Патенты с меткой «роботом-манипулятором»
Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера

Номер патента: 455322
Опубликовано: 30.12.1974
Авторы: Ерош, Марьяновский, Шецен
МПК: G05B 15/00
Метки: конвейера, круглых, предметов, роботом-манипулятором, систем, технологического, центров
...разряда, а через коныоцктор обратного сдвига 14 - с пулевым входом триггера предыду. щего разряда. Конъюнкторы 13 всех разрядов подключены к единичному выходу триггера сдвига 10, а коныонкторы 14 - к нулевому выходу триггера сдвига 10. Единичные выходы триггеров 12 регистра 11 подключены к пер. вым входам соответствующих коныонкторов записи 15, вторые входы которых подключены к выходу делителя частоты 5. Выходы конь. юнкторов записи 15 подсоединены к соответ. ствующим входам регистра памяти 1 б,Устройство работает следующим образом.Линейка фотодатчиков 1 располагаетсяад лентой конвейера перпендикулярно направлению его движения, Число фотодатчиков п расстояние между ними определяются шириной ленты конвейера и требуемой точностью...
Система управления промышленным роботом-манипулятором

Номер патента: 474434
Опубликовано: 25.06.1975
Авторы: Кобринский, Корендясев, Саламандра, Тывес
МПК: B25J 3/04
Метки: промышленным, роботом-манипулятором
...14, двухпозиционный электрогидрозолотник 15, насосную станцию 16, аккумулятор давления 17, трехпозиционный золотник 18, усилитель 19, датчик 20 скоросчи непрограммируемого привода.Система управления работает следующим образом.Сигналы программного устройства 3, характеризующие траекторию и скорость движения схвата робота-манипулятора 1, отрабатываются программируемым приводом 4 с помощью золотника 5 и датчиков положения обратной связи (на схеме не показаны). При этом объект 2 перемещается в соответствии с наложенными внешними связями. В полостях программируемого привода 4 установлены датчики 7 и 8 изменения давления. От программного устройства 3 в цепь управления непрограммируемого привода 6 устройством 9 включается датчик изменения...
Устройство для управления адаптив-ным роботом-манипулятором

Номер патента: 812561
Опубликовано: 15.03.1981
Авторы: Каляев, Носков, Чернухин
МПК: B25J 3/00
Метки: адаптив-ным, роботом-манипулятором
...логических,сигналов возбуждения через этиключевые элементы 9. Ключевые элементы 9, соответствующие конечнымцелевым положениям, выделяются блоком формирования модели внешнейсреды 2 в общем случае на основании,информациипоступаемой от блока 1сенсорных датчиков, и в частном случае могут выделяться на основанииинформации предварительно занесеннойв блок формирования модели внешнейсреды 2. При этом блок 2 формируетна информационном входе ключевогоэлемента 9, соответствующего конечному положению, единичный сигнал, врезультате чего данный ключевой элемент становится генератором сигналавозбуждения, который поступает налогические входысоседних ключевыхэлементов 9 после снятия общего запрещающего сигнала с выхода дешифратора 8, Дешифратор 8...
Устройство для управления адаптивным роботом-манипулятором

Номер патента: 1291388
Опубликовано: 23.02.1987
МПК: B25J 13/00
Метки: адаптивным, роботом-манипулятором
...состояние. Одновременно по сигналу блока 11 тактильных датчиков срабатывает блок 10 возврата в предыдущее положение и вырабатывает на основе ранее запомненной информации сигналы, которые, поступая на блок 7 приводов, возвращают робот-мани - пуляторов в предыдущее положение.Окончание отработки элементарного шага возврата также фиксируется блоком 8 датчиков положения и, следовательно, дешифратора 9 положения, который вырабатывает запрещающий сигнал на своем втором выходе и тем самым прекращает работу блока 10 возврата в предыдущее положение.После этого процедура моделирования кратчайшего пути, выделения первого шага и отработка его блоком 7 приводов возобновляется, но уже при условии, что ключевой элемент 12, соответствующий положению...
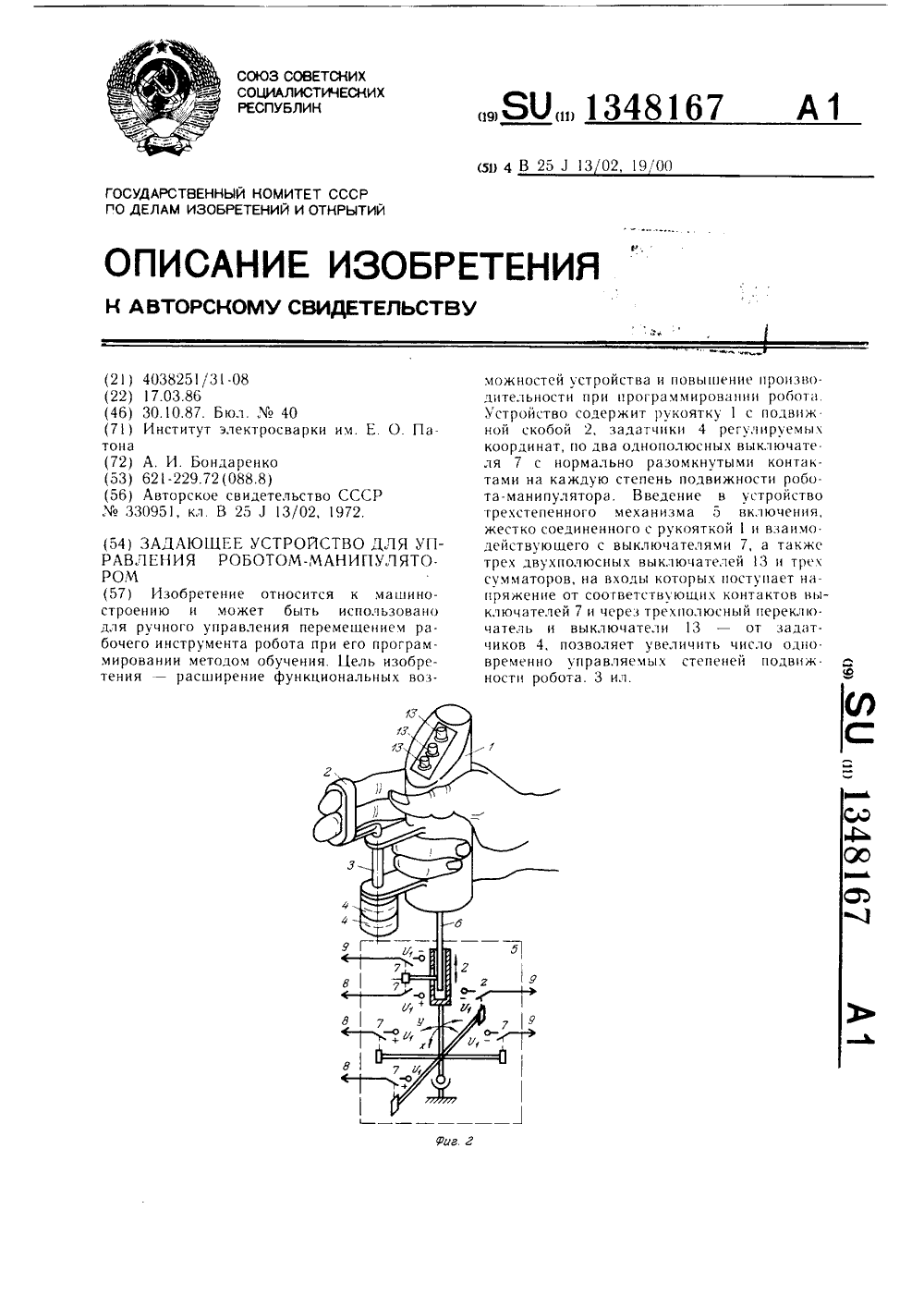
Задающее устройство для управления роботом-манипулятором
Номер патента: 1348167
Опубликовано: 30.10.1987
Автор: Бондаренко
МПК: B25J 13/02, B25J 19/00
Метки: задающее, роботом-манипулятором
...и 9 на соответсгвующие вхолы сумматоров 16 поступают сигнал (.1 Выходные сигналы, сфор. мированные сумматорами 16, поступают в систему управления роботом, в результате чего рабочий инструмент робота булет лвигаться по лвум коорлинатам. Величина сигнала нд выходе сумматоров опрелеляется выражением) ) ,= К(.) ,гле К= -- коэффициент усиления суммаК,тора.Так как величина перемещения Х)У, то оператор при выводе рабочего инструмента в точку В периолицески отключает движение по координате У.Для сокращения времени перемещения рабочего инструмента по координате Х оператор устанавливает Лвухполюсный трех- позиционный переключатель 12 в положение 1 или 11 (в зависимости от требуемого направления движения рабочего инструмента) и с помощью большого...
Задающее устройство для управления роботом-манипулятором

Номер патента: 1565680
Опубликовано: 23.05.1990
Авторы: Кихней, Лясота, Филаретов, Юрчик
МПК: B25J 13/02, B25J 19/00
Метки: задающее, роботом-манипулятором
...сроиствам (приводами) 15 роботаиз,уляторя О, В суставах которого усПи цлсць датчики6 .1(оложеция, сосд(Псцць . с Входом ЗВМ 4.:-:Я сзюцсс устройство работает следую 00 Р с 1 ЗОМ.рс,сцоложцч, что схват 9 необходимо (с ( мс стц Гь ц направлении ьсктора1. Дляо Оцсратор сначала (тпиецтируст стрелВ 11 ПРЯ Вл(с ни и, па Рс 1 ллсл ьном напЯВ. ,"С,.Ю ЖЕЛЯСМОО ДВИЖСЦИЯ (ВДОГ 1 Ь ВЕКТОРЯя ззт( и . 1 Вс,сс:ис м цотен циомет- Э 13 (ЗЯ (с(1 сЕс 1 СкорОГ И ) ИЗ НЗЧЗЛЬНОГ .И), (сКСгп":5 ЗЗДЗ(Т СКОРО(ГЬ ДВИЖ(.НИ 51 "хц;Г( 1; задацм:(з 1;ЗБлсниц. Возв)с 1 цсП(ТСЦЦИОМСТ;)ЯБ Нс(13,ЦНОЕ ПОЛО; 1(С С (: Ц(РЯ Г Р .(Г)Сл Рс( П(сс 1 СТ,;ВЦ Ж(.Ц ИЕ М Я -,1,; 5 ГО)ЯВр)1 цсцц с", резки Вокруг ссей 41 СсЦОТСЯ ДсГЧ ИКИ 0 И , ИНфОР. 5 я ц(згс 1...
Устройство для управления роботом-манипулятором

Номер патента: 1585145
Опубликовано: 15.08.1990
МПК: B25J 13/00
Метки: роботом-манипулятором
...управления работает следующим образом. ЗОЧеловек-оператор с помощью задающего органа 1 задает нектар Х, который в виде вектора 0,(Х( по- ступает н блок 2 формирования управляющих сигналов, где преобразует по заданному закону и в соответствии с кинематикой исполнительнага органа в,нектар 0 (У(С = Ф(Х(С, пропорциональный, например, вектору У(с) скоростей относительного перемещения звеньев исполнительного органа робота. Затем вектор 0 (7( поступает в блок 3 вычисления отношений, и который иэ блока 4 уставак поступаеттакже вектор Б(У )1 Аакс)пропорциональный вектору 7максимально ,возможных скоростей относительного перемещения звеньев исполнительного органа. Из блока 3 вычисления атношений вектор О .( - , .=1,п) помоксступает в блок 5...