Голявин
Роторный гвоздильный автомат

Номер патента: 1423237
Опубликовано: 15.09.1988
Авторы: Арсеньев, Беляев, Головня, Голявин, Гусинский, Евтеев, Калениченко, Лейдерман, Махтюк, Рабинович
МПК: B21G 3/12
Метки: автомат, гвоздильный, роторный
...вал 5 и деформирующий ролик 4; третье - через шестерни гитары 38 и звездочки 66, 67 на приводные валы 15 и 16. От приводных валов 15 и 16 через шестерни 17, шестерню-звездочку 19, звездочку 18 и на валы 13 и 14 с закрепленными на них приводными роликами 11 и 12. От шестерни 44 вращение передается с помощью системы шестерен 43 транспортирующим роликам 29, у которых каждая последующая пара благодаря тому, что связана с предыдущей повышающей передачей, вращается с большей скоростью, чем предыдущая.Проволока подающей роликовой парой 12 протягивается через правильный механизм 42 и подается под роликовую режущую пару 11, где разрезается на равномерные заготовки, длина которых равна шагу расположения ножей на периферии режущих роликов, Длина...
Робот к штамповочному прессу

Номер патента: 1340868
Опубликовано: 30.09.1987
Авторы: Голявин, Дежуров, Кузьмичев, Фадеев, Шаблинский
МПК: B21D 43/00, B25J 13/00
Метки: прессу, робот, штамповочному
...при этом захватный орган 68 25 находится в магазинном устройстве 12, а захватный орган 6 - в штампе 13. Для включения робота необходимо нажать кнопку пневмораспределителя 26, В связи с тем, что толкатель пневмораспределителя 17 утопленупором 16, та сжатый воздух по трубопроводам попадает в пневмораспределители 18 и 19, причем в пневмораспределитель 19 ,он поступает раньше,нежели в пневмораспределитель 18,в результате захватные органы 5 и 6захватывают заготовку соответственноиэ магазинного устройства и из штампа пресса 13, а затем осуществляетсяперемещение каретки в крайнее правое положение, При эгам штанга 4 сзахватными органами 5 и 6 поднимается вверх в соответствии с профилемкопирного паза. Выдвижению плунжеравсилового цилиндра 8...
Автоматизированный комплекс для штамповки

Номер патента: 1328036
Опубликовано: 07.08.1987
Авторы: Голявин, Дежуров, Ростиславина, Фадеев, Шаблинский
МПК: B21D 43/00, B30B 15/30
Метки: автоматизированный, комплекс, штамповки
...24, рабочая жидкость в которой посредством дополнительных отверстий Г и пазов Д (фиг, 6) сообщена с силовым цилиндром 25 подпитки (фиг, 4). Плунжер 22 снабжен уплотнениями 26, и силовой цилиндр 25 подпитки соединен с пневмоблоком 27.Автоматизированный комплекс работает следующим образом.В начале цикла руки 11 манипуляторов 2 втянуты и находятся в верхнем положении, поворотный магазин 3 поддерживает стопу заготовки на уровне захвата их манипулятором,Правая рука выдвигается вперед. Совместно обе руки опускаются вниз с включением захватов. Происходит захват заготовок левой рукой в поворотном магазине 3 и на промежуточной позиции 4, правой рукой - в штампе пресса 1, затем осуществляется подъем обеих рук и синхронное передвижение рук...
Установка для отделения листовых заготовок от стопы, подачи в пресс и удаления обработанного материала

Номер патента: 1321505
Опубликовано: 07.07.1987
Авторы: Голявин, Дежуров, Шаблинский
МПК: B21D 43/00
Метки: заготовок, листовых, обработанного, отделения, подачи, пресс, стопы, удаления
...два автономных схвата 6, 16,Каждый из магазинов 8, 9 установлен содной иэ сторон каждого пресса 1, 2.а центры их рабочих ячеек расположены на одном радиусе, проходящем через центр давления прессов 1,2.3 ил. В начале цикла руки робота 3 втянуты и повернуты влево, в штампе; пресса 1 находится отштампованная на нем заготовка, а в схвате 7 правой руки робота 3 установлена заготовка из магазинного устройства 9, механизм сдвига средней руки находится в пра 1321505 4вом положении, а его схват 6 настроен на захват отштампованной заготовки на прессе 1.Набирается соответствующая програм ма на пульте системы 4 программногоуправления и после включения ее в режим "Работа" руки робота 3 выдвигаются вперед, опускаются вниз, левая рука...
Гидравлический пресс для прессования в кипы волокнистого материала
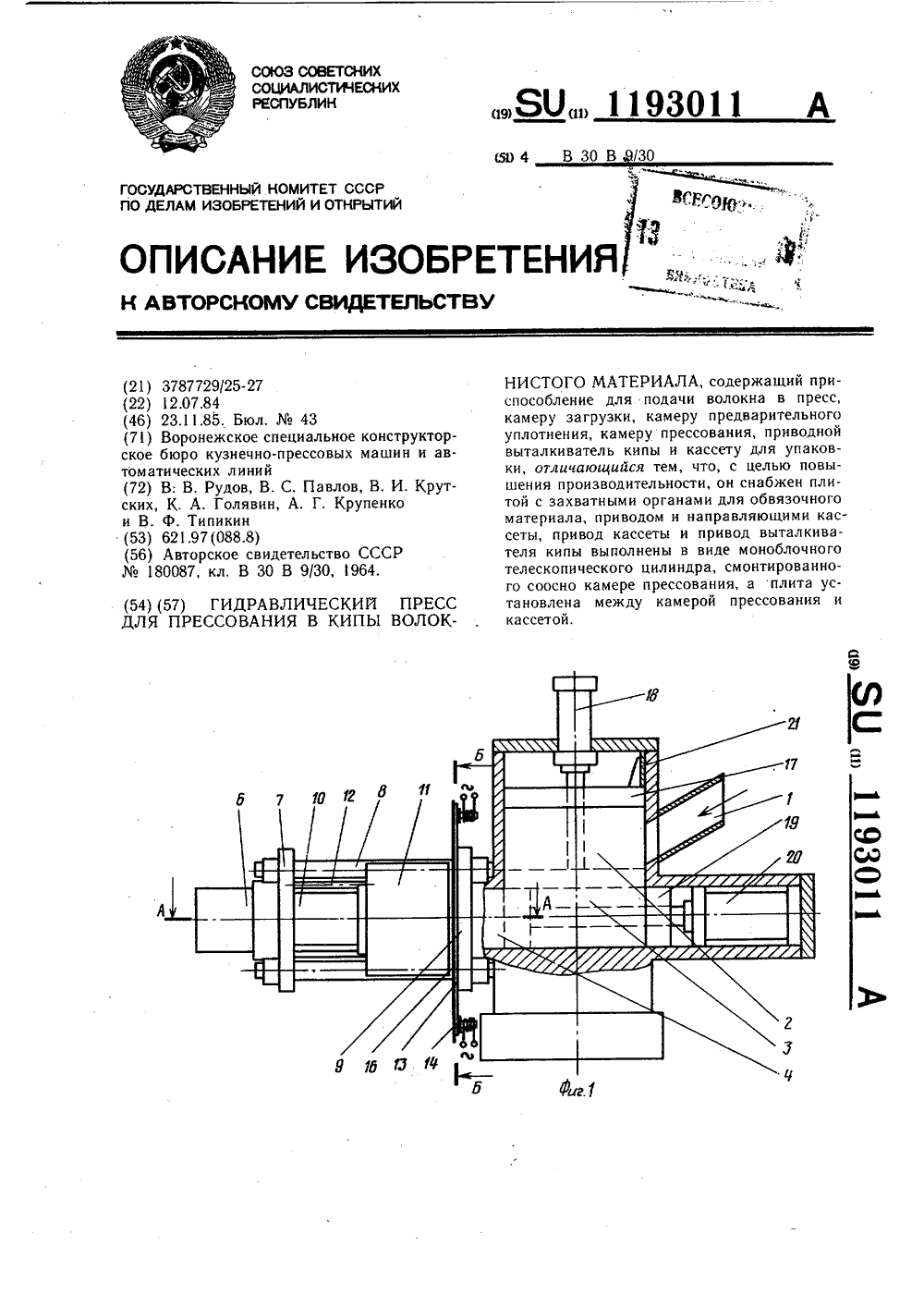
Номер патента: 1193011
Опубликовано: 23.11.1985
Авторы: Голявин, Крупенко, Крутских, Павлов, Рудов, Типикин
МПК: B30B 9/30
Метки: волокнистого, гидравлический, кипы, пресс, прессования
...уплотненияимеет плиту 19, установленную на штоке гидравлического цилиндра 20. 40Камера 2 загрузки снабжена укрепленной на плите 17 заслонкой 21, приостанавливающей подачу волокна в период перемещения плиты 17 вниз.Устройство работает следующим образом.Волокнистый материал поступает по наклонному лотку 1 в камеру 2 загрузки подплиту 17. Цилиндр 18 период,ически включается в работу и перемещает вниз плиту 17,которая проталкивает волокно в камеру 3 БОпредварительного уплотнения и возвращается в исходное положение. В период перемещения плиты 17 вниз заслонка 21 перемещает.ся вместе с ней и перекрывает доступ волок.на в камеру 2 загрузки. После накопления волокна в камере 3 предварительного прессования включается цилиндр 20,...
Устройство для управления механизмом подпора матрицы пресса для прессования изделий из металлических порошков

Номер патента: 1031759
Опубликовано: 30.07.1983
Авторы: Голявин, Минаков, Сомов, Татаринов
МПК: B30B 11/00
Метки: матрицы, металлических, механизмом, подпора, порошков, пресса, прессования
...полостями и четвертый обратный клапан с гидропневмоаккумулятором, вход третьего двухпозиционного клапанного распределителя соединен с поршневыми полостями гидравлических цилиндров, а его выход подключен между двумя последовательно установленными обратными клапанами.На чертеже показана принципиальная схема предлагаемого устройства.Устройство содержит гидравлические цилиНдры 1 и 2 с поршнями 3 и 4, в которых образованы поршневые 5 и 6 и штоковые 7 и 8 полости. Для управления движением цилиндров 1 и 2 предусмотрен распределительный блок, включающий двухпозиционные клапанные распределители 9 - 11 с электромагнитными золотниками 12 - 14 для их5101520 25 Зо3545 50 55 При подпоре вытесняемая рабочая жидкость из полостей 5 и б перепускается...
Промышленный робот

Номер патента: 965761
Опубликовано: 15.10.1982
Авторы: Боровитченко, Голявин, Дежуров, Зинченко, Каверин, Шаблинский, Шаршов
МПК: B25J 9/00
Метки: промышленный, робот
...зубчатой рейки 8, а величина вертикаль.гйого перемещения колонны 2 положением упоров 25 и 26 на штанге 24. При изме Е нении угла поворота или величины вертикального перемещения положение датчиков положения 14 и 29 не изменяется,Предлагаемый промышленный робот позволяет уменьшить инерционные массы ме- И ханизма поворота, так как в повороте кроме рук и шестерни участвует только одна колонна, что позволяет повысить точность позиционирования, повысить жесткость конструкции за счет уменьшения количеств ва элементов до двух (шестерня и колонна), передающих крутящий момент и их длину улучшить условия обслуживания и регулировки, так как свободен доступ к приводам подъема и поворота и осуществляются регулировки всех положений колонны;...
Привод модуля промышленного робота

Номер патента: 960005
Опубликовано: 23.09.1982
Авторы: Голявин, Дежуров, Шаршов
МПК: B25J 9/00
Метки: модуля, привод, промышленного, робота
...полностьюоткрыты. При подаче сигнала от системы960005 формула изобретения СоставиТехред А.Тираж 10Государственелам изобретесква, Ж - 35,Патент, г. У ель И. ПащенкБойкас Редактор Н. БобковаЗаказ 6840/19 Коррек7 Подписноеого комитета СССРий и открытийРаушская наб., д. 4/5жгород, ул. Проектная,тор Г. Огар ВНИИПИпо113035, Милиал ППП ленного робота на воздухораспределитель 2, сжатый воздух поступает в поршневую полость пневмоцилиндра и сбрасывается из штоковой полости. Поршень пневмоцилиндра начинает движение (на чертеже влево), При подаче сжатого воздуха (по команде5 от СПУ) в управляющую полость Б плунжер 4 перекрывает магистраль выхлопа и сжатый воздух через отверстие 8 поступает в штоковую полость пневмоцилиндра 1, образуя воздушную...
Промышленный робот

Номер патента: 931462
Опубликовано: 30.05.1982
Авторы: Батуркин, Боровитченко, Голявин, Дежуров, Каверин, Каширин, Лебедева, Хаймов, Шаблинский, Шаршов
МПК: B25J 9/00
Метки: промышленный, робот
...включении робота на заданныйрежим работы сжатый воздух поступаетот цеховой сети в узел 8 подготовки сжатого воздуха. 8 узле 8 автоматически обеспечивается контрольдавления воздуха в цеховой сети, всистеме робота, в системе датчиковвнешней и внутренней информации,очистка воздуха от частиц воды, компрессорного масла и твердых частиц,сброс из пневмосистемы избыточногодавления, контроль минимального дааления в пневмосистеме, питание че 5 19 15 20 25 ЗО 35 4 О 45 50 55 рез пневмораспределители блоков12 и 13 нулевой и общей защиты,блока 11 усилителей дискретных сигналов, датчиков 7 внешней информации, цилиндра 15 подпитки, гидротормозов 14,От пневмораспределителей блока 12нулевой защиты питание подается кпневмораспределителям 9,...
Пресс для прессования изделий из металлических порошков

Номер патента: 927557
Опубликовано: 15.05.1982
Авторы: Голявин, Сомов
МПК: B30B 11/00
Метки: металлических, порошков, пресс, прессования
...штоковых полостей гидро- цилиндров 22 и подпора матрицы.В этот момент нижний упор 15 разворачивается таким образом, что его впадины совпадают с выступами упора 27, к результате чего матрица начинает перемвщатвся вниз относительно нижних неподвижных пуансонов при помощи механизма стягивания не показано), посредством двух штанг 32 и траверсы 20 происходит извлечение отпрессованного иэделия, которое затем удаляет-. ся из зоны матрицы. После удаления изделия матрица под действием гидро 3 92755 жен корпусом иступенчатой цилиндри ческой штангой с глухим центральным отверстием в ее утолщенной части и нарезкой на конце, сочлененной с нарезкой дополнительной гайки, а в упомянутых установочных гайках выполнены отверстия, при этом корпус закреплен...
Предохранительное устройство пресса

Номер патента: 903214
Опубликовано: 07.02.1982
Авторы: Белашков, Голявин, Крылов
МПК: B30B 15/28
Метки: предохранительное, пресса
...15 и 16 взаимодействует с датчиком 17. На ползуне 2 установлен регулируемый упор 18, взаимодействующий с датчиком 19. На подвижном столе установлена нижняя половина штампа с элементами 20, 22 и 21. Между фланцем 4 и ползуном 2 размещены прокладки 23Неподвижный стол 24 с элементами 25-30 верхней половины штампа жестко прикреплен к стакану 31, смонтированному в станине и образующему с25 поршнем 32 и штоком 33 камеру 34 противоприжима, заполненную жидкостью под давлением.Предохранительное устройство работает следующим образом.При работе с крупными штампами удаляют прокладки 23, и в этом случае кольцо 3 и фланец 4 перемещаются синхронно.При работе малогабаритными штампами фланец 4 через прокладки 23 жестко крепится к ползуну 2, и в...
Механогидравлический пресс

Номер патента: 846310
Опубликовано: 15.07.1981
Авторы: Белашков, Голявин, Крылов
МПК: B30B 15/00
Метки: механогидравлический, пресс
...половины штампа 15 с полосой 16 становится в определенное полностью не выпрямленное положение. Дальнейшее выпрямление рычагов 9 и 13 через верхнюю половину штампа 17 вызывает подъем прижима 4, а через столб жидкости в камере б поршня 2 со штоком 1 и инструментом 3 на величину несколько большую толшины вырубаемого материала (5), т.е. рабочий цилиндр вместе с прижимом вводятся в рабочее положение. Когда рычаги 9 и 13 станут в вертикальное положение, жидкость под давлением от насоса 18 по трубопроводу 19 подается в полость 20 рабочего цилиндра 7. Поршень 2 вместе со штоком 1, инструментом 3 и прижим 4 через столб жидкости камеры 6 начинают опускаться вниз. Поскольку инструмент 3 от нижнего уровня нижней половины штампа 15 установлен с...
Муфта-тормоз

Номер патента: 819441
Опубликовано: 07.04.1981
Авторы: Ванин, Голявин, Демиденков, Строгонов, Томашевский
МПК: F16D 67/04
Метки: муфта-тормоз
...на шлицах втулки 29,Втулки 29 и 10 насажены на шпонках или шлицах на ведомом валу 4 и удерживаются от осевого смещения шайбой 30 с помощью болтов. Поршень 25 пневмоцилиндра посредством болтов 31 через проставки 32 жестко скреплен с корпусом 18. Для обеспечения регулировки усилия нажатия пружина муфта-тормоз снабжена регулировочными винтами 33 с конт- гайками см. Фиг. 2 и 3) , расположенными на периферии фланца цилиндра и упирающимися в кольцо 24. На цилиндре 26 размещены пальцы 34,которые обеспечивают направление при перемещении цилиндра относительно поршня и его центрирование.В торце цилиндра смонтирована воэдухопроводящая головка 35, Для обеспечения охлаждения муфты-тормоза для циркуляции воздуха корпус 5 тормоза и корпус 18...
Муфта-тормоз

Номер патента: 720236
Опубликовано: 05.03.1980
Авторы: Балаганский, Голявин, Крутских, Шеленков
МПК: F16D 67/00
Метки: муфта-тормоз
...закреплен наступице 5, в которой выполнены каналы 12 для подвода сжатого воздуха.Ступица 5 сопряжена с валом 13 и воз -духоподводящей головкой 14, имеющейканалы 15 для подвода сжатого воздуха.Фрикционный тормоз состоит изопорного диска 16 с фрикционными элементами, соединенного подвижно черезпромежуточную ступицу 17 с поршнем 4( с целью исключения проворота при.гЦНЕИП1.ИР аэ 305/1писноепередаче тормозного момента диск эаксирован шпонкой 18, эакрепленнонпа ступице 17), опорного тормозногоДиска 19, закрепленного на раз 1 рузоч -ной Втулке 2, соединенной со станинойнеподвижных тормОзных,циск ов20 т втулок 21, соединенных с пальца м:.; 22, установленными в Опорном тике 19, промежуточного диска 23 сФРИКЦИОННЫМИ ЭЛЕМЕНтаМИ, Эажи 11.т 1...
Гидравлический пресс для прессования изделий из порошковых материалов

Номер патента: 593932
Опубликовано: 25.02.1978
Авторы: Балаганский, Голявин, Гончаров, Плахотнюк
МПК: B30B 11/06
Метки: гидравлический, порошковых, пресс, прессования
...неподвижного стола 20, на котором расположеннеподвижный нижний пуансон 21. Ограничители 22 жестко укреплены на плите 18 и определяют глубину внедрения верхнего пуансона5 в матрицу 19.5При изготовлении изделий с переходами сцилиндрической на коническую или криволинейную форму (фиг, 2; участок бв изделияможет быть н криволинейным) пресс работает следующим образом.Полость 23, образованная матрицей 19,нижним неподвижным пуансоном 21 и центральным стержнем 14, заполняют порошком.Верхний пуансон 5 движется вниз. Размерверхнего цилиндрического участка аб на изделии устанавливают регулировкой положениякольца 6 относительно торцов ограничителей 22Высоту верхнего цилиндрического участкаопределяют из соотношенияН = Н, - Нгде Н, - размер от...