B25J — Манипуляторы; камеры, оборудованные манипуляторами
Тактильный сенсор робота

Номер патента: 1491699
Опубликовано: 07.07.1989
Авторы: Антонов, Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 15/00
Метки: робота, сенсор, тактильный
...сенсор робота содержит два слоя цилиндрических упругих баллонов 1 и 2, заполненных рабочей средой, Баллоны в каждом слое установлены параллельно друг к другу с касанием по боковой поверхности. При этом баллоны 2 нижнего слоя закреплены на очувствляемой рабочей поверхности 3 схвата робота, а оси баллонов 2 перпенликулярны осям баллонов 1 верхнего слоя, Торцы баллонов снабжены подвижными электрическими контактами 4, напротив которых установлены металлические пластины 5 и 6, образующие общую шину. Резисторы 7 и 8 образуют две группы, в которых резисторы соединены последовательно, причем выводы резисторов одной группы с)единены с соответствующими контактами 4 баллонов верхнего слоя, а выводы резисторов другой группы - с соответствующими...
Захват манипулятора

Номер патента: 1491700
Опубликовано: 07.07.1989
Автор: Лебедев
МПК: B25J 15/00
Метки: захват, манипулятора
...Концом штока 5 поршня 2 за палец 7 верхняя губка 6 вместе с упором 11 удерживается в поднятом цад нижней глкой 13 положении. Верхняя поисрхцость губки 13 расположена на одном уровне с матрицей 24 штампа. Ниж. цяя губка 13 с цолзуном 14 удержцвастся ц крайнем левом положении пружиной 7 через палец 16, упираюгцийся ц цаправляюцсхю основания 5.5 10 15 20 25 30 35 40 45 50 55 4При движении захвата справа налево верхняя губка 6 заходит в пространство между матрицей 24 и пуансонами 25, а нижняя губка 13, упершись в основание штампа, заходит в направляющие, при этом ползун 14 растягивает пружину 17.После окончания этого движения захвата следует сброс давления из штоковой полости 4 корпуса 1, после чего поршень 2 под действием пружины 3...
Многопозиционный захват промышленного робота

Номер патента: 1491701
Опубликовано: 07.07.1989
Авторы: Апатов, Васильевых, Вахрушев
МПК: B25J 15/00
Метки: захват, многопозиционный, промышленного, робота
...которого установлен якорь 8 электромагнита 9, установленный в губке 1 и подпружиненный пружиной 1 О. Губкакрепится через упругую прокладку 11 с помощью планки 12 к корпусу 13, жестко связаного с рукой робота. В полости корпуса расположен электромагнитный вибратор 4, фиксируемый крышкой 5, через отверстие которой проходит сердечник 16, связанный с губкой . Он подпружинен относительно корпуса пружиной 17. Губка 1 дополнительно снабжена направляющими втулками 18, взаимодействующими с фиксаторами, установленными в сборочной позиции (не показаны).Многопозиционный захват работает следующим образом.Для загрузки захвата он переносится промышленным роботом к загрузочному устройству и заполняется группой деталей. После чего к обмотке...
Вакуумный схват

Номер патента: 1491702
Опубликовано: 07.07.1989
МПК: B25J 15/06
...которой сообщается с внутренней полостью стакана 17. Для герметизации между движущимися деталями установлены уплотнительные кольца 20. Шпонки 21 предназначены лля пре. Лотвращения цроворачивания подвижных относительно корпусастакана 17 и золотника 4.Вакуумный схват работает следующим образом. Вакуумный схват, закрепленный на руке манипулятора, ориентируется относительно детали. В исходном положении зубья 11 расположены в пазах 9 вкладыша 6. Золотник 4 пол действием пружины 5 упирается во втулку 12, при этом его ка. палы 7 соединены цосрелством каналов 3 с атмосферой, причем каналы 7 соединены с полостью присоски 19. Стакан 17 под действием пружины 18 находится в отжатом от корпуса состоянии. При опускании руки манипулятора присоска 9...
Захват манипулятора

Номер патента: 1491703
Опубликовано: 07.07.1989
Авторы: Асаналиев, Рахматов, Усубаматов
МПК: B25J 15/06
Метки: захват, манипулятора
...на фиг. 2 - вид А на фиг. 1. Захват манипулятора содержит планку 1, соединенную с поджимной шайбой 2 посредством болтов 3. Поджимная шайба 2 фиксирует положение шаровой опоры 4 на корпусе 5. Корпус 5 жестко соединен с рукой манипулятора 6. В полости корпуса 5 расположена мембрана 7, соединенная с тягой 8. Тяга 8 крепится гайками 9 на планке 1. На корпусе 5 и поджимной шайбой 2 установлены уплотнения 10 и 11. На шаровой опоре 4 закреплена присоска 12 с несколькими рабочими полостями, что позволяет удерживать несколько деталей 13 в 15.Захват манипулятора работает следую(цим образом.Рукой манипулятора 6 присоску 12 ориентируют относительно захватываемых деталей 13 15. Далее захват опускают и присоска с помощью шаровой опоры 4 само-...
Схват манипулятора

Номер патента: 1492495
Опубликовано: 07.07.1989
Авторы: Бомко, Коноплянко, Ручка
МПК: B25J 15/00, H05K 13/02
Метки: манипулятора, схват
...21.Схват работает следующим образом.В свободном состоянии манипулятора с пристыкованным схватом клинья 11 несущей П-образной рамы 1 расположены в ответных пазах тяги 14 привода 17, Клинья 12 и 13 П-образных рам 4 и 9 расположены в ответных пазах тяг 15 и 16 привода 17. Тяги сдвинуты одна к другой (диаграмма снизу фиг.1). Тяги 15 и 16 оттянуты нпривод захвата манипулятора, например, своими электромагнитами, При этом планки 3 и 8 схвата раздвинуты. В этом состоянии манипулятор подводит схват к магазину пустыхплатПосле этого опускается тяга 15 манипулятора, смещается вперед, Под действием пружины 6 планки 3 сдвигаются одна к другой, фиксируя н своих зажимных губках 5 плату 21. При этом в процессе поворота звеньев 2 плата 21 прижимается...
Манипулятор

Номер патента: 1493457
Опубликовано: 15.07.1989
Авторы: Быков, Кичаев, Мартовицкий, Стебницкий, Трубачев, Федерякин
МПК: B25J 11/00, B25J 9/00
Метки: манипулятор
...8, 9, 10 и перемещаются поступательно от дополнительных приводов 17, 18, 19. Установленные на каждом звене схваты 11, 12, 13 поворачиваются вокруг своих звеньев 2, 3, 4 от приводов 4, 15, 16. Любой из схватов 11, 12, 13 может взять и переместить объект 21 манипулирования или зафиксироваться на выдвижной опоре 20. 2 ил. оси предшествующего звена. На основанииманипулятора установлены выдвижные опоры 20 для фиксации на них схватов 11, 12 и 13 (на фиг. 1 показана одна опора 20, на которой зафиксирован схват 12). Для примера в схвате 13 показан объект 21 манипулирования.Манипулятор работает следующим образом.Исполнительные звенья 2, 3 и 4 поворачиваются на основании 1 и относительно друг друга от приводов 9, 8 и 10 и перемещаются...
Способ управления виброприводом манипулятора

Номер патента: 1493458
Опубликовано: 15.07.1989
Автор: Флейтман
МПК: B25J 13/00
Метки: виброприводом, манипулятора
...точном позиционировании.Устройство для реализации предлагаемого способа содержит синхронный электродвигатель 1, связанный через электромагнитную муфту 2 с выходным звеном 3. Обмотки двигателя 1 и муфты 2 подключены к системе 4 управления, например микропроцессорной. бСпособ осуществляется следуюазом. Возбуждают крутильные колебания ного вала электромагнитной муфты хронным электродвигателем 1. Для иа обе обмотки статора двигателя 1 ход- синтого ооче(21) 4145 20/31-08(54) СПОСОБ УПРАВОДОМ МАНИПУЛ(57) Изобретение отни может быть испольисполнительных меха- повышение точностиозбуждают колебания ромагнитной муфты 2 вигателем 1, поочередобмотки импульсы поя от системы управлеии выходным звеном 3 ия увеличивают часто- нного напряжения до вующей...
Устройство для управления схватом манипулятора

Номер патента: 1493459
Опубликовано: 15.07.1989
МПК: B25J 13/00, B25J 3/04
Метки: манипулятора, схватом
...1 ил. тель 8. 11 аговьй привод 7 включается, и губки 1 хвата начинают сходиться. Гри сжатии обькта 2 с силой, достаточной для срабатывания датчика 3, последний выдает единичный сигнал, который инвертируется и поступаеп на вход элемента И 13. Этот нулевой сигнал препятствует прохождению импульсов от генератора 14 и элемента И 12 через элемент И 13 к кольцевому распрдели гелю 8 т. е. происходит отключенишапвого привода 7 от генератора 14 импульсов. Если теперь при подъеме объекга 2 он начинит выскальзывать е схвата, го ролики 4, о вп ченные лентой 5, начинают проворачгва;.а 1 ри этом на выходе датчика 6 появ.к" импульсь, которые через элемент И 9 , ноп- цевой распределитель 8 поступают и;. и вый привод 7. Происходит поджатиг Ьк...
Исполнительный орган манипулятора

Номер патента: 1493460
Опубликовано: 15.07.1989
Авторы: Домрачев, Самородова, Ямпольский
МПК: B23P 19/00, B25J 15/00
Метки: исполнительный, манипулятора, орган
...втулкой 5, деформируя при этом упругие элементы 11 и 16,В случае торцового контакта возникающие при взаимодействии собираемых деталей усилия направлены перпендикулярноторцовым поверхностям деталей и действуютпо цепочке элементов: удерживаемая деталь,захват 3, проушины 17, подпятники 18, жесткие стержни 15, подпятники 19, пьезокерамические элементы 20, промежуточное кольцо 2, упругие элементы 11, гибкие звенья 10,якоря 9, электромагниты 7, фланец 6, корпус1, промышленный робот. При торцовом взаимодействии соединяемых деталей не происходит смещения присоединяемой детали 4в сторону отверстия базовой втулки 5, Приэтом на измерительных электродах пьезо 15 керамических элементов 20 появляется разность потенциалов, сигнализирующая о...
Схват манипулятора

Номер патента: 1493461
Опубликовано: 15.07.1989
Автор: Кудрявцев
МПК: B25J 15/00
Метки: манипулятора, схват
...и является дополнительным к а. с. по заявке4220904/ /08.1.1 езь изобретения - повышение надежности работы схвата за счет установки на корпусе схвата упоров, взаимодействующих с нерабочими поверхностями захватных губок.На фиг. 1 изображен схват манипулятора,общий вид; на фиг. 2 - губка схвата в де формированном состоянии; на фиг. 3 : схват манипулятора в момент введения егов ограниченное пространство рабочей зоны; на фиг. 4 - то же, в рабочем положении.Схват манипулятора содержит губки 1, выполненные в виде плоских упругих пластин Ш-образной формы с произвольным числом концов 2 и 3, губки 1 установлены на корпусе симметрично оси схвата. Концы 3 прикреплены к призме 4, которая жестко связана с корпусом привода 5 деформации...
Исполнительный орган промышленного робота

Номер патента: 1493462
Опубликовано: 15.07.1989
Автор: Кудрявцев
МПК: B25J 15/02
Метки: исполнительный, орган, промышленного, робота
...направляк шие элементы 13и 14 и держатель 11 располагаются вплотную друг к другу и выдвигаются вместе судлинителем, Это двиэкение происходит дотех пор, пока дополнительные барабаны 3с закрепленными концамиибкой тяги (тросика) 15 не остановят свое вращение посредством тормозов в приводах 5, определяя длину вылета удлинителя 7 в этом направлении. После того, как направляющий элемент (колено) 13 перестанет двигаться, начинается движение удлинителясквозь направляющий элемент (колено) 13 через направляющее отверстие, при этом направляющий элемент (колено) 14 и держатель 11 двигаются вместе с ним, а гибкая тяга (тросик) 16 свободно разматывается, проходя через отверстия в направляющем элементе (колене) 13 и держателе 11. Это движение...
Манипулятор

Номер патента: 1495109
Опубликовано: 23.07.1989
Автор: Черняков
МПК: B25J 9/00
Метки: манипулятор
...жестко закреплен и намотан набарабане 4, а другой через блок 7соединен с регулируемой тягой 8,связанной с торцом направляющейштанги 2. Регулируемый упор 9 служитдля ограничения свободного хода гибкого элемента, а винт 10 - для регулирования исходного положения поворотного фланца 3. Ман;:аулятор работает следующим образомПоворотный фланец 3, служащий для крепления исполнительных органов (механизмгв) манипулятора (схват, рука и т.п), совместно со штоком привода .силового цилиндра) 1 гибким элементом 6 совершает прямолинейное перемещение до соприкосновения регулируемой тяги 8 с регулируемым упором 9, положение которого определяет начало вращения фланца 3.В результате взаимодействия регулируемой тяги 8 с регулируемым 30 35 40 45 50...
Устройство для шагового перемещения

Номер патента: 1495110
Опубликовано: 23.07.1989
Автор: Флейтман
МПК: B25J 9/00
Метки: перемещения, шагового
...перемещения, содержащее привод с червячнойпередачей, вибратор для создания крутильных колебаний, установленный наопоре, и платформу, расположеннуюв направляющих, о т л и ч а ю щ ее с я тем, что, с целью увеличенияКПД, колесо червячной передачи связано с вибратором крутильных колебаний,а двигатель привода и связанный сего валом червяк установлены на плат"форме,йдА Фиг.2 Составитель Ф, МайоровТехред М,Дидык Корректор А,Обручар Редактор В, Петраш Заказ 4163/12 Тираж 778 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5 Проиэводстленно-издательский комбинат "Патент", г.Ужгород, ул. Гагарина, 101 Изобретение относится к машиностроению, а именно к...
Lкоординатный манипулятор

Номер патента: 1495111
Опубликовано: 23.07.1989
Авторы: Григорьев, Ивашов, Колискор, Некрасов, Степанчиков
МПК: B25J 11/00, B25J 9/00
Метки: lкоординатный, манипулятор
...элементом 9.На фланце установлено исполнительноеустройство 14,В качестве принодных элементов3 - 8 линейного перемещения можноцсполь- цать пненмоцилиндры или винтовые п редачи с электродвигателями,Конкретное исполнение приводных элементов , - 8 на фиг, 1 не показано.С це.ью обеспечения высокотемпературного прогрева (при установкен сверхнысоковакуумном оборудовании)флацец 2 манипулятора с элементами3 - 8 может отсоединяться от основания манипулятора (фиг. 3).Манипулятор работает следующимобразом.При цзмецсцци длин приводных элементов 3 - Я линейного перемещенияисполнительное устройство на фланцесоцершает днцжецце по шести координатам - тром линейным и трем угловым относительно неподвижного основацця 1, с ф.цронаццая трубя 10...
Устройство для контроля геометрических параметров манипулятора

Номер патента: 1495112
Опубликовано: 23.07.1989
Авторы: Болотин, Гордиенко, Зиндер, Табачник, Федосеенков
МПК: B25J 11/00, B25J 19/00
Метки: геометрических, манипулятора, параметров
...шарнирами звенья 2 - 4 (оси 20шарнирон параллельны),а также фланец 5, содержит основание б с базовой поверхностью 7 для установкиманипулятора 1 и измерительный элемент, выполненный в виде прямолинейной направляющей 8, установленной наповерхности 7, и калиброванной скобы 9, установленной на фланце 5 конечного звена манипулятора,Манипулятор 1 установлен на базоной поверхности 7 основания 6так, что оси шарнирон перпендикулярны продольным осям прямолинейной направляющей 8 и скобы 9,Контроль геометрических параметрон манипулятора, н частности величины смещения оси конечного звена с фланцем 5 относительно оси первого звена 2, осуществляется следующим образом. 40На Сазовой поверхности 7 основали 6 закрепляют манипулятор 1, Выводят...
Манипулятор

Номер патента: 1495113
Опубликовано: 23.07.1989
Автор: Литвиненко
МПК: B25J 11/00
Метки: манипулятор
...3 - привод, разрез; на Фиг. 4 - вид Б на фиг. 3,Манипулятор содержит корпус 1 прямоугольной формы, крепежные петли 2, приводы 3, в зазоре неподвижных частей которых располагаются подвижные части, например Ферромагнитные 20 пластины 4. При этом пластины 4 с по мощью тросов 5 и петель 2 крепятся к руке Ь, которая через тросы 5 и пластины 4 подвешена на пружинах 7, Рука 6 имеет укрепленный на одном 25 конце привод 8 схвата 9 с губками 10, установленный на другом конце этой руки. Схват соединен с приводом тягой, которая проходит внутри ру" ки 6. Корпус манипулятор укреплен на 30 основании 11, Неподвижные части приводов 3 содержат две пары полюсов 12, расположенных один напротив другого, на которых установлены катушки 13. Пластины 4...
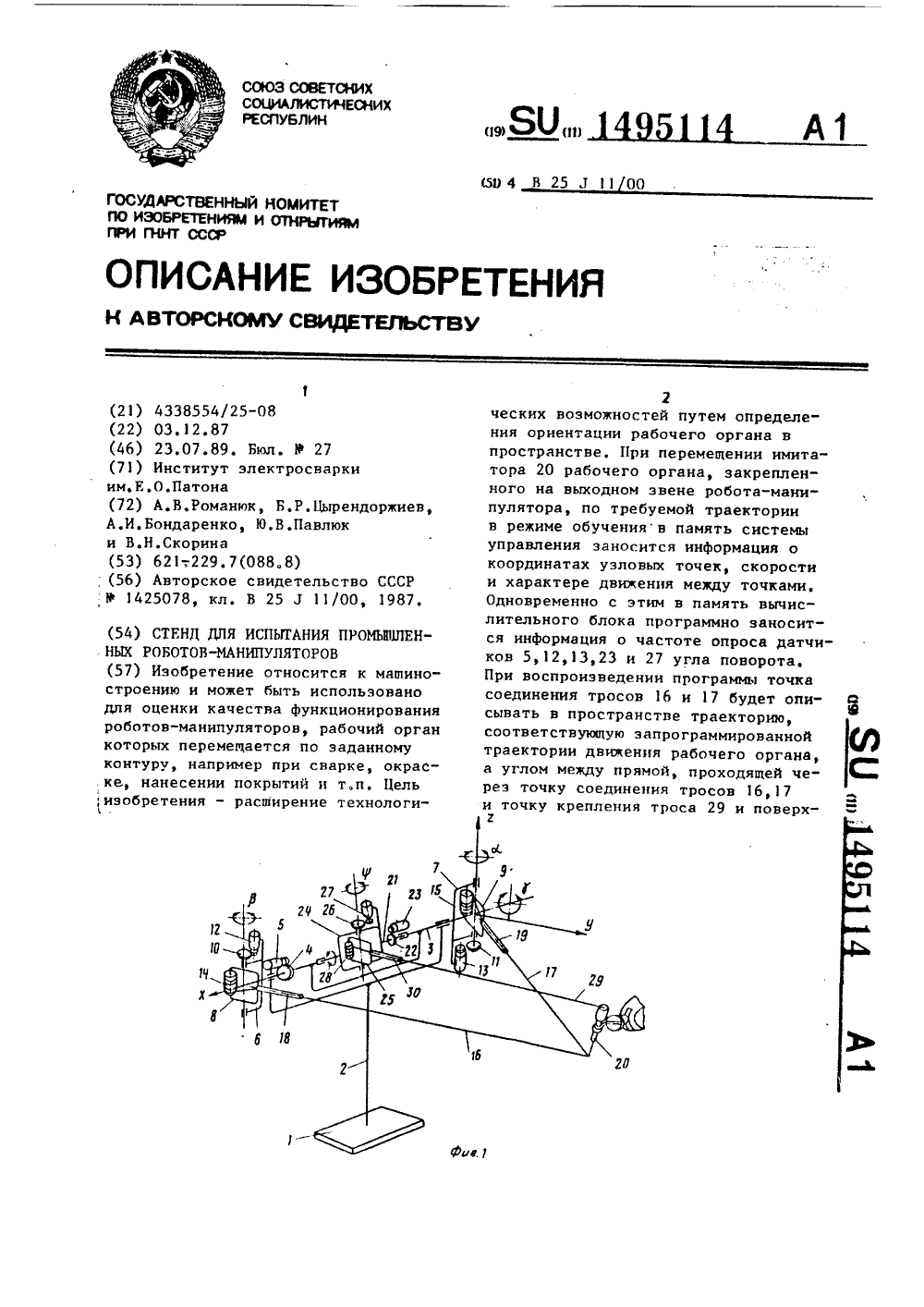
Стенд для испытания промышленных роботов-манипуляторов
Номер патента: 1495114
Опубликовано: 23.07.1989
Авторы: Бондаренко, Павлюк, Романюк, Скорина, Цырендоржиев
МПК: B25J 11/00
Метки: испытания, промышленных, роботов-манипуляторов, стенд
...относительно запрограммированной траектории, Подпружиненные барабаны 14 и 15, соединенные с 40 тросами 16 и 17, и барабан 28, соединенный с тросом 29, вращаются соответствующим образом, обеспечиваяразмотку или намотку тросов 16, 17и 29.45 Поворот рамок 8,9 и 25 осуществляется так, чтобы обеспечиваласьсоосность тросов 16,17 и 29 и направляющих 18,19 и 30, На входе и выходе направляющих 18,19 и 30 уста,новлены рамки для улучшения условийпрохождения тросов по направляющим,обеспечения их соосности и исключения влияния изгибов тросов на показания датчиков 12,13 и 27. Одновременно с поворотом рамок 8,9 и 25через мультипликаторы 10, 11 и 26вращаются датчики 12,13 и 27, показания которых, соответствующие угламЫиповорота тросов 16,17...
Транспортный робот

Номер патента: 1495115
Опубликовано: 23.07.1989
Автор: Гвоздев
МПК: B25J 11/00, B25J 5/02
Метки: робот, транспортный
...10 робот, вид сверху; на фиг. 2 - разрез А-А на фиг. 1.Транспортный робот содержит две аналогичные продольные балки 1, на которых закреплены по два индивиду альных привода 2. На выходных валах приводов 2 закреплены опорные колеса 3. Робот перемещается по направляющим рельсам 4. К каждой продольной балке 1 крепится зубчатая рейка 20 5, а между рейками 5 расположено кинематически связанное с ними зубчатое колесо 6 суммирующего зубчато-реечного механизма. Рейки 5, балки 1 и планки 7 обеспечивают при заторможен ных приводах 2 геометрическую неизменяемость конструкции, К зубчатому колесу 6 крепится основание манипуляционного механизма 8 с захватом 9.Транспортный робот работает сле дующим образом,Если угловые скорости всех приводов 2...
Устройство для управления приводом робота

Номер патента: 1495116
Опубликовано: 23.07.1989
Автор: Исаков
МПК: B25J 13/00, G05B 11/00
...отработки устройствомзаданного значения тока уменьшаетсясигнал рассогласования 11, увеличивается значение выходной координатыБ и сигнал 11 на выходе сумматора 9изменяет свой знак. Изменение знакаприводит к изменению знака выходного напряжения компаратора 10, ивыходной сигнал корректирующего бло"ка 11 начинает плавно уменьшаться,уменьшая тем самым интегральную составляющую сигнала управления электродвигателем.При дальнейшей отработке заданного значения изменяется знак интегральной составляющей, что приводит куменьшению значения сигнала управления электродвигателем по мере приближения выходной координаты к заданному значению, в результате чего повышается динамическая точность устройства.В установившемся режиме работы вустройстве...
Устройство для управления сборочным манипулятором

Номер патента: 1495117
Опубликовано: 23.07.1989
МПК: B25J 13/00
Метки: манипулятором, сборочным
...звено,7 4то на ныходе первого интегратора 14также устанавливается нулевой сигнал, поэтому сигнал на третий входвторого сумматора 4 не подается ипривод 7 останавливается, При этомна выходе интегратора 15 сигналкоррекции, соответствующий новомуположению исполнительного органа 9,сохраняется,Устройство позволяет удерживатькорректирующий сигнал положения навыходе интегратора 15 при отсутствии сигнала (или меньше величинысигнала задания по усилию) с дат"чика 12 усилия в отличие от известного устройства, н котором сигналкоррекции положения пропадает приотсутствии сигнала с датчика 12 усилия, что вызывает рынки исполнительГного органа 9, Кроме того, интеграторы 14 и 15 устройства выполняютсглаживающие функции, повышая динамические...
Схват манипулятора

Номер патента: 1495118
Опубликовано: 23.07.1989
Авторы: Джолдасбеков, Кайнарбеков, Слуцкий
МПК: B25J 15/00
Метки: манипулятора, схват
...сферических пар 7 с пружинами 8. Базисные звенья с помощью подпружиненных поводков 9 и 10 шарнирно соединенных с одним иэ захватных рычагов. Причем шарниры 11, 35 соединяющие поводки и захватный рычаг, снабжены тормозными устройствами 12, выполненными в виде электромагнитных муфт, Оси шарниров 11 на противоположных рычагах 1 и 2 смещены 40 одна относительно другой на некоторое расстояние 3 . Жесткость пружин 13, связывающих захватные рычаги с поводками базовых звеньев, расположенных ближе к периферии рычагов, больше 45 жесткости пружин, размещенных ближе к центру. Губки смонтированы на рычагах одна параллельно другой, при этом между губками, размещенными на одном рычаге, предусмотрены зазоры, обеспе 50 чивающие при захвате...
Захватное устройство

Номер патента: 1495119
Опубликовано: 23.07.1989
Автор: Панов
МПК: B25J 15/00
Метки: захватное
...входит в вотверстие иэделия. Захватные рычаги 3 в это время сжаты (сжимают пружину 4). При соприкосновении упорной втулки 7 с иэдели.ем 16 элементы, связанные с ней - ось 8 с шайбой 9, кулачок 14 и рычаги 3,останавливаются. Продолжающий двигаться вниз корпус 1 своим клиновым упором 2 давит на ролики 6 и, раздвигая двуплечие рычаги 3, сжимает пружину 4.При взаимодействии выступа кулачка 14 с упором 12 паза 11 корпуса (фиг.4, положение 11) корпус останавливается. После этого корпус движется в обратном направлении, а втулка 7 с осью 8, шайбой 9, кулачком 14 и рычагами 3 остается на изделии. Когда кулачок 14, взаимодействуя с упором 13, занимает положение 111 (фиг.5), клиновый упор 2 корпуса 1 прекращает оказывать давление на ролики 6, и под...
Захватное устройство “новокомак-б

Номер патента: 1495120
Опубликовано: 23.07.1989
Авторы: Бац, Коренев, Новоселов
МПК: B25J 15/00
Метки: захватное, новокомак-б
...перемещения. Толкатель 8 через ребра 9 подпружинен пружиной 12 и шарнирно соединен с губками 2. В патрубках 7 размещены с воэможностью перемещения вдоль них грузы 13, связанные с толкателем 8 через гибкие элементы, например гибкие элементы 14, 45 и ребра 9. На внутренней поверхности полого вала 4, в местах его сообцения с патрубками 7, установлены блоки 15 для гибких элементов 14. Ребра 9 же - стко соединены с наружным кольцом подшипника 10, а толкатель 8 - с внутренним кольцом подшипника 10.Устройство работает следующим образом.Двигатель 5 приводит во вращение через тормозную муфту 6 полый вал 4 с патрубками 7, которые передают вращение грузам 13. Под действием центробежных сил грузы 13 перемещаются от оси полого вала 4 к...
Сборочно-захватное устройство

Номер патента: 1495121
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: сборочно-захватное
...до крайнего нижнего положения, ползуны 4 сжимают пружины 9, 1 О и 12, фиксаторы 11 фиксируют пружины 10 в сжатом положении. Захва - тывание детали происходит при перемещении поршня 18 вверх, усилие эахватывания создают три пружины 9 и общая пружина 12. Если в первоначальный момент сборки ввиду смещения между собираемыми деталями возникает контакт по фаскам, то возникающие контактные усилия между фасками собираемых деталей передаются губками 2 через систему рычагов к ползунам 4. В зависимости от направления контактного усилия соответствующий ползун 4 (или два ползуна) перемещается вниз, а остальныв полэуны 4 - вверх, т,е., деталь перемещается по направлению контакт - ного усилия. Перемещение детали начинает происходить при определенном...
Захватное устройство

Номер патента: 1495122
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: захватное
...цилиндра 3 от перемещения вдоль оси штоков, Ползун 6, шарнирно соединенный с концами тяг 7, движется в направляющей 4 в сторону, противоположную движению полэуца 5, а тяги 7 поворачиваются относительно оси соединения двуплечих рычагов 2 с тягами 7,компенсируя разность сил трения ншарнирах и штоках силового цилиндра3, тем салым достигается симметричноеразмыкание зджимных губок.Захват детали происходит в следующем порядке. Открытые эажимные губкиподводят к детали, в бесштоковую полость силового цилиндра 3 подают сжатый гоздух. Сжатая пружина 8 и штокисилового цилиндра 3, воздействуя наднуплечие рычаги 2, сжимают последние. Полэун 5 и ползун 6 со связаннымс ним подвижным элементом 10 движутсян направляющей 4 нанстречу друг другу, а...
Захватное устройство

Номер патента: 1495123
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: захватное
...тягами переменнойдлины и звеньями, имеющими длину,равную длине коромысла, о т л и -ч а ю щ е е с я тем, что, с цельюупрощения конструкции, расширениятехнологических воэможностей путемувеличения номенклатуры эахватываеьых деталей и повышения надежностизахвата, оно снабжено кулисами, шарнирно установленными на оси коромысла, и ползунами, размещенными на кулисах, при этом зажимные губки .закреплены на ползунах,Составитель Б,ПышкинРедактор В 1 етраш Техред М.Дидык Корректор Л.Патай Заказ 4164/3 Тираж 778 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,101 3 14951Изобретение относится к...
Захват для деталей с отверстием

Номер патента: 1495124
Опубликовано: 23.07.1989
МПК: B25J 15/00
Метки: захват, отверстием
...4 от носительно основания 1. На центральную часть корпуса 4 установлен стакан 19, подпружиненный пружиной 9. Деталь 20 установлена на ложементе 21. На позиции разгрузки - стержень 22, 20Захват работает следующим образом.Исполнительный механизм манипулятора опускает руку 2 с захватом к ложементу 21, на котором установлена деталь 20. В этот момент упор 10 на ходится под действием пружины 9 в нижнем положении, упираясь ограничителем 11 в нижний бурт корпуса 4, губки 13 пружинами 14 сжаты, шток 6 зафиксирован на корпусе 4 шариками 30 16, корпус 4, в свою очередь, находится в нижнем положении, гайкой 12 опираясь на верхнюю поверхность основанияПри движении вниз упор 10 нижним торцом соприкасается с деталью 20, а исполнительный механизм...
Рука манипулятора

Номер патента: 1495125
Опубликовано: 23.07.1989
Авторы: Ким, Флеклер, Царевский
МПК: B25J 1/02, B25J 18/00
Метки: манипулятора, рука
...соосно друг н друге ) с.разнымнаправлением нанинки. Свободные концыпружин 2 и Ъ закреплены на фланце, 25 Ънапример стакане 4, к которому крепится схнат 5. Привод осевого перемещения содержит, например, двигатель 6вращения, на оси которого закрепленбарабан 7, на котором намотана гибкая тяга 8, соединенная через блок 9со стаканом 4 и размещенная по осируки манипулятора, т.е. спиральных пружин 2 и 3.Рука манипУлятора работает следующим образом,В исходном положении рука манипулятора находится н сложенном положении. Для выднижения руки манипулятора в осевом направлении включается 40двигатель 6, при этом гибкая тяга 8разматывается с барабана 7 и под действием упругих свойств спиральных(рулонных) пружин 2 и Э схнат 5 вмес - 3 5 4те со стаканом...
Устройство для обеспечения безопасности работы оператора

Номер патента: 1495126
Опубликовано: 23.07.1989
Авторы: Андрусенко, Байкалов, Доброванов, Сокирко, Череповский
МПК: B25J 19/06
Метки: безопасности, обеспечения, оператора, работы
...эластичных трубок 3 и далее через выходные 6 отверстия - на вход элемента 7 блоки ровки и элемента 8 сигнализации.Установившийся максимальггый уровень расхода потока воздуха при этом соответствует отсутствию сигнала элемента 7 блокировки и элемента 8 сигнализации. При воздействии оператора на пластины 2 настила 1 они прогибаются и своей ребристой поверхностью деформируют эластичные трубки 3, при этом ребра имеют поперечное направление относительно трубок 3, а расстояние между последними не превышает минимального размера следа стопы оператора. Площадь поперечного сечения эластичных трубок 3 уменьшается, вчастном случае, до нуля. Расход воз"духа от источника 5 сжатого воздухапрекращается, это приводит к регламентированному уменьшению...