Стенд для испытания промышленных роботов-манипуляторов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1495114
Авторы: Бондаренко, Павлюк, Романюк, Скорина, Цырендоржиев
Текст
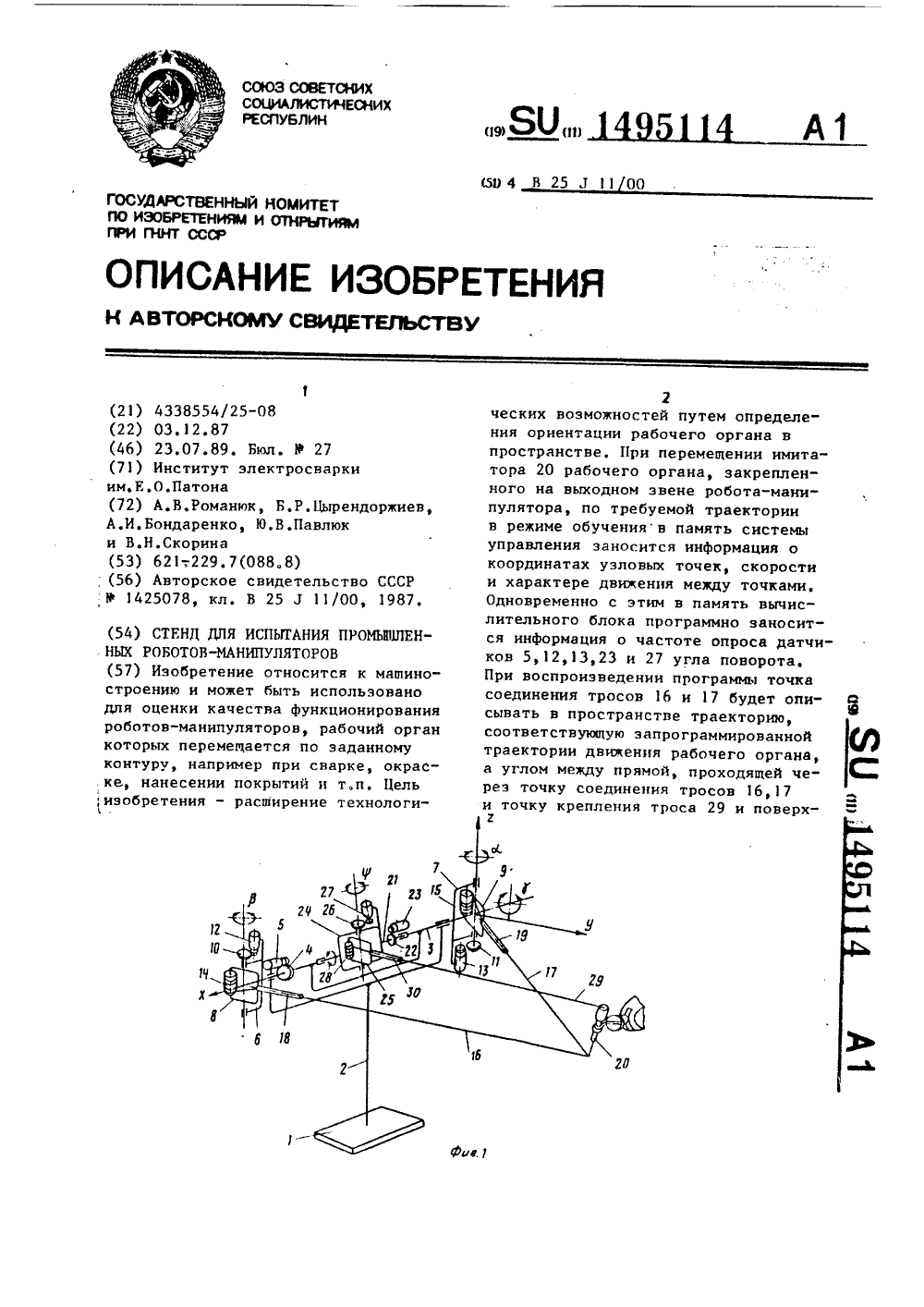
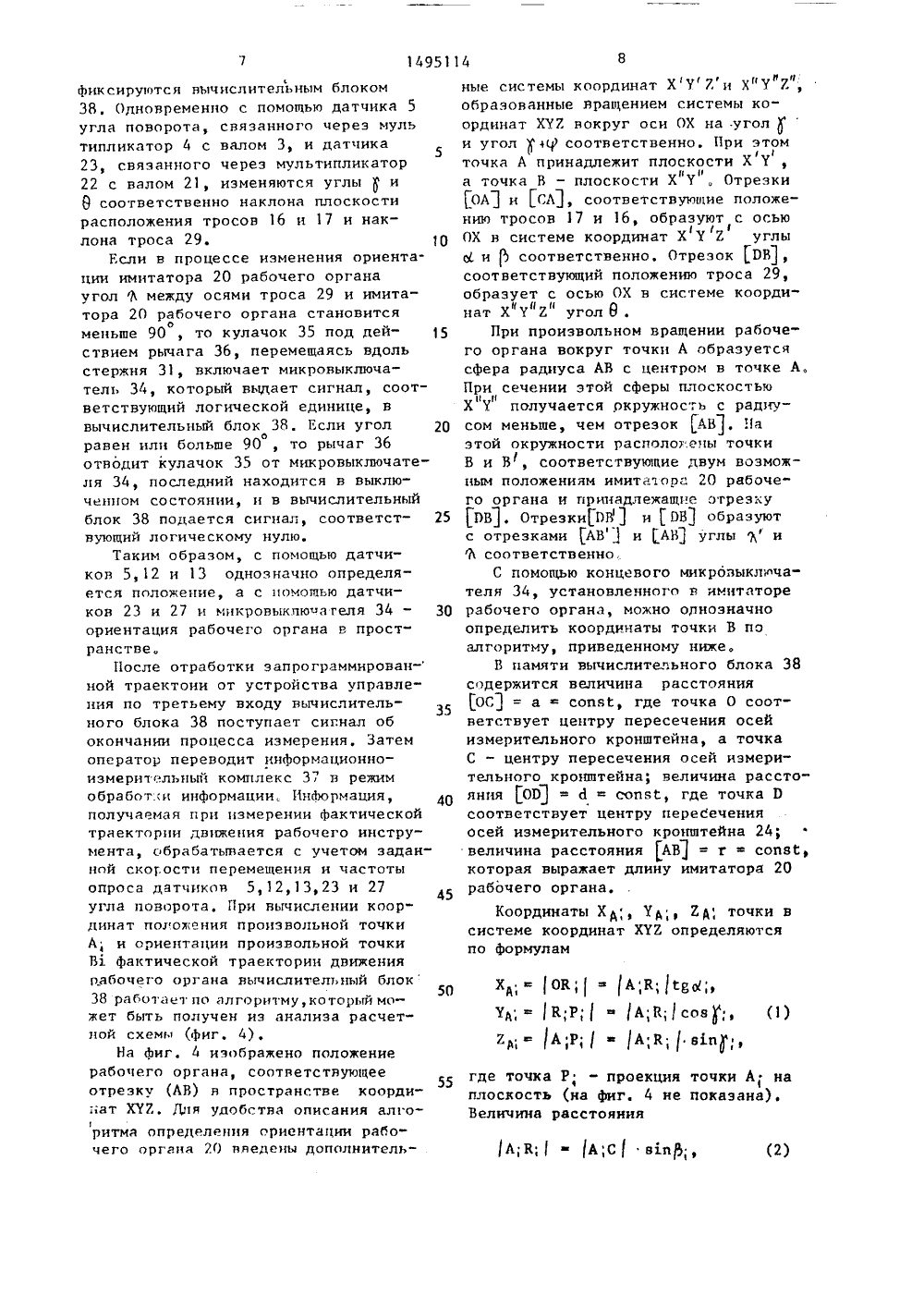
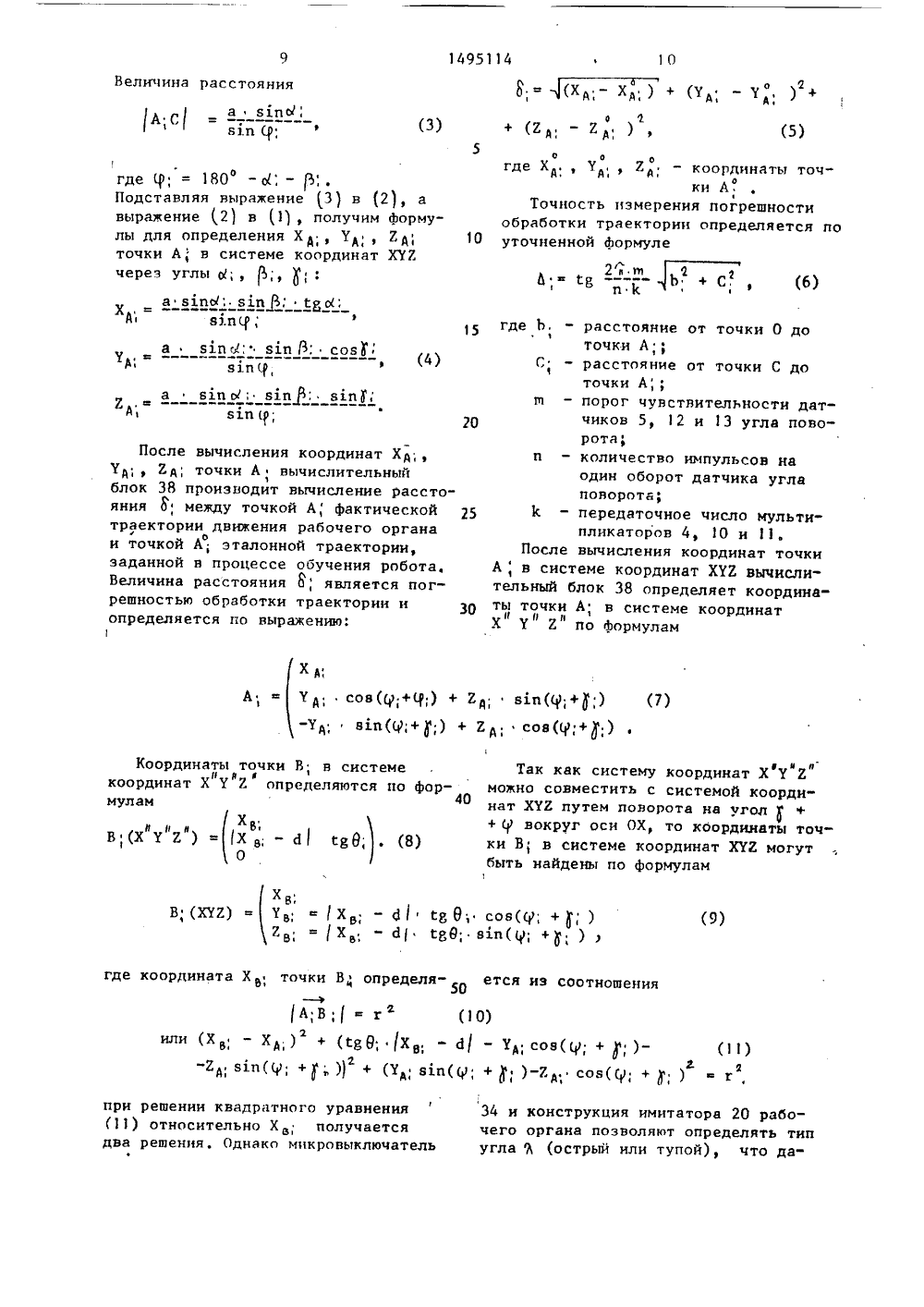
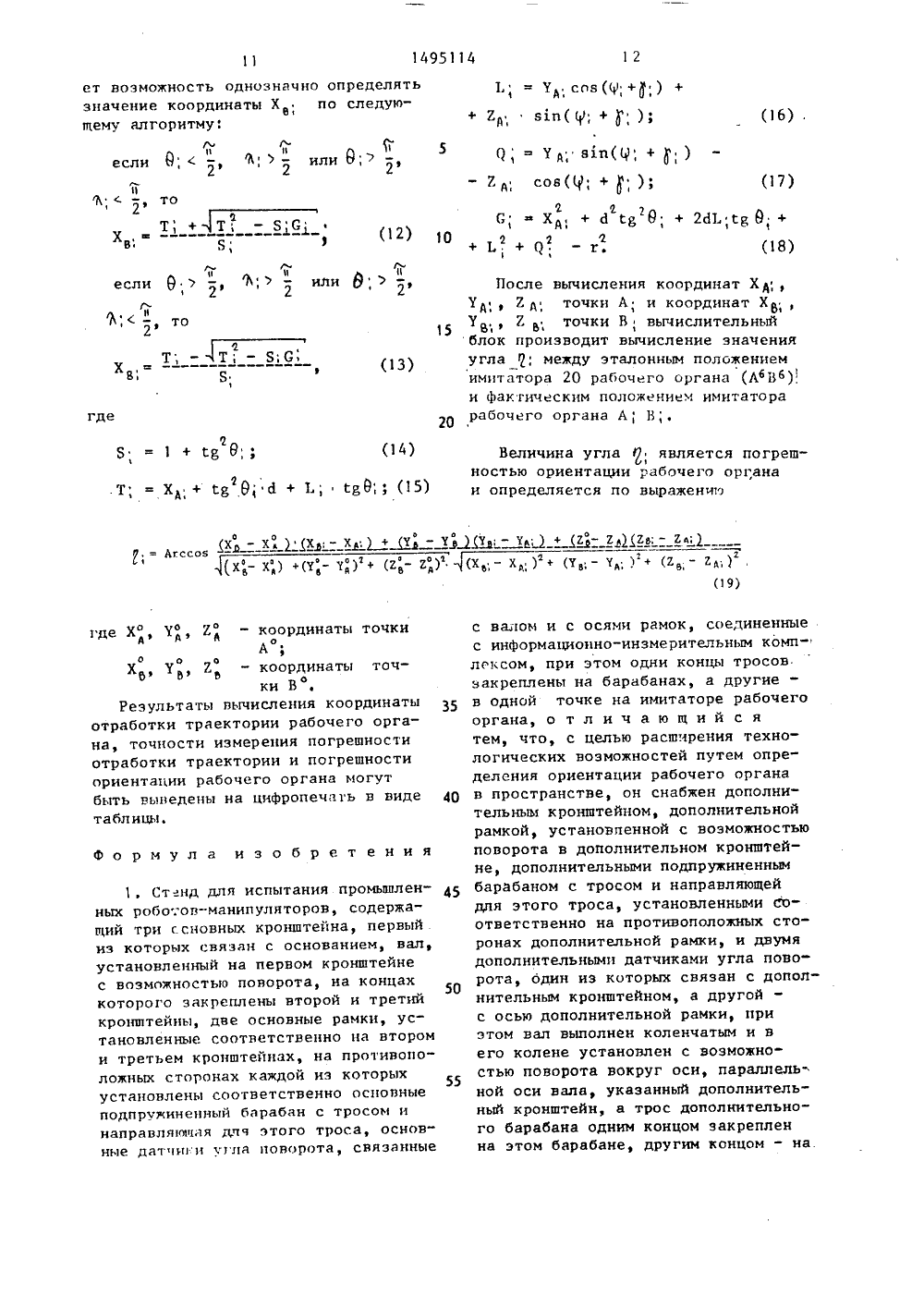
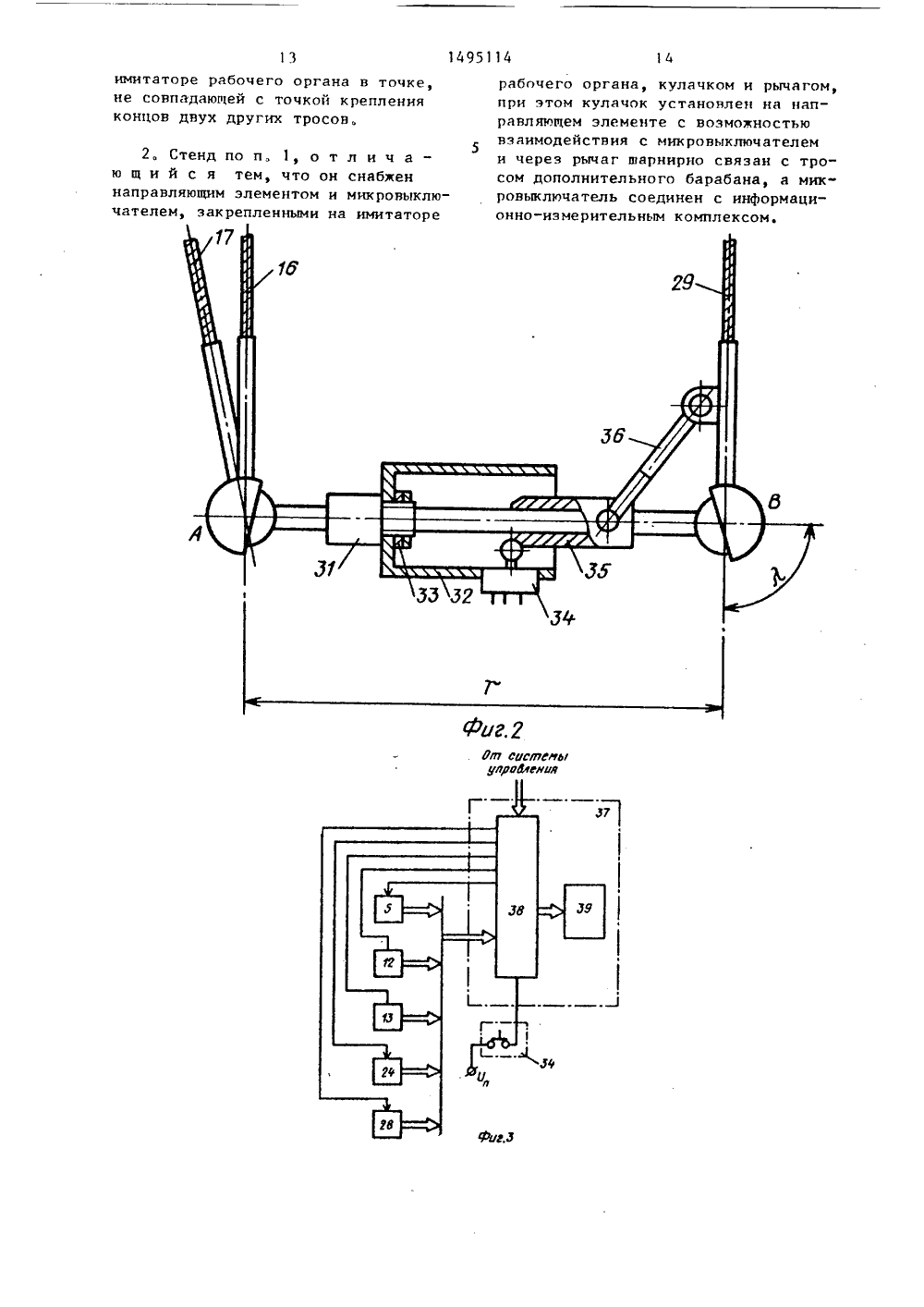
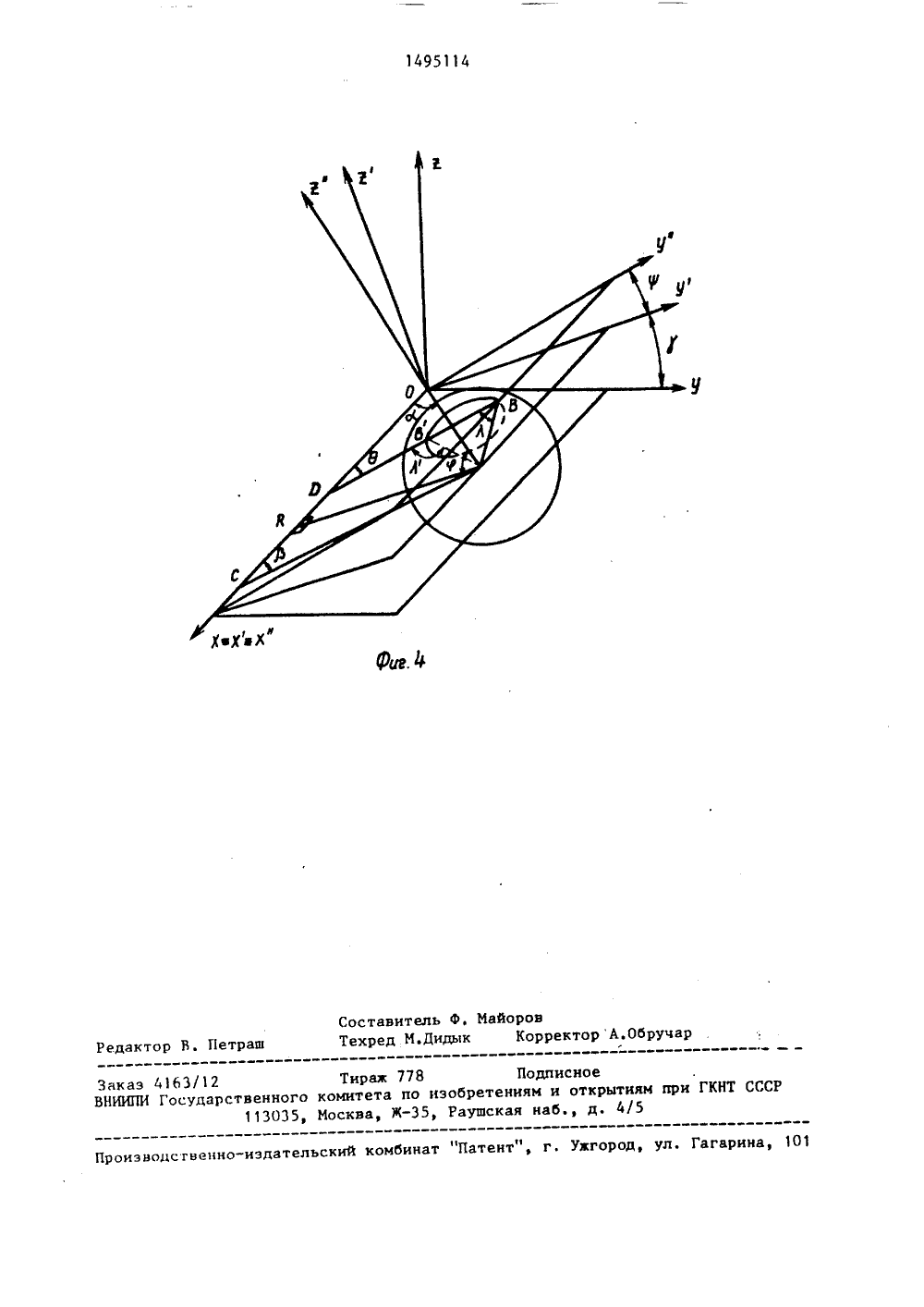
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 25 .1 11 БРЕТЕНИЯ ДЕТЕЛЬСТВУ рк тро.Р. Цыр ,Павлю доржиев,.8)детельство 5 1 11/00,СР87,(54) СТЕНД ДЛЯ ИСПЫТАНИЯ ПРОМЫВЛЕННЬЙ РОБОТОВ-МАНИПУЛЯТОРОВ(57) Изобретение относится к машиностроению и может быть использованодпя оценки качества функционированияроботов-манипуляторов, рабочий органкоторых перемещается по заданномуконтуру, например при сварке, окраСке, нанесении покрытий и т,п. Цель,изобретения - расширение технологихГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕ К АВТОРСКОМУ СВ;(56) Авторское сви У 1425078, кл. В 2 гческих возможностей путем определения ориентации рабочего органа в пространстве, При перемещении имита" тора 20 рабочего органа, закрепленного на выходном звене робота-манипулятора, по требуемой траектории в режиме обученияв память системы управления заносится информация о координатах узловых точек, скорости и характере движения между точками. Одновременно с этим в память вычислительного блока программно заносится информация о частоте опроса датчи ков 5,12,13,23 и 27 угла поворота. При воспроизведении программы точка соединения тросов 16 и 17 будет описывать в пространстве траекторию, соответствующую запрограммированной траектории движения рабочего органа, а углом между прямой, проходящей через точку соединения тросов 16,7 и точку крепления троса 29 и повер3 14951 ностью соединения - ориентацию рабочего органа относительно запрограммированной траектории. Рамки 8 и 9 и вал 3 будут поворачиваться вслед 141за перемещением нижней части имитатора 20, а рамка 25 и вал 21 - вслед эа перемещением верхней части рабочего органа, 1 з,п. ф-лы, 4 ил, Изобретение относится к машиностроению и может быть использовано для оценки качества функционирования роботов-манипуляторов, рабочий орган которых перемещается по заданному контуру, например при сварке, окраске, нанесении покрытий и т.п.Целью изобретения является расширение технологических возможностей путем определения ориентации рабочего органа в пространстве.На фиг. 1 приведен стенд, общий вид; на фиг, 2 - имитатор рабочего органа; на фиг. 3 - блок-схема информационно-измерительного комплекса стенда; на фиг, 4 - расчетная схема для определения координат точек А и В.Стенд для испытания промышленных роботов-манипуляторов содержит уста" новленный на основании 1 первый кронштейн 2, на котором с возможностью поворота установлен коленчатый вал 3, связанный через мультипликатор 4 с датчиком 5 угла поворота. На концах вала 3 жестко закреплены второй 6 и третий 7 кронштейны. В кронштейнах 6 и 7 с воэможностью поворота расположены соответственно рамки 8 и 9, которые через мультипликаторы 10 и 11 соединены с датчиками 12 и 13 угла поворота. На противоположных сторонах рамок 8 и 9 установлены барабан л 14 и 15 для намотки тросов 16 и 17 и направляющие 18 и 19 для этих тросов. Тросы 16 и 11 одним концом закреплены на вращающихся барабанах 14 и 15, а другими связаны между собой и шарнирно закреплены в нижней части имитатора 20 рабочего органа робота-манипулятора.В колене вала 3 установлен второй вал 21, связанный через мультипликатор 2 с датчиком 23 угла поворота. На валу 21 жестко закреплен четвертый дополнительный кронштейн 24, в котором е возможностью поворота расположена дополнительная рамка 25, Рамка 25 через мультипликатор 2635, ва 39, Выходы датчиков 5,12,13,23и 27 угла поворота соединены с пер"вым входом вычислительного блока 38,второй вход которого связан с микро 40выключателем 34 имитатора 20 рабочего органа, а третий - с выходомустройства управления испытуемогоробота-манипулятора. Вторые выходывычислительного блока 38 связаны суправляющими входами датчиков 5,45 12,13,23 и 21 угла поворота,50 55 15 20 25 30 соединена с датчиком 27 угла поворота. На противоположных сторонах рамки 25 установлены дополнительные подпружиненный барабан 28 для намотки троса 29 и направляющая 30 для этого троса. Трос 29 одним концом закреплен на вращающемся барабане 28, а другим шарнирно закреплен в верхней части. имитатора 20 робота- манипулятора.Имитатор 20 рабочего органа выполнен в виде направляющего элемента (стержня) 31, на котором закреплен корпус 32 с помощью гайки 33, Внутри корпуса установлен микровыключатель 34, На стержне 31 с возможностью перемещения вдоль и вокруг оси стержня 31 установлен кулачок 35, который связан через рычаг 36 с тросом 29. При движении кулачок взаимодействует с микровыключателем 34.Информационно-измерительный комплекс 37 состоит иэ последовательно соединенных вычислительного блока 38 и цифропечатающего устройстСтенд работает следующим образом,Оператор с помощью пульта управления выводит имитатор 20 рабочего органа, закрепленный на выходном звене робота-манипулятора, в начальную точку требуемой (эталонной) траектории его движения, в качестве которой могут быть использованы, например, прямые линии, ломаные, синусоидальные и др. кривые, окружности. После этого на третий вход вычислительного блока 38 от устройства управления роботом поступает сиг 1495114нал, который приводит в исходноесостояние вычислительный блок 38.Последний включает цифропечатающееустройство 39, Этим достигается синхронизация момента начала измеренияположения и ориентации рабочего органа с началом его движения, Приэтом с вторых выходом блока 38 навходы датчиков 5,12,13,23 и 27 поступают сигналы опроса датчиков угла поворота, в результате чего ихпоказания фиксируются в памяти вычислительного блока 38. Положениеи ориентация рабочего органа роботатакже фиксируются в памяти устройства управления,Затем в режиме обучения осуществляется программирование перемещения рабочего инструмента робота методом от точки к точке, для чегооператор последовательно выводит рабочий орган в характерные узловыеточки эталонной линии. При этом впамять системы управления роботомзаносятся координаты узловых точекэталонной линии, скорость перемещения рабочего органа между точками,характер движения между точками(линейная или круговая интерполяция).Информация о координатах уэовых точек эталонной линии, скорости и характере движения между точками заносится также в память вычислительного блока 38, Одновременно с этимв память вычислительного блока 38программно заносится информация очастоте опроса датчиков 5,12,13,23и 27 угла поворота, которая при проведении конкретного испытания всегда постоянна и выбирается исходя измаксимальной скорости движения рабочего органа,После окончания режима обучения,т.е. после того, как в вычислительный блок 38 поступили координаты последней узловой точки, вычислительныйблок 38 формирует массив значенийкоординат всех, точек эталонной кривой, Массив формируется так, чтобывремя движения между двумя соседнимиточками эталонной кривой было равновеличине, обратной частоте опросадатчиков 5,12,13,23 и 27.Затем осуществляется воспроизведение записанной программы перемещения рабочего органа, В момент включе.ния режима воспроизведения программыустройство управения роботом выдает51 О15 сигнал на один из третьих входоввычислительного блока 38. При наличии такого сигнала вычислительныйблок 38 начинает осуществлять измерение координат фактического положения и ориентации рабочего инструмента робота, чем достигается синхронизация моментов измерения и прохождения рабочим инструментом эталонных значений координат точек линиисоединения. Измерение фактическогоположения и ориентации рабочего инструмента осуществляется путем выдачи с вычислительного блока 38 повторому выходу опросных сигналов,которые поступают на входы датчиков5,12,13,23 и 27 угла поворота,При воспроизведении программы 20 точка соединения тросов 16 и 17 описывает в пространстве траекторию, соответствующую запрограммированнойтраектории движения рабочего органа,а угол между прямой, проходящей 25 через точку соединения тросов 16 и17 и точку крепления троса 29 с верхней частью имитатора рабочего органа, и поверхностью соединенияориентацию рабочего органа относи тельно запрограммированной траектории, При этом рамки 8 и 9 и вал 3поворачиваются вслед за перемещениемнижней части рабочего органа (изменение положения), а рамка 25 и вал21 - вслед за перемещением верхнейчасти рабочего органа (иэменениеориентации) относительно запрограммированной траектории, Подпружиненные барабаны 14 и 15, соединенные с 40 тросами 16 и 17, и барабан 28, соединенный с тросом 29, вращаются соответствующим образом, обеспечиваяразмотку или намотку тросов 16, 17и 29.45 Поворот рамок 8,9 и 25 осуществляется так, чтобы обеспечиваласьсоосность тросов 16,17 и 29 и направляющих 18,19 и 30, На входе и выходе направляющих 18,19 и 30 уста,новлены рамки для улучшения условийпрохождения тросов по направляющим,обеспечения их соосности и исключения влияния изгибов тросов на показания датчиков 12,13 и 27. Одновременно с поворотом рамок 8,9 и 25через мультипликаторы 10, 11 и 26вращаются датчики 12,13 и 27, показания которых, соответствующие угламЫиповорота тросов 16,17 и 29, 149511435 фиксируются вычислительным блоком38, Одновременно с помощью датчика 5угла поворота, связанного через мультипликатор 4 с валом 3, и датчика23, связанного через мультипликатор22 с валом 21, изменяются углыи9 соответственно наклона плоскостирасположения тросов 16 и 17 и наклона троса 29, 10Если в процессе изменения ориентации имитатора 20 рабочего органаугол Ф между осями троса 29 и имитатора 20 рабочего органа становитсяоменьше 90, то кулачок 35 под действием рычага 36, перемещаясь вдольстержня 31, включает микровыключатель 34, который выдает сигнал, соответствующий логической единице, ввычислительный блок 38. Если угол 20оравен илн больше 90, то рычаг 36отводит кулачок 35 от микровыключателя 34, последний находится в выключенном состоянии, и в вычислительныйблок 38 подается сигнал, соответствующий логическому нулю,Таким образом, с помощью датчиков 5, 12 и 1 3 однозначно определяется положение, а с ггомошью датчиков 23 и 27 и мггкровыклюагеля 34 - 30ориентация рабочего органа в пространстве.После отработки запрограммирован-ной траектоии от устройства управления по третьему входу вычислительного блока 38 поступает сигнал обокончании процесса измерения, Затемоператор переводит информационноизмерительный комплекс 37 н режимобработ.ги информации, Информация,получаемая при измерении фактическойтраектории движения рабочего инструмента, обрабатывается с учетом заданной скорости перемещения и частотыопроса датчиков 5,12,13,23 и 27угла поворота, При вычислении координат пог ожения произвольной точкиА, и ориентации произвольной точкиВ 1 фактической траектории движениярабочего органа вычислителгный блок5038 работает по алгорггтму,которьгй может быть получен иэ анализа расчетпой схемгг гфиг. 4),На фиг. 4 изображено положениерабочего органа, соответствующееотрезку (АВ) в пространстве коорди 55лат ХУ 7 Дня удобства описания алгоритма определения ориентации рабочего органа 20 яяедены дополнитель Координаты ХА УА ЕА, точки всистеме координат ХУ 2 определяютсяпо формулам Х/ОК,(А,К; /18 О 1 Уг, (К;Р;/(А;К;(совг 2, (А;Р; ( щ /А;К; / ваап где точка Р; - проекция точки А; наплоскость (на фиг. 4 не показана).Величина расстояния(А К ( ы /А С/ взп 3;,(2) ные системы координат ХУ 7. и ХЯУ 7.,образованные вращением системы координат ХУ 7, вокруг оси ОХ на .уголи угол 1/ соответственно, При этомгточка А принадлежит плоскости Х Угг яа точка В - плоскости Х У , Отрезки,ОА 1 и СА 1, соответствующие положению тросов 17 и 16, образуют с осьюгОХ в системе координат Х У 2 углыМ.и Р соответственно. Отрезок РВ,соответствующий положению троса 29,образует с осью ОХ в системе координат Х У 2 угол 6 .При произвольном вращении рабочего органа вокруг точки А образуетсясфера радиуса АВ с центром в точке А.При сечении этой сферы плоскостьюи г(Х У получается окружность с радиусом меньше, чем отрезок 1 АВ, 1 аэтой окружности располог,еггы точкиВ и В, соответствующие двум возможным положениям имитагора 20 рабоче"го органа и принадлежащгге отрезку1 ПВ 1, ОтрезкииВ 1 и 1 ОВ 1 образуютс отрезками АВи АБ 1 углыи% соответственно,С помощью концевого микровыключателя 34, установленного в имитаторерабочего органа, можно опноэначноопределить координаты точки В поалгоритму, приведенному ниже,В памяти вычислительного блока 38содержится величина расстояния1 ОС 1 = асопя, где точка О соответствует центру пересечения осейизмерительного кронштейна, а точкаС - центру пересечения осей измерительного кронштейна; величина расстояния 00= Йсопв, где точка Рсоответствует центру пересеченияосей измерительного кронштейна 24;величина расстояния АВ( = г = сопят,которая выражает длину имитатора 20рабочего органа,1495114 о )2Аю Величина расстояния впоо Ф +(Ед,-Ед )о о о ГДЕ Хд 1 Уд, Ф д(5 координат чо киТочность измеренияобработки траектории о 0 уточненной формуле)в (2), а лучим формуУд, Ед, динат ХУ 7. Подс огрешност ределяетс ыраж 2 н. в-" - .-п 1 с ер 8).п ;ЯПМ; вю О Ь. асстояниеочки А,;асстояние т точки О до у Г от точки С точк п Ы: ядп: вдп,по вствительности дат и 13 угла повочиков рота,20 После вычисления координУд;, Ед, точки А вычислител1блок 38 производит вычисленяния о между точкой А, фактраектории движения рабочегои точкой А; эталонной траекзаданной в процессе обученияВеличина расстояния 8, являрешностыо обработки траекторопределяется по выраженщо: т Хд;,ьныйе расстоической 25органаории,пово пере та очн ров ния е числ4, 1 О т 11,ат точли После вычисл , в системе к ельный блок 3 ы точки А, в коорд ат ХУ А рди опр ВЫЧИСЛИкоординаинат тся пог деляет истеме ко аКоороординулам ХУЕ наты точк ов системеделяются по фор 40 рди тем ой коорди на угол+ оординаты т ат ХУг могу, (ХУЕ ината Хв точки В определя" 550 я из соотношени В 1 (ВО 1 Хя,+ при решении квадра(11) относительнодва решения, Однак 34 и конструкция имитатора 20 рабочего органа позволяют определять ти ь угла Ъ (острый или тупой), что данения получаетсмикровыклвча= 18 О -, - Р;. ляя выражение 3 ие (,2 в (1, по определения ХАв системе коор глы о(;,впс; ядп Я. Сдо оличество импульсов на дин оборот датчика угл Так как систему ко ожно совместить с си ат ХУЕ путем поворот Ч вокруг оси ОХ, то и В; в системе ко д ть найдены по фо л1495114 12 ет воэможность однозначно определятьзначение координаты Х по следую"вщему алгоритму: 1,; = Уд сов +1 ) +12) 1если ) ) - Ъ,2Ъ- тои)2 Яюхыйения ием бВб д(г 1 риентации рабочего еляется по выражению(19) д) + (гв гд доединенные ьным компкоординаты точ с валом и с осями рамок,с информационно-инзмерителлаксом, при этом одни конзакреплены на барабанах,в одной точке на имитатооргана, о т л и ч а ю щ итем, что, с целью расширелогических воэможностей п Акоордики Вслепня о а оХва в в ы тросовдругие -е рабочегой с я аты точ координатычего оргагрешностигрешности ль и рания отработки траек ия техн на, точности иэм отработки траект ориентации рабоч быть выл еде ны н а таблицы,преиип деления ориентации рабочего органав пространстве, он снабжен дополнительныы кронштейном, дополнительнойрамкой, установленной с возможностьюповорота в дополнительном кронштейне, дополнительными подпружиненнымбарабаном с тросом и направляющейдля этого троса, установленными соответственно на противоположных сторонах дополнительной рамки, и двумядополнительными датчиками угла поворота, один из которых связан с дополнительным кронштейном, а другойс осью дополнительной рамки, приэтом вал выполнен коленчатым и в о органа могут ифропечать в в Формула ет ения пытания промышлен ляторов, содержаронштейна, первый снованием, вал нштейн конца ерво ворота, и ны второй сновные р третини, ус а второмротивопоетственн йнах, на аждой иэ лен с воэмож его колене уста стью поворота в ной оси вала, у ный кронштейн, го барабана одн на этом барабан кронште ронах к треть ожных ел круг оси,аэанный до торыхсновные нитель тельно етственно рабан с т становлены соотв Одпружинеиный ба аправляюшая длч трос допол КОИЦОМ Э другим к осом плен ат н угл н 1. Ст.д для иных робо; ов-манипщий три основныхиз которых связанустановленный нас воэможностью покоторого закреплекронштейны, две отановленные соотв этого троса, основоворота, связанные После вычисл2 , точк7 в, точкблок производиугла ; междуимитатора 20 ри фак гическимрабочего орган ения координат А; и координат В, вычислитель вычисление эна талонным положе бочего органа ( оложением имита А, В,.1495114 иг.3Рщ сусекиуюройююим имитаторе рабочего органа в точке,не совпадающей с точкой крепленияконцов двух других тросов. 52, Стенд по п. 1, о т л и ч а - ю щ и й с я тем, что он снабжен направляющим элементом и микровыключателем, закрепленными на имитаторе рабочего органа, кулачком и рычагом,при этом кулачок установлен на направляющем элементе с возможностьювзаимодействия с микровыключателеми через рычаг шарнирно связан с тросом дополнительного барабана, а мик"ровыключатель соединен с информационно-измерительным комплексом.1495114 Составитель Ф. МайоровРедактор В. Петраш Техред М.Дидык КорректорА.Обручар гвенно-издательский комбинат "Патент", г, Узтород, ул. Гагарина, 101 Произ аказ 4163/12 Тирек 778 Подписное НИИПИ Государственного комитета по изобретениям и откр113035, Москва, Ж, Раушская наб., д. иям при ГКНТ СССР
СмотретьЗаявка
4338554, 03.12.1987
ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
РОМАНЮК АЛЕКСЕЙ ВЛАДИМИРОВИЧ, ЦЫРЕНДОРЖИЕВ БАТА РОБДАНОВИЧ, БОНДАРЕНКО АЛЕКСАНДР ИГНАТЬЕВИЧ, ПАВЛЮК ЮРИЙ ВАСИЛЬЕВИЧ, СКОРИНА ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: испытания, промышленных, роботов-манипуляторов, стенд
Опубликовано: 23.07.1989
Код ссылки
<a href="https://patents.su/8-1495114-stend-dlya-ispytaniya-promyshlennykh-robotov-manipulyatorov.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытания промышленных роботов-манипуляторов</a>
Механизм задания длины хода рабочего органа станка

Номер патента: 651935
Опубликовано: 15.03.1979
Авторы: Додин, Казанцев, Маранцман, Рашкович, Тростановский, Шестопалов, Шкловский
МПК: B23Q 5/22
Метки: длины, задания, механизм, органа, рабочего, станка, хода
...8 и 9 относительно роторов 6 и 7 сельсинов 1 и 2, Рабочий орган станка, например стоп (на фиг. не показан) устанавливают в крайнее левое положение; левый диск 8 прижимают к упору 12 и вращают ротор 6 левогосельсина - оадатчика 1 в сторону уменьпения длины хода до его согласования с сельсином - датчиком (на фиг, не показан). Затем фиксируют это положение ротора 6 относительно диска 8 стопорным винтом 10.Аналогичную наладку производят в крайнем правом положении рабочего органа. Оля обеспечения запаса на перебег рабочего органа на повышенных скоростях ограничивают длину хода рабочего органа. Ипя этого переворачивают упоры 12 и 13, ограничивающие угол поворота дисков 8 и 9 из положения наладки в положение работы.На этом наладка...
Следящий гидропривод рабочего органа землеройной машины

Номер патента: 1084391
Опубликовано: 07.04.1984
Авторы: Амельченко, Слободин, Филиппов
МПК: E02F 9/22
Метки: гидропривод, землеройной, органа, рабочего, следящий
...положения, имеющий пояски 16 - 19 и окна. Окно 20 подключено к поршневой полости гидроцилиндра 21, окно 22 - к штоковой полости гидроцилиидра 21, окко 23 соединено с масляным баком 24 и окно 25 подключено к насосу 26.На следящем распределителе 7 смонтирован также, переливной клапан 27, соединенный с предохранительным клапаном 28, насосом 26 и масляным баком 24Для того, чтобы при отсутствий управляющего воздействия со стороны человека - оператора система находилась в равновесии, сила тяги уравновешивающей пружины 14 должна компенсировать усилие пружины 9 в нейтральном положении золотника б при любом положении ручки 1 управления.Для этого внешняя поверхность сектора 10 имеет переменный радиусГК=108433где Г - сила тяги пружины...
Устройство для слежения за высотным положением рабочего органа землеройной машины

Номер патента: 1209782
Опубликовано: 07.02.1986
Авторы: Егоров, Козлов, Файнзильбер, Шейнкер
МПК: E02F 9/20
Метки: высотным, землеройной, органа, положением, рабочего, слежения
...кромке рабочего органа, Положение датчика 1 относительно рабочего органа 2 задано радиусом К и углом 8 для среднего положения рабочего органа, Угол поворота рабочегооргана относительно среднего положения обозначен через Ч , В среднем положении рабочего органа уголмежду коленом щупа 5 и копирнымтросом 7 равен 3, . Радиус коленащупа 5 обозначен через К В среднем положении рабочего органа, т,е,при=- О, контактный элемент 6щупа 5 и днообразующая кромка рабочего органа находятся в одной поперечной вертикальной плоскости, вкоторой также лежит ось ординат ОУ,Устройство работает следующимобразом,При повороте рабочего органа 2на угол Ч относительно центра вточке О изменение вертикальногоположения датчика 1 составляет величину д У, которая...
Устройство для индикации перемещения рабочего органа станка

Номер патента: 716713
Опубликовано: 25.02.1980
МПК: B23B 25/06
Метки: индикации, органа, перемещения, рабочего, станка
...позволяет повысить технологИчность изготовления паза, а сле довательно, и устройства в целом. (Пазконусное отверстие - может быть выполнен, например, с помощью обычного сверла).На фиг. 1 изображено устройство, осм вой разрез; на фиг. 2 - сечение А-А на фиг. 1.3716На выходном валу 1 датчика 2 лийей- ных перемещений установлена полумуфта 3,. ступица которой подторможена тормоз ной колодкой 4. Полумуфта 3 соединенас помощью гибкого кольца 5, предназна-.ченного для компенсации неточностей изготовления, с установленной подвй"нахвостовике винта 6 полумуфтой 7 в ступицу которой радиально ввинчен поводок" 8, закрепляемый контргайкой 9, Коничес кий конец поводка 8 контактирует с поверхностью глухого конусного отверстия 10, выполненного на...
Устройство одновременного управления высотным и поперечно угловым положениями рабочего органа землеройной машины

Номер патента: 734353
Опубликовано: 15.05.1980
Авторы: Ерошенков, Иноземцев, Карев, Козлов, Корелин, Кудиш, Кузин, Файнзильбер, Шейнкер
МПК: E02F 5/10
Метки: высотным, землеройной, одновременного, органа, положениями, поперечно, рабочего, угловым
...3.Одно из плеч коромысла образует взаимодействующий с копирной проволокой 4 щуп 5 и несет датчик 6 высотного положения рабочего органа. Другое плечо коромысла несет маятниковый датчик 7 углового относительного горизонта положения этого коромысла, при этом маятник датчика 7 связан с рамой 1 посредством закрепленных на них соответственно дополнительного щупа 8 и упора 9, установленных с возможностью постоянного контакта. Коромысло снабжено фиксирующим его относительно рамы 1 силовым цилиндром 10, функционально связанным с датчиком 7 углового положения коромысла. Соотношение плеч 1. и 1 коромысла, несущих датчики 6 и 7,пропорционально отношению удалений (Н и Ь) нижней кромки и упора 9 рамы 1 от несущего коромысло 3 шарнира...
Предыдущий патент: Манипулятор
Следующий патент: Транспортный робот
Случайный патент: Способ и приспособление для улавливания пыли при работе шлифовальных кругов