B25J — Манипуляторы; камеры, оборудованные манипуляторами
Приводной шарнир манипулятора

Номер патента: 1159775
Опубликовано: 07.06.1985
Авторы: Дьяков, Комаров, Фельдман, Филонов
МПК: B25J 17/00
Метки: манипулятора, приводной, шарнир
...исполнения, кроме того, большое количество шарнирно-связанных между собой звеньев чхчдшает точность позиционирования.Цель изобретения - упрощение конструкции приводного шарнира манипулятора и повышение точности позиционирования.Цель достигается тем, что в приводном шарнире манипулятора, содержащем шаровой палец, соединенный посредством входного вала с первым винтовым моментным цилиндром, и шаровую опору, соединенную посредством выходного вала с вторым винтовым моментным цилиндром, причем шаровой палец и шаровая опора связаны меж-. дч собой, шаровой палец снабжен лопаткой, а шаровая опора выполнена в виде лопасти и связана с лопаткой соединением типа паз - выступ.На фиг. 1 изображен приводной шарнир, осевой разрез; на фиг. 2 -...
Исполнительный орган манипулятора

Номер патента: 1161370
Опубликовано: 15.06.1985
Авторы: Иванов, Казыханов, Параскевопулос
МПК: B25J 3/00
Метки: исполнительный, манипулятора, орган
...через подшипниккачения с деталью 3 одного из звеньев нижней телескопической пары, а сам винт 25 посредством шлицевогосоединения жестко связан с основанием 5. Кроме того, на валу 23 промежуточной передачи на подшипнике скольжения расположено цилиндрическое колесо 26, В подвижной платформе 8, которая выполняет Функцию водила, встроены на подшипниках качения цилиндрические шестерни .27 (сателлиты), а во внутреннюю полость звена 3 жестко насажено колесо 28 (солнеч" ное) с внутренним зацеплением. Колесо 26 и 28 и шестерни 27 образуют . планетарный (эпициклический) механизм. Шестерни 13 и 16 снабжены Фрикционными электромагнитными муФ- тами 29 и 30, и аналогичные муФты 31-33 связывают с валом 10 и винтом21 шестерни 14, 15 и колесо 19...
Манипулятор

Номер патента: 1161372
Опубликовано: 15.06.1985
Авторы: Баранов, Самсонов, Усольцев
МПК: B25J 11/00
Метки: манипулятор
...собойчерез промежуточное звено параллелограммов, привод перемещения и управляющий рычаг привод перемещения механической руки выполнен в виде силового цилиндра с закрепленным наего штоке кулачком, установленнымс возможностью взаимодействия суправляющим рычагом, а последний од Оним концом шарнирно смонтирован наосновании и подпружинен, а другимконцом шарнирно связан со звеном конечного параллелограмма механической рукиэ при этОм штОк силОВОГО 25цилиндра шарнирно связан со звеномдругого параллелограмма механической руки.На чертеже представлена кинематическаясхема предлагаемого манипуля- ЗО. тора,Манипулятор включает в себя основание 1, силовой цилиндр привода 2механической руки и регулируемый кулачок 3, установленный на его штокеКонечный...
Схват его варианты

Номер патента: 1161374
Опубликовано: 15.06.1985
МПК: B25J 15/00
...в корпусе 1 на общемшарнире 2 двунлечие .рычаги 3, на .одном плече каждого из которых уста Оновлены губки 4, а на другом - основные постоянные магниты 5. Последниеобращены друг к другу одноименнымиполюсаия и. при сонрикосковекии другс другом образуют клин. Привод представляет собой пневмоцнлиндр, выпол-ьненный в корнее 1, в котором каштоке 6 установлен поршень 7, выполненный из дополнителькьм постоянныхмагнитов,а рабочая поверхность . 20поршня выполнена по Форме, соответствующей Форме клина, образуемогоосновными постоянными магнитамирычагов при йх соприкосновении. Одноименные полюса дополнительных и Иоеновньк постоянньм магнитов расположены друг против друга. Позицией 8 обозначена деталь.Схват .по второму варианту содержат расположенные...
Схват

Номер патента: 1161375
Опубликовано: 15.06.1985
Авторы: Добролюбов, Лебедев
МПК: B25J 15/00
Метки: схват
...4 Изобретение относится к роботостроению и может быть использовано в исполнительных органах роботов и манипуляторов, предназначенных для захвата и переноса деталей. 5Цель изобретения - обеспечениестабильности усилия зажима за счетвведения в механизм передачи движенияот привода к губкаы упругого элемента,На чертеже схематически представлен предлагаемый схват.,Подвижные губки 1 кинематическисвязаны винтам 2 винтовой пары сгайкой 3, установленной в корпусе 4.К торцу гайки 3 одной стороной прижатИкзакрепленный в корпусе 4 упругий элемент в виде диска 5. С другой стороныупругого диска 5 расположены прижатыек нему тела Ь качения, размещенные вдорожках качения кольца 7, Последнее 20при помощи шайбы 8 связано с ведущимвалом 9 привода 1 О,...
Схват

Номер патента: 1161376
Опубликовано: 15.06.1985
Авторы: Крючков, Мезивецкий
МПК: B25J 15/00
Метки: схват
...втулок, причем один изрычагов каждой группы зажимных губокснабжен дополнительным плечом, размещенным в пазу тяги с возможностьюсвободного хода, а все остальныеплечи каждого многоплечего .рычагапредназначены для взаимодействия с, пазами центральных втулок и зажимныхгубок, подпружиненных относительно:Вкорпуса, кроме тото, тяга размещенаперпендикулярно оси схвата, а центральные втулки - вдоль его оси, приэтом привод выполнен трехпозиционным.35На фиг. 1 схематически представленпредлагаемый схват, разрез; нафиг. 2 - разрез А-А на фиг, 1.Схват содержит корпус 1, установленные на его торцах два комплектазажимных губок 2, расположенных такимобразом, что один комплект губок смещен относительно другого комплекта воплоскости расположения губок...
Схват

Номер патента: 1161378
Опубликовано: 15.06.1985
Авторы: Абрамов, Верещагин, Дульгеров, Калугин, Листов, Новиков
МПК: B25J 15/00
Метки: схват
...протыкание заготовки с двух сторон, зубчатой рейки 16, соединяющейся пазами 17 посредством гайки 18 с .жесткой тягой б. 5 ОВакуумный захватный элемент 5 состоит из пневмоцилиндра 19, закреп- . ленного на штанге 3 посредствомшаровой опоры 20, шайбы 21, траверсы 22, штока 23 с отверстием 24, резиновой уплотнительной манжеты 25; отверстия 26, клапана 27 и пружин 28 и 29. Захват заготовки механическимизахватными элементами осуществляетсяследующим образом.Шток 7 привода, выдвигаясь посредством шатуна, поворачивает кривошип 9.Последний через шатуны 10 втягиваеттяги 6, перемещая закрепленные наних зубчатые рейки 16, которые пово 1 ачивают зубчатые колеса 15 с закрепленными на них иглами 14, Последние,оповорачиваясь на угол 180 ,...
Манипулятор для длинномерных объектов

Номер патента: 1161380
Опубликовано: 15.06.1985
Авторы: Безмен, Бондаренко, Евтухов, Семенов
МПК: B25J 19/00
Метки: длинномерных, манипулятор, объектов
...захватываемого объекта относительно 16 схвата манипулятора й определения типа захватываемого объекта. гНа чертеже изображена блок-схема предлагаемого манипулятора, 13Манипулятор .содержит установленные на губках 1 и 2 схвата датчики 3 и 4 веса, выходы которых подключены к входам блока 5 сумматора и блока 6 сравнения, выходы которых соединены Ю с входом блока 7 определения и индикации знака, множительный блок 8, в котором происходит вычисление длины захватываемого объекта, соединенный с выходом блока 9 задания весаодного 25 метра захватываемого объекта и с выходом блока 5 суммирования, блок 10 выработки команд, к одному из входов которого подключен выход блока 5 сравнения, а к другим входам - выходыЗр блока 7 определения и индикации...
Устройство для переноса заготовок между позициями обрабатывающей машины

Номер патента: 1162534
Опубликовано: 23.06.1985
Авторы: Ермаков, Михеев, Пашков, Ползиков, Шевченко
МПК: B21D 43/00, B21J 13/08, B25J 9/00 ...
Метки: заготовок, между, обрабатывающей, переноса, позициями
...1. Внутри гильзы установлен вал 12, на котором установлено вращающееся уплотнительное соединение 13. Вал 12 связан кинематически с валом 5 тросами 14 и удерживается от поворота вилкой 15, закрепленной на корпусе 11 винтами 16. На гильзе 9 на конической шейке установлено зубчатое колесо 17, входящее в зацепление с рейкой 3, В корпусе 6 установлен фиксирующий винт 18. Захватный орган 4 соединен штоком 19 с поршнем 20 пневмоцилиндра 7. На штоке 19 установлена пружина сжатия 21. Привод вращения рук закрыт кожухом 22. Механизм перек разъема штампа.Без дополнительного вращения схвата механизм перекладки работает сле" 40 дующим образом (фиг, 2 и 4),Винт 18 вводится в тело ва- "ла 5 и препятствует его враще-нию относительно корпуса 6, авилка...
Промышленный робот

Номер патента: 1162590
Опубликовано: 23.06.1985
Авторы: Васильев, Потачинский, Силютина
МПК: B25J 11/00
Метки: промышленный, робот
...по направляющей 5 к порталу от пневмоцилиндра 6. Каретки 7 и 8 также перемещаются по направляющей 5 и связаны между собой при помощи цилиндра 9, В каждой из кареток 7 и 8 имеются фиксаторы 10 и 11, которые фиксируются по пазам планки 12, жестко связанной с направляющей 5.Барабан 13 с жесткими ограничителями 14, расположенный на каретке 7, позволяет ограничивать величину шага перемещения кареток 7 и 8 относительно одна другой. Гидродемпфер 15 служит для безударного останова механизма подъема в конце горизонтального хода, упор 16 - для точного позиционирования механизма 1 подъема в точке остановки, а опоры 17 и 18 для привязки манипулятора к токарному станку,Промышленный робот в составе робототехнологического комплекса для токарной...
Автоматическое устройство (его варианты)

Номер патента: 1165227
Опубликовано: 30.06.1985
МПК: B25J 11/00
Метки: автоматическое, варианты, его
...55фиг. 2 - первый вариант исполненияавтоматического устройства, поперечный разрез; на фиг. 3 - второй вариант исполнения автоматического устройства, поперечный раэрез.Автоматическое устройство состоит из плеча 1, несущего корпуса 2, установленного на конце плеча 1, и поворотного механизма 3, неподвижно прикрепленного к несущему корпусу 2. Поворотный механизм 3 представ ляет собой механизм, который приводится в действие давлением воздуха или жидкости. На валу 4 поворотного механизма 3 установлен стопор 5 и цапфа 6 с рукой 7, Поэтому, когда вал 4 поворотного механизма 3 вращается, рука 7 и стопор 5 также вращаются (см. стрелку А). В результате, когда вал 4 вращается, стопор 5 входит в соприкосновение с пальцем 8 амортизатора 9, в котором...
Захватное устройство

Номер патента: 997364
Опубликовано: 07.07.1985
Авторы: Козырский, Степанов, Шлыкова
МПК: B25J 15/00
Метки: захватное
...два зубчатых сектора 3 и 4, 5 и 6,40выполненные заодно с зажимными рычагами - захватными губками. Из двухсекторов на каждом валу один секторпосажен жестко, другой - с воэможностью вращения на нем. Каждый жестко посаженный сектор одного валанаходится в зацеплении с сектором,установленным с возможностью вращения на другом валу. К валам 1 и 2жестко прикреплены рычаги 7 и 8 привода. Концы рычагов 7 и 8 шарнирносоединены с цилиндром 9 и штоком 10силового цилиндра.Для предотвращения выпадения заготовки из захвата при случайном 55отключении давления масла в гидросистеме поршень цилиндра может бытьснабжен замком для фиксации поршня в любом его положении в цилиндре относительно стенок последнего, конструкции таких замков известны. Для фиксации...
Схват

Номер патента: 1166987
Опубликовано: 15.07.1985
Авторы: Дешко, Хаджаев, Ценова
МПК: B25J 15/00
Метки: схват
...формы. 5Целью изобретения является повышение надежности работы эа.счет увеличения усилия зажима.На чертеже изображен предлагаемый схват, общий вид.10Схват содержит эластичную оболочку 1,. закрепленную при помощи колец 2 на корпусе силового цилиндра 3 и стакана 4, который жестко соединен с цельным штоком поршня 5 силового 15 цилиндра 3, причем на шток одета пружина возврата 6, Для подачи сжатого воздуха (или жидкости). в схват в штоке поршня 5 имеется осевое отверстие 7, для подвода сжатого воздуха 20 под эластичную оболочку 1 в цилиндре 3 имеются входные отверстия 8 и 9, а в штоковую полость цилиндра 3 - от верстие 10. Выступающая часть штока поршня 5 служит для крепления устройства к руке (не показан) робота.Схват работает...
Схват манипулятора

Номер патента: 1166988
Опубликовано: 15.07.1985
Автор: Шатайло
МПК: B25J 15/00
Метки: манипулятора, схват
...дополнительно введенные подпружиненные пальцыНа фиг. 1 показан предлагаемый схват, исходное положение; на фиг.2- то же, рабочее положение; на фиг.3 - то же, вид сбоку. 40Схват манипулятора содержит корпус 1, выполненный в виде рамки, к которому прикреплен пневмоцилиндр 2, шарнирно связанный посредством штока 3 и звеньев 4 с тремя губками 5, 6 и 7, вращающимися на оси 8, закрепленной в проушинах рамки 9 корпуса 1, На осях кронштейнов 10, приваренных к губкам 5 и 7, установлены цилиндры 11, в которых по О ступательно перемещаются телескопические звенья 12, к верхним концам которых прикреплены тросики 13 через блоки 14 и соединены верхними концами противоположных губок 5 и 7. 55 Цилиндры 11 через жестко соединенные с ними рычаги...
Рука манипулятора

Номер патента: 1166989
Опубликовано: 15.07.1985
Авторы: Артемов, Волченков, Зерний, Крючков, Мальцевский, Плеханов, Семенов, Скородумов
МПК: B25J 18/04
Метки: манипулятора, рука
...положение стержней 6 с двумя электромагнитными схватами 13 в вертикальной плоскости.Ось 3 смонтирована в основаниисо смещением влево в плоскости чертежа относительно центра тяжестивсей системы рычага, обойм., стерж- БОней и двух схватов, в результатечего за счет превьшения правой относительно оси 3 части указаннойсистемы микрометрический винт 10постоянно контактирует с конечным 55выключателем 9.Рейка 11 снабжена приводом 14обеспечивающим ее перемещение и вхождение в зацепление с зубчатым колесом 4.Рука манипулятора работает следующим образом.В соответствии с предусмотренным циклом работы в робото-техническом комплексе для листовой детали руку робота со схватами 13, угловое положение которых заранее отрегулировано посредством...
Гибкое плечо

Номер патента: 1168089
Опубликовано: 15.07.1985
МПК: B25J 1/02
...мог поворачиватьсяв любом требуемом направлении относительно вала 22. Так выполнено шаровое соединение центрального участка 24 вала 22 и кольцевого конца25 штока 21, К обоим концамвала 26, который проходит с возможностью вращения через тяги 23, при-.соединена с возможностью вращенияпара вторых элементов 27 в видепланок. Последняя присоединена свозможностью вращения к первым элементам 19 плеча посредством валов 2 О28. Пара третьих элементов 29 плеча,обращенных широкими сторонами другк другу, присоединена с возможностьювращения к вторым элементам 27 плеча посредством валов 30 и дополни- дтельно соединена с возможностью вращения с одними концами пары тяг 31(элементов связи), соединенных черезвалы 32, Другие концы спаренных тяг31 соединены...
Кисть промышленного робота

Номер патента: 1168090
Опубликовано: 15.07.1985
Авторы: Рио, Сейитиро, Синсуке, Хадзиму
МПК: B25J 15/00
Метки: кисть, промышленного, робота
...Верхние концевыеучастки поддерживающих кронштейнов.21 и 22 присоединены с возможностьюскольжения и вращения к обоим концам независимого звена - шатуна 23с помощью штифтов 24 и 25, Центральная часть шатуна 23 поддерживаетсяна неподвижном кронштейне 20 с помощью штифта 26 так, что шатун 23может поворачиваться. Шток 27 газового цилиндра 28 связан с концевой частью кронштейна 29, присоеди-.ненного к нижнему концу одного изподдерживающих кронштейнов 21 или22. В результате этого при движении взад и вперед поршня 30 цилинд-ра 28 захватывающие пальцы 13 перемещаются параллельно друг другувдоль направляющих валов 3 1 и 32 спомощью упомянутого шатунного элемента, так что эти пальцы противостоят друг другу и осуществляютоперацию открывания и...
Клещевой схват манипулятора

Номер патента: 1168376
Опубликовано: 23.07.1985
Авторы: Гявгянен, Новак, Овсянников, Попов
МПК: B23Q 3/00, B25J 15/00
Метки: клещевой, манипулятора, схват
...- то же, план; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 - вариант схвата манипулятора с приводом на каждый схват; на фиг. 6 - то же, план; на фиг. 7 - узел 1 на фиг. 5.Клещевой схват манипулятора содержит корпус 1, на котором посредством оси 2 закреплен шарнирно-рычажный механизм 3 клещевого схвата с зажимными губками 4.На противоположном конце шарнирнорычажного механизма 3 установлен рабочий элемент-скалка 5 с закрепленной на ней пластиной 6 с выемкой В - криволинейной поверхностью, представляющей собой твердую преграду в виде полутороидной 5 1 О 15 20 25 30 35 40 45 чаши, Выемка В образована вращением полукруга радиусом К вокруг оси Г-Г, удаленной от оси его симметрии Д-Д на величину радиуса й...
Манипулятор для испытания электромеханических преобразователей

Номер патента: 1168400
Опубликовано: 23.07.1985
МПК: B25J 3/02, H04R 29/00
Метки: испытания, манипулятор, преобразователей, электромеханических
...состоящего из трех вертикальных рычагов, один из которых является частью вертикальной штанги 4 манипулятора, двух вертикальных рычагов 10 и 11 и трех горизонтальных рычагов 9, 12 и 13, шарнирно соединенных с вертикальными рычагами. Вращение преобразователя вокруг его продольной оси Х осуществляется приводом 6, который вращает коническую шестерню 14, неподвижно закрепленную на валу 15 и вращающую коническое зубчатое колесо 16, свободно вращающееся на валу 17, ось которого расположена перпендикулярно штанге 4 и рычагу 12 сдвоенного параллелограмма и проходит через точку пересечения их осей. Далее движение передается через шестерню 18, неподвижно закрепленную на валу 19, который вращается в подшипниках, закрепленных на рычаге...
Модуль движения робота
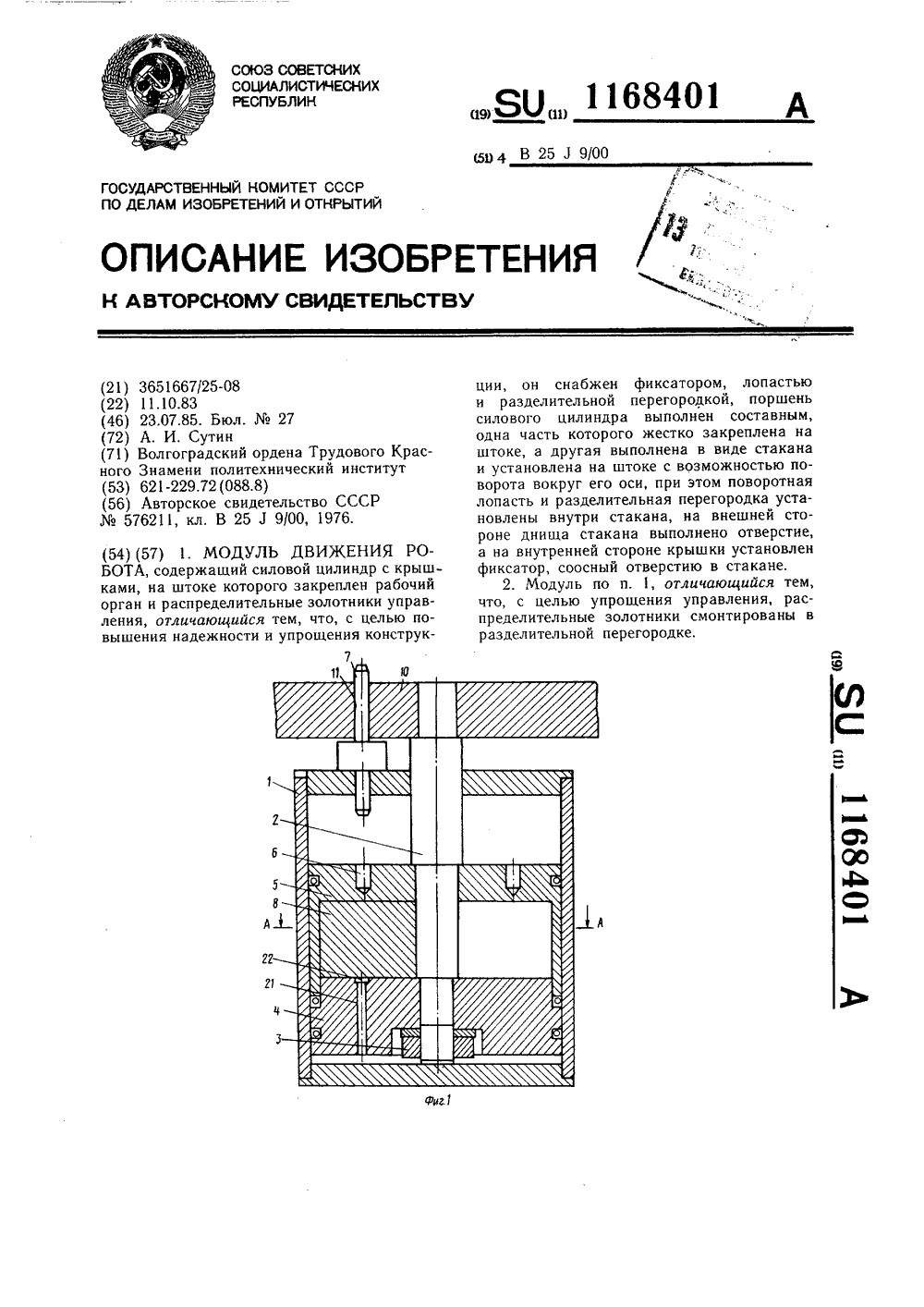
Номер патента: 1168401
Опубликовано: 23.07.1985
Автор: Сутин
МПК: B25J 9/00
Метки: движения, модуль, робота
...клапан 20 служат для отвода рабочего тела из полости 16. Канал 21 в теле поршня 4 и полукольцевая канавка 22 на торце поршня 4 обеспечивают сообщение нижней полости цилиндра 1 с полостью 16 стакана, как при повороте лопасти 9, так и при повороте разделителя 8. Канал 23 служит для подвода рабочего тела из верхней полости цилиндра 1 в полость 17 стакана 5. Канал 24 и обратный клапан 25 служат для отвода рабочего тела из полости 17,Модуль движения робота работает следующим образом.Исходным является положение, когда поршень 4 и рабочий орган 10 находятся в нижнем положении. При этом фиксатор 7 находится в отверстии 11 рабочего органа 10 и удерживает последний от проворота. При подаче рабочего тела в нижнюю полость цилиндра 1...
Электромагнитный схват

Номер патента: 1168402
Опубликовано: 23.07.1985
Авторы: Ханмамедов, Шваченко
МПК: B25J 15/06
Метки: схват, электромагнитный
...4 постоянного тока. На концах магнитопровода 1 расположены баллоны 5 из эластичного материала, заполненные сыпучим магнитным материалом. Кроме того, схват содержит два датчика 6 наличия детали, каждый из которых выполнен в виде высокочастотного генератора с обмоткой 7 колебательного контура, расположенной на магнитопроводе 1 над эластичными баллонами 5, два формирователя 8 сигнала, подключенных к выходам датчиков 6, и логический элемент ИЛИ-НЕ 9, к входам которого подключены формирователи 8 сигнала, а выход соединен с коммутатором 3. Захватываемая деталь обозначена позицией 10.Электромагнитный схват работает следующим образом.В исходном состоянии источник 4 постоянного тока отключен. При отсутствии детали в зоне схвата, т.е. вблизи...
Палец-ловитель

Номер патента: 1168403
Опубликовано: 23.07.1985
МПК: B25J 19/00
Метки: палец-ловитель
...подпружиненных относительно оси пальца-ловителя плунжеров, установленных в этих расточках с возможностью взаимодействия с торцом нецилиндрической приемной части. При таком выполнении приемной части пальца-ловителя она автоматически (под действием силы тяжести) принимает такое положение, когда ее цилиндрическая поверхность, являющаяся продолжением цилиндрической поверхности установочной части пальца-ловителя, оказывается сверху, а плоскость эксцентриситета принимает вертикальное положение. Необходимость в довороте шпинделя отпадает. Исключение из системы управления роботизированным комплексом системы управлением механизмом доворота шпинделя повышает надежность его работы.На фиг. 1 изображен палец-ловитель, общий вид; на фиг. 2 - вид А на...
Автоматический манипулятор

Номер патента: 1169807
Опубликовано: 30.07.1985
Авторы: Айхель, Засекин, Калугин, Оатул, Сибрин, Черноруцкий
МПК: B25J 11/00
Метки: автоматический, манипулятор
...При движении привода 28 схвзта 23 вправо штифт 25, соприкасаясь с фиксзтороч 24, займет правое угловое положение и повернет штангу 22, тогда тяга 21 и рыча) 20 тоже повернутся на своих осях так, (го поступление очере,Гной заготовки в желоб 26 будет невозхОжных). При движении схвата 23 влево штифт 25, соприкасаясь с фиксатором 24, займет левое х гловос положение и повернет штангу 22, тогдз тяга 21 и рычаги 20 тоже повернутся на свои.с осях так, что при своем движении рычащ обеспечат за.сват одной заготовки и цзправят ее по желобам 26 и 27 к схв)гх 23. 5 1 О 15 20 25 Сопряжение заготовки 15 с издслисч с)счШЕСтВЛяЕТСя ПОд дСИСтВИЕЧ ХСГИ 51 (Х Сторон), схвата 23. которо(р;)зв)(В;351 пр)30. дом 28 при движсци) его Вправо.При эточ...
Устройство для управления промышленным роботом
Номер патента: 1170428
Опубликовано: 30.07.1985
Авторы: Коломенцев, Кузнецов, Фурман
МПК: B25J 9/00, G05B 19/00
Метки: промышленным, роботом
...7, второй усилитель 8, 20привод 9 радиального перемещения,второй датчик 10 положения, датчик 11момента, датчик 12 ускорения, блок 13вычисления массы, дифференциатор 14,выпрямитель 15, ждущий мультивибратор 2516, блок 17 выборки-запоминания..т,Блок вычисления массы (Иг.2)включает первый делитель 18, первый19 и второй 20 квадраторы, сумматор21 и второй делитель 22, 30На Фиг.З указаны функциональныйблок 23, суюатор 24, делитель 25 иблок 6 фиксации уровня,Устройство работает следующим образом.В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы;.на первом его выходе появится сигнал, соответствующий требуемому перемещению привода 40 5 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от...
Резонансная механическая рука

Номер патента: 1171306
Опубликовано: 07.08.1985
Авторы: Акинфиев, Асташев, Фролов
МПК: B25J 9/00
Метки: механическая, резонансная, рука
...энергия пружины 3переходит в кинетическую энергиюзвена 2 и жестко связанного с нимфиксатором 8 звена 7, что обеспечивает интенсивный разгон звеньев, Посигналу одного из датчиков 11, кото-рый первый взаимодействует со звеном,фиксатор 8 расцепляется и под действием пружины 13 начинается интенсивноеперемещение звена 7 относительнозвена 2, причем .перед началом этогодвижения звено 7 уже обладает запасом кинетической энергии. После того,как подвижные звенья пройдут черезсредние положения, их кинетическаяэнергия будет переходить в потенциальную энергию пружин 3 и 13, что обеспечит их интенсивное торможение.Вблизи крайних положений звеньев,когда их скорости близки к нулю,фиксаторы 4 и 9 войдут в зацеплениеи зафиксируют звенья,...
Манипулятор

Номер патента: 1171307
Опубликовано: 07.08.1985
Авторы: Пономарев, Ханмамедов, Шваченко
МПК: B25J 9/00
Метки: манипулятор
...вырабатывают сигналы, соответствующие мгновенному значению направления усилияв звеньях 1-3 соответственно, Этисигналы поступают в управляющееустройство (не показано), напримерэлектронно-вычислительную машину(ЭВМ). ЭВМ определяет по заданнойпрограмме, какие звенья и в какомнаправлении должны быть повернуты,чтобы схват 8 переместился в заданную точку рабочего пространства манипулятора,Например, звено 3 со схватом 8 должно переместиться относительно основания 9 вверх, а затем звено 2 должно повернуться в шарнире 5 вокруг вертикальной оси, т.е, конец звена 2 должен переместиться в горизонтальной плоскости. В момент приб. лижения направления динамического усилия, действующего на звено 3, к вертикали срабатывает датчик 12 и ЭВМ подает...
Стенд для испытания роботов-манипуляторов

Номер патента: 1171308
Опубликовано: 07.08.1985
Авторы: Ефимов, Натбиладзе, Хоперия
МПК: B25J 11/00
Метки: испытания, роботов-манипуляторов, стенд
...положения схвата, котороеустановлено на основании.1 и выполне 15но в виде трех барабанов 2, установленных на ходовых винтах 3 с образо"ванием винтовых пар, снабженных датчиками 4 угла поворота и связанныхс винтом через пружину (не показано), 20На наружной поверхности барабанов2 выполнена винтовая канавка, шагкоторой равен шагу ходового винта,в которой расположены тросы 5, одниконцы которых связаны между собой, 2а другой конец каждого троса 5 закреплен на барабане 2, Тросы установлены в направляющих б.Выходы датчиков 4 соединены синформационным устройством 7, состоя ущим из индикаторов 8 соединенныхс выходами соответствующих датчиков4, вычислительного блока 9, подключенного к выходам индикаторов, ицифропечатающего блока 10,...
Кисть исполнительного органа манипулятора

Номер патента: 1171309
Опубликовано: 07.08.1985
Авторы: Виноградов, Шевяков
МПК: B25J 15/00
Метки: исполнительного, кисть, манипулятора, органа
...выходном валу 3 привода ротаций с возможностью продольного перемеще- що ния, например на шлицах, причем шлицевой венец полумуфты 19 укороченный, а шлицевое сопряжение выполнено с зазором. Полумуфта 20 установлена на шлицах на валу 4 ротации. Кинема тическая связь полумуфт 18 и 19 обеспечена взаимодействием диска, выполненного на полумуфте 18, и кольцевой канавки, выполненной на полумуфте 19, а кинематическая связь полу- муфт 19 и 20 обеспечена взаимодействием бурта полумуфты 19 и торца по" лумуфты 20. Пружина 21 обеспечивает замкнутое положение полумуфт 15 и 18 и разомкнутое положение полумуфт у 17 и 20 при работе без сменного инструмента, При работе со сменным ин струментом пружина 22 обеспечивает замкнутое положение полумуфт 17 и...
Захватное устройство

Номер патента: 1171310
Опубликовано: 07.08.1985
МПК: B25J 15/06
Метки: захватное
...ПО П е ес яте отл прижщ ЕМэЧТО ОН л и а захвати 0 снабжено ненным в виде ного ор Узлом ана к тяге Упругого э е выпол элемента, 3, Утройсвч а ютвощеес, , отлэлем теммьент вчто1Ыполнентаупругийрельчатойфор Иэ бретение от1строени носитсяа именнк машинозахвата О К Устплоских зРоиствам ектромагнэлбыть н аготовокдля агнитта пнспользова Но в ки может ти сферич к опорнойескоголовештРомьпилен ого РобачествесхваЗах ватноешарнир рхносаамповке,ота в лис - , дующимусройствстовойи образом о РаботаеЦель изобретс " При опОМ ев ает еленостиения - иусканиизахвата зэлектромхраненияорганаия положени я оси оэа счет соженную эагжен отовкогои повеповорачииваетсу 6,На фиг.1 покархности с ериеред захвато шарЭнане проиьно.осизаватРи НОВО ОУЗахватное с...
Манипулятор

Номер патента: 1172662
Опубликовано: 15.08.1985
Авторы: Березовик, Лукьянович, Спектор
МПК: B25J 1/02
Метки: манипулятор
...операций, и может быть использовано также в дистанционных манипуляторах, работающих в экстремальных условиях.фД 1 г"Целью изобретения является расширЬЧие Функциональных возможностей 1 О манрйулятора за счет. увеличения его степеней свободы: путем выполнения его рукава го 4 ованньм с различным направлением спиралей гофра,На фиг,1 изображен манипулятор, 15 общий вид; на фиг. 2 - разрез Л-А на фиг.1;Манипулятор содержит основание 1, соединенное через патрубок 2 с источником находящейся под давлением 2 О электрореологической суспензии не показан), электрический разъем 3. На последнем расположен эластичный рукав, выполненный в виде сильфона 4, на котором установлен схват 5 25 с приводом 6. Сильфон 4 состоит из трех чередующихся...