим штифтом 6, а другой Фасонный корпус 1 со втулкой 2 соединен с пустотелым ведомым концом вала 7, 1 О например валка 8 прокатной клети 9, двумя соосно установленными укороченными коническими штифтами 10, выполненными с канавками 11, которые образуют сечения, разрушающиеся при 1% возрастании нагрузок выше допустимого значения. На поверхности ведомого вала 7 в зоне прохождения конических штифтов 10 выполнена кольцевая проточка 12. 26Работа шарнира происходит следующим образом.При вращении ведущего вала 13...
Стыковочное устройство преимущественно для соединения сменных схватов с рукой манипулятора

Номер патента: 1748991
Опубликовано: 23.07.1992
МПК: B23Q 3/157, B25J 15/04
Метки: манипулятора, преимущественно, рукой, сменных, соединения, стыковочное, схватов
...пружиной 31 сжатия, На рамке -дая втулку 25 для последующего поворота, 29 закреплены тормозные накладки 32 (на- В заключительной фазе перемещения торец пример, из резины) с возмокностью контак- втулки 8 упирается в верхнюю поверхность та с выступающими за наружную 15 буртика 14 схвата 13 и дальнейшее движеповерхность корпуса 1 выгтупами зубьев 27 ние вниз прекращается. При этом хвостовик втулки 25, снабженными в месте контакта с 12 устанавливается в посадочном гнезде 11 накладками 32 поверхностью с повышен- устройства, пальцы 38 - в верхней части ным коэффициентом трения, например на- байонетных пазов 26, а штырь 3 оказывает- сечкой 33. На рамке 29 закреплены также 20 ся полностью утопленным в осевом отвертяги 34, проходящие через...
Подшипниковый узел для шарниров карданных валов

Номер патента: 661170
Опубликовано: 05.05.1979
Авторы: Кругличенко, Родзевич, Сахаров, Чапала
МПК: F16C 11/06
Метки: валов, карданных, подшипниковый, узел, шарниров
...- рую 1 цее наружной поверхностью с гофрированной втулкой 4, установленной в корпусе 5. Втулка 4 поджата в осевом направлении с помощью гайки 6 с резьбой. Корпус 5 встановлен в проушину 7 фланца вилки 8 и имеет уплотнение 9. Кольцо 3 выполнено со сквозным разрезом 10, плоскость которого проходит по оси цапфы 2 крестовинььПодшипниковый узел работает следующим образом.При сборке подшипникового узла гофрированная втулка 4 и разрезное кольцо 3 монтируются с достаточно большим и удобным для сборки радиальным зазором. С помощью гайки 6 гофрированную втулку 4 поджимают в осевом направлении, отчего ее диаметр Р уменьшается. При этом стягивается разрезное кольцо 3. Диаметр Р дорожки качения уменынается, что приводит к уменыпенню радиа,1...
Задающий механизм манипулятора

Номер патента: 547337
Опубликовано: 25.02.1977
Авторы: Абезгауз, Вайнсон, Кочетов, Найда, Павлов, Рейфман, Сурин
МПК: B25J 13/02
Метки: задающий, манипулятора, механизм
...звена 7 под углом 45 косям 33 и 34 можно получить еще четырекоманды.Величина перемещения элементов исполнительного механизма манипулятора будет на фиг. 3 - разрез А-А на фиг. 1;нафиг,4- разрез Б-Б на фиг. 1.Задающий механизм манипулятора состоит из рукоятки 1 управления, трех последовательно соединенных карданных подвесок ф и системы, например, астатического управления, выполненной из трех идентичных переключателей 2, 3, 4.Рукоятка 1 размещена на стержне 5,соединяющем внутреннее звено 6 первой карданной подвески с рабочим звеном 7 задающего устройства, Расстояние отрукоятки 1 до плоскости пересечения осей 8 и 9 первой карданной подвески выбирается таким образом, что 5 бы шарнир запястного сустава операторапри захвате рукоятки 1...
Предыдущий патент: Захват промышленного робота
Следующий патент: Приспособление для резки листовых материалов
Случайный патент: Насадка гребного винта