Патенты с меткой «роботов-манипуляторов»
Стенд для испытания роботов-манипуляторов

Номер патента: 1171308
Опубликовано: 07.08.1985
Авторы: Ефимов, Натбиладзе, Хоперия
МПК: B25J 11/00
Метки: испытания, роботов-манипуляторов, стенд
...положения схвата, котороеустановлено на основании.1 и выполне 15но в виде трех барабанов 2, установленных на ходовых винтах 3 с образо"ванием винтовых пар, снабженных датчиками 4 угла поворота и связанныхс винтом через пружину (не показано), 20На наружной поверхности барабанов2 выполнена винтовая канавка, шагкоторой равен шагу ходового винта,в которой расположены тросы 5, одниконцы которых связаны между собой, 2а другой конец каждого троса 5 закреплен на барабане 2, Тросы установлены в направляющих б.Выходы датчиков 4 соединены синформационным устройством 7, состоя ущим из индикаторов 8 соединенныхс выходами соответствующих датчиков4, вычислительного блока 9, подключенного к выходам индикаторов, ицифропечатающего блока 10,...
Стенд для испытания промышленных роботов-манипуляторов

Номер патента: 1425078
Опубликовано: 23.09.1988
Авторы: Бондаренко, Романюк, Скорина, Тимченко, Цырендоржиев
МПК: B25J 11/00
Метки: испытания, промышленных, роботов-манипуляторов, стенд
...13,Затем осуществляется воспроизведение записанной программы перемещения рабочего инструмента. В момент включения режима воспроизведения программы устройство управления роботом выдает сигнал на один из вторьх входов вычислительного блока 24, При налинии такого сигнала вычислительный блок 24 начинает осуществлять измерение координат Фактического положения рабочего инструмента 20 робота, чем достигается синхронизация моментов измерения и прохождения инструментом 20 эталонных значений координат точек линии соединения. Измерение Фактичес кого положения рабочего инструмента 20 осуществляется путем выдачи с вычислительного блока 24 по второму выходу опросных сигналов, которые поступают на входы датчиков 5, 2 и 13 25 угла поворота. 1При...
Стенд для испытания промышленных роботов-манипуляторов
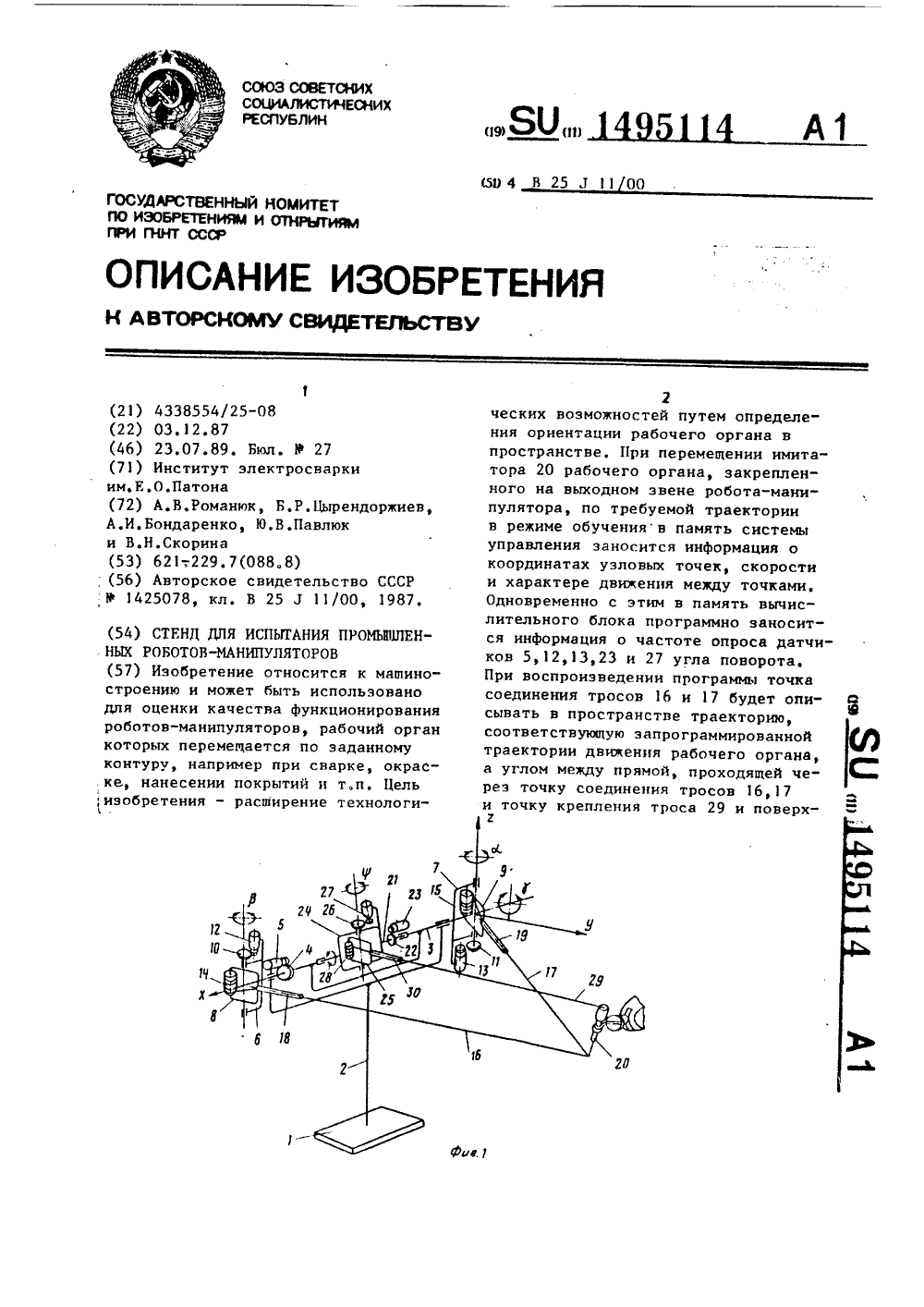
Номер патента: 1495114
Опубликовано: 23.07.1989
Авторы: Бондаренко, Павлюк, Романюк, Скорина, Цырендоржиев
МПК: B25J 11/00
Метки: испытания, промышленных, роботов-манипуляторов, стенд
...относительно запрограммированной траектории, Подпружиненные барабаны 14 и 15, соединенные с 40 тросами 16 и 17, и барабан 28, соединенный с тросом 29, вращаются соответствующим образом, обеспечиваяразмотку или намотку тросов 16, 17и 29.45 Поворот рамок 8,9 и 25 осуществляется так, чтобы обеспечиваласьсоосность тросов 16,17 и 29 и направляющих 18,19 и 30, На входе и выходе направляющих 18,19 и 30 уста,новлены рамки для улучшения условийпрохождения тросов по направляющим,обеспечения их соосности и исключения влияния изгибов тросов на показания датчиков 12,13 и 27. Одновременно с поворотом рамок 8,9 и 25через мультипликаторы 10, 11 и 26вращаются датчики 12,13 и 27, показания которых, соответствующие угламЫиповорота тросов 16,17...