Манипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1572802
Автор: Мамыкин
Текст
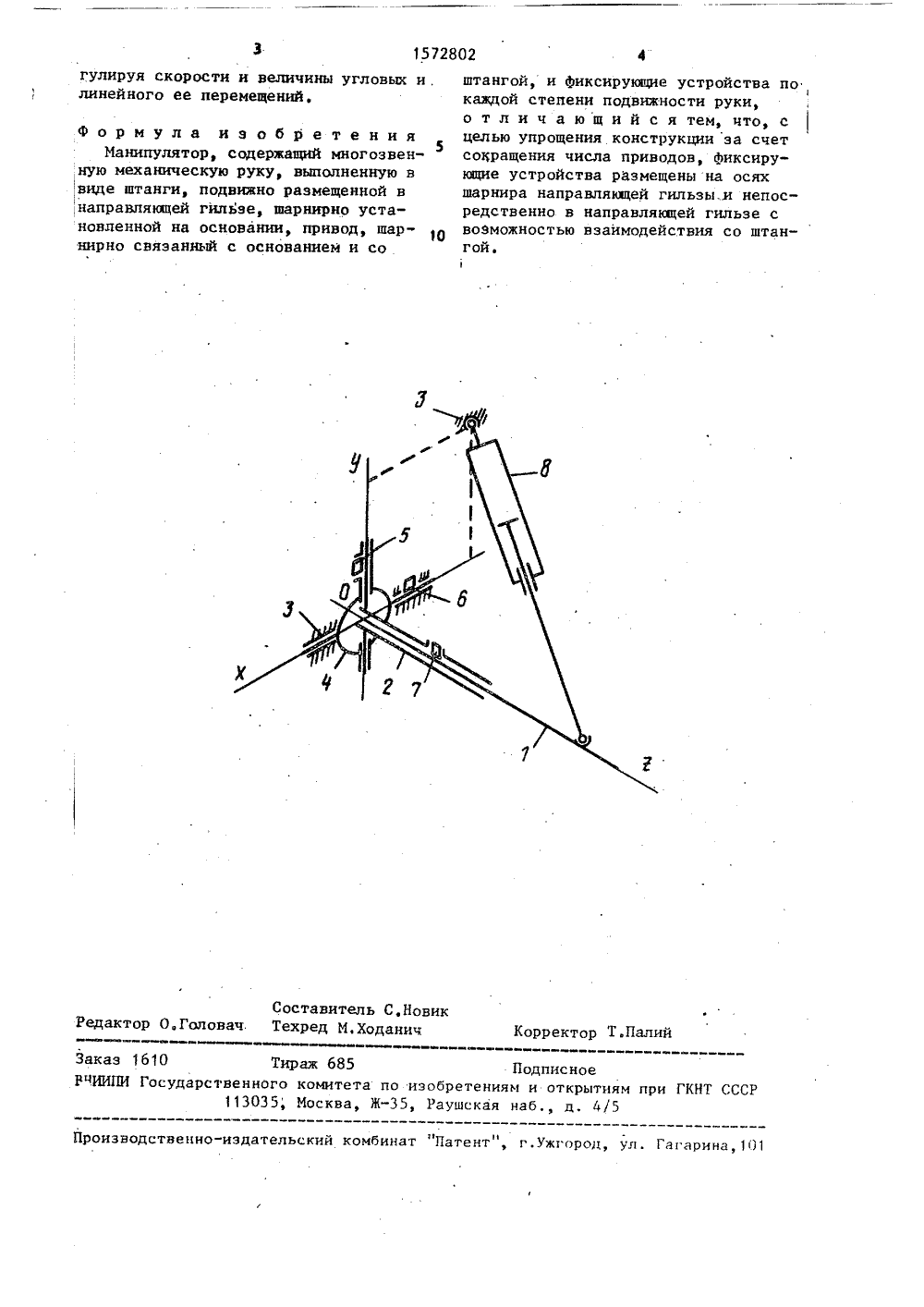
(51 5 3 ПИСАНИЕ ИЗОБРЕТЕН СВИДЕТЕЛЬСТВ АВТОРСИ(54) МАНИПУПЯтОР (57) Изобретение строению и может относится к маши ть использовано в Привод 8 штанге 1 по 90 к осямрикладывает усил е 0 е равньп ости, т углом,е подвпроаприн 1 ко е ко сок нулю. Вео и линей иксирующи о обеспелагаемыи штанге 1 в чае фиксиустановлен арнира 4 и чены,яющаята игу 1 тавл кальная со 8 заставл ри этосилия т ивод овер икал и ние ш кости апр При необходе 1 сложного стройства 5-7 работу по з ния штан- сируюшие имости созд движения фи и привод 8 аданной прогВ ключ а нае яамме, реГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР Изобретение относится к машиностроению и может быть использовано в робототехнике в качестве манипуляЦель изобретения - упрощеструкции манипуляторов за счращения числа приводов. На чертеже изображен пред манипулятор.Манипулятор содержит механическуюруку, выполненную в виде штанги 1,подвижно размещенной в направляющейгильзе 2, соединенной с основанием 3посредством шарнира 4. На осях шарнира 4 и в направляющей гильзе 2 установлены фиксирующие устройства5-7, Привод 8 шарнирно соединен соснованием 3 и штангой 1 и выполнен,например, в виде силового цилиндра.Шарнир 4 представляет собой, например, шарнир Гука или шарнир с разнесенными перекрещивающимися осями,Фиксирующие устройства 5-7 представляют собой, например, тормозные колодки,Манипулятор работает следующим обр бототехнике в качестве манипулятора, Целью изобретения является упрощение конструкции манипулятора путем сокращения числа приводов. При включении привода 8 и соответствующих Фиксирующих устройств 5-7, размещенных на осях шарнира гильзы и в напра ляющей гильзой по заданной программе обеспечиваются угловые или линейные перемещения штанги 1 по соответствую щим степеням подвижности, 1 ил,екции усилия привода на мер, артогональной систе нат не должны быть равнь личину и скорость углово ного перемещений задают устройства 5-7, Необходи чить угловое перемещение плоскости УОЕ, В этом сл рующие устройства 5 и 7 ные на вертикальной оси в направляющей гильзе 2 ать угловое перемещение в верной плоскости. Аналогично прот при необходимости перемещеанги 1 в горизонтальной плосили в осевом направлениияющей гильзе 2,4 1572802 Составитель С,НовикРедактор О,Головач Техред М,Ходанич Корректо ий Заказ 1610 Тираж 685 ПодписноеРчИИПИ Государственного комитета по изобретениям и открытиям113035, Москва, Ж, Раушская наб д, 4/5 КНТ СССР Патент", г ул . Гагари роизводственно-издательский би гулируя скорости и величины угловых и,линейного ее перемещений. Формула изобретения5Манипулятор, содержащий многозвенную механическую руку, выполненную в виде штанги, подвижно размещенной в направляющей гильзе, шарнирно установленной на основании, привод, шарнирно связанный с основанием и со штангой, и Фиксирующие устройства покаждой степени подвижности руки,о т л и ч а ю щ и й с я тем, что, сцелью упрощения конструкции за счетсоцращения числа приводов, Фиксирующие устройства размещены на осяхшарнира направляющей гильзы.и непосредственно в направляяцей гильзе свозможностью взаимодействия со штангой.1
СмотретьЗаявка
4484866, 16.09.1988
ПРЕДПРИЯТИЕ ПЯ Г-4736
МАМЫКИН МИХАИЛ АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор
Опубликовано: 23.06.1990
Код ссылки
<a href="https://patents.su/2-1572802-manipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор</a>
Устройство для управления приводами многофункционального протеза

Номер патента: 938991
Опубликовано: 30.06.1982
Авторы: Биушкин, Васильев, Гинзбург, Райцын, Шаров
МПК: A61F 1/06
Метки: многофункционального, приводами, протеза
...на управляющий, вход схемы 11 запрета, которая исключает прохождение управляющих сигналов с входов 15 и 16 устройства управления на входы схемы 1 записи, При неодновременном снятии сигналов с входов 15 и 16 состояние триггера 10, запоминающего устройства 2 и схемы 11 запрета не изменяется. Триггер 10 возвращае 1 ся в нулевое состояние только после исчезновения сигналов с входов 15 и 16, Таким образом обеспечивается сохранение информации в запоминающем устройстве 2 при неодновременном снятии управляющих сигналов с входов 15 и 16.Управление работой устройства 23 переключения кинематических пар осуществляется следующим образом.Сигналы с выхода запоминающего устройства 2 через дешифратор 4 поступают на первую группу входов схемы 14...
Устройство для промывки щелочной аккумуляторной батареи1известно устройство для промывки щелочной аккумуляторной батареи, например магистральных локомотивов, содержащее узел съема чехла, узел мойки и сушки чехл

Номер патента: 429484
Опубликовано: 25.05.1974
МПК: H01M 10/42, H01M 2/36
Метки: аккумуляторной, батареи, батареи1известно, локомотивов, магистральных, мойки, например, промывки, содержащее, сушки, съема, узел, чехл, чехла, щелочной
...в действие привод 70. Толкатель 93 перемещает штангу 94 вправо, и через систему рычагов 95 изоляционные захваты 96 механической руки 12 отводятся от контактных шпилек аккумулятора, при этом механическая рука 12 оставляет аккумулятор в каркасе 20, В конце хода толкателя 93 срабатывает концевой выключатель К 1.На позиции Ч получает питание катушка В 1 и приводит в действие привод 67, который поднимает вверх траверсу 66.Размыкаются контактные элементы в цепи проводов 110 и 111, катушка В 7 обесточиваег. ся, привод 72 возвращается в исходное положение, и через систему рычагов 118 каретка 61 с расположенными на ней кантователем 60 перемещается горизонтально в направлении камеры 16, затем разворачивается в исходное положение, после чего...
Устройство для управления перемещением подвижных узлов, например, исполнительных механизмов работаманипулятора

Номер патента: 515633
Опубликовано: 30.05.1976
Авторы: Воробьев, Деменков, Каневский, Тамарченко, Хаскович, Холмянская
МПК: B25J 9/00
Метки: исполнительных, механизмов, например, перемещением, подвижных, работаманипулятора, узлов
...агрегат, двигаясь по монорельсу 1. Расположение короткого выступа-кулачка 20 зависит от того, с какой стороны к гребенке 10 подходит исполнительный механизм. Этот выступ- кулачок располагается так, чтобы датчик положения исполнительного механизма сначала 5 10 15 20 25 30 35 40 45 50 55 60 56 взяимочствовя,ч с ллишпми выступами-куяцкямп9 д:5 ".юр.Овация кодово 10 сигила о го.ои:с:ии полггельного механизма, а затем с коротким выступом-кулачком 20.Датчик 9 аналогичен по конструкции датчику 8, Датцик 9 взаимодействует с гребенками 10, зякрепленшями ня штанге 5, формирует одиозна шый кодовый сигнал о положении штанги 5 относительно тележки 2 и чает команду на изменение скорости и останов вертикального перемещения.Механизм 7 поворота руки...
Устройство для регулировки привода сцепления автомобиля

Номер патента: 1379133
Опубликовано: 07.03.1988
Авторы: Кукоба, Михалев, Филиппов
МПК: B60B 29/00
Метки: автомобиля, привода, регулировки, сцепления
...10 перемещает вдоль оси поршень 11 силового цилиндра 4. На задней крышке 12 силового цилиндра 4 рас. псложен упор 13 силового цилиндра. Г 1 ривод сцепления автомобиля содержит педаль 14 сцепления, упор 15 педали, возвратную пружину 16, трос 17, гайки 18.Устройство для регулировки привода сцепления работает следующим образом.Захватом 1 устройство навешивается на педаль 14 сцепления, а упором 13 упи рается в любую наиболее добнук часть салона автомобиля, например в резьбовые шпильки крепления сидений. Г 1 ри связи источника давления с полостьк Ь силового цилиндра 4 перемещается шток 3, который ввою очередь иерем( щает педаль 14 сцепления до упора 15 педали. В то же врсмя поршень 1, взаимодействуя с щупом 1 О, перемещает подпружиненную...
Устройство для распределения потока однородных предметов, например, трафаретных листов с заготовками бисквита после штамп-машины, на несколько потоков

Номер патента: 100658
Опубликовано: 01.01.1955
Автор: Соколов
МПК: B65G 47/00
Метки: бисквита, заготовками, листов, например, однородных, после, потока, потоков, предметов, распределения, трафаретных, штамп-машины
...в поперечном направлении выполнено в виде рычага, шарнирно закрепленного одним концом и вертичальноц оси няд транспортером и совершающего колебательные движения с остановками в плоскости, парллельной плоскости транспортерной ленты. На свободном конце рычаг установлена пластина, закрепленная ня вертикальной оси, свободно вращающейся в рычаге и несугцей на себе звездочку, соединенную цепью с другой такой же звездочкой. Последняя звездочка закреплен н неловИЯ ПОТО КА ОДН О РОД Н Ь ХРАфАРЕТНЫХ ЛИСТОВОСЛЕ ШТАМП-МАШИНЫ,ПОТОКОВПластина 9 закреплена яа вертикальной, свободно вращающейся оси 10, несущей на себе звездочку 11, соединенную цепью 12 со звездочкой 13, закрепленной на неподвижной оси 6 шарнира рычага 5, олагодаря чему пластина 9...
Предыдущий патент: Резонансный манипулятор
Следующий патент: Захватная головка
Случайный патент: Резиновая смесь на основе фторкаучука