Устройство для управления сборочным манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
149511новится равным сигналу с выхода задатчика 1 положения, привод 7 останавливаетсяЗатем начинается перемещение исполнительного органа 9 вдоль вертикальной оси Е. Сборка не осуществляется, так как оси базовой детали(втулки) и детали в схвате (нала)не совпадают вследствие неточности 1 Оперемещения по координате Х ввидуограниченной точности привода 7,погрешности расположения базовой детали (втулки), смещения детали (вала) н схнате и т,п, Поэтому деталь 15и схвате упирается в фаску базовойдетали, при этом возникает сила реакции связи и на выходе датчика 12 усилияпоявляется сигнал, при превышениикоторым величины зоны нечувствительности усилителя 13 (зона нечувствительности регулируется сигналомэадатчика 2 усилия) поступает сигнал через третий сумматор 5 на первый интегратор 14, На выходе интегратора 14 появляется сигнал коррекции скорости привода Величина этогосигнала пропорциональна интегралуот приращения сигнала об усилии ЬМ,поступающего с датчика 12 усилия, 30Укаэанный сигнал поступает на третий вход сумматора 4, поданая соответствующий сигнал на привод 7, вызывая его перемещение н направлении рассогласования осей деталей,Одновременно сигнал с выхода первого интегратора поступает на второй 40 интегратор 15, на выходе которого формиру тся сигнал коррекции вели" чины перемещения45который поступает на третий вход пер" ного сумматора 3. Этот сигнал способствует перемещению исполнительного органа 9 н направлении уменьшения рассогласования осей деталейКак только сигнал с датчика 12 усилия становится меньше величины зоны нечувствительности усилителя 13, сигнал на его выходе становится равным нугпп. Так как третий сумматор 5 и первый интегратор 14, охваченный отрицательной обратной свя" зью, образуют апериодическое звено,7 4то на ныходе первого интегратора 14также устанавливается нулевой сигнал, поэтому сигнал на третий входвторого сумматора 4 не подается ипривод 7 останавливается, При этомна выходе интегратора 15 сигналкоррекции, соответствующий новомуположению исполнительного органа 9,сохраняется,Устройство позволяет удерживатькорректирующий сигнал положения навыходе интегратора 15 при отсутствии сигнала (или меньше величинысигнала задания по усилию) с дат"чика 12 усилия в отличие от известного устройства, н котором сигналкоррекции положения пропадает приотсутствии сигнала с датчика 12 усилия, что вызывает рынки исполнительГного органа 9, Кроме того, интеграторы 14 и 15 устройства выполняютсглаживающие функции, повышая динамические характеристики устройства.В устройстве с выхода первого интегратора 14 дополнительно поступаетсигнал коррекции скорости непосредственно на привод 7 через второйсумматор 4, что существенно повышает быстродействие по сравнению с известным устройством, в котором сигналкоррекции один и поступает на входпервого сумматора 3, т.е. на входвсего устройства, что замедляет осуществление коррекции.формула изобретенияУстройство для управления сборочным манипулятором, содержащее задатчик усилия, привод, кинематически связанный с датчиком скорости и через исполнительный механизм - с датчиком положения и исполнительным органом, который кинематически связан с датчиком усилия, последовательно соединенные эадатчик положения, первый сумматор и усилитель, а также второй сумматор, переключенный первым входом к ныходу датчика скорости, причем вьгход датчика положения соединен с вторым входом первого сум" матора, о т д и ч а ю щ е е с я тем, что, с Келью улучшения динамических характеристик, оно содержит последовательно соединенные регулируемый усилитель, третий сумматор, первый интегратор и второй интегра" тор, ныход которого подключен к тре14951 Составитель Е. Политов Техред М. Дидык Корректор А.Обручар Редактор В. Петраш Заказ 4163/12 Тирах 778 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г.уагород, ул. Гагарина, 101 ть ему входу первого с умма тора, а вход -к второму входу третьего сумматора ивторого сумматора, соединенного третьимвходЬм с выходом усилителя, а выходом -17ес входом привода, а первый и второй входы регулируемого усилителя подключены соответственно к выходу эадатчика усилия и датчика усилия.
СмотретьЗаявка
4350184, 28.12.1987
ВЛАДИМИРСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ВИШНЯКОВ РУСТАМ СУЛЕЙМАНОВИЧ, ЕГОРОВ ИГОРЬ НИКОЛАЕВИЧ
МПК / Метки
МПК: B25J 13/00
Метки: манипулятором, сборочным
Опубликовано: 23.07.1989
Код ссылки
<a href="https://patents.su/3-1495117-ustrojjstvo-dlya-upravleniya-sborochnym-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления сборочным манипулятором</a>
Устройство для регулирования положения объекта

Номер патента: 741238
Опубликовано: 15.06.1980
Авторы: Аристов, Файнгольд, Цирулев
МПК: G05D 3/00
...элементов И-НЕ первой группы сигнал отсутствует. С задатчика положения объекта сигнал +5 В поступает на второй вход элемента И-НЕ 10,2 первой группы элементов И-НЕ, а на вторых входах остальных элементов И-НЕ этой группы сигнал отсутствует, так как они через резисторы соединены с обшей шиной устройства. В результате все элементы И-НЕ пеовой группы закрыты и на входе усилителя 5, подключенного входом к выходам элементов И-НЕ первой группы, появляется сигнал, который усиливается и поступает на исполнительный элемент 7, подключенный входом к выходу усилителя 5, Подвижный объект приходит в движение. Направление движения определяется состоянием элементов И-НЕ второй 40 группы 4 следующим образом.Так как задатчик 9 положения объекта...
Устройство для формирования корректирующего сигнала телевизионного датчика

Номер патента: 1125772
Опубликовано: 23.11.1984
Авторы: Бычков, Калинин, Кузнецов, Тимофеев
МПК: H04N 5/14
Метки: датчика, корректирующего, сигнала, телевизионного, формирования
...фазой 772 4и управления модулем соответственно,которые являются управляемыми входами предлагаемого устройства.Устройство работает следующим образом,Тактирующие импульсы, синхронные с разверткой ТВ датчика 11, поступают с первого выхода синхронизатора 3 на вход блока 4 адресации. Блок 4 адресации формирует синхронно изменяющийся с поступлением тактирующих импульсов адресный сигнал в виде двоичного кода, который подается на вход блока 5 памяти текущих значений составляющих корректирующего сигнала для управления считыванием информации с его ячеек. В ячейках блока 5 записаны в виде К-разрядного двоичного кода текущие отсчеты для каждой иэ М составляющих корректирующего сигнала в опорных точках, равномерно расположенных по площади ТВ...
Модулятор дискретного сигнала по временному положению
Номер патента: 1800641
Опубликовано: 07.03.1993
Автор: Турко
МПК: H04L 27/12
Метки: временному, дискретного, модулятор, положению, сигнала
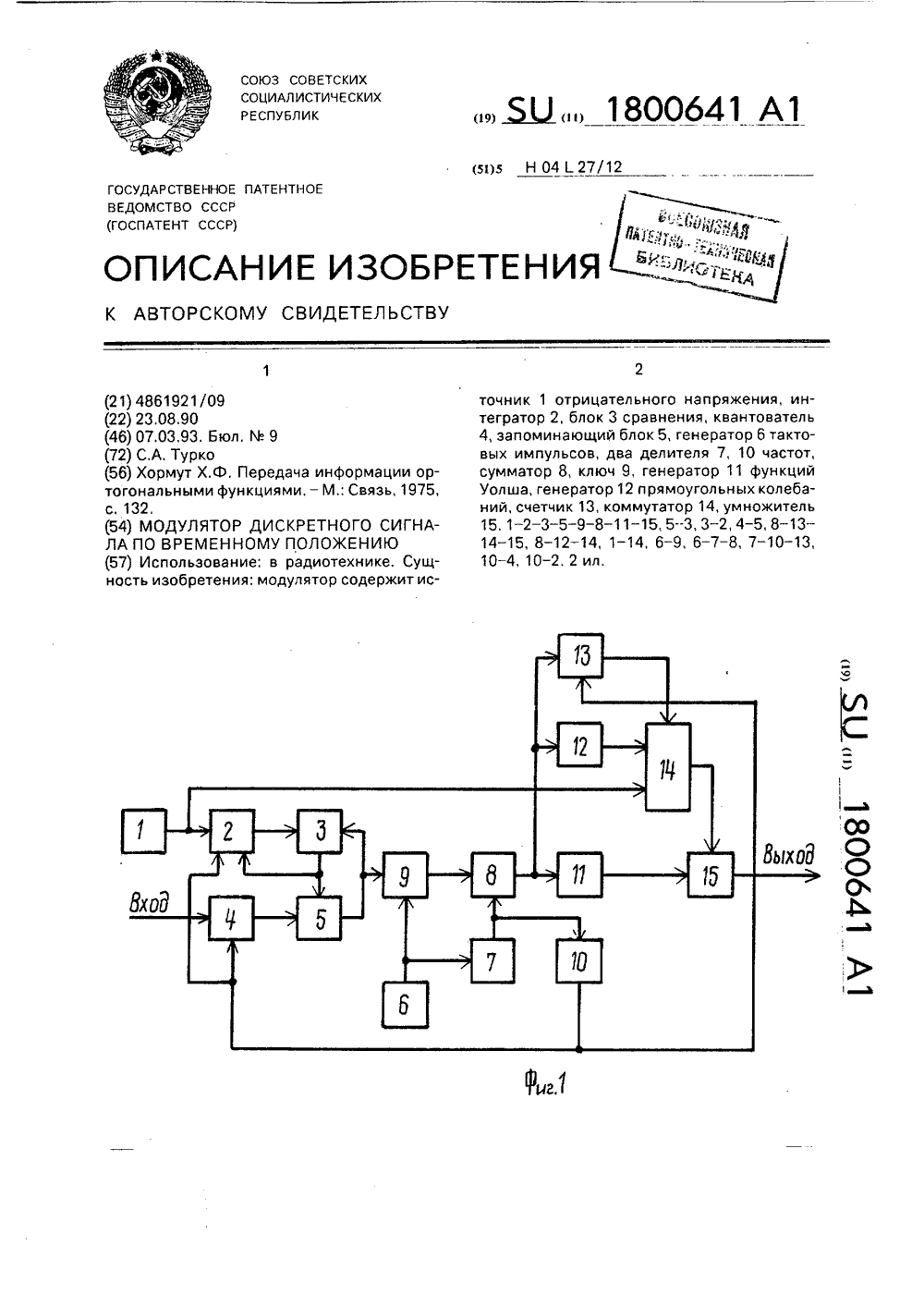
...Уолша. Если значение квантованного напряжения равно 2, то фазовый сдвиг осуществляется на два элемента функции Уолша и т, д. (фиг, 2, к).Делитель 10 частоты образует из последовательности импульсов с выхода делителя 7 частоты импульсы, которые запускают схему квантователя 4 в моменты времени О, О, 2 О(фиг. 2 к), Эти же импульсы поступают на второй вход начала интегрирования интегратора 2 и запускают его в работу, а также на второй вход установки счетчика 13 в нулевое состояние и сбрасывают его в нуль.Последовательность импульсов, поступающая на вход генератора 11 функций Уолша поступает также на входы генератора 12 прямоугольных колебаний и на вход счетчика 13. Таким образом, при поступлении первых 2"импульсов с выхода сумматора 8...
Устройство для коррекции показаний датчиков положения нажимных винтов прокатного стана

Номер патента: 480048
Опубликовано: 05.08.1975
Авторы: Зайцев, Кувшинов, Ляндрес, Сухов
МПК: G05B 1/01
Метки: винтов, датчиков, коррекции, нажимных, показаний, положения, прокатного, стана
...с запоминающего блока 7 берется таким, чтобы выходной код арифметического блока 8 был равен выходному коду датчика 1,Такой ввод коррекции в показания одного датчика положения, позволяет сохранить привязку нулей нажимных винтов.При включенном ключе 9 из формирователя 5 поступает команда Перепись, действующая во все время раздельной работы, От ее переднего фронта срабатывает формирователь 10, формирующий команду формирование разрешения на запись коррекции, от которой срабатывает триггер 11, выдающий команду Разрешение записи коррекции и разрешает прохождение ситнала от схемы ИЛИ 12 через схему И 13. По окончании раздельной работы команда Перезапись снимается, срабатывают формирователи 14 - 16, которые соответственно производят сброс,...
Устройство для формирования сигнала управления положением магнитной головки

Номер патента: 1247938
Опубликовано: 30.07.1986
Авторы: Меркурьев, Михайлов, Столяров, Юдаев
МПК: G11B 21/10
Метки: головки, магнитной, положением, сигнала, формирования
...датчик 5 положения магнитной головки, аналоговый инвертор 6 и элемент ИЛИ 7. Выход цифроаналогового преобразователяподключен к выходной шине 8,Устройство содержит также первый,второй, третий и четвертый ждущиемультивибраторы 9, 1 О, 11 и 12, выходы которых соединены через элементИЛИ 7 со счетным входом вычитающегосчетчика 1, первый и второй детекторы 13 и 14 уровня, подсоединенныевходами соответственно к первомуи второму выходам датчика 5 положения магнитной головки, и первый ивторой компараторы 15 и 16 напряжений. Первый выход датчика 5 положения магнитной головки подключен к первым входам первого и второго компараторов 15 и 16 напряжений, соединенных вьг;одами с входами соответственно первого и второго ждущихмультивибраторов 9 и 10,...
Предыдущий патент: Устройство для управления приводом робота
Следующий патент: Схват манипулятора
Случайный патент: Топка для сжигания твердого мелкого топлива или жидкого и газообразного