B25J — Манипуляторы; камеры, оборудованные манипуляторами
Манипулятор

Номер патента: 631328
Опубликовано: 05.11.1978
Авторы: Бондаренко, Загребельный, Шевченко
МПК: B25J 9/00
Метки: манипулятор
...в нем устанавливать изделия бопьшой длины, инструмент и т, д.Целью изобретения является расширение технологических воэможностей,координате Х, вертикальную направляющую3 с приводом 4 перемешения, руки по координате Я, руку 5 с приводом 6 перемещения руки по координате 3. На одномконце руки расположен привод 7 вращенияруки, а на другом - кронштейн 8, Наклондержателя 9 рабочего органа 10 (например, горелки с электродом) осушествляется приводом 11, вал которого через зубчатую передачу 12 связан с сектором 13,смонтированным в кронштейне и перемещающимся в направляющих 14,мости изменения угла наклона рабочегооргана по отношению к рабочей поверхности включается привод 11, который череззубчатую передачу 12 перемещает сектор13 в...
Манипулятор для монтажно-сборочных работ

Номер патента: 631329
Опубликовано: 05.11.1978
Автор: Баландов
МПК: B25J 13/00
Метки: манипулятор, монтажно-сборочных, работ
...13 насоса 14, а крайние пояса золотника 9- магистралью 15 со спивным баком. Прос транство между верхним и средним поясом золотника 9 соединено трубопроводом с верхней полостью гидроцилиндра 1, а пространство между нижним и средним поясом золотника 9 трубопроводом - с нижней частью гидроцилиндра 1. На фиг, 2 показан, один иэ вариантов применения манипулятора, на котором установлен рабочий ин струмент 16 для выполнения сверлильных работ.30Манипулятор работает следующим образом.Оператор Одной рукой поддерживает за рукоятку рабочий инструмент 16, а другой рукой воздействует на рукоятку 8 управления для перемещения рабочего инструмента 18 в необходимое. положение. При этом сила воздействии оператора на рукоятку 8 управления проходит...
Схват промышленного робота

Номер патента: 631330
Опубликовано: 05.11.1978
Автор: Гуслиц
МПК: B25J 15/00
Метки: промышленного, робота, схват
...механизма, например, кулачок 3 смон тирован на опоре 1. С ним контактируют ролики 4, установленные на качающихся толкателях 5, несущих зажимные губки и имеющих опоры вращения в корпусе 6. Снловое замыкание толкателей 5 на кулачках3 осуществляется пружинами растяжения7 Профиль кулачкаобеспечивает равномерВое сведение губок и опоры 1 к центрусхвата. Изделие 8 помещается между торцом опоры 1 и рабочими поверхностями йзажимных губок,Схват промышленного робота работаетследующим образом,Захват изделия 8 осуществляется пере 46 мещением,штока 2, опоры 1 с кулачками Э в направлении изделия 8. При этом качающиеся толкатели. 5 взаимодействуют через ролики 4 с кулачками Д и рабочие поверхности зажимных губок также пере мешаются в направлении...
Манипулятор

Номер патента: 632563
Опубликовано: 15.11.1978
Автор: Калиниченко
МПК: B25J 11/00
Метки: манипулятор
...и захвата в нужные моменты.Цель изобретения - упрощение конструкции манипулятора.Для этого рука состоит из двухштанг, укрепленных с помощью шарнира в пазу приводного вала, причемпаз выполнен профильным и снабжен всуженной части фиксаторами, например шариковыми, а шарнир представляет собой три сферических тела, взаимодействующих с лунками, выполненнымИ в пазу приводного вала и наконцах штанг, причем одно иэ них(сферических тел) подпружинено.На Фиг. 1 показан манипулятор вположении, соответствущцем моменту оложении штанги 2 усительно вала так, как3, и раэдвинуты на ол. Валу 1 сообщается вижение в направлении иг. 3). Штанги 2 вмес6325 б 3те с валом 1 поворачиваются до упора о площадку 9. (см, фиг, 4), так что деталь оказывается между...
Схват манипулятора

Номер патента: 632564
Опубликовано: 15.11.1978
МПК: B25J 15/00
Метки: манипулятора, схват
...с присос Изобретение относитнике, а именно к констманипуляторов и другихных устройств, предназтранспортировки предмегеометрической формы.Известно груэозахваво, содержащее корпус,сивером, на котором шалены губки с присоскамиперемещения губок, приподключены через ресивку вакуума 1) Нн чертеже представлен предлагаемый схват манипулятораСхват содержит корпус 1, в которомподвижно установлена рейка 2,введен ная в зацепление с зубчатыми сектораМи губок 3. На каждой губке подвижНо установлена обойма 4, снабженная присоской 5 с отверстием. На губке 3 напротив отверстия присоски 5 устаг 1 О новлен запорный клапан б.Схват работает следующим образом.После позиционирования относитель.Но объекта губки 3 под действием рейки 2 начинают сходиться, и...
Систма управления дистанционным манипулятором

Номер патента: 633725
Опубликовано: 25.11.1978
Авторы: Афонин, Письменный
МПК: B25J 13/00
Метки: дистанционным, манипулятором, систма
...исполнительный ме ханизм.Недостатком указанной системы являются ее низкие точность и быстродействие, обусловленные отсутствием автоматического ВЛЕНИЯ ДИСТАНЦИОННЫМ ТОРОМ переключения с позиционного на скоростнои способы управления и обратно.Целью изобретения является повышение быстродействия и точности системы.Сущность изобретения состоит в том, что система управления дистанционным манипулятором содержит блок пороговых элементов и блок нелинейных преобразователей, каждый выход которого подключен к соответствующему входу вычислительного устройства, каждый выход задающего органа соединен с соответствующими входами блока нелинейных преобразователей и блока пороговых элементов, первый выход которого подключен к одним из входов блока...
Схват манипулятора

Номер патента: 633726
Опубликовано: 25.11.1978
Авторы: Жальмов, Исупов, Сентяков
МПК: B25J 15/00
Метки: манипулятора, схват
...канал 16 пневмолинии 17 соединен с полостью 19 блока 20 сравнения.В полость 21 блока 20 сравнения по пневмолинии 22 поступает сигнал от блока управления (на чертеже не пока" зан). В полости 21 расположена пружина 23, которая обеспечивает при отсут" ствии сигнала от блока управления крайнее нижнее положение подвижной части схвата.Рука 12 манипулятора перемещается в зону загрузки, при этом подвижная губка 2 находится в крайнем верхнем положении. После того, как ось схва" та совместится с осью заготовкит подвижчая губка 2 перемещается вниз до упора и происходит зажим детали. С помощью струйного датчика 14,измеряют63372 б формула изобретения ип18 Ражип ставнтель В.ушакохред С.Беца тор Д.МельниченкоНОВР Корре Редактор В.Дибобес 80Совета...
Устройство для позиционного управления роботом манипулятором

Номер патента: 636076
Опубликовано: 05.12.1978
Авторы: Гладштейн, Сорока, Фадеев
МПК: B25J 9/00
Метки: манипулятором, позиционного, роботом
...выхода элемента 5 поступают на информационный вход блока 6, где хранятся для формирования экстраполируюгцей траектории. На (п+ 1) -м тактовом импульсе элемент 5 произведет сравнение информационного сигнала от датчика и информационного сигнала сформированного экстраполятором 6 по поступившим на него ранее п информационным сигналам. Гсли разность этих двух сигналов по модулю не превышает заданную величину, то с логического выхода элемента 5 на вход блока 11 синхронизации йоступит сигнал, определяющий последующую работу устройства. На реверсивный счетчик О по каналу управления от блока 11 синхронизации поступит импульс, который запи 30 35 40 45 50 55 шет в него единицу. По сигналу управления в экстраполятор 6 будет записана информация о...
Вакуумный схват

Номер патента: 637248
Опубликовано: 15.12.1978
Авторы: Михеев, Пашков, Храпоничев
МПК: B25J 15/06
...вертикальнойплоскости, тяга 6 и угольник 7. С водилом 4 н корпусом 1 шарнирно соединена 15добавочная тяга 8. В отверстие горизонтальной части угольника 7 вставлена ось9, на которой с помощью фиксатора 10и гайки 11 крепится подвеска, включающая хомут 12, в котором расположены В две параллельные штанги 13, На концахштанг 13 расположены хомуты 14 с осями 15 с закрепленными в них с помощьюфиксаторов 16 гайки 17 штангамн 18,на которых с помощью раэрезных зажимов19 закреплены присоски 20. Присоски 20связаны с ажектором, например, с помощью гибких труб (на фигурах не показаны),Схват работает следующим образом.Для захвата детали присосками сжатыйвоздух подается через сверление в корпусе Х в эжектор 2. При атом ажекторомсоздается необходимое на...
Схват промышленного робота

Номер патента: 638462
Опубликовано: 25.12.1978
Авторы: Ермаков, Михеев, Саватеев
МПК: B25J 15/02
Метки: промышленного, робота, схват
...между губками, а каждая губка установлена на одной из реек с возможностью регулировки ее положения нв этой рейке.На чертеже изображена принципиальная схема схввта промышленного робота,Схват промышленного робота состоит из корпуса 1, в котором смонтировано зубчатое колесо 2, находящееся в зацеплении с рейками 3 и 4. На рейке 3 установлена губка 5, а на рейке 4-губка 6, Губка 6 может поступательно перемешать ся по рейке 4 и стопориться гайками 7. Ка рейке 4 между губкой 5 и регулировочными элементами 8 установлена пружина сжатия 9638462 Составитель В. ПавловРедактор Л. Народная ТехредН, Бабурка Корректор А, Власенко Заказ 7195/10 Тираж 1080 ПодписноеЦНИИПИ Государственного комитета Совета Министров СССРпо делам изобретений и...
Манипулятор

Номер патента: 639696
Опубликовано: 30.12.1978
Автор: Фарберов
МПК: B25J 3/00
Метки: манипулятор
...имеет консольный конец, на который опирается уцруьий элемент 7, помещенный во избежацце продольного изгиба в стакан 8. Уравновешцва ющее устройство имеет привод, содержащий исполнительный двигатель 9, необратимый редуктор 10, кццематцчсскц связанный со стаканом, и блок измерений отклонений вертикальных звеньев, выполненный 20 в виде датчиков 11 и 12, выходные осц которых кинематцческц соединены с выходной шестерней редуктора ц с шарниром вертикального звена управляющего органа соответственно. Прц этом обмотка уп равлеция исполнительного двигателя электрически соединена с блоком измерений.Манипулирование вертикальными звеньямц управляющего и исполнительного органов, осуществляемое оператором, сопро вождается увеличением илц умец...
Привод манипулятора

Номер патента: 639697
Опубликовано: 30.12.1978
Автор: Фарберов
МПК: B25J 3/02
Метки: манипулятора, привод
...5 передачи, а другой --к управляемо;у звену 6.Пр 1 вод работаст с,7 сду 10 щ 11 м Образо).При подъеме управляемого звена 6 безпредмета в захвате ввиду компенсации не уравновсшсннь)х сил веса звена за счетпрсдваритсльнсго растяжения упругого элемента весь момент двигателя трацсформирус;ся по цепи иаимсн шсго сопротивления М , - Магде,т 1 , - момент двигателя;20 Л - момент сопротивления звена 6.При опускании звена без предмета момент двигателя меняет знак и передастся по той же цспи.Прн захватс какого-нибудь предмета и 25 ПО;1 ачс ко.вид на двнГатель пач 11 наетс 5подъем звспа с предметом до тсх пор, пока .,н,. .т от:",оса 111 сдмста относите,7 но ОсиР:ттЧ та РС С, 1 10;С 1 701 аСи , .;).р ",1.с,1 ч.1 Г.1101 та От все, прсд.3 1:, .; а,...
Способ управления манипулятором

Номер патента: 639698
Опубликовано: 30.12.1978
МПК: B25J 9/00
Метки: манипулятором
...предлагаемого способа.Устройство для реализации способа со держит несколько манипуляторов 1, схваты которых удерживают предмет 2, и устройство управления приводами каждого манипулятора, например программное или вычислительное устройство 3, необходимое 15 для формирования сигналов управления наприводы 4, размещенные в шарнирах каждого манипуляторд 1.11 риводы соединены с устройсизмерения моментов сопротивле20 нирах манипулятора, причем ус 5(датчки) электрически связанычателем б режимов работы пр оустройства.Управление движениями осуществляется 25 следующим образом.Для перемещения манипулятордми 1предмета 2 программное устройство 3 фори 1)ует закон движеня, кото 1 зы От 1 зао вается приводами 4, Из-за ошибок, кот ЗО всегда неизбежны при...
Устройство для управления дистанционным манипулятором

Номер патента: 639699
Опубликовано: 30.12.1978
Авторы: Березкин, Григалюк, Мирошникова, Суслов
МПК: B25J 13/00
Метки: дистанционным, манипулятором
...5, упругий элемент 6, датчик 7 момента,датчик 8 угла задающего органа, первыйсумматор 9, усилитель 10, электрогидроуси 6396995 О 15 20 25 зч 35 литсль 11, гидропривод 12 и датчик 13 давления, датчик 14 угла исполнительного органа, второй сумматор 15, корректирующий блок 16.Устройство работает следующим образом.Оператор 1, прикладывая силогос во- дейстие к звену 2, деформирует упругий элемент 6. Деформация упругого элемента 6, пропорциональная разности угловых положений звена 2 и гыходюго вала электро- привода 5 (а - а.,), замеряется датчиком 7 момента, выходной сигнал которого подается на вход первого сумматора 9 и корректирующий блок 16. На другой вход сумматора 9 поступает сигнал датчика 13 далспия, пропорциональный нагрузке...
Захват промышленного робота

Номер патента: 639700
Опубликовано: 30.12.1978
Авторы: Магид, Рабинович, Флейтман
МПК: B25J 15/00
Метки: захват, промышленного, робота
...по обе стороны от тягово.1 ленты 3 расположены пневматические камеры 5 с силовыми соплами 6 и разгрузочными отверстиями 7. Изделие 8 поджимается губками 2 к базирующему элементу 9.Захват работает следующим образом.Б исходном состоянии губки 2 под действием пружин 4 выдвинуты вперед. После подачи изделия 8 до упора в базирующий элемент 9, в каждое силовое сопло подают сжатый воздух. Г 1 ри этом лента 3 изгибается в поперечном направлении под действием струи сжатого воздуха и заполняет пневматическую камеру 5, образуя петлю, Обра:-,ованнс петли сопровождается перемещением конца ленты 3 и связанной с ней губки 2, сжнмаю 1 цей пру ж 11 ну 4. Одноврсъ 1 енно перемещаемые гуоки 2 фиксируют изделие 8, подъкиъ 1 ая сГО к базнру 10 ш,еъ 1 у элеъ...
Захват манипулятора

Номер патента: 639701
Опубликовано: 30.12.1978
Автор: Шабайкович
МПК: B25J 15/00
Метки: захват, манипулятора
...кольцо 17, и верхней крышки 18, жестко при 1 среплснной к одной из полуобойм. 11 о внутренней сферичсско поверхности Оооимы установлены три сухаря 19, разжимаемые пружинами 20, к которым прикреплены смешые губки 21, В последних устанавливается захватываемая деталь 22. Ниже корпуса располоя;ен цеитрирующий механизм, например, для деталей типа валов и втулок, выполненныи из призмы 23 и прижима 24, при 639701крспляемый либо к корпусу 1, либо на;одящийся на отдельной позиции.Захват манипулятора работает следующим образом.Захватываемая деталь 22 захватывается сменными губками 21 и центрируется призмой 23 и прижимом 24 по сопрягаемой поверхности, В зависимости от величин погрешностей происходит необходимый поворот сухаря 19 и...
Система управления электрогидравлическим манипулятором

Номер патента: 640841
Опубликовано: 05.01.1979
Автор: Илюхин
МПК: B25J 13/00
Метки: манипулятором, электрогидравлическим
...потребляемого расхода 11; Я.и Я, - сигналы допустимых уровней потребляемого расхода; л - Выходной сигнал блока Система управления манипулятором работает следующим образом. Если сигналЯдатчика потребляемого расхода 11 превысит .сумму сигналов Я,РР Я) на выходах блока деления 28 и датчика эталонного сигнала 21, то первый пороговый элемент 13выдаст сигнал К переключения ключа 6. ЭЕввызовет ограничение входного сигнала 1.2золотцикового гидрораспределнтеля 2 с электрогндравлическнм управлением и уменьиение расхода, потребляемого следящим приводом от источника энергии. 1 хак только сигнал Я станет меньше Я, +Я, восстанавливается прежняя величина сигнала 1 Р.Функциональный преобразователь 14 воспроизводит зависимость плеча действия силы К,...
Манипулятор

Номер патента: 642149
Опубликовано: 15.01.1979
Авторы: Гублер, Колявкин, Михайлов, Степанов
МПК: B25J 11/00
Метки: манипулятор
...из двух параллелограммных механизмов, образованных рычагами 13-16, звеньями 8 и 17 икороткой колонной 18, смонтированной на основании 19, имеющем привод поворота колонны 18 вокруг вертикальной оси. К рычагам 14 и 16 прикреплеНы шкивы 20 и 21, связанные стальной,642149 Формула изобретения ЦНИИПИ Заказ 7653/15 Тираж ЮЕО Подписное Филиал ППП Патент, г.ужгород, ул.Проектная,4 лентой. На колонне 18 смонтировангидроцилиндр 22, воздействующий нарычаг 16.Ианипулятор работает следующим образом,По сигналу с пульта управления илипо сигналу программирующего устройства подается давление в гидроцилиндр12. Если необходимо, например, уменьшить вылет захвата 1, то гидроцилиндр12 выдвигает Шток и, тем самым, увеличивает угол наклона рычагов 7 и бк...
Захват манипулятора

Номер патента: 642150
Опубликовано: 15.01.1979
Авторы: Белоусов, Васенин, Гвоздев
МПК: B25J 15/00
Метки: захват, манипулятора
...по длине захватываемой детали 1 и соединенных через дифференциальный рычаг 2 с приводным цилиндром 3.каждое захватное устройство имеет подвижный в направляющей, расположен ной вдоль .корпуса, полэун 4, шарнирно прикрепленные к нему рычаги 5 с зажимными губкаии, например с самоустанавливающимися призмами б, на концах, закрепленных на корпусе кривошипы 7, которые присоединены к рычагам в точках 6 . Кривошипы через тяги 8, ползуны 9 и серьги 10 присоединены к рычагу 2.Захват работает следующимПри движении штока цилиндр (на чертеже вправо) рычаги 5 Ья встречно и зажимают деталь Мами ба642150 Формула изобретения а "г1 Составитель В.ПавлТехред И. Петко Г,Иоэжечкова Редакт ректор С,ШекМар акаэ 7 653/15 Тираж 1 ОУОЦНИИПИ...
Захват манипулятора

Номер патента: 642151
Опубликовано: 15.01.1979
Авторы: Бабарин, Владов, Данилевский
МПК: B25J 15/00
Метки: захват, манипулятора
...в закрепленный неподвижно на конце штока клин 8. В пазах кулисы б установлены поджатые пружинами 9 сухари 10, в которые вставлены оси 11 роликов 12. Оси установлены на концах рычагов 13. Каждый рычаг входит в состав механизма пантографа, который содержит также рычаги 14, 15 и 16, Рычаги 13 и 14 шарнирно связаны между собой, рычаги 15 и 16 шарнирно связаны с рычагами 14 и 13 соответственно, а также осью 17 - с корпусом 4, На конце рычага 14 в шарнире 18 установлена губка 19, поддер642151 ЦНИИП каз 7 5 Тираж И писно атент, г.ужгород, ул,Проектная,4 илиал ПП живаемая пружиной 20. В исходном по- ложении центры осей 11 и 17 и шарнира 18 лежат на прямой параллельной продольной Оси руки 1 манипулятора.Захват работает следующим образом.При...
Шарнирное соединение звеньев манипулятора

Номер патента: 293432
Опубликовано: 25.01.1979
Автор: Виноградов
МПК: B25J 17/00
Метки: звеньев, манипулятора, соединение, шарнирное
...На каждое движение захватаустановлено по две соосных пары колесс одинаковыми диаметрами. Каждое изних жестко соединено с соосным коническим колесом, сцепляющимся с коническим колесом, которое закрепленона валу, передающем соответствующеедвижение захвату.На чертеже изображен шарнир кисти,осевой разрез, Он имеет локоть 1 сосью 2, соединенный с кистью 3, имеющей ось 4, .с помощью водил 5 и 6. Кдеталям, участвующим в изгибе кисти3, относятся приводной вал 7, конифф ческое колесо 8 и конический сектор9, свободно сидящий на оси 2 и скрепленный с водилом 6 штифтом 10.Вращение захвата осуществляетсяследующей цепью: приводной вал 11, 5 коническое зубчатое колесо 12, блокиконического и цилиндрического колес13 и 14, свободно сидящие на оси...
Манипулятор

Номер патента: 643320
Опубликовано: 25.01.1979
Авторы: Антоненко, Буров, Диденко, Матяш, Симаков
МПК: B25J 11/00
Метки: манипулятор
...содержитзакрепленными на нем нап2, соединенный с шарниромправляющих 2 смонтированный орган 4, выполненный вйизма параллелоэ рамма. Притирован накорпусе 1 и свя643320 ризонтальное перемещение осуществляется вручную,3нительиым органом 4 передаточным механизмом, выполненным в виде кривощипа 6 и двуплечего рычага 7, связанных между собой посредством ползуна8 и направляющей 9, расположенной нарычаге 7, причем, одно из плеч рычагашарнирно установлено на корпусе 1, аЪторое на исполнительном органее 4,Задающий орган 10 смонтирован на хоппе исполнительного органа.Манипулятор работает следующимобразом.Закрепив груз (заготовку), операторзадающим органом 10 включает привод 5 на заданное по направлению вверхвниз вертикальное перемещение...
Стенд-тренажер для оценки качества манипуляторных систем

Номер патента: 643321
Опубликовано: 25.01.1979
Автор: Слуцкий
МПК: B25J 11/00
Метки: качества, манипуляторных, оценки, систем, стенд-тренажер
...фиксации углов поворота составляющих их звен ев. Кроме того, на птангах размещены средства .8 фиксации относительного расположения их частей, Манипулятор 9 работа ет совместно с пультом 2 управления,. Пульт 2 имеет кнопку 10 включения стенда и кнопку 11 отключения, коммутационную панель 12 и электросекундомер 13, 15При подготовке стенда к работе,1вначале выбираются координаты точек пространственной траектории в проекции на плоскость ХО, т. е, выбираются соответствующие телескопические штанги 20 1. Затем для каждой из выбранных .штанг задается, путем их выдвижения на требуемую величину, координата Х. В этом положении звенья каждой штанги 1 фиксируются цри помощи 1 средств 8, Неиспользуемые штанги 1 задвигаются. Далее производится...
Дискретное чувствительное поле для информационной системы очувствленного робота

Номер патента: 643322
Опубликовано: 25.01.1979
Авторы: Белянин, Кобринский, Козякин, Корендясев, Розин, Саламандра, Соколовский
МПК: B25J 13/02
Метки: дискретное, информационной, очувствленного, поле, робота, системы, чувствительное
...закрыта защитным протек тором 9.Устройство работает слепуюшим об643322 3П ер дмет, с которым манипулирует робот, располагается на поверхности образованной защитным протектором 9 и стенками каркаса 7, Электрический зондирующий импульс поступает на обкладки 5 2,и 3 чувствительного элемента 1 по сигнальной шине б и общей буцине 6 и возбуждает ультразвуковые колебания элемента 1, которые поступают (вводят ся) в измеряемую деталь, Через время, 10 определяемое высотой детали в данной бточке, чувствительный элемент 1 воз уждается ответным эхо импульсом Оъ раженным от верхней поверхности детали.Таким бщм образом, временной интервал, на чало которого определяется поступлением зондирующего импульса, а конеппоявлением эхо-импульса, является...
Устройство вертикального перемещения

Номер патента: 643323
Опубликовано: 25.01.1979
МПК: B25J 17/00
Метки: вертикального, перемещения
...во вертикального перемещения снв О направляющими и блоками, один и торых установлен непосредственно основатпти, а второй - в смонтиров на том же основании напрввляющ находится в контакте с кулвчково 5 тью барабана, причем один нэ тро. связан с подвижной секцией через блоки. Нв фиг. 1 иэобра вертикального иерем разрез; на фиг. 2 -фиг. 1. Устройство содержи осно подвижнуюсекцию 2643323 тавитель В. Шиянред С, Мигай Корректор Т Редактор Т. Клюкина о Заказ 7907/1 ираж 4 СЬ.О Подписное Гоусдарственного комитета СССР по делам изобретений и открытий ква, Ж, Раушская наб;, д. 4/5 113035,Мо Филиал ППП Патент, г, Ужгород, ул. Проектная, 4 гайка. На основании 1 установлен пружинный уравновешивающий механизм, выполненный в виде двухтросового барабана...
Шаговая система программного управления многокоординатным манипулятором

Номер патента: 644617
Опубликовано: 30.01.1979
Автор: Шерстобитов
МПК: B25J 9/00
Метки: манипулятором, многокоординатным, программного, шаговая
...ИЛИ 3 на блок 5 записи и программа записывается на магнитную ленту блока памяти 1. Импульсы обратного перемещения поступают на вход первого элемента ИЛИ 3 непосредственно с датчика 10 и через первый элемент задержки 6, поэтому программа обратного перемещения записывается двойными смещенными на время задержки импульсами,В положении ключа 2 Работа считанные с магнитной ленты блока 1 памяти одиночные и двойные импульсы через блок 4 воспроизведения поступают на элементы формирования управляющих команд. При реализации программы обратного перемещения сдвоенные импульсы выделяются первым элементом И и вторым элементом 14 задержки при наличии сдвоенных импульсов на выходе первого элемента И 11 формируются одиночные импульсы, которые следуют...
Захватный механизм манипулятора

Номер патента: 647104
Опубликовано: 15.02.1979
Авторы: Зерний, Мальцевский, Мирошниченко, Семенов, Скородумов
МПК: B25J 15/00
Метки: захватный, манипулятора, механизм
...захватный механизм снабжен электромагнитами, попарно закрепленными на каждой из захватных губок, сердечник каждого электромагнита выполнен С-образным, ось обмотки каждого иэ электромагнитов расположена параллельно плоскости перемещения одной захватной губки относительно другой, а на сердечнике каждо го иэ электромагнитов закреплен дат 5.02.79. Бюллетень66нйков существенно не влияЬт на тяго"вой усилие элекгромагнита,"На койцах б сердечников 5"эакреплены датчики 7 контроляМИи/чия плос- .ких заготовок. На ннутренййх поверхностях захватных губок 1 и 2 закреплены резиновые прокладки 8 для уве"личения коэффициента трения между.планками захватываемой деталью" и захватиыми губками 1 и 2,;-."- - -фНа планках 3 закреплены концевойвыключатель 9...
Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей

Номер патента: 649566
Опубликовано: 28.02.1979
Автор: Зубов
МПК: B25J 9/00
Метки: захвата, манипулятор, поверхностей, ферромагнитных
...с помощью пружин 16 закручивания, надетых на неподвижно прикрепленные к корпусу 14 оси 17 и 18. Осн 17 и18 прикреплены к крайним магнитопроводам 12 и 13 с помощью подшишгиков 19. 05Пружина 16 одним концом касается корпуса 14, а другим - крайнего магнитопровода12 или 13.В вертикальном положении магнитопроводы 12 и 13 фиксируются силовым полем 10постоянного магнита.Манипулятор работает следующим образом.Для осуществления поиска детали рука 1располагается над ферромагнитной плоскостью 6 таким образом, чтобы она охватывала всю зону плоскости 6 с деталями. Приэтом силовая обмотка 4 электромагнита 3соединена с источником 8 переменного тока, в качестве которого используется, например, генератор высокой частоты. Пружины 16 находятся в...
Блок манипуляторов

Номер патента: 649567
Опубликовано: 28.02.1979
Авторы: Айзенкайд, Бураков, Вавилов, Ермолаев, Мангуби, Микотин, Тимофеев, Трифсик
МПК: B25J 11/00
Метки: блок, манипуляторов
...двусторонними приводами 23. Для упора кокилей и замыкания усилий при выталкивании отливок из их верхних частей силовыс плиты 19 снабжены упорными штангами 24, которые через кокили взаимодеиствуют с рычагами 21 и 22.С целью уменьшения габаритов блока манипуляторов, исключения использования гибких коммуникаций и сокращения количества подводящих рабочую жидкость каналов на верхних площадках кронштейнов 3 и 5 размещены блоки гидропанслей 25 и 26, соединенные с коллекторами 27 и 28 колонны 1 манипуляторов.Блок манипуляторов работает следующим образом.В исходном положении рычаги 21 и 22 удерживают кокили В и Г, головки манипуляторов подняты и находятся соответственно над заливочным устройством Д и кокильной машиной Е. По команде с...
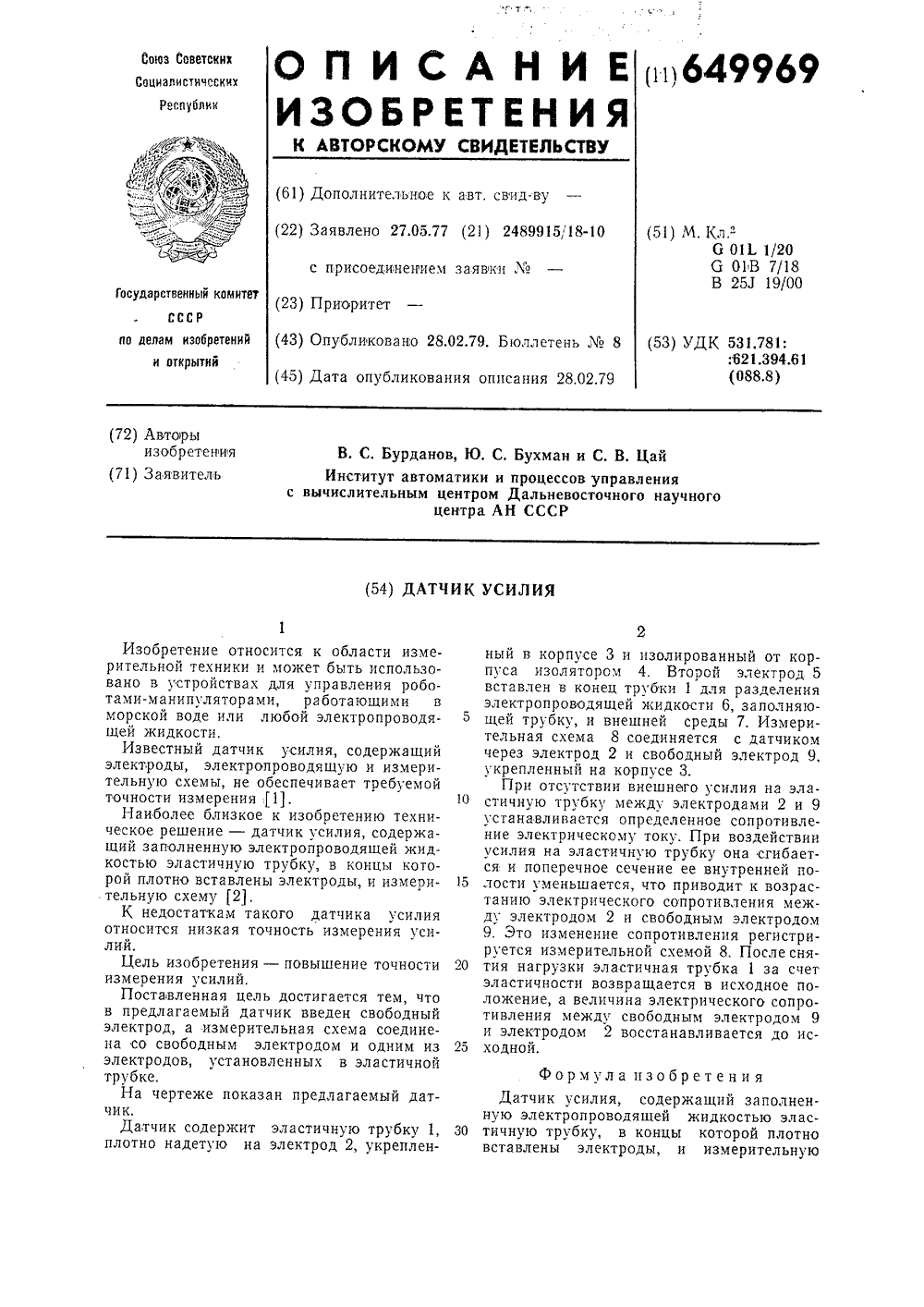
Датчик усилия
Номер патента: 649969
Опубликовано: 28.02.1979
МПК: B25J 19/00, G01B 7/16, G01L 1/20 ...
...усилий,Постановленная цель достигается тем, что в предлагаемый датчик введен свободный электрод, а измерительная схема соединена со свободным электродом и одним из 25 электродов, установленных в эластичной трубке.На чертеже показан предлагаемый датчик.Датчик содержит эплотно надетую на э ластичную трубку 1, 30лектрод 2, укрепленный в корпусе 3 и изолированный от корпуса изолятором 4. Второй электрод 5 вставлен в конец трубки 1 для разделения электропроводящей жидкости 6, заполняющей трубку, и внешней среды 7. Измерительная схема 8 соединяется с датчиком через электрод 2 и свободный электрод 9, укрепленный на корпусе 3.При отсутствии внешнего усилия на эластичную трубку между электродами 2 и 9 устанавливается определенное сопротивление...