Устройство для управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1170428
Авторы: Коломенцев, Кузнецов, Фурман
Текст
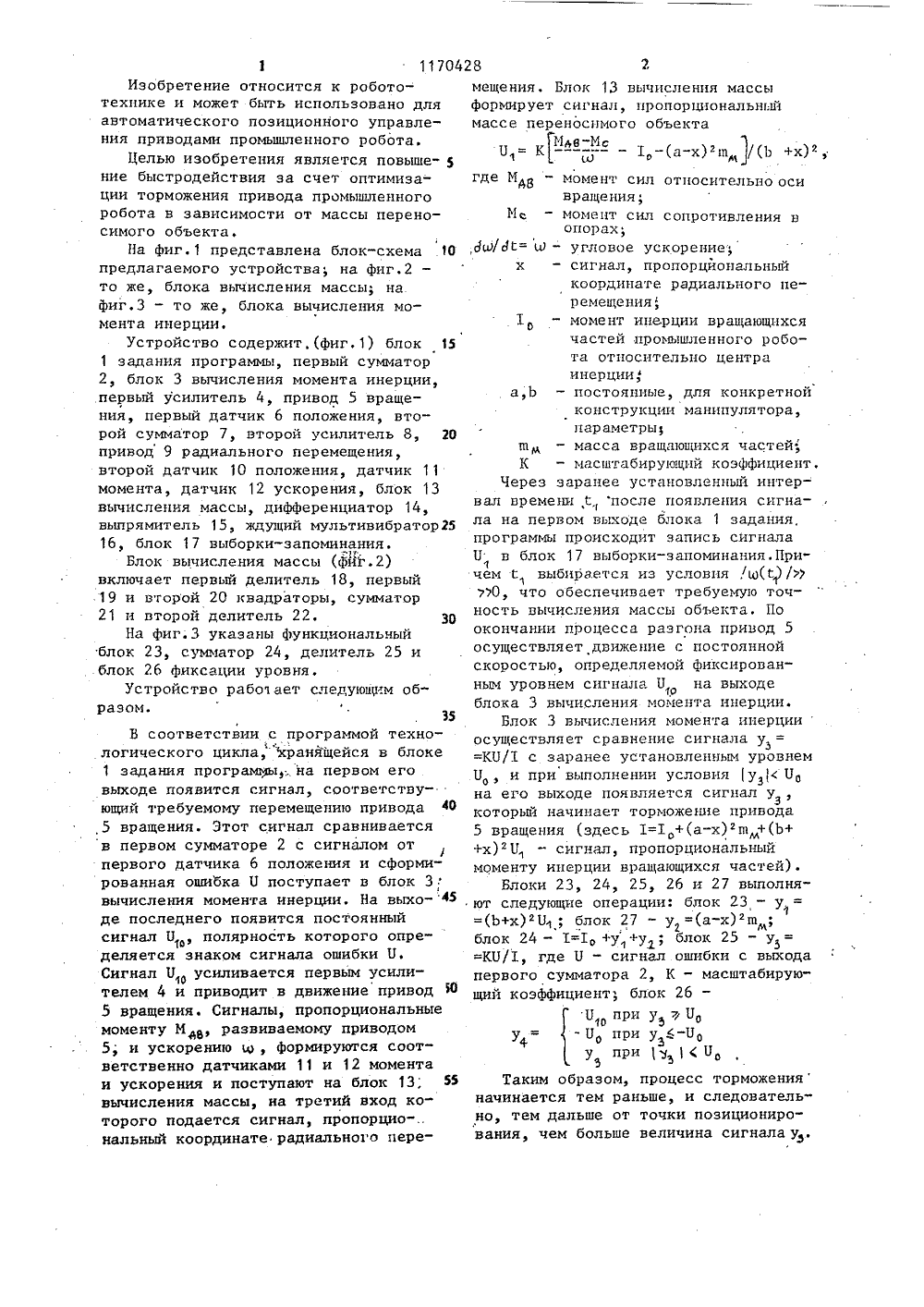
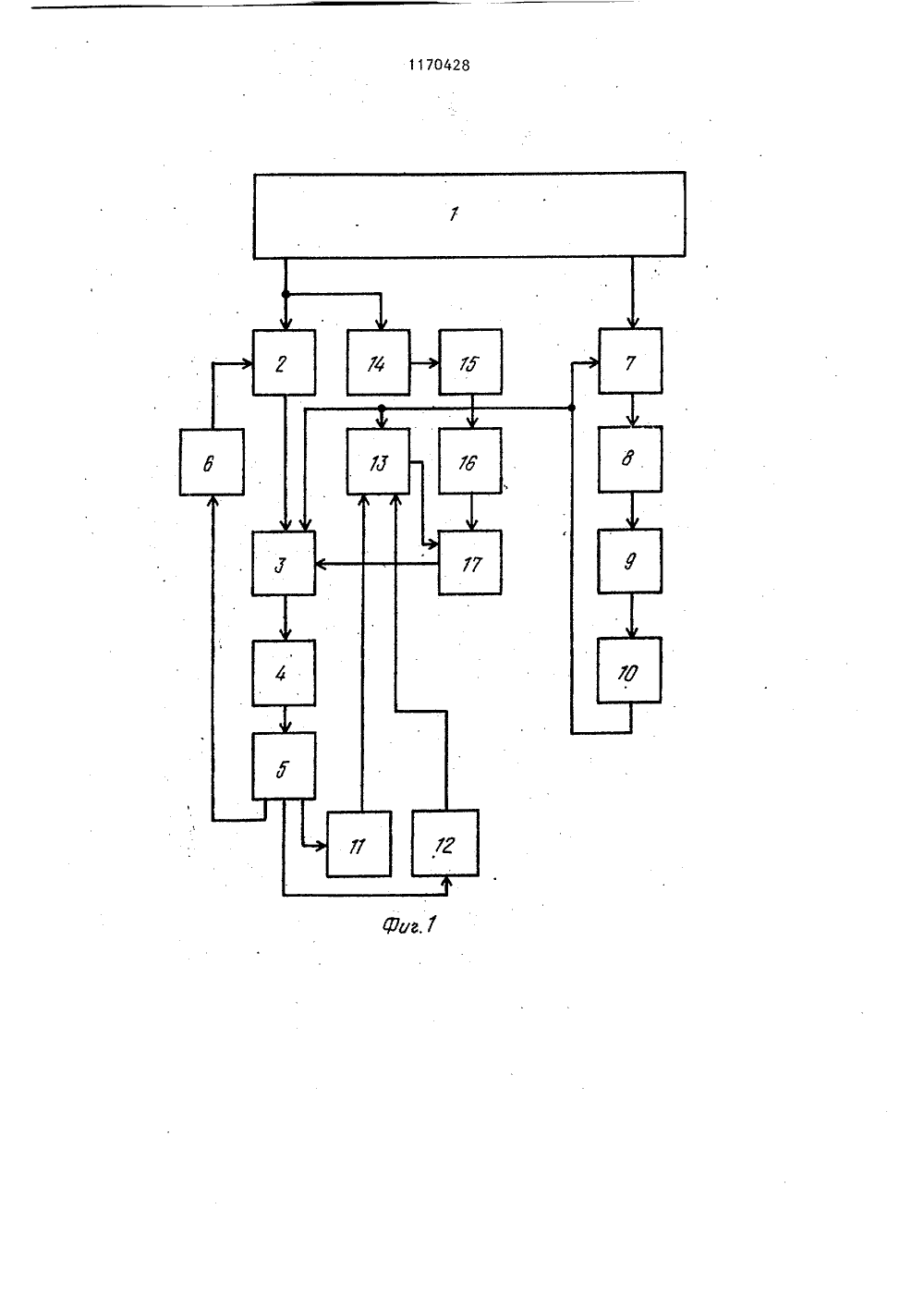
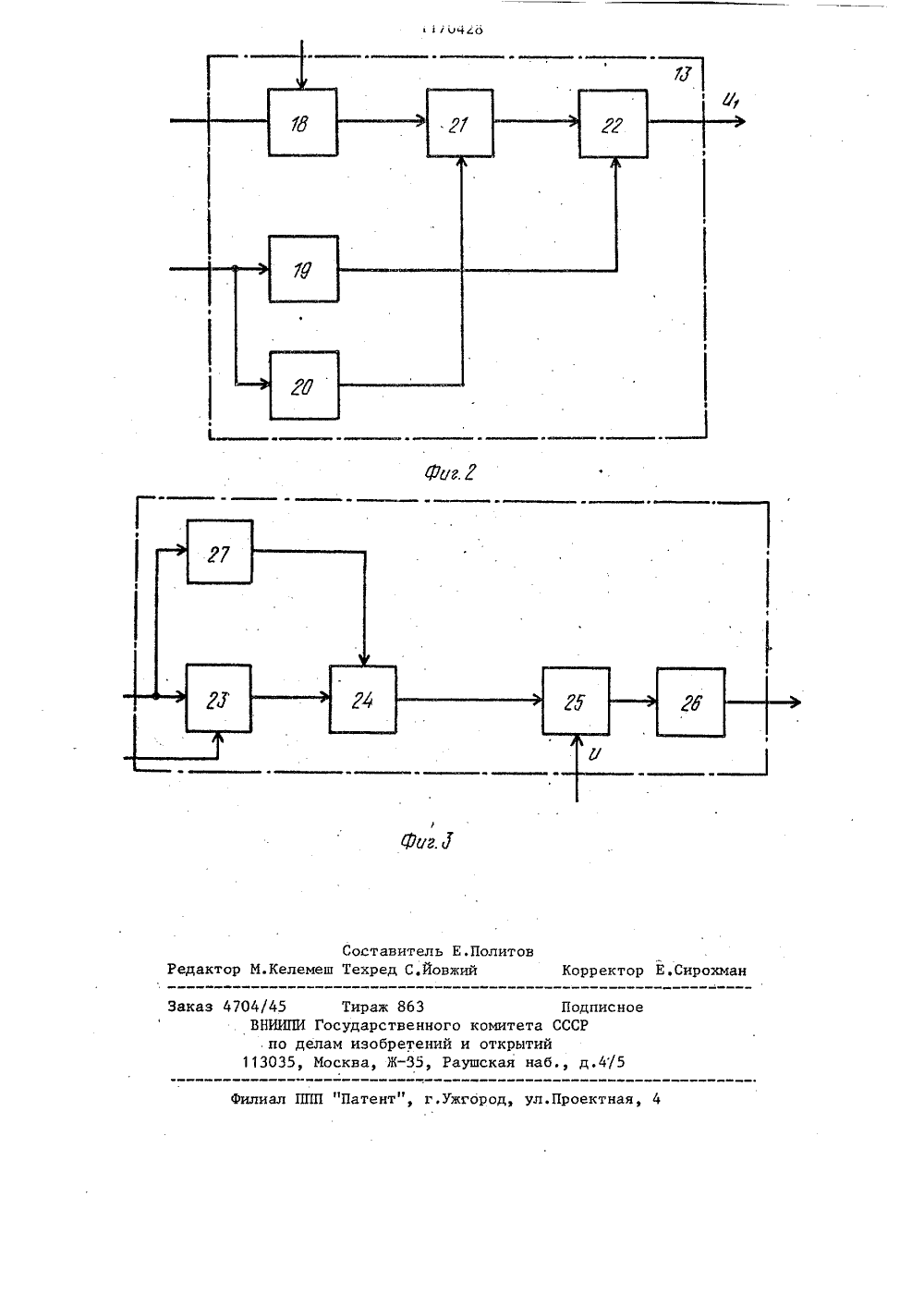
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН ОЛИСАНИЕ ИЗОБРЕТЕНИЯ ТОРСНОМУ СЕИДЕвиде В 25 Раи и к первому вра, соединенног орым выходом бл ду второго су вторым входом ока задания програмщ е е с я тем, что быстродействия ю л с цел повышени ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬГГИЙ(54) (57) 1 . УСТРОЙСТВО ДЛЯ,УПРАВЛЕНИЯПРОМЫШЛЕННЬК РОБОТОМ, содержащее последовательно соединенные блок задания программы, первый сумматор, блоквычисления момента инерции, первыйусилитель, привод вращения и первыйдатчик положения, выход которого подключен к второму входу первого сумматора, а также последовательно соединенные второй сумматор, второйусилитель, привод радиального переме"щения и второй датчик положения,выход которого подключен к Второмуходу блока вычисления момента ине ЯО 1170428(5)4 С 05 В 19/00; В 25 Л 9/Оустройства, оно содержит механически Связанные с приводом вращениядатчики момента и ускорения, блоквычисления массы и последовательносоединенные дифференциатор, выпрямитель, жцущи мультивибратор и блоквыборки-запоьынания, причем первый,второй и третий входы блока вычисления массы подключены соответственнок выходам датчиков момента и ускорения и второго датчика положения, авыход - через блок выборки-запоминания к третьему входу блока вьчисления моментаинерции, вход дифференцнатора соединен с первым выходом блоказадания программы,2. Устройство по п.1, о т л и -ч а ю щ е е с я тем, что блок вычисления массы содержит первый и второйквадраторы и последовательно соединенные первый делитель, сумматор ивторой делитель, выход которого подключен к выходу блока вычисленя массы, а второй вход - к выхоДу первогоквадратора, соединенного входом стретьим входом блока вычисления массы и входом второго квадратора, выходкоторого подключен к второму входусумматора, а первьп и второй входыблока вычисления массы соединены ссоответствующими входами первого делителя.428 1 1170Изобретение относится к робототехиике и может быть использовано дляавтоматического позиционного управления приводами промышленного робота.Целью изобретения является повышение быстродействия за счет оптимизации торможения привода промышленногоробота в зависимости от массы переносимого объекта,На фиг.1 представлена блок-схема 10предлагаемого устройства; на фиг.2то же, блока вычисления массы; нафиг.З - то же, блока вычисления момента инерции,Устройство содержит,(фиг,1) блок 151 задания программы, первый сумматор2, блок 3 вычисления момента инерции,первый усилитель 4, привод 5 вращения, первый датчик 6 положения, второй сумматор 7, второй усилитель 8, 20привод 9 радиального перемещения,второй датчик 10 положения, датчик 11момента, датчик 12 ускорения, блок 13вычисления массы, дифференциатор 14,выпрямитель 15, ждущий мультивибратор 2516, блок 17 выборки-запоминания..т,Блок вычисления массы (Иг.2)включает первый делитель 18, первый19 и второй 20 квадраторы, сумматор21 и второй делитель 22, 30На Фиг.З указаны функциональныйблок 23, суюатор 24, делитель 25 иблок 6 фиксации уровня,Устройство работает следующим образом.В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы;.на первом его выходе появится сигнал, соответствующий требуемому перемещению привода 40 5 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от первого датчика 6 положения и сформированная ошибка Н поступает в блок 3вычисления момента инерции. На выходе последнего появится постоянный сигнал Н , полярность которого определяется знаком сигнала ошибки П, Сигнал Н усиливается первым усилителем 4 и приводит в движение привод Ю 5 вращения. Сигналы, пропорциональные моменту М , развиваемому приводом 5, и ускорению ю, формируются соответственно датчиками 11 и 12 момента и ускорения и поступают на блок 13; 55 вычисления массы, на третий вход которого подается сигнал, пропорцио"нальный координате радиального перемещения, Блок 13 вычисления массы Формирует сигнал, пропорциональный массе переносимого объектаГМлв-Мс Н = К- ---- 1 - (а-х)ш /(Ь +х)и) о л.1 ф где М 8 - момент сил относительно осивращения, Мс - момент сил сопротивления вопорах; ,дФ/д= М - угловое ускорение; х - сигнал, пропорцйональныйкоординате радиального перемещения, 1 - момент инерции вращающихся частей промышленного робота относительно центра инерции, а,Ь - постоянные, для конкретнои конструкции манипулятора, параметры ш,А - масса вращающихся частей К - масштабирующий коэффициент, Через заранее установленный интервал времени, после появления сигнала на первом выходе блока 1 задания, программы происходит запись сигнала Н в блок 17 выборки-запоминания.Причем С выбирается из условия , Ю/)1)0, что обеспечивает требуемую точность вычисления массы объекта, По окончании процесса разгона привод 5 осуществляет движение с постоянной скоростью, определяемой фиксированным уровнем сигнала П на выходе блока 3 вычисления момента инерции.Блок 3 вычисления момента инерцииосуществляет сравнение сигнала у =ь =Ко/1 с заранее установленным уровнем Н , и при выполнении условия (уНо на его выходе появляется сигнал у который начинает торможение привода 5 вращения (здесь 1=1+(а-х)ш,+(Ь+ +х)Н - сигнал, пропорциональный моменту инерции вращающихся частей).Блоки 23, 24, 25, 26 и 27 выполняют следующие операции: блок 23 - у. =1 = (Ь+х)Н; блок 27 - у = (а-х) ш,; блок 24 - 1=1 о +у+у блок 25 - у = =КО/1, где Н - сигнал ошибки с выхода первого сумматора 2, К - масштабирующий коэффициент; блок 26 -Ппри уПр У - - Но при у ь-По у при , (СН5Таким образом, процесс торможения начинается тем раньше, и следовательно, тем дальше от точки позиционирования, чем больше величина сигнала у, 1170428Составитеелемеш Техред С.Й оли Корректор Е.С Редакто ж б 3 3 исно ППП "Патент", г,ужгород, ул.Прое 4704/45 Тираж ВНИИПИ Государств по делам изобр 113035, Москва, К ого комитета СССРий и открытий Раушская наб., д,4/
СмотретьЗаявка
3696603, 30.01.1984
МИНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
КУЗНЕЦОВ ВЛАДИМИР ПЕТРОВИЧ, КОЛОМЕНЦЕВ АЛЕКСАНДР ВАЛЕНТИНОВИЧ, ФУРМАН ФЕДОР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B25J 9/00, G05B 19/00
Метки: промышленным, роботом
Опубликовано: 30.07.1985
Код ссылки
<a href="https://patents.su/4-1170428-ustrojjstvo-dlya-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления промышленным роботом</a>
Устройство для вычисления массы нефте-продуктов b резервуарах

Номер патента: 845159
Опубликовано: 07.07.1981
Авторы: Абдуллаев, Вахабов, Кязимов, Мустафаев, Таги-Заде, Щербинин
МПК: G06F 17/00
Метки: вычисления, массы, нефте-продуктов, резервуарах
...Г Я0устройство работает следующим образом.После пуска генератора 12 нулевым тактом распределителя тактов 13все счетчики сбрасываются в нулевоесостояние. В первом такте распределителя тактов 13 добавляется "1"в старший разряд 2 счетчика 3 приемаинформации, имеющий десятичное значение -1). С помощью дешифратора 5на втором такте распределителя старший разряд счетчика приема информации автоматически выбирает число 5,заранее записанное в блок памяти б.Одновременно со вторым тактом распределителя из памяти б считывается число 5 , которое параллельно записывается в буферный регистр 7, и запускается Формирователь 8 тактов и сдвигов. На втором такте триггер 14 запре Ощает вход распределителя 13 и за счеттактов Т 1 и Т 2, выдаваемых...
Блок вычисления логических функций
Номер патента: 1800465
Опубликовано: 07.03.1993
Авторы: Зарембовская, Мельников, Новиков, Фадеева
МПК: G06F 15/419
Метки: блок, вычисления, логических, функций
...путь, выходящий направо из графа или вниз.Можно любому графу сопоставить некоторую булевую функцию так, чтобы вершины графа были взвешены аргументами функции, а значение функции при зададанных аргументах определялось движением по графу из начальной вершины к тому или иному выходу графа и принимало значение единицы при выходе из графа направо (й), а значение нуля - при выходе вниз (О).Примеры графов микропрограмм для некоторых логических элементов, изображенных на фиг, 4, представлены на фиг.5. менной; В - признак инверсии весовой переменной; й, О - адреса перехода соответственно право и вниз.При В = 1 переменная Ъ инвертируется. Если значение Е с учетом значения В равно 1, то выбирается адрес Я и по нему производится обращение к...
Устройство для вычисления массы нефти и нефтепродуктов в резервуарах

Номер патента: 1117653
Опубликовано: 07.10.1984
Авторы: Агадов, Алиев, Дамиров, Исмайлов, Летов, Тер-Хачатуров
МПК: G06F 17/00
Метки: вычисления, массы, нефтепродуктов, нефти, резервуарах
...преобразователь, реверсивный счетчик и переключатель, первый информационный вход которого соединен с .выходом первого коммутатора, второй информационный вход подключен к выходу делителя напряжения, выход второго переключателя соединен с информационным вхо 45 дом второго аналого-цифрового преобразователя, выход которого подключен к счетному входу второго реверсивного счетчика, выходы разря" дов которого соединены с второй . группой информационных входов вто 50 рого коммутатора, установочный вход второго реверсивного счетчика соединен с выходом третьего одновибрвтора, единичный выход первого триггера подключен к управляющим входам реверса второго переключателя и второго реверсивного счетчика уйравляющий вход запуска второго...
Устройство для оценки отношения корреляционных моментов второго и первого порядков

Номер патента: 1244678
Опубликовано: 15.07.1986
МПК: G06G 7/19
Метки: второго, корреляционных, моментов, отношения, оценки, первого, порядков
...процессов х.) и у1 с 1 1,К - -Т1с 1 ь 1 ь- ЮОгде р - ноРмиРованная взаимокор.реляционная функция процессов.Целью изобретения является повышение точности устройства,Параметр К является самостоятельной характеристикой форм взаимокорреляционной функции р) . Кроме того,если у с) . -) и ) х с - и) йи, т . е . ее.оляется выходом линейного звена с импульсной характеристикой Ь(о), топодставляя, производя замену перемен.ных, можно показать, чтоМг Ь) Мо(Ь) Мг(х)К = +ЖМ,(Ь) ЙО) М,(х)где М (Ь) = и"Ь(ц)йгг, - моменты имипульсной характеристики;1;:М(х) =1К (т)ДФ - момент корре)оляционной функции Квходного проацесса х,Таким образом, имеется воэможностьоценивать параметр линейного звена,что весьма важно при диагностике, ресурсных испытаниях,...
Устройство для вычисления начальных моментов

Номер патента: 935971
Опубликовано: 15.06.1982
Авторы: Корчагин, Кравцов, Лакийчук, Мартыненко, Садомов, Хохлов
МПК: G06F 17/18
Метки: вычисления, моментов, начальных
...ординаты Хслучайногопроцесса), точность при этомнаименьшая, но быстродействие устройства (скорость обработки ординат случайного процесса) - наибольшее. ПриХ 2( 1 - целое положительное число)вводимая ордината случайного процессакодируется 2 И раз, в интегратор 7 1заносится таким образом 2 значений(м 3 ксимальная) частота исследуемогослучайного процесса) Х (т ) должна бытьниже по крайней мере в Х раз. В то же 20время точностные характеристики возрастают приблизительно в У раз. В случае Х2 после вычисления значенияХ и последнее заносится в интегратор7, и счетчик 17 своим сигналом перепол пения заносит по счетному входу счетчика 18 код "1" и, если занесенное врегистр 19 и переписанное в счетчик18 в дополнительном коде значениеМ 1, то...
Предыдущий патент: Устройство для учета листовых перемещающихся изделий и управления разделочным агрегатом
Следующий патент: Способ контроля временных параметров электромагнитного реле с переключающей контактной группой
Случайный патент: Приспособление к трамвайным вагонам для предохранения от попадания под колеса вагонов встречных предметов