Манипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1569223
Автор: Евневич
Текст
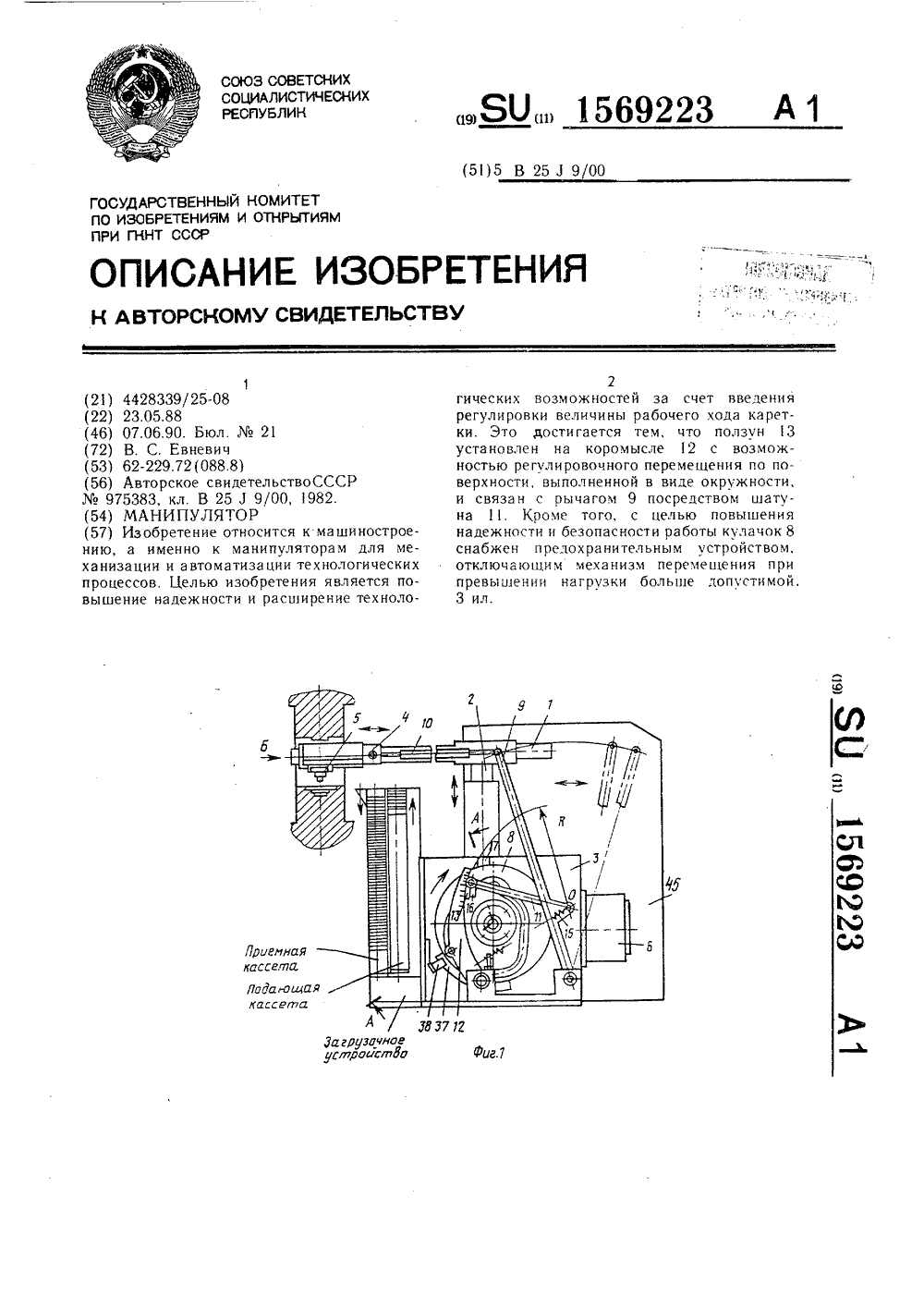
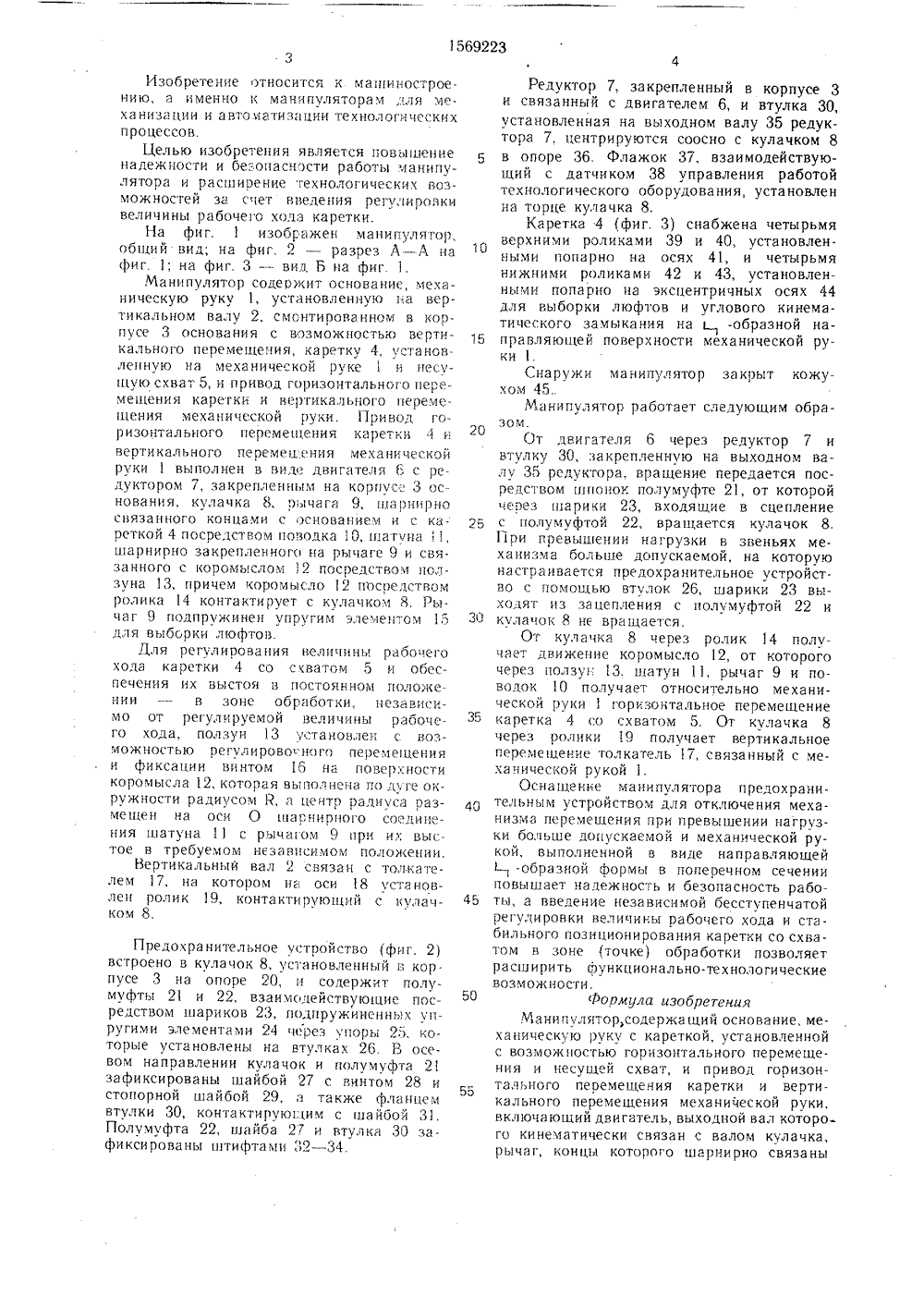
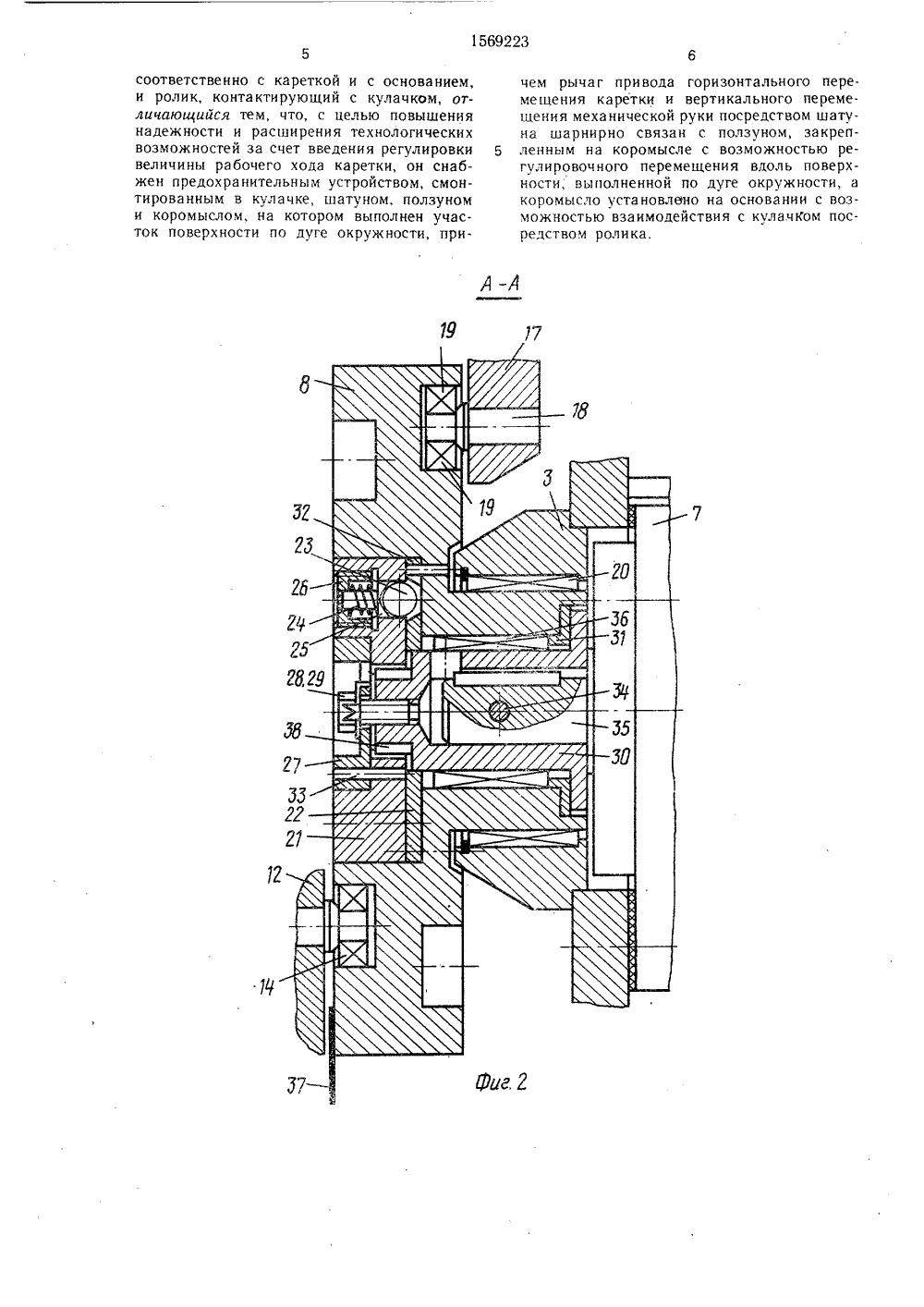
)5 В 25 1 ПИСАНИЕ ИЗОБРЕТЕА ВТОРСНОМУ СВИДЕТЕЛЬСТВУ оСССР982. к маши торамтехнология являирение ностроедля меических ется по- технолоЗреем ассещ адао кассы да грутаюае услграйсгпда иг.7 ОСУДАРСТВЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМРИ ГКНТ СССР(57) Изобретение относитсянию, а именно к манипуляханизации и автоматизациипроцессов. Целью изобретенвышение надежности и расш гических возможностеи за счет введения регулировки величины рабочего хода каретки. Это достигается тем, что ползун 13 установлен на коромысле 12 с возможностью регулировочного перемещения по поверхности, выполненной в виде окружности, и связан с рычагом 9 посредством шатуна 11. Кроме того, с целью повышения надежности и безопасности работы кулачок 8 снабжен предохранительным устройством, отключающим механизм перемещения при превышении нагрузки больше допустимой, 3 ичИзобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации технологических и роцессов.Целью изобретения является повышение надежности и безопасности работы манипулятора и расширение технологицеских возможностей за счет введения регулировки величины рабоцего хода каретки.На фиг. 1 изображен манипулятор, обцсий вид; на фиг. 2 -- разрез АА на фиг. 1; на фиг. 3 - вид Б на фиг. .Манипулятор содержит основание, механическую руку 1, установленную:а вертикальном валу 2, смонтированном в корпусе 3 основания с возможностью вертикального перемещения, каретку 4, установленую ьа механицеской руке 1 и несущую схват 5, н привод горизонтального перемещения каретки и вертикального перемещения механической руки. Привод горизонтального перемещения каретки 4 и вертикального перемещсния механической руки 1 выполнен в виде двигателя 6 с редуктором 7, закрепленным на корпус;. а основания, кулач(я 8, рьцага 9, шаирго связанного концами с основанием и с кареткой 4 посредством поводка 10, шатуна 11, шарнирно закрепленного на рьчаге 9 и связанного с коромыслом 12 посредством ползуна 13, причем коромысло 12 посредством ролика 14 контактирует с кулачком 8, Рычаг 9 подпружинен упругим элемен;ом 15 для выбс рки люфтов.Для регулирования величины рабоцего хода каретки 4 со схватом 5 и обеспечения их выстоя в постоянном положении - в зоне обработки, независимо от регулируемой величины рабочего хода, ползу 3 установлен с возможностью регулировоного перемещения и фиксации винтом 16 на повехности коромысла 12, которая выполнена по луге окружности радиусом )х, и центр радиуса размещен на оси О шарнирного соединения шатуна 1 с рычагом 9 при их выстое в требуемом независимом положении.Бертикальныи вал 2 связан с толкателем 17, на котором на оси 18 установлен ролик 19, контактрующий с кулачком 8. Предохранительное устройство нефиг. 2) встроено в кулачок 8, установленный п корпусе 3 на опоре 20, и содержит полу- муфты 21 и 22, взаимодействующие посредством шариков 23, полпружинс и ных уг - ругими элементами 24 через уорь 2,", которые установлены на втулках 26. Р осевом направлении кулачок и олумуфта 21 зафиксированы шайбой 27 с винтом 28 и стопорной шайбой 29, а также фланцем втулки 30, контактируюьсим с шайбой 31. Полумуфта 22, шайба 27 и втулка 30 зафиксировань цтиста 32 - 34,1 О 5 20 и 30 35 40 45 50 55 Редуктор 7, закрепленный в корпусе 3 и связанныч с двигателем 6, и втулка 30, установленная на выходном валу 35 редуктора 7, центрируются соосно с кулачком 8 в опоре 36. Флажок 37, взаимодействующий с датчиком 38 управления работой технологического оборудования, установлен на торце кулачка 8.Каретка 4 (фиг. 3) снабжена четырьмя верхними роликами 39 и 40, установленными попарно на осях 41, и четырьмя нижними роликами 42 и 43, установленными попарно на эксцентричных осях 44 для выборки люфтов и углового кинематического замыкания на -образной направляющеи поверхности механической руки 1.Снаружи манипулятор закрыт кожухом 45.Манипулятор работает следующим образом.От двигателя 6 через редуктор 7 и втулку 30, закрепленнуо на выходном валу 35 редуктора, вращение передается посредством шпонок полумуфте 21, от которой через шарики 23, входящие в сцепление с полумуфтой 22, вращается кулачок 8. При превышении нагрузки в звеньях механизма больше допускаемой, на которую настраивается предохранительное устройство с помощью втулок 26, шарики 23 выходят з зацепления с полумуфтой 22 и кулачок 8 нс вра щается.От кулачка 8 через ролик 14 получает движение коромысло 12, от которого через ползу: 13, шатун 11, рычаг 9 и поводок 10 получает относительно механической руки 1 горизонтальное перемещение каретка 4 со схватом 5. От кулачка 8 через ролики 19 получает вертикальное перемещение толкатель 17, связанный с механической рукой 1.Оснащение манипулятора предохранительным устройством для отключения механизма перемещения при превышении нагрузки больше допускаемой и механической рукой, выполненной в виде направляющей-образной формы в поперечном сечении повышает надежность и оезопасность работы, а введение независимой бесступенчатой регулировки величины рабочего хола и стабильного позиционирования каретки со схватом в зоне уточке) обработки позволяет расширить функционально-технологические возможности.Формула изобретенияМанипулятор, содержащий основание, механицескую руку с кареткой, установленной с возможностью горизонтального перемещения и несущей схват, и привод горизонтального перемещения каретки и вертикального перемещения механической руки, включающий двигатель, выходной вал которого кинематически связан с валом кулачка, рычаг, концы которого шарнирно связанысоответственно с кареткой и с основанием, и ролик, контактирующий с кулачком, отличаюиийся тем, цто, с целью повышения надежности и расширения технологических возможностей за счет введения регулировки величины рабочего хода каретки, он снабжен предохранительным устройством, смонтированным в кулацке, шатуном, ползуном и коромыслом, на котором выполнен участок поверхности по дуге окружности, причем рычаг привода горизонтального перемещения каретки и вертикального перемещения механической руки посредством шатуна шарнирно связан с ползуном, закреп ленным на коромысле с возможностью регулировочного перемещения вдоль поверхности, выполненной по дуге окружности, а коромысло установлено на основании с возможностью взаимодействия с кулацКом посредством ролика.Сост а в и тел ь А. Ши ряев аРедактор О. Юрковецкая Техред И. Верес Корректор Н. Ко,Заказ 1420 Тираж 691 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГК.113035, Москва, Ж - 35, Раушская наб., д. 4/5Производственно-издательский комбинат Патент, г. Ужгород, ул. Гага 1 ц: га
СмотретьЗаявка
4428339, 23.05.1988
ПРЕДПРИЯТИЕ ПЯ А-1594
ЕВНЕВИЧ ВЛАДИМИР СТЕПАНОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор
Опубликовано: 07.06.1990
Код ссылки
<a href="https://patents.su/4-1569223-manipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор</a>
Устройство для перемещения каретки пишущей машины с удвоенным шагом

Номер патента: 1475825
Опубликовано: 30.04.1989
Авторы: Воищев, Таранченко, Эльберт
МПК: B41J 19/58
Метки: каретки, перемещения, пишущей, удвоенным, шагом
...смещен по горизонтали относительно нижнего выступа С (1) на вели 5 1 О 15 20 25 30 35 40 45 50 55 2чину перемещения каретки на шаг, то упор 17 собачки 16, взаимодействуя с верхним выступом Т, обеспечивает в дальнейшем при печати перемещение собачки 16 на два шага. Зуб И собачки 16, взаимодействуя с храповым колесом 10, на которое посредством каретки 13, зубчатой рейки 12 и шестерни 11 действует пружина тягового барабана (не показан), обеспечивает перемещение каретки 13 на два шага.В режиме перемещения каретки на полшага необходимо разблокировать клавишу 1 управления и осуществить более глубокое ее нажатие. При этом собачка 21, устанавливаясь площадкой Н с зазором П под выступ Д поворотного рычага 6, под действием пружины 22...
Устройство перемещения каретки

Номер патента: 1358256
Опубликовано: 15.06.1991
Авторы: Гявгянен, Овсянников, Попов
МПК: B23Q 7/00
Метки: каретки, перемещения
...поверхности отверстия 4 каретки 3. Сужающиеся частисопл 8 и 9 образуют кольцевые щели12 на цилиндрической поверхности отверстия 4. Сопла 8 и 9 предназначеныдля преобразования потенциальнойэнергии сжатого воздуха в кинетическую энергию потока воздуха, истекающего из сопла. Если геометрическиепараметры сопл 8 и 9 соответствуютзакономерностям, характерным для сопла Лаваля, то истекающий из сопл 8 Изобретение относится к области машиностроения и может быть йспользовано в качестве исполнительного ме 8256и 9 поток воздуха ускоряется досверхзвуковых скоростей. Подключениек пневмосистеме того или иного сопла8 и 9, а также отключение их осуществляется системой автоматического управления,Возможен вариант исполнения устройства, когда каретка 3...
Устройство для дифференцированного перемещения каретки

Номер патента: 554174
Опубликовано: 15.04.1977
Авторы: Белоусов, Ковтунов, Падалка
МПК: B41J 19/58
Метки: дифференцированного, каретки, перемещения
...винтом каретки, и спусковой механизм, связанный со средством его управления, отличающееся тем, что, с целью упрощения конструкции и повьппения надежности устройства, спусковой механизм выполнен в виде одинарной роликовой муфты свободного хода двустороннего действия, обойма которой закреплена неподвижно, звездочка связана с ходовым винтом, а средство для управления спусковым механизмом представляет сооой 1 аовый электродвгате)ь, а роторе которого закреплена вилка роликовой муфты.Источники информации, принятые во внимание при экспертизе:1. Патент США3.707.214, кл. 197 - 53, опубл. 1972.2. Патент С 1 ЦА2.636,588, кл. 197 - 90, опубл. 1953. стве спусковой механизм выполнен в виде одинарной роликовой муфты свободного хода двустороннего...
Устройство для перемещения каретки печатающего аппарата

Номер патента: 859205
Опубликовано: 30.08.1981
МПК: B41J 19/26
Метки: аппарата, каретки, перемещения, печатающего
...дифференциала, оговоренными выше, поворачивается по часовой стрелке на угол в .Иь). Это движение2водила 16 передается на центральное зубчатое колесо 21 второго дифферен-. циала, которое поворачивается на угол - - (11).2УчитыВая, что центральное зубчатое колесо 4 застопорено, о(,4. = О, водило 3, получая движение от зубчатого колеса 21 через сателлиты.19, 20, поворачивается против часовой стрелки иа угол -В.(И . Движение водила 3 через зубчатое колесо 2 передается барабану 1, который новорачивается на угол - -что соответствует перемещению каретки иа ,один шаг в прямом направлении.Прямое движение каретки на два шага осуществляется следующим образом.Для перемещения каретки 23 в прямом направлении на два шага на электромагниты 11 и 12...
Устройство для перемещения каретки

Номер патента: 1113232
Опубликовано: 15.09.1984
Авторы: Горштейн, Сильченко, Шихман
МПК: B23K 37/02
Метки: каретки, перемещения
...с возможностью взаимодействия с дополнительным колесом и соединенного одним концом непосредственно с про-.тивовесом, а другим - через пружину сжатия и стержень с нажимным кулачком, взаимодействующим с конечным выключателем-с кареткой, механизм подъема каретки снабжен кулачАовой муфтой, установленной на приводном валу, одна из полумуфт кулачковой муфты жестко соединена с ра бочим колесом, другая - с дополнитель- ным, при этом концы рабочего гибкого зве. на соединены с кареткой и противовесом непосредственно, а дополнительное колесо с соединенной с ним полумуфтой установлены на приводном валу свободно с возможностью поворота относительно полу- муфты рабочего колеса на угол, соответствуюгций ходу конечного выключателя до его...
Предыдущий патент: Манипулятор
Следующий патент: Привод захвата
Случайный патент: Устройство для построения пространственных