Тактильный сенсор робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
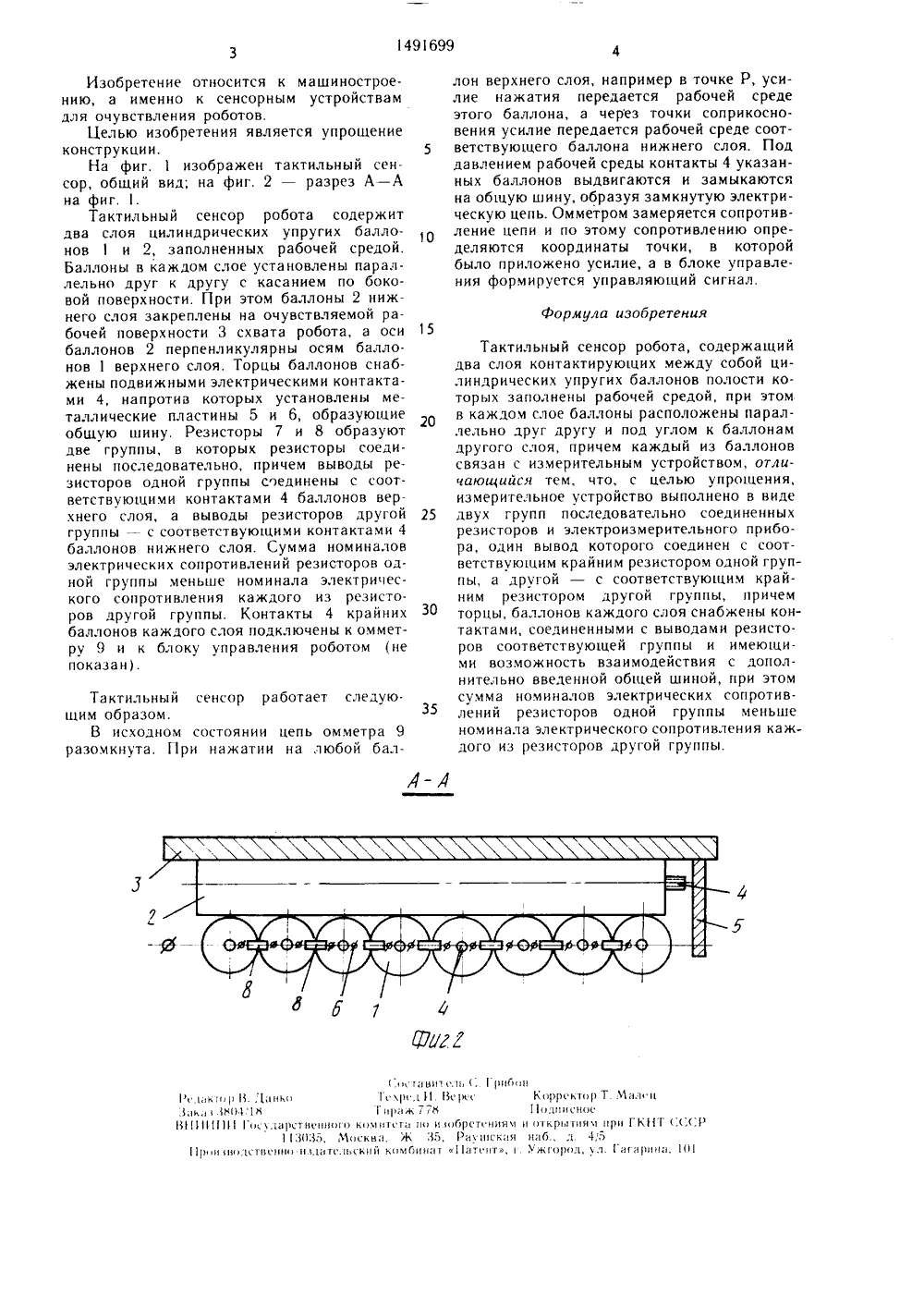
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 14916 ЕН ЕЛЬСТ титут ОТА ма. уст- ро упро- тельвиде нных езнс- вуюиг 1 ГОСУДАРСТВЕННЫИ НОМИТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТПРИ ГКНТ СССР ОПИСАНИЕ К АВТОРСКОМУ СВ(71) Белорусский политехническик ннс(54) ТАКТИЛЬНЫЙ СЕНСОР РОБ(57) Изобретение относится к областшиностроения, а именно к сенсорнымройствам очувствления промышленныботов, Целью изобретения являетсящение конструкции. г(ля этого измериное устройство сенсора выполнено вдвух групп последовательно соединерезисторов 7 и 8 Каждая группа рторов расположена напротив соответст(5 И 4 В 25,1 15 00, / В 25 .1 19 щего слоя баллонов 1 и 2. Г 1 ри этом баллоны,заполнены рабочей средой и расположены в каждом слое параллельно друг другу н под углом к баллонам другого слоя. Торцы баллонов снабжены подвижными контактами 4, соединенными с соответствующими выводами резисторов Сумма номиналов электрических сопротивлений резисторов одной группы меньше номинала электрического сопротивления каждого из резисторов другой группы. При нажатии на один из баллонов верхнего слоя в какой-либо точке усилие передается рабочей среде этого баллона и через точки соприкосновения рабочей среде соответствующего баллона нижнего слоя. Контакты этих баллонов выдвигаются н замыкаются на общую шину. Омметром 9 определяется величина сопро- а тивления образованной цепи. По этому сопротивлению определяют координаты точки,к которой было приложено усилие. 2 и,:)или , 1)( Тирик ТТК )няписннеН 11111111 Гн(1.(ирстненннго кли(сти пн иинпретнияч н нткры гияч при ГК 1 Г (Х(;Р) 1;135, М(скип, Ж З 5, Ри) гиския б,(. 4,51)рни (ял(стяннн и л(итеги скиг( лнмвинт 11 тс нт, ( Уккго)ии(, ел игвини, 11 Изобретение относится к машиностроению, а именно к сенсорным устройствам для очувствления роботов.Целью изобретения является упрощение конструкции.На фиг, 1 изображен тактильный сенсор, общий вид; на фиг. 2 - разрез А - А на фиг. 1.Тактильный сенсор робота содержит два слоя цилиндрических упругих баллонов 1 и 2, заполненных рабочей средой, Баллоны в каждом слое установлены параллельно друг к другу с касанием по боковой поверхности. При этом баллоны 2 нижнего слоя закреплены на очувствляемой рабочей поверхности 3 схвата робота, а оси баллонов 2 перпенликулярны осям баллонов 1 верхнего слоя, Торцы баллонов снабжены подвижными электрическими контактами 4, напротив которых установлены металлические пластины 5 и 6, образующие общую шину. Резисторы 7 и 8 образуют две группы, в которых резисторы соединены последовательно, причем выводы резисторов одной группы с)единены с соответствующими контактами 4 баллонов верхнего слоя, а выводы резисторов другой группы - с соответствующими контактами 4 баллонов нижнего слоя. Сумма номиналов электрических сопротивлений резисторов одной группы меньше номинала электрического сопротивления каждого из резисторов другой группы. Контакты 4 крайних баллонов каждого слоя подключены к омметру 9 и к блоку управления роботом (не показан). Тактильный сенсор работает следую. щим образом.В исходном состоянии цепь омметра 9 разомкнута. При нажатии на любой баллон верхнего слоя, например в точке Р, усилие нажатия передается рабочей среде этого баллона, а через точки соприкосновения усилие передается рабочей среде соот ветствующего баллона нижнего слоя. Поддавлением рабочей среды контакты 4 указанных баллонов выдвигаются и замыкаются на общую шину, образуя замкнутую электрическую цепь. Омметром замеряется сопротивление цепи и по этому сопротивлению определяются координаты точки, в которой было приложено усилие, а в блоке управления формируется управляющий сигнал. Тактильный сенсор робота, содержащий два слоя контактирующих между собой цилиндрических упругих баллонов полости которых заполнены рабочей средой, при этом в каждом слое баллоны расположены параллельно друг другу и под углом к баллонам другого слоя, причем каждый из баллонов связан с измерительным устройством, отличающийся тем, что, с целью упрощения, измерительное устройство выполнено в виде двух групп последовательно соединенных резисторов и электроизмерительного прибора, один вывод которого соединен с соответствующим крайним резистором одной группы, а другой - с соответствующим крайним резистором другой группы, причем торцы, баллонов каждого слоя снабжены контактами, соединенными с выводами резисторов соответствующей группы и имеющи. ми возможность взаимодействия с дополнительно введенной общей шиной, при этом сумма номиналов электрических сопротивлений резисторов одной группы меньше номинала электрического сопротивления каждого из резисторов другой группы,
СмотретьЗаявка
4262815, 15.06.1987
БЕЛОРУССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ХУТСКИЙ ГЕННАДИЙ ИВАНОВИЧ, ПЛЮГАЧЕВ КУЗЬМА ВИТАЛЬЕВИЧ, АНТОНОВ МИХАИЛ МАРТИЯНОВИЧ, НОВИЧИХИН РОМАН ВАСИЛЬЕВИЧ, ПАВЛОВЕЦ ВАСИЛИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B25J 15/00
Метки: робота, сенсор, тактильный
Опубликовано: 07.07.1989
Код ссылки
<a href="https://patents.su/2-1491699-taktilnyjj-sensor-robota.html" target="_blank" rel="follow" title="База патентов СССР">Тактильный сенсор робота</a>
Тактильный сенсор промышленного робота

Номер патента: 1074711
Опубликовано: 23.02.1984
Автор: Шварцман
МПК: B25J 15/00
Метки: промышленного, робота, сенсор, тактильный
...жидкостью, например трансформаторным маслом. Между собой полости 11 - 14 разделены перегородками 15 - 19 кольцевого сечения и содержат замкнутые полости, заполненные той же жидкостью, Стенки перегородок и лист 10 конструктивно представляют собой одно целое. Торцы перегородок 15 - 19 контактируют с дат чиками 1 - 9, так, например, полости перегородок 16 и 18 контактируют с датчиками 2, 5 и 8 (фиг. 5). Полости 11 - 14 также контактируют с датчиками. Так, например, на фиг. 2 показано контактирование полостей 12 и 14 с датчиками 3, 5 и 7, а на фиг. 6 и фиг, 7 - контактирование поло стей 11 - 14 с датчиком 5.Во всех случаях полости контактируютс датчиками через тонкий слой материала листа 10, например полости 12 и 14 контактируют с...
Тактильный сенсор промышленного робота

Номер патента: 1371902
Опубликовано: 07.02.1988
Автор: Шварцман
МПК: B25J 15/00, B25J 19/02
Метки: промышленного, робота, сенсор, тактильный
...нрцвцлникцв, ццдклксл)ых к измерительнцлх устрс)йству систлы уцравления роботцл или к уцрдвлякнцеи ЭВЧ.1 ктильный снсцр рд(от;ит сле,р,кнцим цбрдзцч.11 ри црилс)женин лсцлия лжлл,1)тци. кчи 1 9 цернцликхлярцо )цверхцкти сн(цр;), например Р л ццлцсти 14, ццо цсрс Лается жидк(ктид)ц.)цякн)сей )нлость 14, которая чгнцвс 1)ц црелдет лдвление на л;цики 4, 5, 7 и 8 цс рсз стн(ли 2 О и 21 1 ри эцм соотвсс ) вс книнес и,)ия цри.с )с(ктся к се) л(сцтдч 26, ири,с)дк(цич к стс илч 2 и 21 и ич;)ндлцгццныч (.И) ндлы этих СС)Мц ГСВ, цр(НН)рцнцис)ЛЬНЫЕ ЛСИЛИК Р нн(ццдют чесгц црилцжения и интцсинвсгь цри.иженццп лсилия Р). 1.сли к ццврхцсс)и сшкцр бу.сс) ирилжев лси.)ис 1)ц.1 л глоч л нцв рхццс) и, )ц такк лсилис рслл(1,(ындлся и;1 Л)с...
Тактильный сенсор

Номер патента: 1781029
Опубликовано: 15.12.1992
Авторы: Андарало, Васильев, Прокошин, Ярмолович
МПК: B25J 19/00, B25J 19/02
Метки: сенсор, тактильный
...постоянных магнитов в форме миниатюрных цилиндров, обращенных одноименными полюсами к такому же полюсу большого магнита, с прикрепленными к ним неферромагнитными частями в виде полусфер, выступающих над пластиной, причем каркас выполнен из неферромагнитного материала и установлен между большим магнитом и пластиной, имеющей с каркасом соосные отверстия для размещения штоков, а магниточувствительные элементы выполнены на основе пленки магнитомягкого материала (например, пермаллоя), функционируют на планарном эффекте Холла и расположены в плоскостях, проходящих через оси симметрии большого магнита и каждого из штоков в окрестности точек, где.составляющая вектора индукции магнитного поля, параллельная оси симметрии штока, обращается в...
Устройство для определения рабочего слоя биметаллической магнитной ленты

Номер патента: 360627
Опубликовано: 01.01.1972
Автор: Рылешников
МПК: G01R 33/12
Метки: биметаллической, ленты, магнитной, рабочего, слоя
...Стержень 2, сво. бодно перемещаемый в корпусе 4 устройства, прижат к кулачку 8 при помощи пружины 5. Для смягчения даров межд флаццсм 6 стержня 2 и корпусом 4 установлена эластичная прокладка 7. Головка 1 жестко связана с источником постоянного магнитного поля и смонтирована с возможностью перемещения совместно с нпм поперек ребра биметаллической магнитной ленты 8 вдоль ее плоскости..Лента 8 неподвижно установлена ца эластичной подложке 9. В качестве источника посто.10 яцного магнитного поля может служить какпостоянный магнит, укрепленный на головке 1, так и ее рабочий зазор, если в обмотку головки подается постоянный ток, Источник 10 постоянного тока может быть подключен к от дельцой обмотке цли в той же обмотке, с которой снимают...
Способ нанесения теплоизолирующего слоя песка на рабочую поверхность изложницы при центробежной отливке однофланцевых труб

Номер патента: 139406
Опубликовано: 01.01.1961
МПК: B22D 13/10
Метки: изложницы, нанесения, однофланцевых, отливке, песка, поверхность, рабочую, слоя, теплоизолирующего, труб, центробежной
...авный Известны способы центробежнои отлив х труб. Однако применение известны.; способове обеспечивает равномерное нанесение теплоизо в требуемых пределах длины изложницы.Особенность предлагаемого способа заключается в том, что, с целью удержания теплоизоляционного слоя песка в пределах формы, а также для получения чугунных труб без отбела, а стальных - без поверхностных трещин, в литейной форме устанавливают стержень для оформле 1 ия фланца так, что он образует со стволом изложницы кольцевой уступ, равный толщине слоя песка, засыпанного в изложницу.Сущнос 1 ь описываемого способа заключается в том, что отливку однофланцевых чугунных и стальных труб производят на горизонталь. ной центробежной литейной машине с применением для...
Предыдущий патент: Уравновешенный манипулятор
Следующий патент: Захват манипулятора
Случайный патент: Способ укрепления грунта