B25J — Манипуляторы; камеры, оборудованные манипуляторами
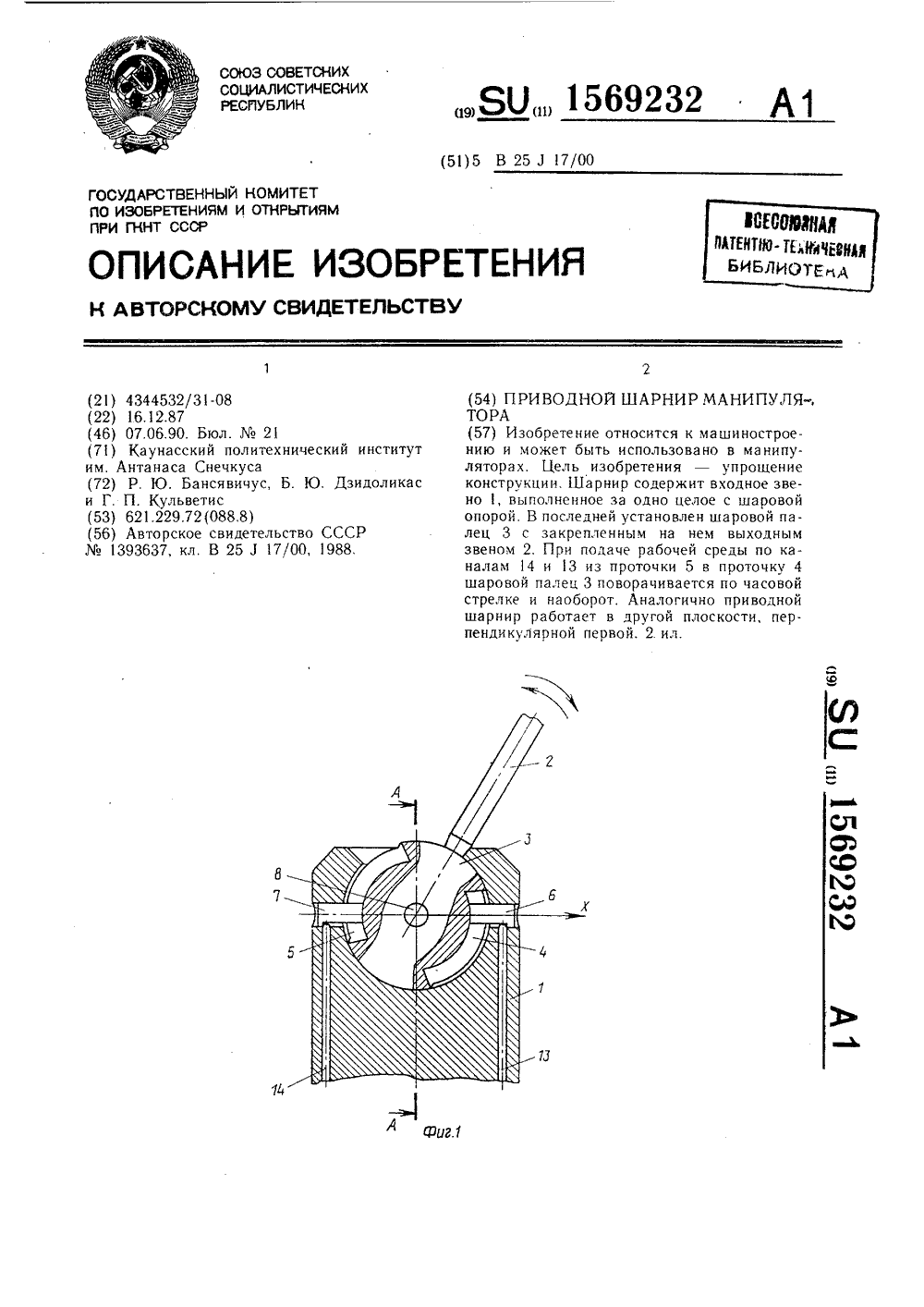
Приводной шарнир манипулятора
Номер патента: 1569232
Опубликовано: 07.06.1990
Авторы: Бансявичюс, Дзидоликас, Кульветис
МПК: B25J 17/00
Метки: манипулятора, приводной, шарнир
...с шаровой опорой, выходное звено 2 и шаровой палец 3. В нем образованы проточки 4 и 5, которые разделяются цилиндрическими лопатками 6 и 7, закрепленными на корпусе входного звена 1. Проточки 4 и 5 и лопатки 6 и 7 образуют герметичные полости. Цилиндрические лопатки 8 и 9 закреплены на шаровом пальце 3 и разделяют полости 10 и 11. Они выполнены в сферической поверхности входного звена 1, которое имеет сьемную верхнюю часть 12, являющуюся продолжением шаровой опоры. Каналы 13 - 16, выполненные в корпусе входного звена 1, служат для подачи рабочей среды. Приводной шарнир манипулятора работает следующим образом.Поворот шарового пальца 3 вместе с выходным звеном 2 вокруг оси У по часовой Редактор О. ЮрковецкаяЗаказ 1420ВНИИПИ...
Очувствленный кистевой сустав робота

Номер патента: 1569233
Опубликовано: 07.06.1990
Авторы: Запускалов, Ксензенко
МПК: B25J 19/00
Метки: кистевой, очувствленный, робота, сустав
...оси Х и У декартовой системы координат УХУ, при этом тензорезисторы, лежашие на одноименной стороне пластин 11 (фиг, 3), включены в противопокожные плечи мостов (фиг. 4 и 5). В измерительные мосты (фкг. 7 и 8) включены тензорезисторы 12, 13, 24, 25 к 21., 23, 33, 34 соответственно, преобразующие деформацию пластин 10 в электрические сигналы от крутящих моментов М и Мх, действуюшкх относительно осей У и Х, при этом тензорезисторы, лежащие на разноименных сторонах пластин 10 (фиг. 3), включены в противоположные плечи мостов (фиг. 7 и 8). В измерительные мосты (фиг. 6 и 9) включены тензорезисторы 14, 22, 26, 35 и6, 19, 29, 32 соответственно, преобразующие деформацию пластин 10 и 11 в электрические сигналы от силы Р, и крутящего момента Ч...
Резонансный привод промышленного робота

Номер патента: 1570892
Опубликовано: 15.06.1990
Автор: Кривовяз
МПК: B25J 9/00
Метки: привод, промышленного, резонансный, робота
...Я-го цикла), то перестановка их в заданное положение осуществляется следуюцим образом. По мере разгона потенциальная энергия аккумуляторов 5 переходит в кинетическую энергию тележки 2, следовательно, силы, с которыми они воздействуют на платформы 6, уменьшаются. В момент времени, когда эти силы равны нулю, что определяется, например, при помощи датчиков 13 деформации (растяжения - сжатия), установленных между аккумуляторами 5 и платформами 6, по команде от блока 12 подается напряжение питания па один (если х;)Х и у)1 ) или оба (если х;)Хц и у;) У ) электромагнитных тормозаО, которые через реечные передачи 9 разблокируют платформы 6 с фиксаторами 7. Тележка 2, имеющая запас кинетической энергии, через аккумуляторы 5 приводит в движение...
Захват промышленного робота

Номер патента: 1570893
Опубликовано: 15.06.1990
МПК: B25J 15/00
Метки: захват, промышленного, робота
...расположены по разные стороны пористой диафрагмы 3 и подключены к источнику питания. Электроды 5 также расположены по разные стороны пористой диафрагмы 3 и подключены к измерительному прибору, сигналы с которого идут в систему управления промышленным роботом. Пальцы 2 имеют эластичные стенки, выполненные в виде мембран 6.Устройство работает следующим образом.После позиционирования захвата на электроды 4 подается постоянное напряжение У и, вследствие эффекта электроотсоса начинается перетекание жидкости через пористую диафрагму 3 в ту часть полого пальца 2, на которой установлена мембра 4на 6. Мембраны 6 растягиваются, захватывая деталь 7. Для открепления детали 7 на электроды 4 подается постоянное напряжение обратной полярности....
Схват

Номер патента: 1570894
Опубликовано: 15.06.1990
Авторы: Ковтун, Колесников, Пятин
МПК: B25J 15/00, B25J 15/06
Метки: схват
...фиг. 1 изображен предлагаемый схват, общий вид; на фиг. 2 - разрез А-А на фиг. 1.Схват содержит корпус 1, в котором расположены обойма 2 с подпружиненными пальцами 3 и центральным отверстием, установленная с возможностью вращения относительно продольной оси корпуса, и механизм разворота обоймы 2, выполненный в виде магнитной системы. Внутри корпуса 1 размещены неподвижная, а на обойме 2 - подвижная части магнитной системы, состоящей из нескольких пар постоянных магнитов 4 и 5. Соосно обойме 2 размещен подпружиненный сердечник 6 электромагнита 7 удержания заготовки 8. Схват работает в паре с кольцом 9, установленным на токарном патроне и не относящимся к конструкции схвата.Схват работает следующим образом.К патрону станка,...
Вакуумный захват

Номер патента: 1570895
Опубликовано: 15.06.1990
Авторы: Абаринов, Вешников, Градецкий, Зиновьев
МПК: B25J 15/06
...комбинат Патент, г. Ужгород, ул. Гагарина,01 3Изобретение относится к машиностроению и может быть использовано при конструировании манипуляторов.Целью изобретения является повышение надежности работы. На чертеже изображено предлагаемоеустройство. Вакуумный захват содержит корпус 1, на рабочем торце которого выполнен кольцевой выступ. На кольцевом выступе закреплена эластичная присоска 2, полость 3 которой соединена с вакуумной камерой 4 кольцевого эжектора, расположенного в корпусе соосно ему. Выход кольцевого диффузора 5 эжектора расположен на рабочем торце корпусанапротив периферийной части 6 присоски 2 с нерабочей ее стороны, Ось симметрии радиального сечения диффузора 5 параллельна продольной оси корпуса 1. Кольцевое...
Устройство автоматической смены инструментов промышленного робота

Номер патента: 1572404
Опубликовано: 15.06.1990
МПК: B23Q 3/155, B25J 11/00
Метки: автоматической, инструментов, промышленного, робота, смены
...кабеля 55 к одному из электродов сварочного пистолета 27. На плоских концевых частях 52 шины 51 имеются контактные поверхности,покрытые слоем серебра для повышения.эффективности электрического контакта.В то время как шины 51 второй пары жестко закреплены на фланце Вкрепежными винтами 56, шины 46 первой пары К"способны выполнять небольшие установочные перемещения,а тарелочные пружины 57 вложенныемежду шинами 46 и держателем А, обеспечивают заданное контактное усилие(натяг) соответственными частями47 и 52 шин 46 и 51 и более мощноепитание для сварочного пистолета 27.Прижимная пластина 58 и профилированные элементы 59 вставлены междутарельчатыми пружинами 57 и шинами, 46 соответственно, чтобы эти шинымогли совершать небольшие...
Резонансный манипулятор

Номер патента: 1572801
Опубликовано: 23.06.1990
Авторы: Политов, Серов, Чернов
МПК: B25J 9/00
Метки: манипулятор, резонансный
...М у штоком 6 и цилиндром 2 установ О л н упругий элемент (пружина) 8, а к рпус 1 механической руки через шар н р 9. связан с основанием. Кроме того, н гидроцилиндре установлен датчик 10 п ложения штока 6, а на корпусе 1 - 25 д тчик 11 знака скорости перемещения механической руки, при этом шарниры 7 и 9 расположены по оси силовогоиндра и механической руки при нейтральном положении этой руки (точка А).Манипулятор работает следующим образом.Первоначально корпус 1 механичесКой руки находится в положении точКи В и Фиксируется запертой в полости цилиндра 2 жидкостью. При этом 1 ружина 8 растянута, поршень со штоком выдвинут до упора в крышку гидроцилиндра 1, Усилию пружины 8, стре мящийся вернуть корпус 1 в среднее положение (точка А),...
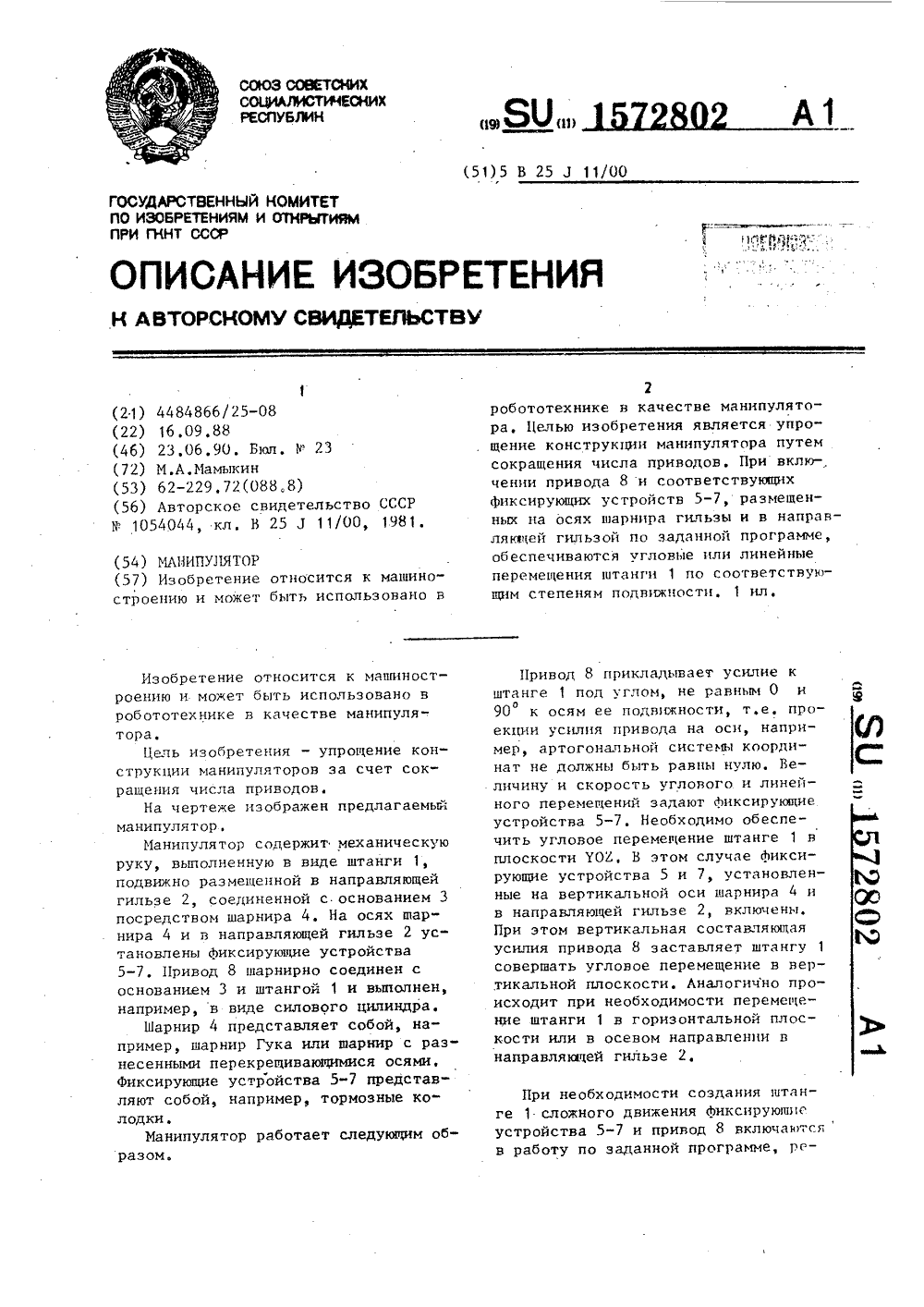
Манипулятор
Номер патента: 1572802
Опубликовано: 23.06.1990
Автор: Мамыкин
МПК: B25J 11/00
Метки: манипулятор
...цилиндра.Шарнир 4 представляет собой, например, шарнир Гука или шарнир с разнесенными перекрещивающимися осями,Фиксирующие устройства 5-7 представляют собой, например, тормозные колодки,Манипулятор работает следующим обр бототехнике в качестве манипулятора, Целью изобретения является упрощение конструкции манипулятора путем сокращения числа приводов. При включении привода 8 и соответствующих Фиксирующих устройств 5-7, размещенных на осях шарнира гильзы и в напра ляющей гильзой по заданной программе обеспечиваются угловые или линейные перемещения штанги 1 по соответствую щим степеням подвижности, 1 ил,екции усилия привода на мер, артогональной систе нат не должны быть равнь личину и скорость углово ного перемещений задают устройства...
Захватная головка

Номер патента: 1572803
Опубликовано: 23.06.1990
Авторы: Мозоров, Чирков, Шарапов
МПК: B25J 15/00
...рычагов 4 установлены захватные губки в виде сферических опор 7 и двух призм 8, На боковой поверхности опор 7 выполнены прямоугольные пазы 9, а в ответных отверстиях ры чагов 4 установлены Фиксаторы-шарики10. Рабочие поверхности 11 призм 8выполнены в виде выпуклых дуг окружности.Захватная головка работает следующим образом.11 ри перемещении шток-рейки 3 вправо рычаги 4 поворачиваются навстречу друг другу и захватные губки Фиксируют деталь 12 рабочими поверхностями 11 призм 8. При этом захватные35губки имеют возможность поворота относительно рычагов 4 вокруг трех взаимно перпендикулярных осей на угол,величина которого ограничивается фиксатором 10, При обратном ходе поршня2 рычаги 4 разводятся и освобождают деталь 12.Формула изобретения1....
Схват манипулятора

Номер патента: 1572804
Опубликовано: 23.06.1990
Авторы: Зинченко, Кодра, Сенишин
МПК: B25J 15/00
Метки: манипулятора, схват
...введенного датчика разности давлений. Составитель М.ИлюковичРедактор О.Головач Техред М.Ходанич Корректор В.Кабаций Заказ 1610 Тираж 694 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ,и. 1 агарпна,101 Изобретение относится к машиноСтроению и может быть использовано вкачестве захватного органа роботаманипулятора.Цель изобретения - расширение/функциональных возможностей схватаманипулятора путем. распознавания наличия захваченной детали,На чертеже изображен схват маниулятора, общий вид,Схват манипулятора содержит труби Бурдона 1, внутренние полости 2которых каналом 3 соединены с источ 1 иком...
Схват

Номер патента: 1572805
Опубликовано: 23.06.1990
Авторы: Смирнов, Юдин, Яськевич
МПК: B25J 15/00
Метки: схват
...меньшедлины сменного упора 20 на величину,равную двум ходам дополнительной зуб.чатой рейки 5, Длина пазов 18 и 19обеспечивает свободный ход плечей 16и 17 при движении дополнительной зубчатой рейки 5,Схват работает следующим образом.Для захвата детали за внутреннююповерхность сменный упор 20 и заглушка 21 устанавливаются в положение,показанное на фиг. 2, Затем от привода 26 через шток 25 на плечо 22 рычага 14 подается усилие. 11 ри этом двуплечие рычаги 14 и 15 поворачиваютсявокруг осей 13, а их плечи 16 и 17расходятся в противоположные стороны,Плечо 16, взаимодействуя со сменнымупором 20, перемещает дополнительнуюзубчатую рейку 5, жестко связанную споследним, влево, сжимая пружину 7между корпусом 1 и стопорным кольцом11 посредством шайб...
Захватная головка манипулятора

Номер патента: 1572806
Опубликовано: 23.06.1990
Авторы: Коноплянко, Ручка, Рябов, Селиванов
МПК: B25J 15/00
Метки: головка, захватная, манипулятора
...движения валат.е. схват 17 с.деталью при этомповорачивается в сторону продолженияуже остановившегося его линейногосмещения, изгибая спиральную пружину18 относительно ее среднего положения. Продолжающееся сканирование запястья уже осуществляет угловое "рыскание" детали, При нахождении требуемого линейного и углового взаимногоположения деталей сборки дальнейшееизлишнее сканирование стакана 16компенсируется спиральной пружиной18. Таким образом, максимум за дваоборота привода 13 и несколько оборотов привода 6 сборочная системаприходит в требуемое положение сначала по линейному, затем по угловомуразбросу допусков, максимальные суммарные пределы которых заданы величиной эксцентриситета втулки 2 и соответствуют охватывающей окружности нг...
Захватное устройство манипулятора

Номер патента: 1572807
Опубликовано: 23.06.1990
Авторы: Кондратенко, Марковский, Филаретов
МПК: B25J 15/00
Метки: захватное, манипулятора
...пальцы4 и 5 сходятся, зажимая заготовку. 40,Обеспечив создание первым схватом тре, буемого сжимающего усилия системауправления манипулятора отключает привод 16 и обмотку электромагнита 25первого Аиксатора, стержень 23 которого под действием пружины 22 входитв одно из углублений 26, обеспечиваянадежное удерживание заготовки и фиксацию первого схвата относительно основной головки 2. Затем манипулятор 50перемещает захватное устройство с заготовкой к токарному станку, в частности второй схват с пальцами 6 и 7 -к обработанной на станке детали так,что продольная ось детали перпендикулярна продольной оси захватного устройства, Патрон станка опускает деталь, при этом одновременно подаетсяпитание на привод 16 и обмотку электромагнита 25 второго...
Схват промышленного робота

Номер патента: 1572808
Опубликовано: 23.06.1990
МПК: B25J 15/02
Метки: промышленного, робота, схват
...напряжения питания на электродви гатель 10 начинает вращаться его вал с резьбовой частью 7, по которому клин 6 перемещается вниз, при этом ползуны 4 скользят по клину 6 вверх, увеличивая расстояние между ползунами 4, и эа счет шарнирного крепления хвостовиков 3 в корпусе 1 губки 2, сближаясь, начинают охватывать предмет 12,При проскальзывании губок 2 (при неправильном охвате предмета - если55 возникает такая ситуация) по предмету 12 с датчиков проскальзывания, установленных на губках 2 (не показаны), поступают сигналы в блок управления для реверса двигателя (не показан), электродвигатель 10 вращает вал в обратном направлении. В этом случае губки 2 ослабляют охват предмета 12, Затем датчики касания подают команду снова на реверс...
Вакуумный захват

Номер патента: 1572809
Опубликовано: 23.06.1990
МПК: B25J 15/06
...18, рабочего торца 19 и полости 20. Периферийная часть эластичнойприсоски 17 закреплена на кольце 21 45с помощью прижимного кольца 22 и винтов 23. На внутренней поверхностикольца 21 выполнена резьба, взаимодействующая с наружной резьбой втулки 4,Стержень 24 закреплен на кольце 21 и Оразмещен с возможностью осевого перемещения в направляющей втулке 25, закрепленной на шайбе 14, и в сквозномотверстии 26 корпуса 1. Вакуумный захват работает следующим образом.Перед позиционированием на деталь27 и подключением источника вакуумарегулируется диаметр рабочего. торца19 эластичной присоски 17. Для этоговключается микроэлектродвигатель 8,что приводит к вращению втулки 4, которая, вращаясь, вызывает осевое движение полого штока 10 и кольца 21...
Устройство для установки бесконтактного датчика на захвате

Номер патента: 1572810
Опубликовано: 23.06.1990
Автор: Сало
МПК: B25J 19/02
Метки: бесконтактного, датчика, захвате, установки
...подпружинена пружиной 6, Бесконтактный датчик 4 может быть выполнен съемным и устанавливается с помощью гаек 7. Упругая пластина 5 одним своим концом крепится на основании 1 винтами 8,. На другом конце упругой пластины 5 установлен защитныйкожух 9, имеющий форму полусферы.,Вершина 10 защитного кожуха 9 удалена от бесконтактного датчика 4 наасстояние т , которое не превышаеторога чувствительности бесконтактно 1 о датчика 4,готовку 11. Защитный кожух 9 вместес упругой пластиной 5 отклоняется(показано пунктиром), Это предохраняет бесконтактный датчик 4 от соударения с заготовкой 11. 2 ил,Устройство работает следующим образом.Захват 3 опускается на стопу заготовок 11 и 12, Если при этом вершина 10 проходит мимо заготовки, то в тот момент,...
Привод шагового перемещения

Номер патента: 1574449
Опубликовано: 30.06.1990
Авторы: Запольский, Несоленый, Хмельковский
МПК: B25J 9/00
Метки: перемещения, привод, шагового
...преодолаваяусилие пружины 19, На платформе 3установлен управляемый фиксатор 20с пневмоцилиндром 21 и возвратнойпружиной 22, Фиксатор 20 установлентак, что при его выдвижении он взаимодействует с упорами 5, при этомплоскость поворота Фиксатора 17 или18 (в зависимости от направления движения) находится в плоскости расположения упоров 5 и фиксатора 20.Для холостого перемещения манипулятора 1 может использоваться тради,ционный привод, состоящий, например,иэ асинхронного электродвигателя 23,соединенного муфтой 24 с редуктором 25 и цепной передачей.26 с осью 27 колес 7. При изменении направления шагового перемещения платформы 3 происходит поворот вала 28, на котором установлены фиксаторы 17 и 18, с помоцью привода 29.Для обеспечения точности...
Захватное устройство

Номер патента: 1574450
Опубликовано: 30.06.1990
МПК: B25J 15/00
Метки: захватное
...образует цевочное зацепление, Корпус 3относительно основания 1 фиксируется фиксатором 10. Захватное устройство работает следующим образом,Избыточное давление подается в бесштоковую полость силового цилиндра 2, шток 7 вместе с вилкой 8 перемещается в крайнее нижнее положение. Вилка 8, действуя на ролики 5, разводит зажимные рычаги 4, При этом собачка 9 заходит за встречный ролик 6, После этого захватное устройство устанавливают над деталью таким образом, чтобы захватывающая деталь оказалась между разведенными рычагами 4, Затем подается избыточное давление в штоковую полость силового цилиндра 2, которое вызывает перемещение штока 7 в крайнее верхнее положение. При перемещении штока 730 35 4045 5 10 15 20 вилка 8 перестает...
Автооператор

Номер патента: 1576271
Опубликовано: 07.07.1990
Авторы: Кряжев, Фортунатов
Метки: автооператор
...рычага 16 и вращения вместе с осью 23 за счет фиксатора 30, взаимодействующего с пазом 32 оси 23. На захвате 18 установлен пневмоцилиндр 33, который штоком связан с подвижной губкой 34 захвата 18, имеющей в верхней части регулируемый упор 35, а в нижней - базирующее отверстие диаметром, равным наименьшему диаметру конца детали 36 (заготовки). Подвижная губка 34 установлена на направляющих 31. Для обеспечения работы автооператора со стержне- образными деталями 36 различной длины неподвижная губка 37 захвата 18 может устанавливаться в любом месте направляю 5 10 15 20 25 30 35 40 45 50 55 щих 31 и затем крепиться винтами 38. Фиксатор 30 снабжен пружинами 39, с помощью которых выходит из контакта с пазом 32 оси 23, и имеет ролик 40 для...
Манипулятор

Номер патента: 1576302
Опубликовано: 07.07.1990
Авторы: Здоровцев, Козак, Петровский
МПК: B25J 1/00
Метки: манипулятор
...в виде звеньев 6, расположенных в параллельных плоскостях и соединенных между собой шарнирами 7, причем первое звено 6 каждой шарнирной цепочки 3 связано с выходным валом привода 8 перемещения, установленного на поворотном звене 2, а последнее звено 6 закреплено на соединительной опоре 4. Для увеличения подвижности рабоче" го органа 5 первые и последние звенья 6 шарнирных цепочек выполнены различ- З ной длиныНапример, при плоскостно- поворотном схвате первое (от звена поворота) и последнее (к звену схвата) звенья 6 одной из шарнирных цепочек выполняются по длине в два ра 40 за короче, нежели каждое иэ остальных звеньев шарнирных цепочек. При объемноповоротном исполнении длины указанных звеньев 6 соответственно составляют одну, третью...
Промышленный робот

Номер патента: 1576303
Опубликовано: 07.07.1990
Авторы: Бердник, Болтышев, Захаров, Паршин
МПК: B25J 9/00
Метки: промышленный, робот
...каждой пары ЭПМ 11 - 13, Датчики обратной связи по положению и скорости перемецения звена 4 установлены на последнем в районе оси его вращения и кинематически связаны со звеном 3, Фиксируя относительные перемещения и скорость звеньев 3 и 4 друг относительно друга, Аналогичные датчики (ими могут быть, например, соответственно переменный резистор типа ППМЛ и тахогенератор серии ТХЛ) установлены на звене 3, Фиксируя параметры его перемещения относительно оси 9 (фиг, 2), жестко соединенной с основанием 2. Положение и скорость вращения основания 2 Фикси. руются аналогичными датчиками, установленными на нем и кинематически взаимодействующими с неподвижным зубчатым колесом 7.1Управление ЭП 11, входящими в каждую пару, осуществляется с...
Модуль резонансного манипулятора

Номер патента: 1576304
Опубликовано: 07.07.1990
Авторы: Акинфиев, Белов, Кошель, Юрченков
МПК: B25J 9/00
Метки: манипулятора, модуль, резонансного
...защелка 9 попадает в гнездоподвижного звена, соответствующееэтому крайнему положению. Двигатель5 отключается, а пружина 7 оказывается более закрученной, чем пружина6. Более предпочтительным являетсятакой предварительный натяг пружин6 -и 7, при котором в любом из крайних положений подвижного звена 2обе пружины находятся под нагрузкойодного знака,Такое нагружение значитепьно уве личивает срок службы пружин и, крометого, исключает люфт в местах соединения пружин с подвижным звеном иликорпусом. Наличие дополнительнойпружины с противоположным направлением навивки расширяет, кроме того,пределы настройки привода, так какодновременным укорачиваем или удлинением рабочих частей обеих пружинможно регулировать их жесткость вшироких пределах,...
Промышленный робот

Номер патента: 1576305
Опубликовано: 07.07.1990
МПК: B25J 9/00
Метки: промышленный, робот
...из одного крайнего положенияв другое. Позиционирование рукирегулируется упорами 20, установленными в крышках 19, Двуплечий рычаг11, повернутый силовым цилиндром 14.взаимодействует с поверхностями Вили Е Фигурного паза 10 поршня 5,передавая силовое .воздействие черезвал 12 на демпфирующие устройства16, при этом между упором 17 и корпусом демпфирующего устройства 16 имеется зазор.Дополнительный шток 21 поршня 6оказывает дополнительное демпфирующеевоздействие воздушной подушкой, образуемой при перекрывании отверстий24 в крышках 25, заставляя сжатыйвоздух перетекать через дроссель 26.При повороте руки 1 на угол, мень- ший или равный 90, двуплеций рычаг11, повернутый дополнительным силовым цилиндром 14 в другое крайнееположение,...
Резонансный привод

Номер патента: 1576306
Опубликовано: 07.07.1990
Авторы: Акинфиев, Дауге, Романов
МПК: B25J 9/00
Метки: привод, резонансный
...незначительно, (В случае заметного изменения усилия пружины от ее длины математическая модель привода будет другой, однако,и в этом случае привод сохранит свойство резонансного),Привод работает следующим образом.В исходном положении (изображенном пунктиром на фиг. 1 и 9), т.е. в положении неустойчивого равновесия подвижного звена 5, соответствующему одному иэ положений позиционирования исполнительного органа 12 (и наибольшем: растяжению пружины 1), плечо криво- шипа 4, водило .7 и ось пружины 1 расположены по одной прямой, причем .палец 3 кривошипа 4 находится на максимальном удалении от центра звена 6, а Фиксатор. 13 входит в соответст+ вующий паз в одном из. звеньев привода, например в водиле 7, удерживая все звенья привода в данном...
Манипулятор

Номер патента: 1576307
Опубликовано: 07.07.1990
Автор: Белов
МПК: B25J 11/00
Метки: манипулятор
...цепь 7Вместо50срезного штифта 17 может быть использован подпружиненный фиксатор,цто обеспечивает многократность егосрабатывания без замены, Манипулятор55должен снабжаться комплектом узлов10 с различными величинами изгиба унаправляющей 18. На цепь 7 могут устанавливаться несколько узлов 10,что позволит получить сложную конфигурацию изгиба цепи 7. На узле 11 крепления имеются отверстия 19 для закрепления на нем растяжки и при необходимости кабеля (не показаны). Растяжка препятствует случайному повороту звеньев цепи 7.Привод 12 возврата узлов измеиени 1 направления перемещения выполнен в в виде лебедки и канатов 20, связывающих корпуса 15 узлов изменения направления перемещения цепи 7 с лебедкой.Манипулятор работает следующим...
Привод робота-манипулятора

Номер патента: 1576308
Опубликовано: 07.07.1990
Автор: Литвиненко
МПК: B25J 11/00, B25J 9/12
Метки: привод, робота-манипулятора
...(Фиг. 2) состоитиз участка линейных проводников 16 илобовых частей. Лобовые части секции включают боковые 2 и 25 и центральный 26 участки.Дополнительная магнитная системаустановлена в зоне лобовых частей 17на основании 27, Она имеет магнитопровод 28, катушку 29 и полюсные наконечники 30, установленные у лобовыхчастей 17. 50Привод работает следующим образом,При приходе модуля в точку позиционирования якорь 15 помещается взазоре между полюсами 18 основноймагнитной системы 19 (линейные проводники 16) и между полюсами 30 дополнительной магнитной системы 28(лобовые части 17), Включается питание модуля, ток по щеткам 22 подводится к якорю 15До этого моментавремени пружины 12 поджимают обоймы11 с подшипниками 10 к диску 7. Накладки 9 прижаты к...
Задающее устройство манипулятора

Номер патента: 1576309
Опубликовано: 07.07.1990
Авторы: Джамалов, Индулов, Слуцкий, Трунов
МПК: B25J 13/02, B25J 3/00
Метки: задающее, манипулятора
...пластинами 12,закрепленными одним концом на. основании 2. Упругие пластины разделенына три группы: упругие пластины 3,7 и 8 взаимодействуют со стержнем 9, упругие пластины 5 и б. - сосферой 10; а упругие пластины 12 - спальцами 11. На упругих пластинах3-8 и 12 установлены датчики 13-20положения, На рукоятке 1 управленияустановлен, тумблер 21 для сжатия илиразжатия схвата исполнительного органа манипулятора, Датчики 13-20 положения выполнены в виде тензодатциков 22 или контактных датчиков 23.Устройство работает следующимобразом,Оператор манипулирует рукояткой1 управления, при этом осевые перемещения стержня 9 вызывают деформацию упругих пластин второй группы,отклонения стержня 9 от оси вызываютдеформацию упругих пластин первой 7 б 3...
Схват манипулятора

Номер патента: 1576310
Опубликовано: 07.07.1990
МПК: B25J 15/00, B25J 15/06
Метки: манипулятора, схват
...ра расшитей ворот щий схват, об 2-сеа Фи корубки ключае пулятор ором за плены де эла ыпуцим ичных енные в олненны иненных ройствоглухих матеой вакуумля свед ластичных вид,в разрезе А-А на Фиг. 1Схват мани пус 1, на кот 2 - 5, выпол баллонов, эап риалом и соед системой, уст губок в виде губками, удерживающими Е мя как другая пара губок дновременно со сведениется в обратном направ- Собъекта относительно продольной оси схвата с сохранением удержания объекта давления в трубках 6, 7, 10 и 11 стравяивается, и губки 2 и ч разжимаются, Одновременно прекращается вакуумирование внутренних полостей всех губок, стравливается давление в трубках 8 и 12 на губка 3 и 5, повышается давление в трубках 9 и 13 для сохранения силы захвата объекта и...
Электромагнитный захват

Номер патента: 1576311
Опубликовано: 07.07.1990
Авторы: Дзекан, Дробот, Руденко
МПК: B25J 15/06, B25J 19/00
Метки: захват, электромагнитный
...магнитоуправляемого контакта 6. Для откреплениядетали источник тока отключают,Формула изобретения Составитель И.ИлюковичРедактор Н.Рогулич Техред ц.сердокона Корректор Н.Ревская иееЗаказ 1817 Тираж 69 Й ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР,113035, Москва, Ж, Раушская наб., д. 1/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина,101 Изобретение относится к машиностроению и может быть использованов качестве рабочего органа-манипулятора.Целью изобретения является расши 5рение технологических возможностейэлектромагнитного захвата,На чертеже изображен электромагнитный захват, общий вид,10Захват содержит, й-обра эный ма гнитопровод 1 с катушкой 2 возбуждения,В центральном...