Манипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1569222
Авторы: Лошкарев, Мещеряков, Постаногов, Соловьев

Текст
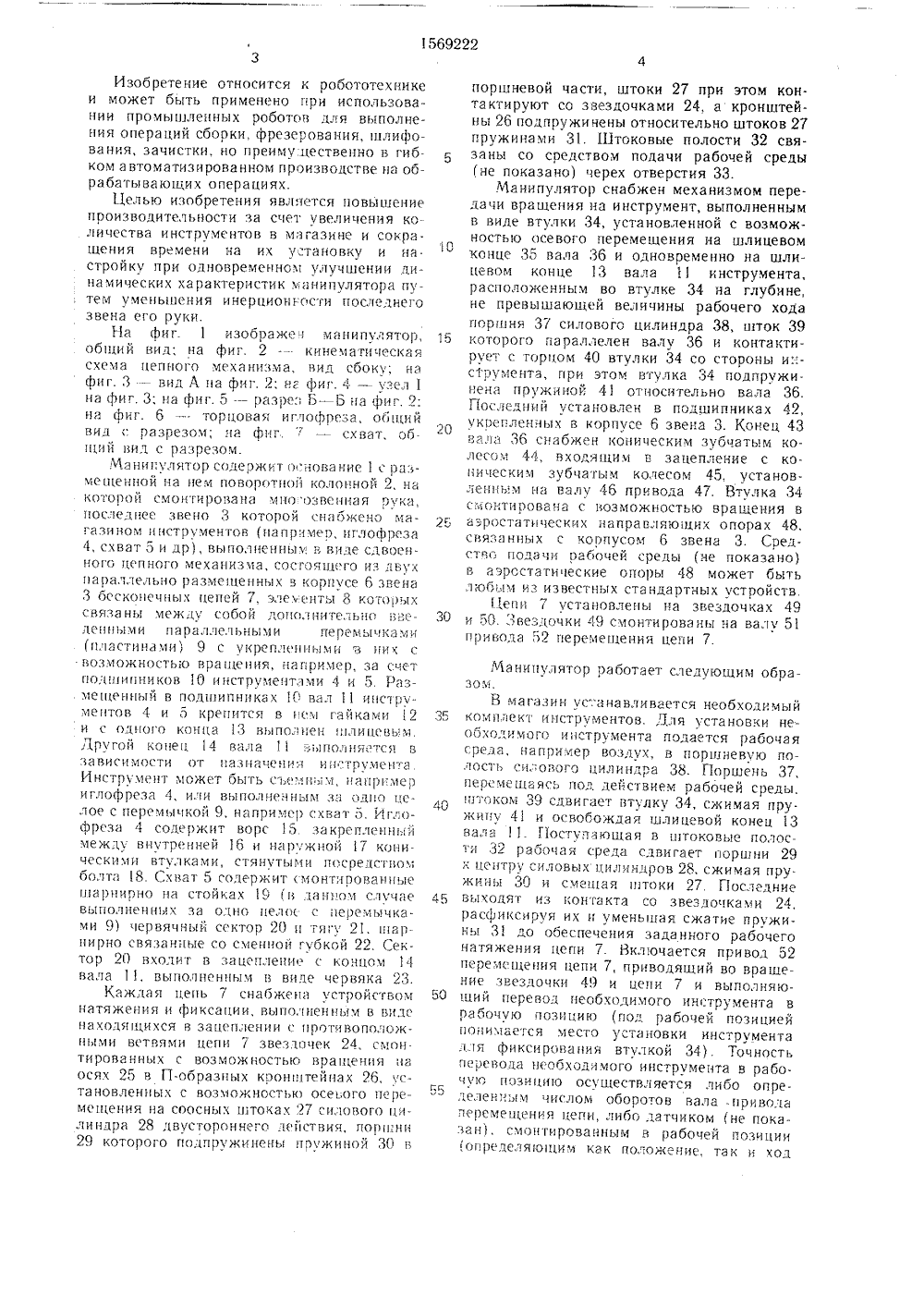
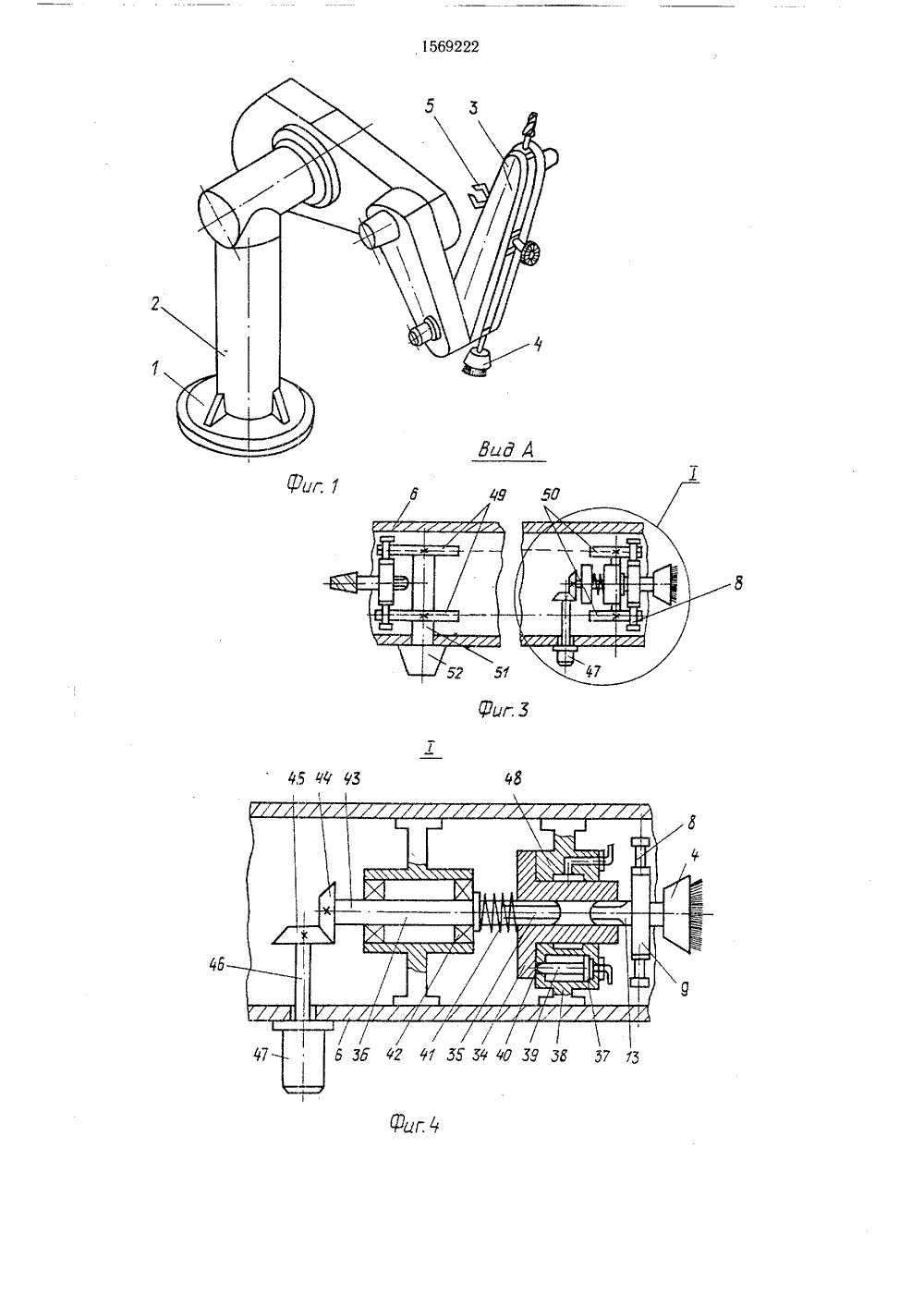
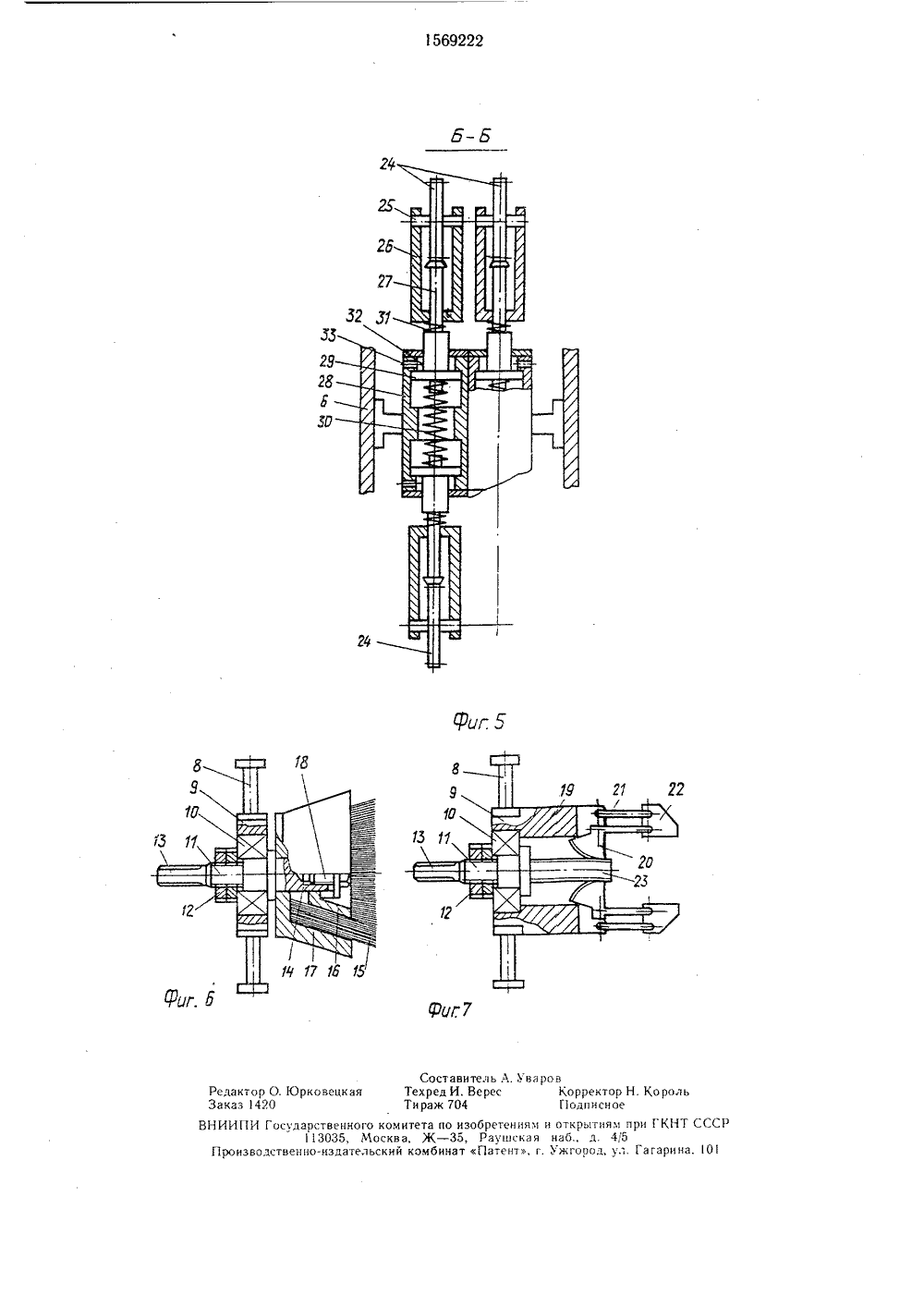
)5 В 25 1 9 00 15 04 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИК А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ 2(57) Изобретение относится к робототехнике и может быть применено при использовании промышленных роботов для выполнения операций сборки, фрезерования, шлифования, зачистки преимущественно в гибком автоматизированном производстве на обрабатывающих операциях. Цель изобретения - повышение производительности засчет увеличения количества инструментовв магазине и сокращения времени на ихустановку и настройку при одновременномулучшении динамических характеристик манипулятора путем уменьшения инерционности последнего звена его руки. Между двумя параллельными цепями 7 расположены дополнительные перемычки, в которых шарнирно размещены инструменты 4, 5. При вращении инструмента 5 в рабочей позиции от привода вращения через зубчатые колеса 45 силовые цилиндры 28 за счет внутренних упругих элементов воздействуют на кронштейны 26 со звездочками 24 и натягивают цепи 7. Штоки цилиндров 28 стопорят звездочки 24 и повышают жесткость последнего звена руки, на котором установлены эти цепи 7. При смене инструментов 4, 5 силовые цилиндры 28 через кронштейны 26 и звездочки 24 обеспечивают свободное вращение цепей 7 вместе с инструментами 4, 5. Фиксация инструмента и передача на него крутящего момента в рабочем положении обеспечивает механизм передачи вращения. 7 ил.Изобретение относится к робстотехникеи может быть применено при использовании промышленных робото для выполнения операций сборки, фрезерования, шлифования, зачистки, но преиму.цествено в гибком автоматизированном производстве на оорабатывающих операциях.Целью изобретения явлцется повышениепроизводительности за счет увеличения ко.лицества инструментов в магазине и сокращения времени на их у тановку и настройку при одновременном улучшении динамических характеристик манипулятора пу. тем уменьшения инерцио 5 госи последнегозвена его руки.На фиг. 1 изооражец манипулятор,об ци й вид; на фиг. 2 - кинем а тически я схема цепного механизма, Вид сбоку; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - узел 1 на фиг. 3; на фиг. 5 - разрез Б- - Б на фиг, 2; ца фиг. 6 - - торцовая игцофреза, оощий вид с разрезом; ца фиг. 7 - схвят, об щий цид с разрезом.Мянул 5 тор соде он(ит ОгцоВя ние 1 с ЯязмесенОЙ на ем новоОтпой кслсннси 2, на которой смонтирована мцо озвеццая рука, последнее звено 3 которой сцабкено магазиномм инструментов (5 а и р:мер, иглофр(за 4, схват 5 и др), выполенн. В виде сдвоецного еНого механизма, сосгояцего из двух параллельно разыещенных з корпусе 6 звена 3 бесконечных цепей 7, элеъенты 8 котоых связа ны между собой дополнительно вве - денными параллельными перемычками (ластицдыи) 9 с укреп:еццыми я их с возможностьо вращения, например, за сцет подшипников 10 инстрлгетами 4 и 5. Размещенный в подшипниках 10 вал 11 инструментов 4 и 5 крепится в ц(м гайками 12 и с одного конца 13 выполнен цлицевым.Другой конец 14 вала 11, - ,ыполця;-тся в зависимости от назначения ин.трумента Инструмент может быть с 5 ьеыпыы, цаприхгер иглофреза 4, или выполненным з одно целое с персг.чкой 9, ипримесхват 5. Игсофреза 4 содержит Ворс 1,э. Закрепленньй между внутренней 16 и нар,жной 17 копи.ческпми ьтулками, стянутыги посредствоы болт 18. Схват 5 содержит смонтированные шарнирно ца стойках 9 (и данном с,ъцае выполненных за одно пело( с перемычками 9) червячный сектор 20 н тягу 21. Нярнирно связанные со сменной губкой 22. Сектор 20 входит в зацеплеци( с концом 14 вала 11, выполненньм в виде червяка 23.Каждая цепь 7 снабжена устройствомнатяжения и фиксации, выполненным в виде находящихся в зацеплении с противоположными ветвями цепи 7 звездочек 24, смон.тированных с возможностью рацеця ца осях 25 в П-образных кронцтейпах 26, установленных с возможностькосеього перемецения на соосных штока.( 27 силового цилиндра 28 двустороннего:ествия, порп;ни 29 которого по пружинеы пружиной 30 в поршневой части, штоки 27 при этом контактируют со звездочками 24, а кронштейны 26 подпружинены относительно штоков 27 пружинами 31. Штоковые полости 32 связаны со средством подачи рабочей среды (не показано) церех отверстия 33.Манипулятор снабжен механизмом передачи врагцеция ня инструмент, выполненным в виде втулки 34, установленной с возможностью осевого перемещения на шлицевом конце 35 вала 36 и одновременно на шлицсвом конце 13 вала 11 инструмента, расположенным во втулке 34 на глубине, не превышающей величины рабочего хода поршня 37 силового цилиндра 38, шток 39 15 кстсрогс параллелен Валу 36 и контактирует с торцом 40 втулки 34 со стороны нцсиру.,гецта, при этом втулка 34 нодпружинеца пружинок 41 относительно вала 36, Последнии установлен в подшипниках 42, укрепленных в корпусе 6 звена 3. Конец 43 вал 36 снабжен (оцическим зубчатым колесом 44, входящим В зацепление с коническим зубцатым колесом 45, установлепь;м на валу 46 привода 47. Втулка 34 смонтирована с возможностью врадеия в 25 Яэростатицеских направляюьцих опорах 48,связанных с корпусом 6 звена 3. Средство подачи рабочей среды (не показано) в аэрсстатицеские опоры 48 может быть любыы из известных стандартных устройств.Цепи 7 установлены на звездочках 49и 50. Звездочки 49 сыонтировань На вас 51 привода 52 перемещения цепи 7.Манипулятор работает следующим обраЗОМ.В магазин ус"ацавливается необходимый 35 комплект инструментов. Для установки необходимого инструмента подается рабочая среда, например воздух, в поршневую полость сис овсго цилиндра 38. Поршень 37, перемешаясь под действием рабочей среды, иСоком 39 сдвигает втулку 34, сжимая пружину 4 и освобождая шлицевой конец 13 вяла1. Поступающая В штоксвые по,Ости 32 рабочая среда сдвигает поршни 29 к центру силовых цилиндров 28, сжимая пружины 30 и смецая штоки 27. Последние 45 выходят из контакта со звездочками 24,расфиксируя их и уменьшая сжатие пружины 31 до обеспечения заданного рабочего натяжения цепи 7. Включается привод 52 перемещения цепи 7, приводящий во вращение звездоцки 49 и цепи 7 и выполняю ций перевод цеобходимого ицсгрумента врабочую позицию (под рабочей позицией ПО 5 ИМаЕТСЯ МЕСТО УСТЯЦОВКИ ИНСтРУМЕНта ;ля фиксирования втулкой 34). Точность перевода необходимого инструмента в рабоцчую позицию осуществляется либо определениич числом оборотов вала -привода перемещения цепи, либо датчиком (не показан), смонтированным в рабочей позиции (определяоцигг как положение, так и ходФорму.а изобретеная инструмента). Отключение давления рабочей среды в поршневой полости силового цилиндра 38 приводит к сдвигу втулки 34 под действием пружины 41 и постепенному ее надеванию на шлицевой конец 13 вала 11 инструмента. Наличие шлицев в отверстии втулки 34 и на конце 13 вала 11 обеспечивает центрирование вала 11 и втулки 34 и последующую передачу крутящего момента с привода 47 вращения инструмента. Отключение давления рабочей среды в штоковых полостях 32 силового цилиндра 28 приводит к смещению поршней 29 под действием пружин 30 и сжатию пружин 31. В результате повышается натяжение цепей 7 и одновременно фиксируются звездочки 24 вступающими с ними В контакт штоками 27. Включается привод 47 вращения инструмента, передающий вращение по кинематической цепочке: вал 46 зубчатые колеса 45 и 44, вал 36, втулка 34, вал 11 инструмента, теремецая вращаюшийся инструмент по пространственной траектории посредством изменения положений, составляющих руку звеньев, манипулятор осуществляет заданную операцио. Смена инструмента после выключения привода 47 осуществляется в описанной последовательности. Все команды ня включения приводов, систем подачи рабочей среды, датчиков и логика их реализации выполняются системой управления робота, например позиционно-контурной СФЕРА.Повышение производительности достигается за счет выполнения магазина в виде вытянутого вдоль звена цепного механизма и снабжения последнего рядом устоойств, реализующих автоматическую смену, позиционирование, фиксацию и функционирование инструментов различного функционального назначения В широком диапазоне реализуемых операций, чго также гарантирует существен ное сокращение вспомогательного времени и времени технического обслуживания РТК. Повышение универсальности обеспечивается расширением технологических возможностей, автоматизацией вспомогательных операций смены, позиционирования, фиксация и др., организацией выполнения разнообразных степеней свободы инструмента и реализуемых ими функций на основе одного привода вращения при повышенной инструментальной емкости магазина, компактности и эффективности технического решения последнего, а также за счет улуч 10 15 20 25 30 35 40 45 50 щения технологичности конструкции маипллятооа. Манипулятор, содержащий осноьание и размещенную на нем поворотную колонну, на которой установлена многозвенная рука, последнее звено которой оснащено магазином инструментов и двумя механизмами передачи воацения на инстрчмент и пеоемещения магазина с инструментами, а также следящие приводы звеньев рлки и сстелл управления, отличающ,ийся тем, что, с цс. Ню повышения производительности зя счет, Вс лич:ния количества инструментов В магязп не и сокращения Вземеаи на их устаОВ- ку и настройк при одновременном ела ч- ШЕЛ 4 И ДНЯМИЧЕСКИХ ХЯ Я.(ТЕРИСТИ К Ма НИУ. лятора за счет уменьшегия инерцнокости ПОСЛЕДНЕГО ЗВЕНЯ ЕГО Р" КИ, ОН Сна ожЕ 1 ГСГ-Ойс ВО. ЯИКСЯЦИИ Ма ЯЗИ НЯ, 2 Ма ГЯЗИ: ИНСТР":ЕНТОВ ВЫПОЛНЕН В В;ДС СДВОЕННОГО цепОГО:,;еханизл 2 цепи кото;:ого оясполоЖЕНЬ чапаЛЛЕЛЪНО, ЛСТЯСВЛЕЛЬ С БОЗМОж 1 ОСТЬО ИХ ПЕЕМЕЦЕНИЯ ГдЛЬ 1 С",ЕДНЕГ звена рук, кинемат.чески связянь с мс- ХЯНИЗЛ:01 1 ЕОЕМЕЩЕЬЯ М" аЗИНЯ 1 ЖЕСТКО сьязе ны междл собой дополнительно Вве. ДЕ Н Н.=1 Иа Р 2 Л,1 Е Л Ь Н Ы М и П Л Я С Т И Н 2 "1 1, В КОТО оых . а;: оно ъстансВГг.1.сто с"еит 1.ПО; ЗО ЛСТ;.ОИСТГО ф 1;КСЯЦИЧ МЯГЯЗИНЯ ВЫ - ,;Е " О аДЕ;В . 1 Н 1 111,: НЬ; Д а. К Н Тайна ДВЕ ЗВСЗДОЦКИ, ,2 ХЗЯЯ ИЗ КО. ТО "ЫхД 1" 1 Н"О ( В "заЯ С1 С СТ и1 СЭОТ"Е 1 СТВУОЦ 1".1 КОН 11 Т" 1101, 2 С .ОГС,1 ВЕ: ВЬО 1;Е;,И СДВОЕННО 0 ПЕГ НОГО Л.ХаИзма. 2 . я кже силовой ци . и хр двухсто- РОНГЕГО ДЕЙС:ВИЯ, КЕСТКО СТЯНОВЛЕНЬЙ НЯ последнем звене рлки, цтски котооого подпр и не-ь дрО 1 О иГе ьно "ря кине- МатЧЕСКИ СЯЯЗЯНЫ С СОС ГВТСТЯл 01 ЗВЕЗДОЧКЯ М 1 И П РГО СВЯЗ 2,-Ь С СОО ЬЕ Г- ствующими кронштейнами, причем леханизл пеоедач Вряцения ня стол лент "1 по не В ВИДЕ СИЛОВОГО ЦИ :1.ДОЯ. КЕСЛ," СИЯ;2 и- НОГО С ПОСПЕДНИМ ЗВЕНОМ РЛ 1 и, 1 ОН ВОДЯ Вращения инструмента, име;опего шлицевой выходон ьял, и втулки с В.утренним цлицеВыл; ОтВеостием, котооая ш:1 нир 0 сьязана с пос 1 едним зВеном руки, устаОВГеня подВижно В осевом направлении на шлицевол Выходном Валу и подпружиненя Относительно него, 2 шток силового цилидра кинема тически связан с этой вглкой.1569222 Дуг 7 Корректор Н. КПодписное рков ль ного комитета по изобретениям и открыт Москв а, Ж - 35, Раугвска я наб., д. тельский комбинат Патент, г. Ужгооод
СмотретьЗаявка
4379976, 22.02.1988
МГТУ ИМ. Н. Э. БАУМАНА, ПРЕДПРИЯТИЕ ПЯ В-2190
ЛОШКАРЕВ ВЛАДИМИР МИХАЙЛОВИЧ, МЕЩЕРЯКОВ РУДОЛЬФ КОНСТАНТИНОВИЧ, СОЛОВЬЕВ АЛЕКСАНДР ИВАНОВИЧ, ПОСТАНОГОВ ВЛАДИМИР ХАРЛАМПИЕВИЧ
МПК / Метки
МПК: B25J 15/04, B25J 9/00
Метки: манипулятор
Опубликовано: 07.06.1990
Код ссылки
<a href="https://patents.su/5-1569222-manipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор</a>
Привод рабочего инструмента

Номер патента: 729401
Опубликовано: 25.04.1980
Авторы: Вовчук, Головин, Керницкий, Петько, Пукас
МПК: F16H 1/46
Метки: инструмента, привод, рабочего
...электродвигателя, редуктора и насадки.Редуктор включает планетарную и дифференциальную ступень (см. фиг. 2). Солнечная шестерня 10 планетарной ступени связана с валом электродвигателя 1 муфтой 11, эпицикл 12 ее заторможен, а водило 13 связано с солнечной шестерней 14 дифференциальной ступени, Коаксиально расположенные выходные валы 15 и 16 соответственно связаны с водилом 17 и эпициклом 18 дифференциальной ступени. На концах выходных валов 15 и 16 имеются соответственно полумуфты 19 и 20.На валу 7 насадки 4 (см. фиг. 3) имеется полумуфта 21, взаимодействующая с полумуфтой 19, на корпусе насадки 4 полумуфта 22, взаимодействующая с полумуфтой 20.Привод работает следующим образом.Вращение вала электродвигателя 1 через муфту 11...
Устройство крепления рабочего инструмента

Номер патента: 1747260
Опубликовано: 15.07.1992
Авторы: Андреев, Дубровский, Кезик, Кирюшин, Колган
МПК: B25D 17/08
Метки: инструмента, крепления, рабочего
...дает возможность закрепления в устройстве хвостовика 10(фиг.4); имеющего кроме пазов 15 для взаимодействия с запорными роликами 14 пару кулачковцх пазов 22 для взаимодействия с сухарями 25,При этом фиксация радиального положения сухарей 25 обеспечивается с одной стороны секторной проточкой 17 втулки 16, с другой стороны эаплечиками 33 (фиг.4) сухарей 25, не позволяющими последним упасть во внутреннее отверстие направляющего цилиндра 3.Стрелкой в обозначено направление вращения направляющего цилиндра 3 и соответственно хвостовиков 8 и 10 буров 9 и . 11.Устройство работает следующим образом.Установка бура 9, хвостовик 8 которого имеет пару пазов для взаимодействия с запорными роликами 14 (фиг. 1) осуществляется первоначальным...
Устройство автоматического управления положением рабочего инструмента в электроимпульсных установках

Номер патента: 1699012
Опубликовано: 15.12.1991
МПК: H04N 7/18
Метки: инструмента, положением, рабочего, установках, электроимпульсных
...сгнал в момент их совпадения. Поскольку электровзрывные патроны 16, установленные в трубе 15 трубной решетки 14, изготовлены из белого полиэтилена, то пороговый блок 7, на выход которого поступает видеосигнал с телекамеры 2, формируетна своем выходе сигнал в момент, когда электронный луч в телекамере 2 считывает изображение электровзрывного патрона 16. Если коордиНаты рабочего инструмента и электронного луча совпали, т.е. на выходе элемента И 4 также имеется сигнал, то первый ключ 8 открывается и на третий вход блока 1 подается сигнал на формирование электрического импульса на его выходе. Это приводит к подрыву электровзрывного патрона,При установке триггера 11 в положение "1" счетчик 12 начинает счет импульсов, поступающих через...
Устройство для автоматического соединения вала рабочей клети с приводом

Номер патента: 191452
Опубликовано: 01.01.1967
МПК: B21B 35/14
Метки: вала, клети, приводом, рабочей, соединения
...обеспечивают осевое перемещение муфты по валу привода под действием радиально приложенной нагрузки.Это позволяет исключить механизм осевого перемещения муфты при установке клети 15 перпендикулярно оси вала привода и сократить продолжительность перевалок станов.На чертеже представлено устройство для автоматического соединения вала рабочей клети с приводом.При завалке клети в стан клеть вно опускается а станину стана.втулка 1 соприкасается с внешнимющим скосом полумуфты 2, Усилклети благодаря скосу создает осеву ку,на муфту и пружина 3 сжимаетсмуфта отходит в сторону редуктора,возможность клети опускаться. Продскользить по,внешнему, а затем по внему скосу, клеть встает на место в стМуфта пружиной 3 подается на зувтулку, зуб вводится в...
Гидромеханический привод вращения хобота ковочиого манипулятора

Номер патента: 236956
Опубликовано: 01.01.1969
Авторы: Гор, Кожевников, Мещерин
МПК: B21J 13/10
Метки: вращения, гидромеханический, ковочиого, манипулятора, привод, хобота
...цилинлрс 1 7 )ки,кости пОЛ Высоки) Лс)Влснием по 10 сть ЦилинДРс 6 СОООЩс)ЕТС 5 СО СЛИВОМ И ОЛДГОЛс 1 Р 51 ВОЗВРВТ- ном) нилин;ру 20 плун)кер цилицлра 6 соир 1 идст солостои цод. Плтнжер цилиндра 21 возвращается ь то Время, когда илунжср цилиндра 7 совершает рабочий цод. Также работают возврггные цилиндры 22 и 2), Все Возвратные цилиндры иолпитывдются от одного насоса 11 низкой ироизво;Птельиости. Ддвлен е В сети возврдтныц цилиндров регул:рус тел клапаном 2-1. Длл попеременного ВКЛОЧЕНИ 51 Рс)бОЧИЦ ЦИЛИНЛРОВ СЛМЖс 1 Т КОНЕЧ- иье ВыклОчдтели 26) - 2.Во всец муфтац свооолного цолд ндружне Обой)1 Ы 29 - )2 ЖЕХТКО СОЕЛИНЕНЫ С Вд,1 ОМ с)с д звезлочки ).) - 36 - с зуочдтыми колесами ;57 - -10, которые приводятся Во вращение рейками 0, 9...