Устройство для коррекции эквидистанты в фазовых системах числового программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 482725
Автор: Соколов
Текст
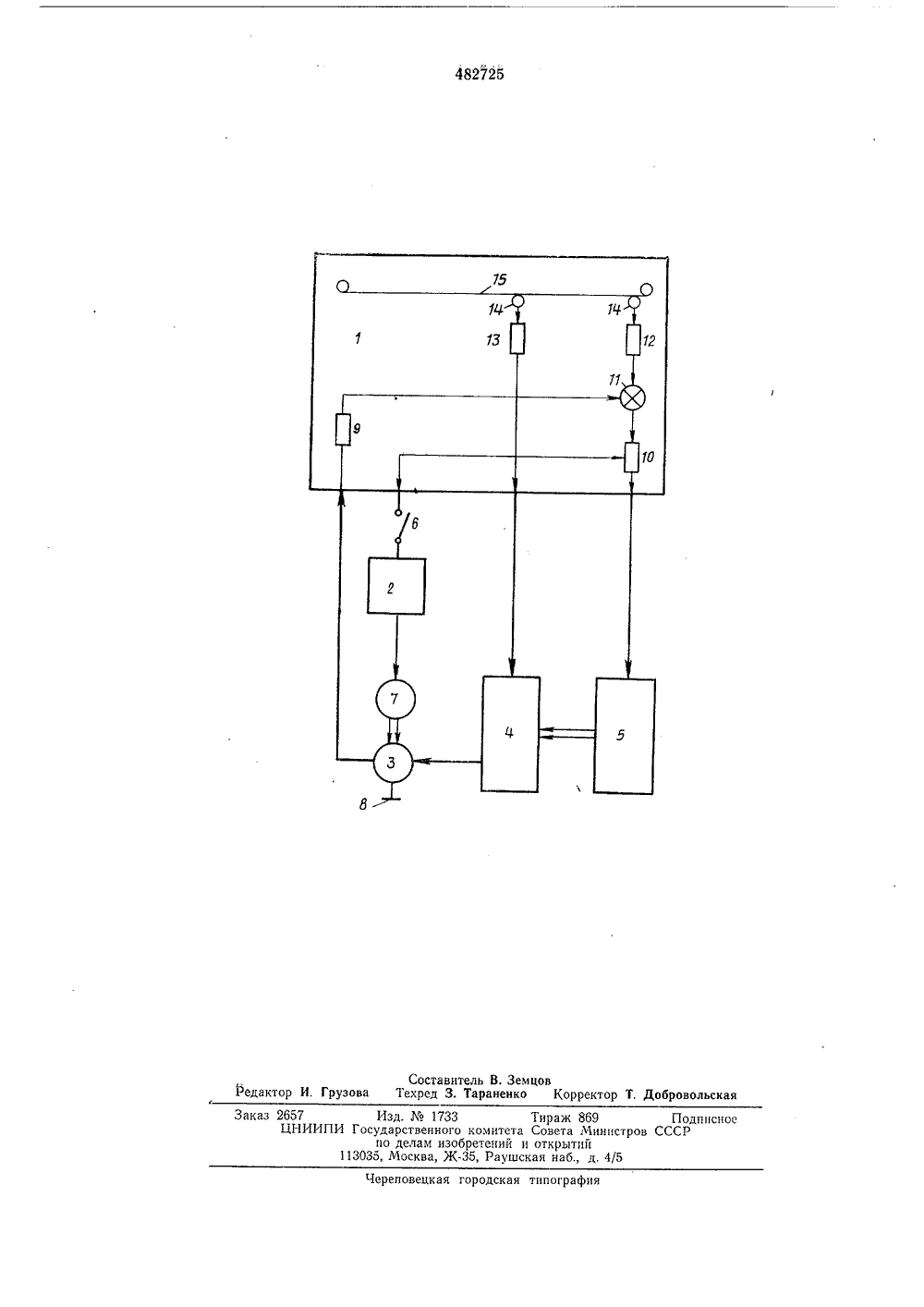
482725 Союз СоветскихСоциалистических Республик ИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(51) М. Кл. 6 05 Ъ 19/16 исоединепием заявкиГосударственный комитет Совета Министров СССР ло делам изобретений и аааытий(54) УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ЭКВИДИСТАНТЬ В ФАЗОВЫХ СИСТЕМАХ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯИзобретение относится к области станкостроения и может быть использовано в станках с программным управлением.Известно устройство для коррекции эквидистапты в фазовых системах числового про граммного управления, содержащее блок управления, первый выход которого подключен к исполнительному двигателю, механически соединенному с датчиком обратной связи, а второй выход - к входу датчика обратной 1 О связи. Выход датчика обратной связи соединен с входом вращающегося трансформатора, выход которого подк.почсн к входу блока управления.Цель изобретения -- повышение точности 15 работы устройства.Это достигается тем, что в устройство введены дополнительный электродвигатель и блок задания размера инструмента, вход которого подключен к третьему выходу блока управле пия, а выход - к дополнительному электродвигателю, механически связанному с вращающимся трансформатором.На чертеже показана схема предлагаемого устройства для корррекции эквидистанты в 25 фазовых системах программного управления.Оно состоит из блока 1 управления, блока 2 задания размера инструмента, вращающегося трансформатора 3, датчика 4 обратной связи, исполнительного двигателя 5, выключателя 6, зо дополнительного электродвигателя 7, рукоят.ки 8 ручного управления.Блок 1 выполнен из усилителя 9 вращающегося трансформатора, усилителя 10 мощности,фазового дискриминатора 11, усилителя 12 рабочего сигнала, усилителя 13 сигнала обратной связи, магнитных головок 14 и магнитнойленты 15.Блок 2 задания размера инструмента содержит усилитель мощности, усиливающий рабочий сигнал управления, и магнитный усилитель, управляющий оборотами дополнительного электродвигателя 7.Вращающийся трансформатор 3 предназначен для ввода коррекции на заданное изменение эквидистанты, это изменение эквидистапты может происходить вручную, через рукоятку 8 или автоматически через блок 2 задания размера инструмента и дополнительныйэлектродвигатель 7.Устройство для коррекции эквидистанты вфазовых системах числового программногоуправления работает следующим образом.Если обработка детали ведется инструментом заданного по эквидистанте размера, товыключателем 6 отключают блок 2 и электродвигатель 7,Из блока 1 управления одновременно поступают от двух дорожек магнитной ленты синусоидальцые сигналы - усиленный рабочий сигнал и усиленный опорный сигнал,Усилитель 13 сигнала обратной связи питает датчик 4 обратной связи, ротор которого кццематически связан с управляемой коордицатой рабочего органа станка через испо;1 пительный двигатель 5, Опорный сигнал из датчика обратной связи проходит через вращающийся трансформатор 3 без изменения, так как он не вращается, поступает в блок 1 управления и, пройдя усилитель 9 вращающегося трансформатора, подается па один из входов фазового дискриминатора 11, являющийся в первом приближении мцожительпым устройством. На другой вход фазового дискримипятора подаетсяси;1 епп.1 Й р 1 бочи 1 спгпял.В результате суммирования этих сигналов ца выходе фазового дискриминатора получается сигнал ошибки следящего привода. Далее этот сигнал усиливается усилителем 10 мощности и поступает па исполнительный двигатель 5. рабочего органа станка, который стремится установить управляему 1 о координату в такое положение, когда сигнал ошибки равец или близок к цу,1 о. По окоцчяпии обработки инструмент отходит в исходное положение и станок выключается,Для коррекции эквидистапты, цри техцологической цеобходимости большего цли мецьшего размера режущего инструмента, до начала обработки выключателем 6 подключают блок 2 и электродвигатель 7. При помощи органа управления магнитным усилителем устанавливают необходимую коррекцию эквидистанты, Корректируют исходное положение инструмента, после чего станок включают и начинают обработку детали.Из блока 1 управления одновременно поступают от двух дорожек мап 1 итпой ленты те же синусоидальцые сигналы - рабочий усиленный сигнал и опорный усиленный сигнал,Усилитель опорного сигнала (усилитель обратной связи) питает датчик обратной связи, ротор которого кинематически связан с управляемой координатой рабочего органа станка через исполнительный электродвигатель 5. Его вход и выход через вращающийся трансформатор 3 изменяются ввиду ввода коррекции на изменение размера эквидцстапты.Без коррекции эквидистапты усилепный сигнал ошибки следящего привода из усилителя 10 мощности подается па исполпительпый двигатель 5 рабочего оргяця ставка, который стремится установить управляемую коордипату в такое положение, когда сигнал ошибки равец или стремиться к нулю.В то же время тот же усиленный сигналошибки следящего привода из усилителя мош пости подается в блок задания размера инструмента. Сигнал управления при помощи оргапов управления магнитным усилителем вращает дополнительный электродвигатель, который поворачивает вращающийся трацсформа О тор и корректирует сигнал ошибки следящего привода в плюс или минус в зависимости от заданного направления вращения электро- привода. Процент коррекции эквидистацты устанавливают такой, чтобы суммарное рас согласование вращающегося трансформатораи датчика обратной связи были в пределах возможностей фазового дискриминатора.Скорректированный сигнал ошибки из врац,ающегося трансформатора входит в блок 1 20 и через усилитель вращающегося трансформатора подается ца один из входов фазового дискрим 1 шаторя, являющегося по существу множительным устройством. На другой вход фазового дискриминатора подается рабочий 25 усиленный сигнал с магнитной ленты, В ре.зультате суммирования этих сигналов на выходе фазового дискриминатора получают сигнал скорректированной ошибки следящего привода, Далее этот сигнал усиливается уси.30 лителем мощности и поступает ца исполнительный двигатель рабочего органа станка, который стремится установить управляемую координату в такое положение, когда сигнал ошибки равен или стремится к пулю.35Предмет изобретения Устройство для коррекции эквидистацты вфазовых системах числового программного уп.40 равлеция, содержащее блок управления, пер.вый выход которого подключен к исполни.тельному двигателю, механически соединенному с датчиком обратной связи, второй выход подключен к входу датчика обратной связи, 45 выход которого соединен с входом вращающе.гося трансформатора, выход которого подключен к входу блока управления, отличающееся тем, что, с цельо повышения точности работы устройства, оно содержит дополнительный 50 электродвигатель и блок задания размера инструмента, вход которого подключен к третьему выходу блока управления, а выход - к дополнительному электродвигателю, мехаци- сски связво 1 с врагцяощимся трацсфор матором.Череповецкая городская тнпографи аказ 2657 Изд.1733 Тираж 869 ЦНИИПИ Государственного комитета Совета Министров по делам изобретений и открытий 13035, Москва, Ж, Раушская наб., д. 4/
СмотретьЗаявка
1915727, 24.04.1973
СОКОЛОВ ВИКТОР НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/16
Метки: коррекции, программного, системах, фазовых, числового, эквидистанты
Опубликовано: 30.08.1975
Код ссылки
<a href="https://patents.su/3-482725-ustrojjstvo-dlya-korrekcii-ehkvidistanty-v-fazovykh-sistemakh-chislovogo-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для коррекции эквидистанты в фазовых системах числового программного управления</a>
Система для ввода коррекции на изменение размера инструмента

Номер патента: 311252
Опубликовано: 01.01.1971
МПК: G05B 19/18
Метки: ввода, изменение, инструмента, коррекции, размера
...поступлении сигнала программы ца вход устройства задания размера инструмента на выходе появляется сигнал, соответствующий,размеру вновь установленного нструмента, который поступает на один цз входов цтвфровой схемы 3 сравнения, а на другой вход схемы 3 сравнения подается сигнал со вспомогательного счетчика 4, в котором в этот момент содержится информация о размере предыдущего инструмента. Если число в счетчике 4 больше числа на выходе устройства, то на одном из выходов схемы 3 сравнения формируется сигнал больше, а если число в счетчике 4 меньше числа на выход успройства, то на другом выходе схемы 3 сравнения формируется сигнал меньше, Вс.- ходы схемы 3 сравнения соединены с уцраьляемым входом вентильной схемы 5. В случае появления на...
Устройство для формирования сигнала обратной связи системы управления гидроагрегатом

Номер патента: 947821
Опубликовано: 30.07.1982
Авторы: Башнин, Давидсон, Родионов, Семенов, Федоров, Щеголев
МПК: G05B 11/01
Метки: гидроагрегатом, обратной, связи, сигнала, системы, формирования
...сигнала по высокочастотному входу лежит в пре- делаМ 0,7-1, т.е. эти частоты принадлежат полосе пропускания высокочастотного входа. Этот согласованный фильтр используется для замены в области высоких частот сигнала фактической активной мощности, имеющего большие динамические погрешности, сиг налом прогнозируемой активной мощности, .Формируемьак беэынерционно в функции от открытия и напора.Блок 11 моделирования гидравлйческого удара в общем случае пред ставляет нелинейный фильтр высокой частоты, передаточная функция которого определяется из следующих соображенийПри жесткой связи генератора с 10 системой регулирования электрическая мощность, отдаваемая в сеть при перемещении регулирующего органа, совпадает численно с моментом,...
Формирователь сигнала обратной связи для устройства управления шаговым двигателем

Номер патента: 970325
Опубликовано: 30.10.1982
Авторы: Анашкин, Дрогайцев, Коц, Токарев, Чулючкин
МПК: G05B 21/02
Метки: двигателем, обратной, связи, сигнала, устройства, формирователь, шаговым
...быть сигнал логической единицы.Блок сравнения по модулю два вырабатывает сигнал логического нуля при равенстве входных сигналов и сигнал логической единицы при неравенстве входных сигналов. При отсутствии обрывав цепи одной из обмоток двигателя навходах блоков 7 присутствуют разныесигналы - сигналы. логического нуля,если соответствующая обмотка выключена, и сигналы логической единицы, если соответствующая обмотка включена.Таким образом, на выходах блоков 7находятся сигналы логического нуля,а выходные сигналы элемента ИЛИ 8 иэлемента И 9 равны логическому нулю.При этом Ю -триггер 10 находится в состоянии Я =- О, Я = 1, цто соответствует исправному состоянию схемы,При обрыве в цепи одной из обмотокдвигателя перестает протекать ток...
Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи

Номер патента: 1242913
Опубликовано: 07.07.1986
Автор: Пешков
МПК: G05B 17/00
Метки: коэффициентами, обратной, оптимальными, связи, сигнала, формирования
...т.е. чтобы312429нирующему полюсу разомкнутого объек"та из условияГлГ" лфЕсли система в момент времени С находится в состоянии х(й), то через отрезок времени Т, т.е. в момент времени й+Т, система (1) переходит в состояние, при условии ц(Т ) =сопвй,10 ЬГй,. й+Т): 13 4в котором с помощью параметра Т, а также с помощью матриц У и К, осуществляется оперативное изменение качества управления при изменении режимов работы объекта.Формирование матрицы У (й) реализуется с помощью блока интеграторов 1 и блоков 2 и 8, которые осуществляют решение матричного дифференциального уравнениях(С+Т) -с(Т) х(Е)+Н(Т) ОО,),ЮГЕ, с+Т),(4) где ф (Т)-ехр(А ), Н(Т)дехр(А)ВЙ=Г 1 ехр(АЦЙ,) В. (5) Юоо В случае, когда рассматриваемая мера отклонения Я(+Т)минимальна,...
Устройство формирования сигнала обратной связи в стабилизированных преобразователях

Номер патента: 1356140
Опубликовано: 30.11.1987
МПК: H02M 1/08
Метки: обратной, преобразователях, связи, сигнала, стабилизированных, формирования
...на выход ПП 7 "пропускается" участок синусоиды с напряжением 28 в интервале времени 1, - 1, среднее значение которого равно Б Далее напряжение .с выхода ЦАП 7 через открытый ключевой элемент 13 поступает в блок 14 хранения информации, выполненный на базе накопительного конденсатора, а затем через усилитель 15 - в блок управления стабилизированным преобразователем. В интервале временис делителя 9 частоты на входы преобразователя 11 кодов поступает второй и-разрядный двоичный код. Зная закон изменения выходного напряжения (тока во времени и величину шага между двумя точками измерения С и й, можно определить какой должна быть величина среднего значения идеального выходного напряжения 27 между. точками измерения и С с помощью формулы1...
Предыдущий патент: Устройство для программного управления процессами глубокого анодирования
Следующий патент: Устройство для монтажа жгутов
Случайный патент: 156983