Стенд для испытания роботов-манипуляторов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1171308
Авторы: Ефимов, Натбиладзе, Хоперия

Текст
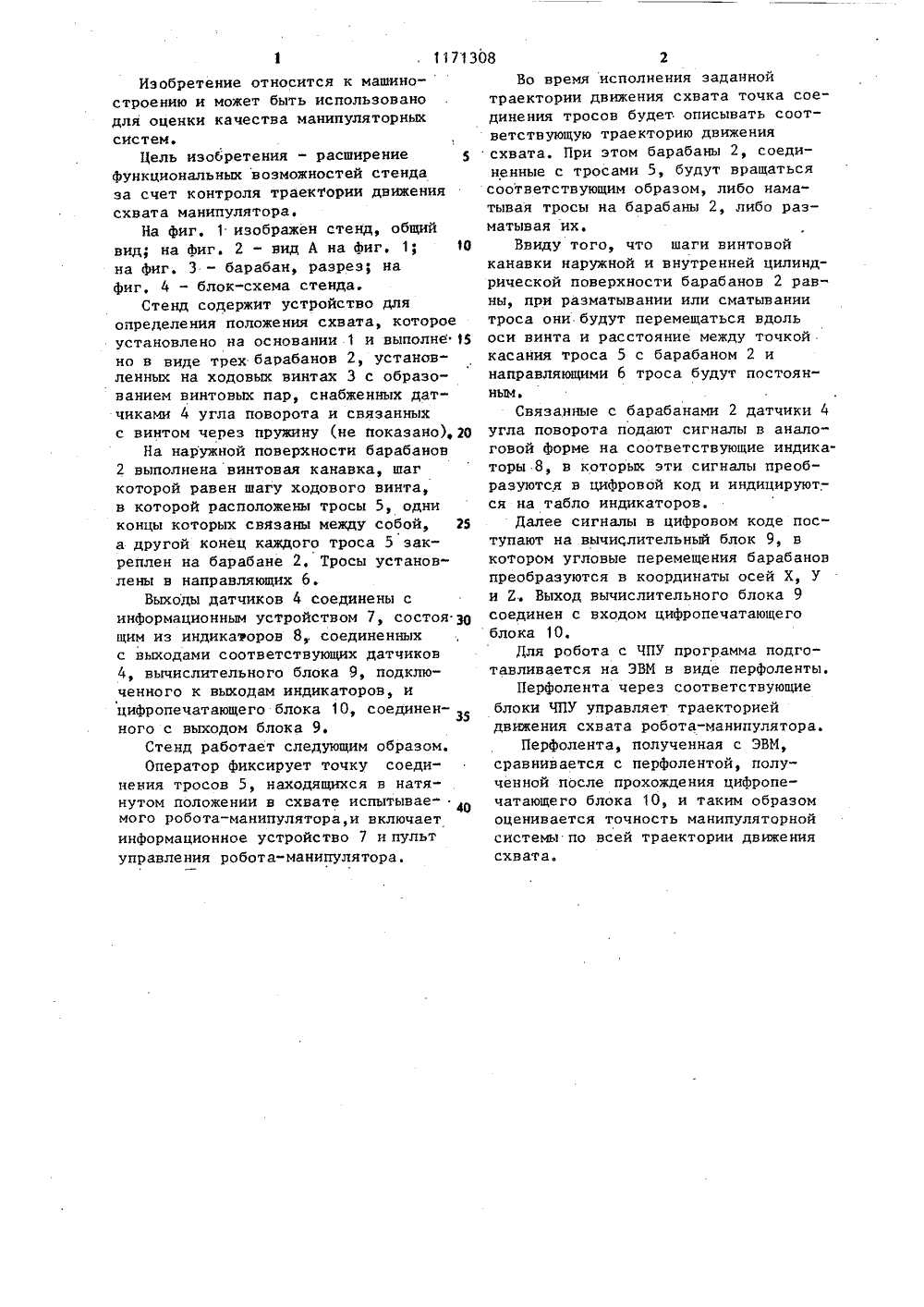
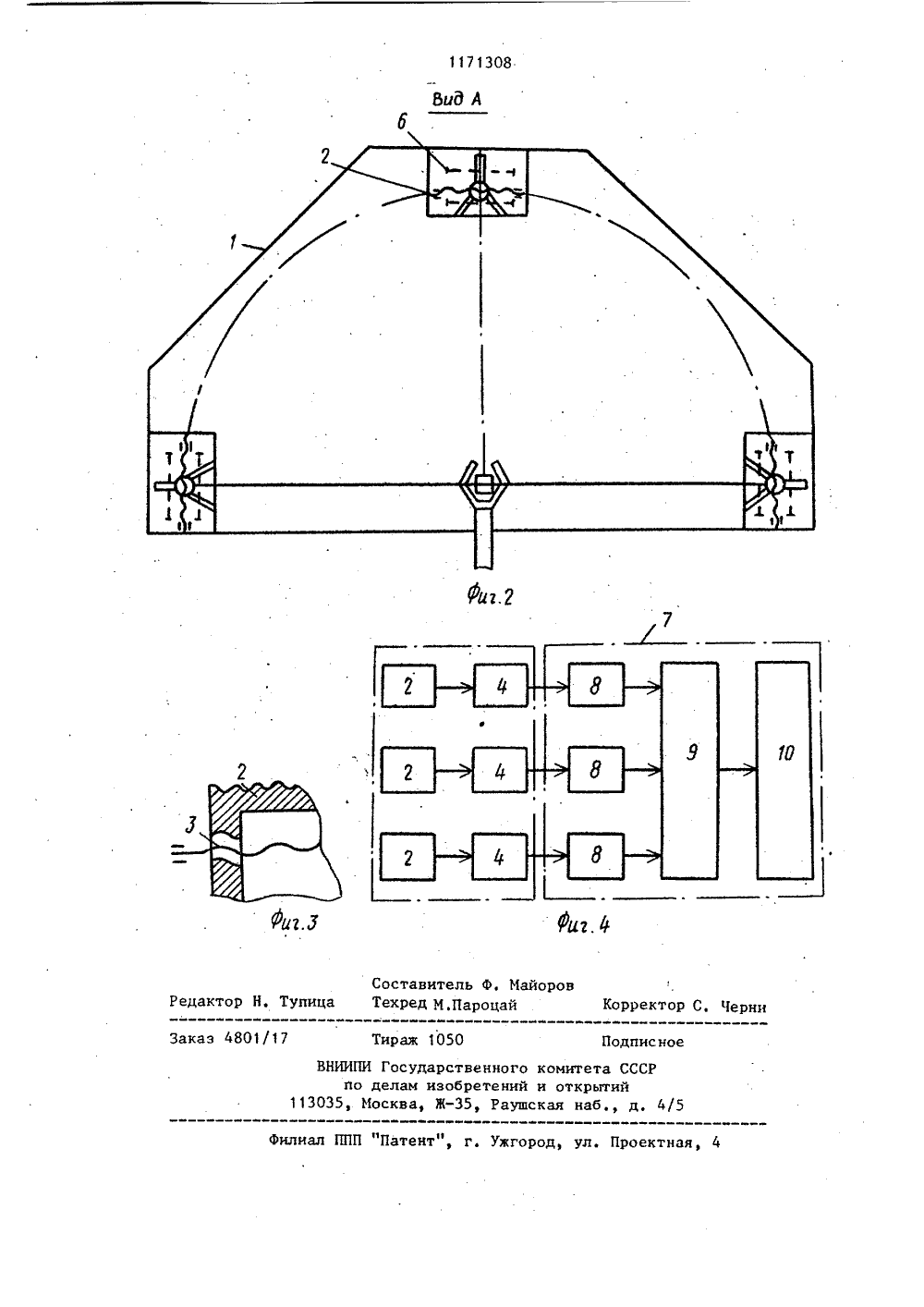
(22) (46) (72) О.Ю. (71) орде ез поли (53) (56) К 9 10. ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ 3727394/25-0802,02.8407.08.85. Бюл. Иф 29ВЛ,Натбиладзе, А,Г.Холеринфимов и Н.В.НатбиладзеГрузинский ордена Ленина иа Трудового Красного Знаменехнический институт62-229.72(088.8)Авторское свидетельство СССР9704, кл. В 25 Л 11/00, 1982(54) (57) 1. СТЕНД ДЛЯ ИСПЫТАНИЯРОБОТОВ-МАНИПУЛЯТОРОВ, содержащийустройство для определения положениясхвата манипулятора и информационноеустройство, о т л и ч а ю щ и й с ятем, что, с целью расширения функциональных возможностей за счет контроля траектории движения схватаманипулятора, устройство для определения положения схвата выполнено в виде трех тросов и трех барабанов, установленных на ходовых винтах чер пружины с образованием винтовых пар и снабженных датчиками угла поворота при этом на наружной поверхности каждого барабана выполнена винтовая ка навка,шаг которой равен шагу ходового винта, одни концы тросов связаны между собой,а другой конец каждого троса закреплен на барабане, кроме того, выходы датчиков угла поворота соединены с информационным устройством.2, Стенд по и. 1, отличающ и й с я тем, что информационное устройство выполнено в виде индикаторов, вход каждого из которых соеди нен с выходом соответствующего датчи ка угла поворота, вычислительного блока, выходы которого соединены с выходами индикаторов, и цифропечатаю щего блока, подключенного к выходу вычислительного блока.1171308 Изобретение относится к машиностроению и может быть использованодля оценки качества манипуляторныхсистем.Цель изобретения - расширениеФункциональных возможностей стендаза счет контроля траектории движениясхвата манипулятора.На фиг. 1 изображен стенд, общийвид; на фиг. 2 - вид А на Фиг. 1; 10на фиг. 3 - барабан, разрез; нафиг. 4 - блок-схема стенда.Стенд содержит устройство дляопределения положения схвата, котороеустановлено на основании.1 и выполне 15но в виде трех барабанов 2, установленных на ходовых винтах 3 с образо"ванием винтовых пар, снабженных датчиками 4 угла поворота и связанныхс винтом через пружину (не показано), 20На наружной поверхности барабанов2 выполнена винтовая канавка, шагкоторой равен шагу ходового винта,в которой расположены тросы 5, одниконцы которых связаны между собой, 2а другой конец каждого троса 5 закреплен на барабане 2, Тросы установлены в направляющих б.Выходы датчиков 4 соединены синформационным устройством 7, состоя ущим из индикаторов 8 соединенныхс выходами соответствующих датчиков4, вычислительного блока 9, подключенного к выходам индикаторов, ицифропечатающего блока 10, соединенного с выходом блока 9.Стенд работает следующим образом.Оператор фиксирует точку соединения тросов 5, находящихся в катя"нутом положении в схвате испытывае" 40мого робота-манипулятора,и включаетинформационное устройство 7 и пультуправления робота-манипулятора,2Во время исполнения заданнойтраектории движения схвата точка соединения тросов будет. описывать соответствующую траекторию движениясхвата. При этом барабаны 2, соединенные с тросами 5, будут вращатьсясоответствующим образом, либо наматывая тросы на барабаны 2, либо разматывая их,Ввиду того, что шаги винтовойканавки наружной и внутренней цилиндрической поверхности барабанов 2 равны, при разматывании или сматываниитроса они будут перемещаться вдольоси винта и расстояние между точкойкасания троса 5 с барабаном 2 инаправляющими б троса будут постоянным.Связанные с барабанами 2 датчики 4угла поворота подают сигналы в аналоговой Форме на соответствующие индикаторы 8, в которых эти сигналы преобразуются в цифровой код и индицируются на табло индикаторов,Далее сигналы в цифровом коде поступают на вычиСлительный блок 9, вкотором угловые перемещения барабановпреобразуются в координаты осей Х, Уи Е. Выход вычислительного блока 9соединен с входом цифропечатающегоблока 10.Для робота с ЧПУ программа подготавливается на ЗВИ в виде перфоленты.Перфолента через соответствующиеблоки ЧПУ управляет траекториейдвижения схвата робота-манипулятора.Перфолента, полученная с ЭВИ,сравнивается с перфолентой, полученной после прохождения цифропечатающего блока 10, и таким образомоценивается точность манипуляторнойсистемы по всей траектории движениясхвата.1171308 бид А Фиг Составитель Ф. МайорТехред М.Пароцай ректор С. Черн едакто пиц 0 Заказ 4801 1 Подписно П "Патент", г. Ужгород, ул. Проектная ВНИИПИ Государстве по делам изобре3035, Москва, Ж,ого комитета СССний и открытийаушская наб., д.
СмотретьЗаявка
3727394, 02.02.1984
ГРУЗИНСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
НАТБИЛАДЗЕ ВАХТАНГ ШАЛВОВИЧ, ХОПЕРИЯ АВТАНДИЛ ГРИГОРЬЕВИЧ, ЕФИМОВ ОЛЕГ ЮРЬЕВИЧ, НАТБИЛАДЗЕ НАТИЯ ВАХТАНГОВНА
МПК / Метки
МПК: B25J 11/00
Метки: испытания, роботов-манипуляторов, стенд
Опубликовано: 07.08.1985
Код ссылки
<a href="https://patents.su/3-1171308-stend-dlya-ispytaniya-robotov-manipulyatorov.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытания роботов-манипуляторов</a>
Преобразователь угла наклона (поворота) объекта в код

Номер патента: 711367
Опубликовано: 25.01.1980
Авторы: Костюков, Тырса, Федотов
МПК: G01C 9/06
Метки: код, наклона, объекта, поворота, угла
...стабильности кольце - вой развертки, напряжения ее обеспечивающие, синхронизируют в блоке питания 2 импульсами генератора 3,прошедшими через делитель 4. Каждомуимпульсу, снимаемому с делителя 4,соответствует строго определеннаяточка на экране ЭЛТ 1, которая впространстве может перемещаться только при перемещении ЭЛТ, а значит и исследуемого объекта. Таким образом импульс с делителя 4 характеризует угловое положение объекта (обеспечивает пространственно.-временную связь) Световой поток от люминофора в процессе кольцевой развертки проходит через датчик угла наклона 5 на фото- приемник б, в результате чего на Выходе фотоприемника б и формирователя 8 появляются сигналы, единичный уровень которых соответствует, например, прохождению луча...
Многоканальный преобразователь угла поворота вала в код

Номер патента: 1211888
Опубликовано: 15.02.1986
МПК: H03M 1/60
Метки: вала, код, многоканальный, поворота, угла
...прямоугольные напряжения синусногои косинусного каналов преобразователясоответственно. Это напряжение поступает на Э-входы регистра 17 квадрантов, т,е. на В -входах регистра17 квадрантов Формируется двухразрядный код, определяемый соотношением полярностей напряжений синусной и косинусной обмоток датчиков 1 соответственно. В формирователе 23 прямоугольного напряжения и формирователе 21импульсов напряжение гитания сетипреобразуется в прямоугольное напряжение и импульсы по переднему и заднемуфронтам этого напряжения соответственно, Эти импульсы подаются на Г -вхо-.ды регистра 17 квадрантов. Таким образом, с приходом импульса, соответствующего переходу через нуль напряжения питания сети в регистр 17квадрантов, производится запись кода...
Стенд для испытания манипуляторов, смонтированных на транспортных средствах

Номер патента: 1305026
Опубликовано: 23.04.1987
Авторы: Баловнев, Ермилов, Моисеев, Николай, Разумов, Савельев
МПК: B25J 11/00
Метки: испытания, манипуляторов, смонтированных, средствах, стенд, транспортных
...основании с возможностью перемещения вдоль своей .оси, вращения вокруг этой оси, и подпружинен в осевом направлении, а демпферы одним концом шарнирно связаны с валом 14, а другим, соответственно, с основанием 1 и подвижной платформой 2. 1 з.п. ф-лы, 3 ил. гмощи регулировочных гаек 24 смонтированы пластины 25 и 26 (фиг.З). На шпильках с возможностью осевого перемещения смонтирована траверса 27 со штоком 28, Между траверсой 27 и пластинами 25 и 26 с обеих сторон установлены упругие элементы 29. Шток 28 снабжен шарниром 30 крепления, а другой шарнир 31 крепления смонтирован на противоположной упорной пластине 26,Стенд работает следующим образом.Перед началом испытания оператор задает при помощи регулируемых демпферов 18-20 и пружины 15...
Преобразователь угла поворота вала в код

Номер патента: 1716604
Опубликовано: 28.02.1992
Автор: Николенко
МПК: H03M 1/64
Метки: вала, код, поворота, угла
...каэлементовзздержки 17 обнуляютсчетчикфронтам следующих импульсов с выхода 7. Таким образом, на выходе регистра 8нуль-компараторов 2 и 3 начинают работу сформировался параллельный выходнойраспределители импульсов 13 и 14, которые 45 код, пропорциональный углу а поворота ромогут быть выполнены в виде обычных сдви- тора фазовращателя 1,говых регистров, Они формируют на выходе Следует отметить, что длительностьраспределенные во времени импульсы, Эти стробирующих импульсов сстр (фиг. 2) опрераспределители по передним фронтам им- деляется частотой сигнала б с выхода делипульсов с выхода элементов И 11 и 12 фор теля частоты и взаимным временыммиру ют сдвинутые во времени импульсы в и расположением сигналов в и г с выхода расг(фиг. 2),...
Муфта для соединения валов с установкой заданного угла относительного поворота

Номер патента: 222070
Опубликовано: 01.01.1968
Авторы: Адамович, Рабинович, Широков
МПК: F16D 3/18
Метки: валов, заданного, муфта, относительного, поворота, соединения, угла, установкой
...з зубчат числом з атой вт юших ва для соединения валов, собчатых втулок с наруждвух зубчатых обойм с нием, причем втулка н попарно, соединительных 5 ведомого.обенностью предложенной что, с целью достижения шности заданного относи- ения валов, обоймы и 10 олнены с различным чисально с разницей в один та состоитвтулки 2, сы 3 и зубчЕ соединя Предмет и ретения Муфта для соединения заданного угла относите стоящая из двух зубчат ним зацеплением и двух наружным зацеплением, что, с целью достижени грешности заданного отн жения валов, обоймы и полнены с различным ч мально с разницей в один Такая конструкция муфты обеспечит необходимую точность соединения валов и позво лит снизить стоимость оборудования.На чертеже представлена описываемая...
Предыдущий патент: Манипулятор
Следующий патент: Кисть исполнительного органа манипулятора
Случайный патент: Устройство для синхронизации импульсов