B25J — Манипуляторы; камеры, оборудованные манипуляторами
Захватное устройство

Номер патента: 1563977
Опубликовано: 15.05.1990
Автор: Попов
МПК: B25J 15/00
Метки: захватное
...детали устройство подводится к патрону станка, охватывая деталь зажимными элементами; управляющее устройство робота, подавая напряжение на статор привода ротации 3, приводит во вращение якорь 19 с валом 8, который начинает вращаться в подшипниках 6 и 7 и в подшипниках 10, 11 вместе со втулкой 9. и зажимными элементами 13; управляющее устройство робота, связанное с управляющим устройством станка, регулируя напряжение на статоре 3 привода ротации, выравнивает число оборотов якоря 19 вала 8 и захватных элементов 13 со втулкой 9 и меняетполюсность напряжения постоянного тока на статоре 2 привода линейного перемещения, якорь 20 которого перемещается вместе с валом 8 и подшипниками 6, 7 и втулкой 5 по шлицам съемного корпуса 4, причем вал 8...
L-координатный механизм

Номер патента: 1563978
Опубликовано: 15.05.1990
Авторы: Глазунов, Дайч, Колискор, Модель, Рашоян, Федосеева, Чернов
МПК: B25J 11/00, B25J 17/00
Метки: l-координатный, механизм
...на ,фиг. - расчетная схема для определения положения подвижного звена.Ь-координатный пространственный механизм содержит основание 1, подвижное звено 2, которые соединяются с помощью сферических шарниров 3 ;шестью приводами 4 линейного переме)цения с регуляторами длины 5, а также измерителями 6 расстояния между шарнирами 3 основания 1 и шарнирами 3 подвижного звена 2.Механизмы, представленные на фиг.1-6, отличаются количеством точек основания 1, в которых размещаются Шарниры 3. Количество точек на основании 1 в этих механизмах изменяется от 3 до 6. Эти механизмы реализуют свою отличную от других структуру-координат.При управлении движением Ь-коор- ф динатных пространственных механизмов необходимо решать прямую и обратную задачу о...
Манипулятор

Номер патента: 1565674
Опубликовано: 23.05.1990
МПК: B25J 9/00
Метки: манипулятор
...1. Вицт 35 своими Кон я чс 51:э 1 Васт;3 Вд пори Н 5 38, Оорязукцеце ( корпусом 28 полости 39 и 40.1; йк 36 ц,)7 , ст;чов,1 ец В ко,) 1) с( поср(л(ВОМ процин 4111 цт; н цс ц цо. нсти 15 и6. 22 и 2;.30 и 31, я тк)кс НО,001 И Зс и 40 оляет(.51 посНл(твом коччуЯиий 2.ЪЬПпчг 53 Ор работ;: т л 1,) ющим образом.,ге 15 эс 1 х 1 я тс рузя л 13,1 с.Н 1. рябоОй жидкстц Г 0 е;етс 51, цд ри чср, полост 39 (с 1 иг. 2). Винт 35 ол В истцем .ЯВЛЕНИ 51 ц 1 ПориЕНЬ8 В НОГ)СТИ 3, П.рс- сИ 3(се 51 ЭЛСЭО (30 Ртсжм) .ГдКи 36 и 37 эяж 3 ьх рычагов 11, олця из которых имеет левую, я втрая правую резьбы, за счет взаимолействия с винтом 35 вращаются в разных направлениях, перемеиают соответствецно закрец ленные ня них зяжимцые рычаги 11. При этом груз...
Стенд для контроля перемещений промышленных роботов манипуляторов

Номер патента: 1565675
Опубликовано: 23.05.1990
Авторы: Карташов, Пашков, Погорелов
МПК: B25J 11/00, B25J 19/04
Метки: манипуляторов, перемещений, промышленных, роботов, стенд
...фотоприемника (фиг. 6), т. е. Происхолит захват пятном оптической оси фотоприемника с образованием постоянного контура слежения за положением этой оси.Поскольку быстролействие оптоэлектронной системы слежения значительно превышает быстродействие механической системы манипулятора, любые перемецеция манипулятора будут сопровождаться синхронным перемецецием пятна по экрану ЭЛТ 2. По мере устранения рассогласования осей пятна А и фотоприемника, значения 1.1 1)будут умецшшатшся до величины, пропорциональной координатам Х и У пятнафиг. 4), т. е. после захвата положения оси фотоприемника на пластинах 8 и 9 автоматически установятся новые значения 1 и 1, соответствующие координатам Х и У пятна на экране. Эти значения напряжения через цифровые...
Стенд для испытания манипуляторов

Номер патента: 1565676
Опубликовано: 23.05.1990
МПК: B25J 11/00
Метки: испытания, манипуляторов, стенд
...19 с последующим стопорецием втулки 18 прижимом 20. Соединение валика 14 с датч иком 21 угла поворота может быть осуществлено, например, муфтой 22. Возможны другие виды передачи перемещений. Ролики 8 (фиг. 3) создают призму для базирования барабана по винтовой поверхности и разнесены вдоль оси ца величину хода винтовой линии, пропорционально величине центрального угла призмы. Ролики 9, размещенные на рычаге 23, пружиной 24 прижимают барабан к роликам 8, что предотвращает заклинивание барабана при вращении без зазора. При перемещениях троса через фильеру 25 схватом манипулятора обеспечивается постоянный контакт ролика 16 с водилом 15. Усилие натяжения троса определяется заводом пружины 17. Таким образом, базирование барабана производитСя...
Манипулятор

Номер патента: 1565677
Опубликовано: 23.05.1990
Авторы: Бергер, Диневич, Коренчук, Моцьо
МПК: B25J 11/00
Метки: манипулятор
...работает следующим образом.При повороте выходного вала привода 3 осуществляется поворот всей установленной на Валу системы состоящей из ВОди ч 40 4, сателлитов, ползуна 9 и рейки 7 с исполнительным органом 8, так как водила 4 жестко закреплены на выходном валу с помощью ВинтОВ 11.При этом нижние сателлитные колеса 5 обкатываются вокруг неподвижного 45 центрального колеса 2, что приводит к вра 1 цению верхних колес 6, входян 1 их в зацепление с рейкой 7.Это вызывает дополнительное прямолинейное перемещение рейки 7 вдоль ползуна 9. В результате схваты исполнитель ного органа 8 перемешаются по незамкнутой криволинейной траектории.Форма этой траектории определяется параметром 1 - расстоянием от оси выходного вала привода 3 до рейки 7....
Устройство для управления манипулятором

Номер патента: 1565679
Опубликовано: 23.05.1990
Авторы: Березкин, Левшин, Суслов
МПК: B25J 13/00, B25J 3/00
Метки: манипулятором
...3 Г 1 од,ис гвисм у правляк)- ших си нагиВ с выхода интегратора 1, нсступаюгцих а первые входы суммато ров 7 и 2, э,ктроприво с 8 и электрогидроиривод 3 перемегцак)т соответственно задаюцийИсполнитсльный органы 5 и 12 со сксростьк, пропорциональной управляюцс му воздеис вию оператора на задающий си ан 12. Если при движении исполнительного орга 1;1 5 на него воздействует внс н яя н;: рузк, то вел янина этой нагрузки измсряетс я дат иком 6, ВыХОДНСй С.ИНсЛ КОТОРОГО КК" УИСГ На СУЬМатор 3, где сравнивсстсц 1 гнс)лом датцика ), Огвстствуксим у 1 равл 51 сцс во:действик) О;1 ератора , рс зульта) с этого на выход сумматора 13 формируется сигнал, пропорциональный сумме 1 естг нагр зка на иполнитльный орган 5 направ,сна В сторону двжснИ) и,и...
Задающее устройство для управления роботом-манипулятором

Номер патента: 1565680
Опубликовано: 23.05.1990
Авторы: Кихней, Лясота, Филаретов, Юрчик
МПК: B25J 13/02, B25J 19/00
Метки: задающее, роботом-манипулятором
...сроиствам (приводами) 15 роботаиз,уляторя О, В суставах которого усПи цлсць датчики6 .1(оложеция, сосд(Псцць . с Входом ЗВМ 4.:-:Я сзюцсс устройство работает следую 00 Р с 1 ЗОМ.рс,сцоложцч, что схват 9 необходимо (с ( мс стц Гь ц направлении ьсктора1. Дляо Оцсратор сначала (тпиецтируст стрелВ 11 ПРЯ Вл(с ни и, па Рс 1 ллсл ьном напЯВ. ,"С,.Ю ЖЕЛЯСМОО ДВИЖСЦИЯ (ВДОГ 1 Ь ВЕКТОРЯя ззт( и . 1 Вс,сс:ис м цотен циомет- Э 13 (ЗЯ (с(1 сЕс 1 СкорОГ И ) ИЗ НЗЧЗЛЬНОГ .И), (сКСгп":5 ЗЗДЗ(Т СКОРО(ГЬ ДВИЖ(.НИ 51 "хц;Г( 1; задацм:(з 1;ЗБлсниц. Возв)с 1 цсП(ТСЦЦИОМСТ;)ЯБ Нс(13,ЦНОЕ ПОЛО; 1(С С (: Ц(РЯ Г Р .(Г)Сл Рс( П(сс 1 СТ,;ВЦ Ж(.Ц ИЕ М Я -,1,; 5 ГО)ЯВр)1 цсцц с", резки Вокруг ссей 41 СсЦОТСЯ ДсГЧ ИКИ 0 И , ИНфОР. 5 я ц(згс 1...
Сборочно-захватное устройство

Номер патента: 1565681
Опубликовано: 23.05.1990
МПК: B25J 15/00
Метки: сборочно-захватное
...и соотношение длин коромысла 4 и поворотного рычага 5 выбраны таким образом, что обеспечивают прямолинейное перемещение зажимных губок 1. При шарнирных параллелограммах, каждый из которых образован зажимной губкой 1, поворотными рычагами 5 и 6 и ползуном 2, обеспечивают плоскопараллельное переме ще ние за жи м ных губок. За хватыва ние вала происходит при отключении привода 14. Необходимое усилие захватывания создает пружина 8,При переносе захваченного вала до позиции сборки для исключения нежелательных колебаний вала включают привод 14, который, деформируя упругие стержни 10 и 11, захватывает губками 12 зажимные губки 1, где размещается вал.При введении вала в отверстиях отключается привод 14 и за счет упругости стержней 10 и...
Стыковочное устройство

Номер патента: 1565682
Опубликовано: 23.05.1990
Автор: Кац
МПК: B25J 15/00
Метки: стыковочное
...9, снабженный штырем 20, установлен в кассете 21 на пальцах 22.Стыковочное устройство работает следующим образом.Манипулятор опускает стыковочное устройство на сменный рабочий орган 9, пальцы 13 базируют стыковочное устройство относительно него, упор 17 поджимается кассетой 21, толкатели 11 упираются в сменный орган 9. Переходной блок 2, опускаясь по неподвижному упору 17, вызывает поворот рычага 15 относительно оси 16 и скручивание пружины 18. Фиксатор 14 выводится из отверстия 19 корпуса 3, толкатели 11 поднимаются, сжимая пружины 12. Электроразьем 10 соединяется с ответной частью на рабочем органе 9. Рука манипулятора по команде системы управления поворачивает на заданный угол фланец относительно зафиксированного на рабочем органе 9...
Вакуумный захват

Номер патента: 1565683
Опубликовано: 23.05.1990
Автор: Ганжара
МПК: B25J 15/06
...на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.Вакуумный захват содержит корпус 1, на котором с помощью полого болта 2 установлена присоска 3 с эластичной манжетой 4 и амортизаторами 5. На корпусе 1 устанавливается съемная заглушка 6 со сменной вставкой 7 из пористого материала, предназначенная для снижения уровня шума. Вакуум в присоске 3 создается эжектором, связанным с источником сжатого воздуха посредством штуцера 8. Эжектор состоит из сопла 9, диффузора 10, эжекционной камеры 11 и сменной пластины 12. Для устранения утечек воздуха могут быть предусмотрены прокладки 13 - 16. Пластина 12 может быть выполнена в форме угольника.Вакуумный захват работает следующим образом. 4Между соплом 9 и диффузором 10...
Пневмовихревой захват

Номер патента: 1565684
Опубликовано: 23.05.1990
Авторы: Аксенов, Битюков, Попов
МПК: B25J 15/06
Метки: захват, пневмовихревой
...на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1,Захват состоит из цилиндрического корпуса 1, изготовленного в виде стакана, внутри которого установлена коническая Втулка 2, перфорированная тангенциальными отверстиями 3, расположенными на окружностях конуса. В корпусе 1 имеется отверстие 4 для подачи сжатого воздуха в кольцевую пневмокамеру 5, образованную его внутренней поверхностью и крышкой 6, в которой имеется отверстие 7 для ввода детали 8 в захватное устройство. В корпусевыполнена кольцевая щель 9 с внешним диаметром, равным внутреннему диаметру большего основания втулки 2. Пневмовихревой захват работает следующим образом.Для захвата детали 8 корпус 1 с конической втулкой 2 полностью или частично надевается на...
Вакуумный схват манипулятора

Номер патента: 1565685
Опубликовано: 23.05.1990
Авторы: Бросалин, Краснослободцев, Шаралапов
МПК: B25J 15/06
Метки: вакуумный, манипулятора, схват
...в электростатическом поле со стороныэлектрета на одноименно заряженную мембрану она переместится в крайнее нижнееположение. Схват манипулятора помещаютна поверхность транспортируемой деталии между ней и мембраной 2 образуется замкнутая камера с уплотнением в виде эластичного элемента 7. Затем изменяют полярностьподаваемого на мембрану 2 напряженияна противоположную (положительную), что50 формула изобретения 1. Вакуумный схват манипулятора, содержащий. корпус с эластичным элементом на его рабочем торце, вакуумобразующий элемент в виде мембраны, установленной в полости корпуса, и привод перемещения мембраны, отличающийся тем, что, с целью упрощения конструкции и повышения на 55 приводит к притяжению мембраны 2 поддействием кулоновских сил...
Манипулятор

Номер патента: 1565686
Опубликовано: 23.05.1990
Авторы: Гонохов, Итович, Кушманов, Кушманова, Сажко
МПК: B25J 18/00
Метки: манипулятор
...из элементов 25 криволинейной коробчатой формы, Два ближних к каркасу 5 элемента 25 соединены с горловиной 26 с уплотнительным элементом по сопрягаемом с каркасом 5 илй корпусом узла ротацни 7 отверстию. Элементы 26 кожуха 24 могут перемещаться относительно один другого по дуге окружности до упора стенок 27 смежных элементов 25. Ближние к платформе 3 элементы 25 закреплены жестко на щеках 20.Манипулятор снабжен аппаратурой и средствами управления, следящими приводами, зрительным сенсором и может работать по программе с дистанционно-автоматическим (или копирующим) управлением.Манипулятор работает следующим образом.После перемещения ходовой части манипулятора (не показана) непосредственно в зону работы с помощью зрительного...
Тактильный датчик

Номер патента: 1565687
Опубликовано: 23.05.1990
Авторы: Андарало, Прокошин, Шепелевич, Ярмолович
МПК: B25J 19/02
Метки: датчик, тактильный
...8 между осями стержней 2(фиг. 4) для обеспечения высокой чувствительности и разрешающей способности датчика должно быть больше величины зазора между пластинами 4 и 5.5Датчик работает следующим образом.При каком-либо внешнем воздействиина стержни 2 последние перемещаются в осевом направлении относительно корпуса 1,10 а также пластин 4 и 5. Эти перемещениявызывают соответствующее перераспределение магнитного потока и изменение индукции магнитного поля в зазоре между пластиной 5 и стержнями 2, Изменение15 индукции регистрируется матрицей элементов Холла 7, по сигналам которой производится идентификация внешнего воздеиствия, например, формы захватываемого обьекта.формула изобретенияТактильный датчик, содержащий немагнитный...
Беззазорный привод по меньшей мере для одной главной оси манипулятора

Номер патента: 1567129
Опубликовано: 23.05.1990
Автор: Эрнст
МПК: B25J 17/00, F16H 55/18
Метки: беззазорный, главной, манипулятора, меньшей, мере, одной, оси, привод
...стальной зубчатой ступени, Если использовать четырехступенчатую передачу, то третья ступень может быть выполнена в качестве стальной зубчатой передачи.Ведомое колесо 28 второй ступени 20 установлено в корпусе 32 через подшипник 33Соединенная с ведомым колесом 28 втулка 34 воздействует через зажимное приспособление 35 (фиг.З) на третью ступень 21, выполненную в качестве стальНой зубчатой передачи, например, с цилиндрическим зубчатым зацеплением. Для привода третьей ступени 21 предусмотрены две части 36 и 37 шестерни, которые выполнены с торсионной затяжкой друг относитель 5156/1 но друга. Они воздействуют на ведомое колесо 38, втулка 39 которого затянута через винтовое соединение 40 с втулкой 29 опоры стрелы 9. 1 ри этом колесо 38...
Уравновешенный манипулятор

Номер патента: 1567370
Опубликовано: 30.05.1990
Автор: Кордашенко
МПК: B25J 1/02, B25J 11/00
Метки: манипулятор, уравновешенный
...горизонтальных осей, имотя не.уравновепенные массы этих звеньев 1 и 2.Звено 1 может вращаться нд угол, больций180. (фиг. 2).11 ри нахождении звеня 1 в секторе 1(фиг, 2) имеют место положительные опрокилывающие моменты. Нри нахожлениизвена 1 в секторе 2 возникают мочецтыс противоположным знаком.Уравновешивание звена 1 при нахожлении его в секторе 1 при неподвижном звене 2происходит следующим образом.На кулачок 6 через промежуточный ролик действует пружина 8, созлавая момент,равный по величине (но с противополокным знаком) опрокилывающему моментузвена 1. Уравновешивание звена 1 при цеполвижцом звене 2 и при нахождении его в секторд( 2 (фИГ 2) ПрОИСХ(пнт От ВОЗЛЕй(ТВИЯ пружины 7 на кулачок 5 црез прочежуточ.ный ролик Кулачки 5 и 6...
Исполнительное устройство манипулятора

Номер патента: 1569219
Опубликовано: 07.06.1990
Автор: Гвоздев
МПК: B25J 1/02
Метки: исполнительное, манипулятора
...2 входной пары шарнирного параллелограмма, а второй и четвертый блоки связан со звеньями 9 выходной пары, которые связаны с выходным звеном 10, например захватным органом, и образуют второй шар " нирный параллелограмм. 55Устройство работает следующим образом. При повороте вала 4 от приводного двигателя вращаются в ту же сторону .-енья 2 входной пары шарнирного пар,ллелограмма, а вместе с ними - п-.рвый и третий блоки зубчатых колес1 г, 3), второй и четвертый блоки зу .;атых колес вращаются в противо- полы.ную сторону, что приводит к вращению звеньев 9 выходного эве 10. При этом зубчатые колеса, , а положенные на смежных валах, причтельно прижимаются пружинами 7 таким образом, что их пары, установленные на одном валу, стремятся...
Манипулятор

Номер патента: 1569220
Опубликовано: 07.06.1990
Автор: Ющенко
МПК: B25J 3/02, B66C 23/14
Метки: манипулятор
...проушины 13 - 20. Крайнее звено 2но с шарниром 11 проушинами 21, х;айнее звено 3 соединено с шарниром 12 проушинами 22. Среднее звено 4 свободными концами стержней Ч-образного профиля соединено с шарниром 9 проушинами 23. Рабочий орган, в данном случае захват 24, выполненный из двух захватных элементов, прикреплен к соединительным элементам 7 и 8. На раме 1 установлен привод 25, имеющий гибкий орган 26, связанный со средним звеном 4. Крайнее звено 2 соединено с рамой 1 шарнирами 27 и 28, крайнее звено 3 - шарнирами 29 и 30, среднее звено - шарниром 31. Звенья с рамой и соединительными элементами образуют шарнирный параллелограмм.Манипулятор работает следующим образом. Привод 25 тянет гибкий орган 26, которыйй тянет допол...
Манипулятор

Номер патента: 1569221
Опубликовано: 07.06.1990
Авторы: Агаджанова, Краснов, Малов, Мартьянов, Хакимджанов
МПК: B25J 9/00
Метки: манипулятор
...и 13 выполнены с криволинейными пазами 17. взаимодействую нимис роликами 15. На плите 13 закрепленоконическое зубчатое колесо 18, зацепляющсеся с коническими зубчать,ми колесами 19и 20. Колесо 19 связано своим валом 21через зубчато-реечную передачу 22 с исполнительным органом 1. Он представлен в видефиксатора 23 и монорельса 24 с отверстиями 25. От колеса 20 через вал 26 движение передается исполнительному органу 2,который выполнен в виде зубчатого колеса 27 и зубчатой рейки 28. Исполнитель ный орган 3 приводится в движение толкателем 29 кулачка 30. Толкатель 29 снабжен возвратной пружиной 31.Манипулятор работает следующим образом. От кулачка 6 через толкатель 7 поступательное движение сообщается плитам 10 и 11. Блок управления (не...
Манипулятор

Номер патента: 1569222
Опубликовано: 07.06.1990
Авторы: Лошкарев, Мещеряков, Постаногов, Соловьев
МПК: B25J 15/04, B25J 9/00
Метки: манипулятор
...среды (не показано) в аэрсстатицеские опоры 48 может быть любыы из известных стандартных устройств.Цепи 7 установлены на звездочках 49и 50. Звездочки 49 сыонтировань На вас 51 привода 52 перемещения цепи 7.Манипулятор работает следующим обраЗОМ.В магазин ус"ацавливается необходимый 35 комплект инструментов. Для установки необходимого инструмента подается рабочая среда, например воздух, в поршневую полость сис овсго цилиндра 38. Поршень 37, перемешаясь под действием рабочей среды, иСоком 39 сдвигает втулку 34, сжимая пружину 4 и освобождая шлицевой конец 13 вяла1. Поступающая В штоксвые по,Ости 32 рабочая среда сдвигает поршни 29 к центру силовых цилиндров 28, сжимая пружины 30 и смецая штоки 27. Последние 45 выходят из контакта со...
Манипулятор
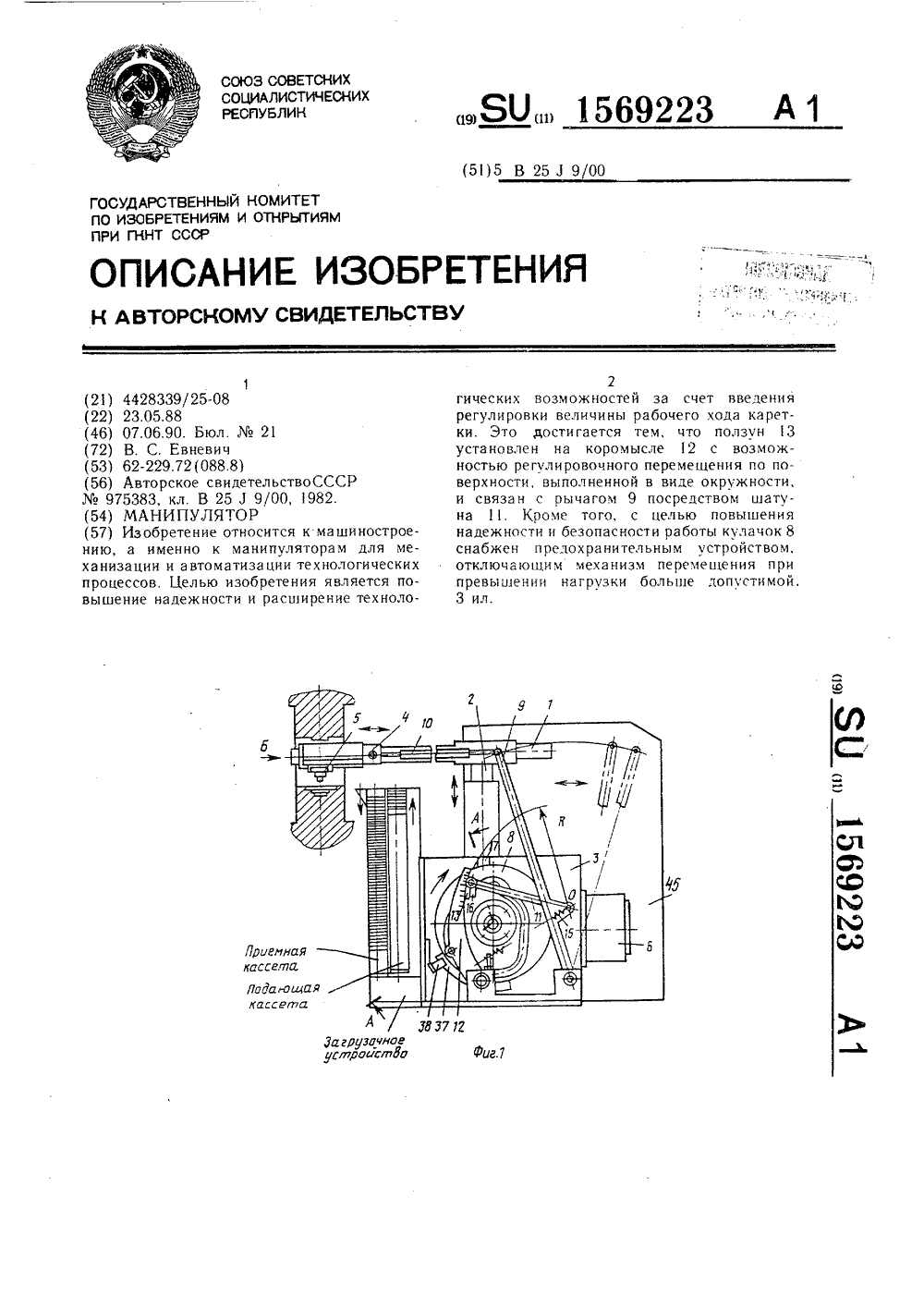
Номер патента: 1569223
Опубликовано: 07.06.1990
Автор: Евневич
МПК: B25J 9/00
Метки: манипулятор
...уорь 2,", которые установлены на втулках 26. Р осевом направлении кулачок и олумуфта 21 зафиксированы шайбой 27 с винтом 28 и стопорной шайбой 29, а также фланцем втулки 30, контактируюьсим с шайбой 31. Полумуфта 22, шайба 27 и втулка 30 зафиксировань цтиста 32 - 34,1 О 5 20 и 30 35 40 45 50 55 Редуктор 7, закрепленный в корпусе 3 и связанныч с двигателем 6, и втулка 30, установленная на выходном валу 35 редуктора 7, центрируются соосно с кулачком 8 в опоре 36. Флажок 37, взаимодействующий с датчиком 38 управления работой технологического оборудования, установлен на торце кулачка 8.Каретка 4 (фиг. 3) снабжена четырьмя верхними роликами 39 и 40, установленными попарно на осях 41, и четырьмя нижними роликами 42 и 43, установленными...
Привод захвата
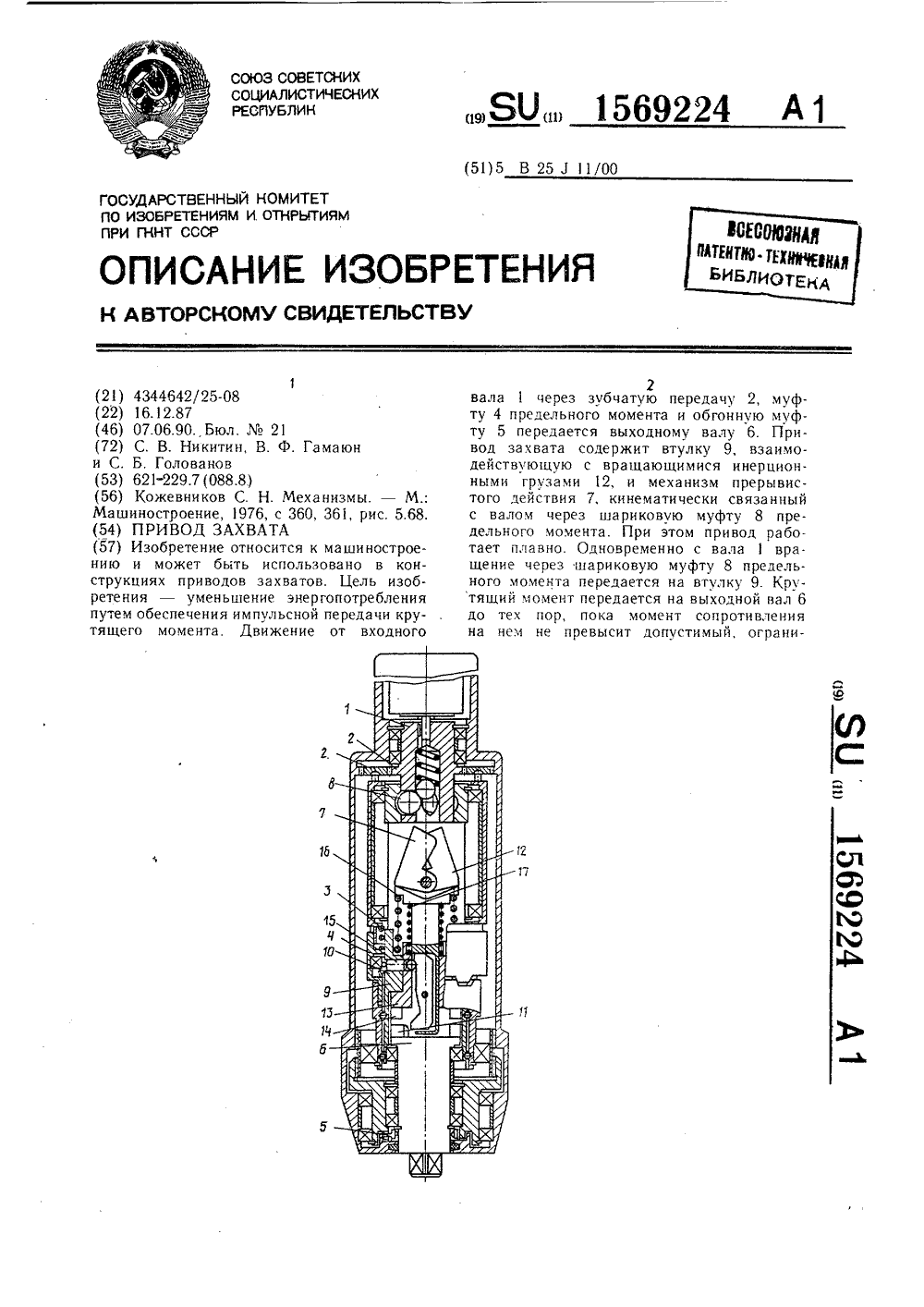
Номер патента: 1569224
Опубликовано: 07.06.1990
Авторы: Гамаюн, Голованов, Никитин
МПК: B25J 11/00
...крутящего мо- ника 14 и наковальник 11. Привод срабамента и обгонную муфту 5 с выходным тывает импульсно.валом 6. Привод снабжен механизмом 7 После этого пружина 16 возвращаетпрерывистого действия, кинематически свя- вал3 в первоначальное положение, что поззанным с входным валомчерез допол- воляет вернуться в первоначальное положенительную муфту 8 предельного крутящего 2 Б ние последовательно стопору 15 и муфте 4момента. Механизм 7 прерывистого действия предельного момента. Далее при необхопериодически взаимодействует с втулкой 9, димости цикл повторяется,установленной в корпусе 10. Механизм 7 со- Таким образом, механизм 7 прерывисдержит наковальню 11, установленную на того действия повышает эффективность равыходном валу 6. Втулка 9...
Захват манипулятора

Номер патента: 1569225
Опубликовано: 07.06.1990
Автор: Жданов
МПК: B25J 15/00
Метки: захват, манипулятора
...к мг ц ц НОТ 1 н;НИЮ, Ц и ГС 1 ЦЬ. К МСХ 1 ЦИЗ; 1. Гомым цГп О ) зычно)111 оЦель 1.1 бцетенця цпзя 1 сг;,диапазона Грк;цецця.На фцг. 1 цоказа 1.. Г .Г,тора. 1 бцц Нцд н разр 1 зе;а . Гр за 3 1 .1, а фиг 1Зцхв 1, со ц ржцт основание 1, на к Г" Ожсс:,ц Га крецлен привод двусторо,:егодейстц ц силовой цилиндр 2, штОк 3 еотоРОГО сц 1 бжгц жестко соединенной с ним трц.ВГрс" 1 Ь Основании также закреглеыН 1 а 1 ц:л:) . як им;ц 1 е ГУбки ь с осте Н 01.лоц.:.:, 1 с;", ццмц цр;жццой 6 ц с Охцатыв 1, ь, зхбкКсл 1,цс.,;-Г 1 г,1 О; (, По.-,в(ц 1 ецц). ц)Гис.1 хбк,. с; .; ей Я к тп;.ворсе 4за х ГГ р 1 б(1 ееле .у) ци, СГ 1 разс) цЯЦ 1;1 Г, 1,О , ПГЦКОН Ц И ";. ВЕ)Ссс цццц ц:1 я со 1 О: 5 Ги, ОНО"О 1Иц",Гза, Ц 1 Х. 1 "сЦ Ц,Пх Ней ГОПКО. . Х Па...
Захват манипулятора

Номер патента: 1569226
Опубликовано: 07.06.1990
Авторы: Бостан, Ботез, Бурдужа, Дулгеру, Поляруш
МПК: B25J 15/00
Метки: захват, манипулятора
...является расширение функциональных возможностей за счет установки дополнительного конического колеса, направление вращения которого противоположно направлению вращения основного зубчатого колеса. На фиг. 1 показан захват манипулятора; на фиг. 2 - вид А на фиг, 1; на фиг. 3 - вариант исполнения схватов. Захват манипулятора содержит корпус 1, в котором размещен электродвигатель 2 и прецессионный редуктор 3. Редуктор 3 включает сателлитный блок колес 4, содержащий зубчатые венцы 5 и 6, которые входят в зацепление с одной стороны с неподвижным зубчатым колесом 7, а с другой - с двумя ведомыми зубчатыми колесами 8 и 9. ь 1 исло зубьев зубчатого колеса 8 на одно меньше, чем число зубьев венца сателлитного колеса, а число зубьев зубчатого...
Схват манипулятора

Номер патента: 1569227
Опубликовано: 07.06.1990
Авторы: Алуф, Кассир, Моложавцев, Павловский, Юшков
МПК: B25J 15/00
Метки: манипулятора, схват
...устройство выполнено в виде трубы 21, закрепленной не. стенках, корпуса, прн этом и в трубе н на боковых стенках корпуса выполнены продольные щели 22, сообщающиеся между собой и равные длине зажимаемого пакета деталей. Внутри трубы размещен эластичный резиновый) рукав 23, к которому подводится сжатый воздух, или он соединяется с атмосферой обычным пневмораспределителем.Схват работает следующим образом.Лента 20 конвейера, перемещаясь слева направо, перемещает ориентированные пластины 8, уложенные на шнурах 19 с перекрытием 14 - 30 мм. При движении первая пластина надвигается на клиновидный 5 10 15 20 30 упор 14 и занимает положение, параллельное его поверхности, заходя в соответствующую ячейку крышки 3. При этом так же...
Захват манипулятора

Номер патента: 1569228
Опубликовано: 07.06.1990
Авторы: Бройт, Выборнов, Гаврилов, Пятков
МПК: B25J 15/00
Метки: захват, манипулятора
...выполненные в виде бесконечных замкнутых лент. Один из роликов на каждой захватной губке имеет автономный привод. Кроме того захватные губки снабжены индивидуально управляемыми механизмами натяжения лент, При включении приводных роликов в нужном направлении и с нужной скоростью можно осуществлять вращение детали, зажатой между лентами, ее перемещение вдоль губок или совместное вращение и перемещение. Кроме того, наличие и иди видуально управляемых меха н измов натяжения лент позволяет осуществлять все указанные операции с деталями, отличными от цилиндрических в поперечном сечении.2 ил,ними. Под действием привода 4 губки перемещаются до соприкосновения с изделием. За счет работы индивидуальных приводов 1 О натяжения бесконечные ленты...
Захват манипулятора

Номер патента: 1569229
Опубликовано: 07.06.1990
Автор: Яснов
МПК: B25J 15/00
Метки: захват, манипулятора
...пеоемещеции захвата рукой 20 вертикально Вниз выступ 16 рычага 15 прижимает заготовку 21 к плоскости 22, Гяст, гивяя пружину 8, а острие клина 7 перс МРЦЯРТС 5 ИЗ ТОЧКИ В ТОЧКУ В И, СО.поикоснувшись с плоскостью 22,;)еремещается в точку С, прц этом рычаг 5 поворацивается против часовой стрелки, растягивая пр.жину 13. тоцкя С траектории острия слиня 7 соответствует остановке руки 20. После этого В пор)цневую по Фор)ула изобргтеии 45 50 55 5 э; :)Ц 30 35 4 О,)с)сть цилиндра 3 подается давление, при этом иток 4 выдвигается в сторону заготовки 21, перемещая осью 6 рычаг 5, который совершает сложное движение, состояГцее из вращения его по часовой стрелке Вокруг оси 9 под действием пружи)Гь 3 и вра.цения самой оси 9 совмест- нО с тягой 10...
Захватное устройство

Номер патента: 1569230
Опубликовано: 07.06.1990
Авторы: Гаврилов, Куделя, Мелешко, Нейбергер, Смаженко, Юшко
МПК: B25J 15/00
Метки: захватное
...вид; на фиг, 2 - разрез А - А на фиг. 1; на фиг, 3 - разрез Б - Б на фиг. 2.Захватное устройство включает корпус 1, в котором размещен силовой цилиндр 2, шарнирно соединенный двуплечими рычагами 3 и 4 (первая г 1 ара рычагов) с подвижными элементами и головками 5 и 6. В корпусе 1 шарнирно закреплены рычаги 7 и 8 1 вторая пара рычагов), на концах которых с одной стороны расположены зубчатые секторы 9 и 10 для синхронизации перемещения головок, а с другой стороны - головки 5 и 6, на которых закреплены подвижные и съемные зажимные губки 1 и 12, Последние выполнены съемными для захвата как круглых, так и плоских предметов (деталей.).Головки 5 и 6 снабжены размещенным В ПаэаХ 13 НабОрОМ СЪЕМНо 1 Х ВКЛадЫШЕй 14, служащих для увеличения...
Захватное устройство

Номер патента: 1569231
Опубликовано: 07.06.1990
Автор: Дмитриев
МПК: B25J 15/06
Метки: захватное
...возможностей.На чертеже показано захватное устройство.Захватное устройство содержит катушкуэлектромагнита, установленную внутри "и;товой пружины 2 сжатия. Катушка 1 закреплена на корпусе 3. Опорное кольцо 10 1 связано с подвижным сердечником 5 посредством шаровой опоры б,Устройство работает следующим образом. Формула изобретения Захватное устройство, содержащее корпус, на котором установлен зажимной элемент, выполненный в виде винтовой пружины сжатия, связанной с приводом лынейного перемещения посредством опорного кольца, отличающееся тем, что, с целью расширения технологических возможностей, кривод линейного перемещения выполнен в виде электромагнита с подвижным сердечником, при этом катушка электромагнита установ лена соосно с...