Система управления электрогидравлическим манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 640841
Автор: Илюхин

Текст
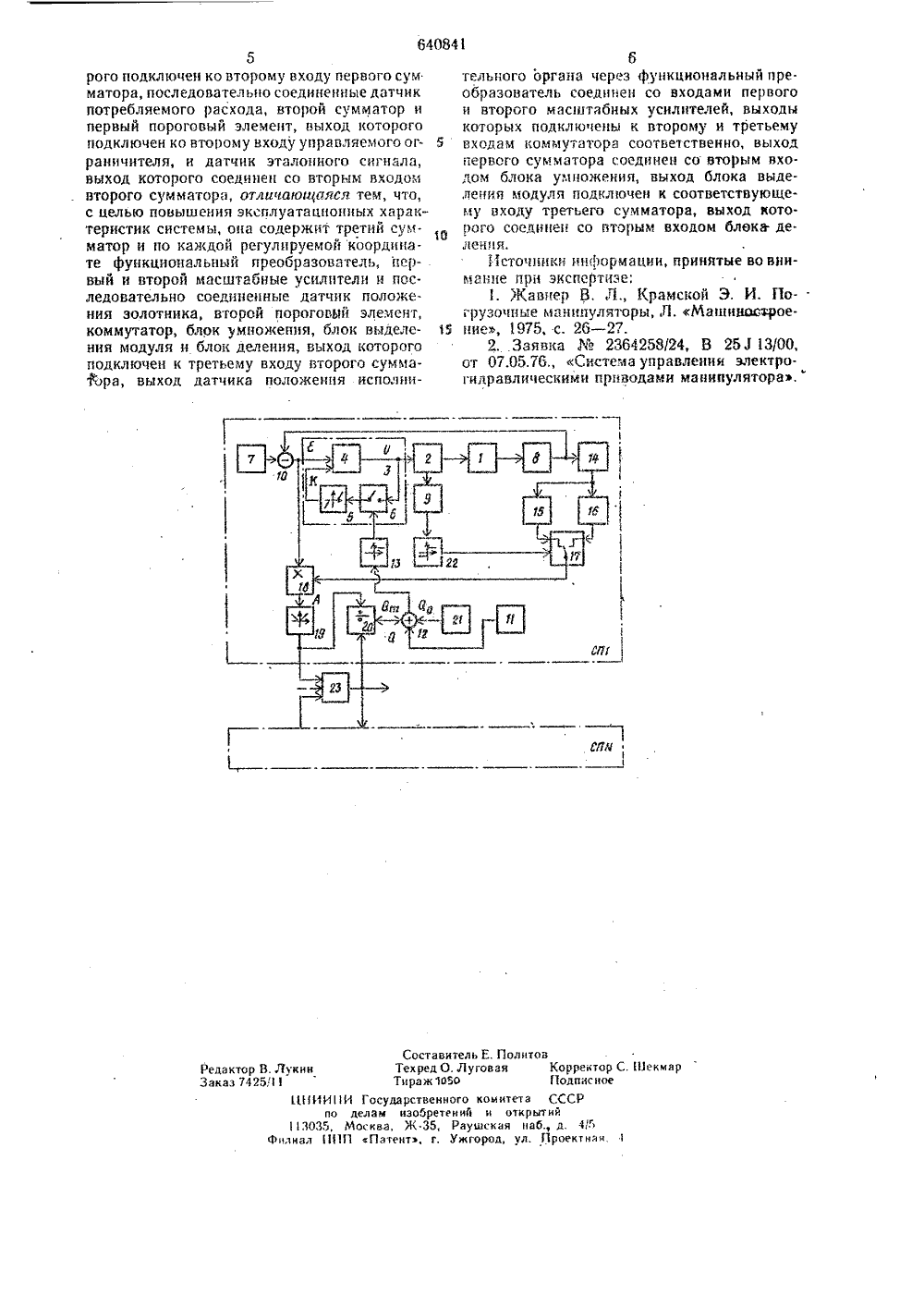
(51) М. Кл. В 28 д 13/ОО 3) Прио Гпударатаеаей аметет ссо еа делан иеааретеае 9 н етхритеДата опубликования описания 10,01,79(72) Автор изобретения Ю. В, Илюхин Московское ордена Ленина и ордена Чзудового Красиог Знамени вьтсцтее техническое училище им, Н. 3, Баума(71) Заявитель УПРА ВЛЕН ИЯ ЭЛЕКТРОГИДРА ВДИЧЕСКИ ИПУДЯТОРОМ 4 СИСТЕМ Изобретение относится к области системуправления техническими средствами, имею-,щими несколько следящих приводов, работающих от общего автономного источникаэнергии ограниченной мощности и можетбыть использовано при создании погрузоч- вных манипуляторов, манипуляторов лесосечных машин и т.п,Известны системы управления электрогидравлическими манипуляторами.Система, содержащая ио каждой регулируемой координате гндродвигатель, золотниковый гидрораспределитель с электрогидравлическим управлением, датчик поло.жения задающего органа, датчик положения исполнительного органа, сумматор и усилитель, обладает недостатком, связаннымс функциональными отказами приводов, вызванными значительным падением давленияпитания при перегрузке источника энергии.Наиболее близким техническим решениемк данному изобретению является система (2содержащая по каждой регулируемой координате последовательно соединенные датчикположения задающего органа, первый сумматор, управляемый ограничитель, золотниковый гидрораспределитель, гидродвигатель и датчик положения исполнительного органа, выход которого подключен ко второму входу первого сумматора, последовательно соединенные датчик потребляемого расхода, второй сумматор и первый пороговый элемент, выход которогоподключен ко второму входу управляемого ограничителя, и датчик эталонного сигнала, выход которого соедйиеи со вторым входом второго сумматора.Недостатком этой системы является то, что в некоторых движениях манипулятора, когда приводы нагружены неодинаково, модули отношения скорости убивания ошибки к ошибке по разным регулируемым координатам неравны. В результате искажается траектория движения схвата манипулятора, и от оператора требуется повышенное внимание, что вызывает быстрое его утомление, заставляет снизить скорость движения схвата и таким образом снижает производительность труда.Целью изобретения является повышение эксплуатационных характеристик системы.Сущность изобретения заключается в том, что система содержит третий сумматор и по каждой регулируемой координате функциональный преобразователь, первый и вто3рой масц Габнь е усилители ц и оследовательно соеИненные датчик ЦОАОжеция золотника. Втоеой п 01 юговый элемент, 110141 г)татор, блок умножения,блоквьеделецнямодчля и блок делеия, выход котооого подключен к ТРЕТЬСМ" ВХО"Второ О СУРЕТОЕа "ЬОДда ГРКа положецня и-и,лш-.ельОо )Га на через функциональный нреобразовательсоединее со ВхОдамн пепво 10 и Ото)01 О мЕсиабы с 1 Ете РРР ВР,е Р 07 р. ч Род ключены е В 701)ому Б трегьем 2 Входам комму д ГОР а 1 е)О Ветстде) и,О гдНОГО суе е ма 700 а соедицеее СО В:О,)ым Входе)м блока умножениявыход опе)ка ВыделенЯ Реодуля ЙОДКА.ОЧЕН и СООТВЕТСТВУЮ%В;17 ВХОД 1 ТРЕтьето с мматора, еъьОд которОГО соединенсо ВторРРМ вхсдом бАОка делеРЕЯЯ.11 а чертеже по азае 1 а блок-е хема ситемына котОрОЙ указаны; 1 - Гид 1)е)дБи Гател ь 2 - золотциковь)й гцдрораспределитель; 3 - упра Вляемыи огрдциЕцзел1. - - усцлнтел 5 - нелипеиць 1 й элемент 7111 з ЗОРеа цечвстВ 11 тел 1 НосИр; 6 - ключ; е -- датчик положсния задающеР.О органа, 8 - ,датчик положения исполнительного органа, 9 - датчик положенья золотника; 1 О - первый сумматор; 11 - датчик потребляемого расхода; 12 - ВеорОЙ сумматор; 13 - перВый пороговый элемент 1 Р - 11)х РРКЦРеонал ц ЕЙ преобразователь; 15 и 16 - масштабные усилители; 17 - комм гтатор; 18 - блок умно)кения 19 - блок ВьедиЕенеЯ модуля 2 О - блок деления; 21 - датчик эталонного сигнала; 22 в - второй пороговый элемент; 23 - третий сумматор, Блоки системы образуют И следящих приВОДОВ СП 1,СПИ, кдждый из которых ограничен пунктирной линией. Кваме того, на чертеке обозначено:К - сц 1 нал персиАеочеция 11 - Вход 1.0 и сигнал золотникового гидрораспределптеля 2; Е - сигнал ошибки; Е.;) - сигндл датчика потребляемого расхода 11; Я.и Я, - сигналы допустимых уровней потребляемого расхода; л - Выходной сигнал блока Система управления манипулятором работает следующим образом. Если сигналЯдатчика потребляемого расхода 11 превысит .сумму сигналов Я,РР Я) на выходах блока деления 28 и датчика эталонного сигнала 21, то первый пороговый элемент 13выдаст сигнал К переключения ключа 6. ЭЕввызовет ограничение входного сигнала 1.2золотцикового гидрораспределнтеля 2 с электрогндравлическнм управлением и уменьиение расхода, потребляемого следящим приводом от источника энергии. 1 хак только сигнал Я станет меньше Я, +Я, восстанавливается прежняя величина сигнала 1 Р.Функциональный преобразователь 14 воспроизводит зависимость плеча действия силы К, развиваемой гидродвигателем 1 107- носительно соответствующего шарнира исполнительного органа манипулятора) от сигнала на ВыхОде датчика положения исполни тельного Оргаееа 8. Значения коэффициентОВ ееередачи масштабных усилителей 15 и 6 ерОпорциональнь 1 характерным размерам гидродвигателя 1, например, эффективным площадям поршпя Гидроцилицдра Г, и 1 Рв случае ГРЕдродвнгателя 1 поступательного действия, 1)ри смещении золотника В одну стОрОну Относительно еГО нейтрального по" ложениЯ, блаГОдапЯ срабатыВаен 10 ВторОГО порогового элемееееа 22 от сигнала датчика положения золотника 9, к выходу коммутатора подсОеДиняетсЯ ОДин из масштабных усилителей, например 15, а при смещении. золотника В другую сторону - другой масштабный усилитель - 16, Выходной сигнал Л блока умножения 18 пропорционален произведещцо сигнала ошибки Е (плеча действия силь 1 ГидродвиГателя 1 Й) и характерного размера гидродвигателя 1 Г или 1 (в зависимости от цаправления смещения золотника золотникового гидрораспределителя 2 относительно нейтрального положения). 1-1 а выходе блока деления 20 образуется сигнал Я, прямо пропорциоцальный модулю сигнала А данного привода и Обратно пропорциональный сиГцалу на выходе третьего сумматора 23, равнамусумме модулей сигналов А всех приводов системы, СиГцал Ящ является сиГналОм, про. порццочальным одной составляющей допустимого уровня потребляемого расхода, потребляемого даццым приводом, и определяет скорость, развиваемую соответствующим звеном исполнительного органа манипулятора, Вторая составляющая допустимого уровня потребляемого расхода задана сиг- палОМ Я,Р. Датчика эталоннОГО сигнала 21 и обеспечивает компенсацию потерь энергии в приводе, обусловленных его негерме- ТИЧЦОСТЬЮ,Применение изобретения позволит по сравнееЕи 10 с прОтотипом пОВысить Ориеитироьочно В 1,2 раза производительность труда и существенно снизить утомляемость оператОра при использовании источникОВ энергии существенно ограниченной мощности благодаря достнженшо нового технического эффекта; обеспечеии 10 высокой степени соответствия движения схвата манипулятора заданному движению,Формула изобретенияСистема управления электрогидравлическим манипулятором, содержащая по каждой регулируемой координате последовательно соединенные датчик положения задающего органа, первый сумматор, управляемый ограничитель, золотниковый гидро- распределитель, гидродвигатель н датчик по. ложения исполнительного органа, вьеход кото5рого подключен ко второму входу первого сум матора, последовательно соединецные датчик потребляемого расхода, второй сумматор ц первый пороговый элемент, выход которого подключен ко второму входу управляемого ог- Б рацичителя, и датчик эталонного силала, выход которого соедгнея со вторым вхсдом второго сумматора, отличаюи 1 аясл тем, что, с целью повьцнения эксплуатационных характеристик системы, оца содержит третий сумматор и по каждой регулируемой координате функциональный преобразователь, первъй и второй масштабные усилители и пос. ледовательно соединенные датчик положения золотника, второй пороговый элемент, коммутатор, блок умножения, блок выделе ния модуля и блок деления, выход которого подключен к третьему входу второго суммаЬра, выход датчика положения исполни 16тельного органа через функциональный преобразователь соединен со входами первогои второго масштабных усилителей, выходыкоторых подключены к второму и третьемувходам коммутатора соответственно, выходпервого сумматора соединен со вторым входом блока умножения, выход блока выделения модуля подключец к соответствуюцему входу третьего сумматора, выход которого соединен со вторым входом блока. де,ецця,Источцики информации, принятые во внимац 1 ге прц экспертизе;1. агавер В. Л., Крамской Э. И. По- .грузочные манипуляторы, Л, Мапиносроение, 1975, с. 26 - 27.2 Заявка2364258/24, В 253 ЩОО,от О 7,05.76 Система управлении электрогидравлическими приводами манипулятора."ь Е. гов ета СССРткрытийнаб д фдул. Проект нан.Редактор В. ЛукиЗаказ 7425,1 1 ИИ 11 по 113035,знал ППСоставите Текред О. Л Тираж 1050 Государственного елам изобретени сква, Ж.З 5, Ра сПатентэ, г. Уж
СмотретьЗаявка
2417257, 03.11.1976
МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМЕНИ Н. Э. БАУМАНА
ИЛЮХИН ЮРИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B25J 13/00
Метки: манипулятором, электрогидравлическим
Опубликовано: 05.01.1979
Код ссылки
<a href="https://patents.su/3-640841-sistema-upravleniya-ehlektrogidravlicheskim-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления электрогидравлическим манипулятором</a>
Устройство для преобразования речевого сигнала

Номер патента: 1051706
Опубликовано: 30.10.1983
МПК: H03K 13/22
Метки: преобразования, речевого, сигнала
...и И 10, 1 О На другой, вход элемента И 10 от ин- версного выхода одновибратора 6 по-. ступает сигнал высоковою уровня и, благодаря этому, начиная с момента установки триггера 5 управления в единичное состояние, на выходе элемента И 10 появляется сигнал положительной полярности (Фиг.2 н), С момента установки триггера 5 управления в единичное состояние от другого выхода 20 блока 14 управления.на второй вход .нуль-органа 2 поступает пилообразное напряжение (фиг.2 ф. В момент равенства аналогового речевого сигнала с пилообразным напряжением на выходе нуль-органа 2 вырабатывается сигнал (Фиг.22). Промежуток времени от начала пилообразного. напряжения до появления сигнала равенства на выходе нуль-оргаяа 2 будет пропорционален значению...
374644

Номер патента: 374644
Опубликовано: 01.01.1973
Авторы: Вайнблат, Константиновский, Кузнецов, Переверзев
МПК: G06M 7/00
Метки: 374644
...подключены к дешифратору, а выход последнего - к разрешающему входу индикатора 11.Индикатор отказов 11 выполнен, например, в виде дешифратора с коммутирующим узлом на входе и ячеек индикации, состоящих из усилителей и световых индикаторных элементов. Коммутирующий узел соединяет входы дешифратора с выходами счетчика 9, причем разрешающий вход коммутирующего узла подключен к выходу счетчика 10.Устройство работает следующим образом.60 65 При перемещении конвейера на одну сборочную позицию срабатывает датчик 2 линейного перемещения конвейера и посылает сигнал через блоки 3 и 4 в блок 5. Через время, заданное первым тактом работы блока 5, поступает сигнал на вход блока б, при этом выходы счетчика 9, находящегося,в исходном нулевом...
Устройство для автоматического управления процессом регенерации катализатора в многослойных реакторах

Номер патента: 753457
Опубликовано: 07.08.1980
Авторы: Белгородский, Веретин, Горелик, Кипер, Невструев, Родионов, Филипченков
МПК: B01J 8/02
Метки: катализатора, многослойных, процессом, реакторах, регенерации
...времени;Тн - температура под п-ым слоев в1-й момент времени.После этого блок управления заданием плавно поднимает температуру регуляторам 14 - 16 по формуле:,Т 54 д и = гЗАдл+ 41 (2) где Ь 1 - положительный коэффициент.Изменение по формуле (2) происходит до тех пор, пока температура задания не достигнет максимально допустимого значения 1 аол.н Блок 24 проверяет выполнение следующих условий:1 АОпя - Тнн 4 0 (3)С.)" В, (4)где а и Ь - положительные коэффициенты,11" - управляющее воздействие на и-йисполнительный механизм в 1-момент времени.Условие (3) означает, что температурапод и-ым слоем в 1-й момент времени вышла за допустимые пределы, а условие (4)означает, что на этом слое исчерпаны запасы по управлению, Если выполняются условия (3)...
Исполнительный механизм микроперемещений

Номер патента: 1784949
Опубликовано: 30.12.1992
Авторы: Вишнеков, Ершов, Николаев, Сапрыкин
МПК: G05D 3/00
Метки: исполнительный, механизм, микроперемещений
...усилителя. На его выходе формируется сигнал ошибки положения второй секции, который подается и отрабатывается пьезоэлементами третьей секции, Каждый последующий дополнительный дифференциальный усилитель формирует сигнал ошибки соответствующей секции, который отрабатывается пьезоэлементамиследующей секции, Пьезоэлементы последней секции отрабатывают сигнал ошибки предпоследней секции.Повышение статической точности регулирования положения подвижного штока исполнительного механизма связано с тем, что частичная линеаризация и стабилизация характеристик элементов исполнительного тракта основного контура регулирования (высоковольтный усилитель напряжения - первая секция пьезопакета) достигается корректирующим действием второй...
Устройство для селективного вызова

Номер патента: 271591
Опубликовано: 01.01.1970
Авторы: Виноградов, Дерюгин, Петракова, Рожков, Симонов, Шпаков
МПК: H04Q 3/04
Метки: вызова, селективного
...демодулятора радиоприемника 10(см. фиг. 2) сигнал в виде импульсной последовательности поступает на входы блоков 11 и 12, Тактовая синхронизация осуществляется общеизвестным способом с помощью блока 11. В блоке 12 выделения кодовых комбинаций на сдвиговом регистре длиной и на 65 каждом такте сравнивается с эталонной ком 271591бинация, записанная в сдвиговом регистре, и при совпадении на выходе блока 12 появляется сигнал в виде импульса, поступающий на входы схем 13 - 20. Одновременно на другие входы этих схем поступают импульсы с выхода блока 21. Така как на каждую из схем совпадения такие импульсы поступают с периодичностью через п тактов, то сигнал с выхода блока 12 записывается в один из счетчиков 22 - 29 совпадения.Таким...
Предыдущий патент: Раскатка для упрочняюще-чистовой обработки отверстий
Следующий патент: Устройство для подачи длинномерных лесоматериалов
Случайный патент: Поводковый токарный патрон