Модуль резонансного манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
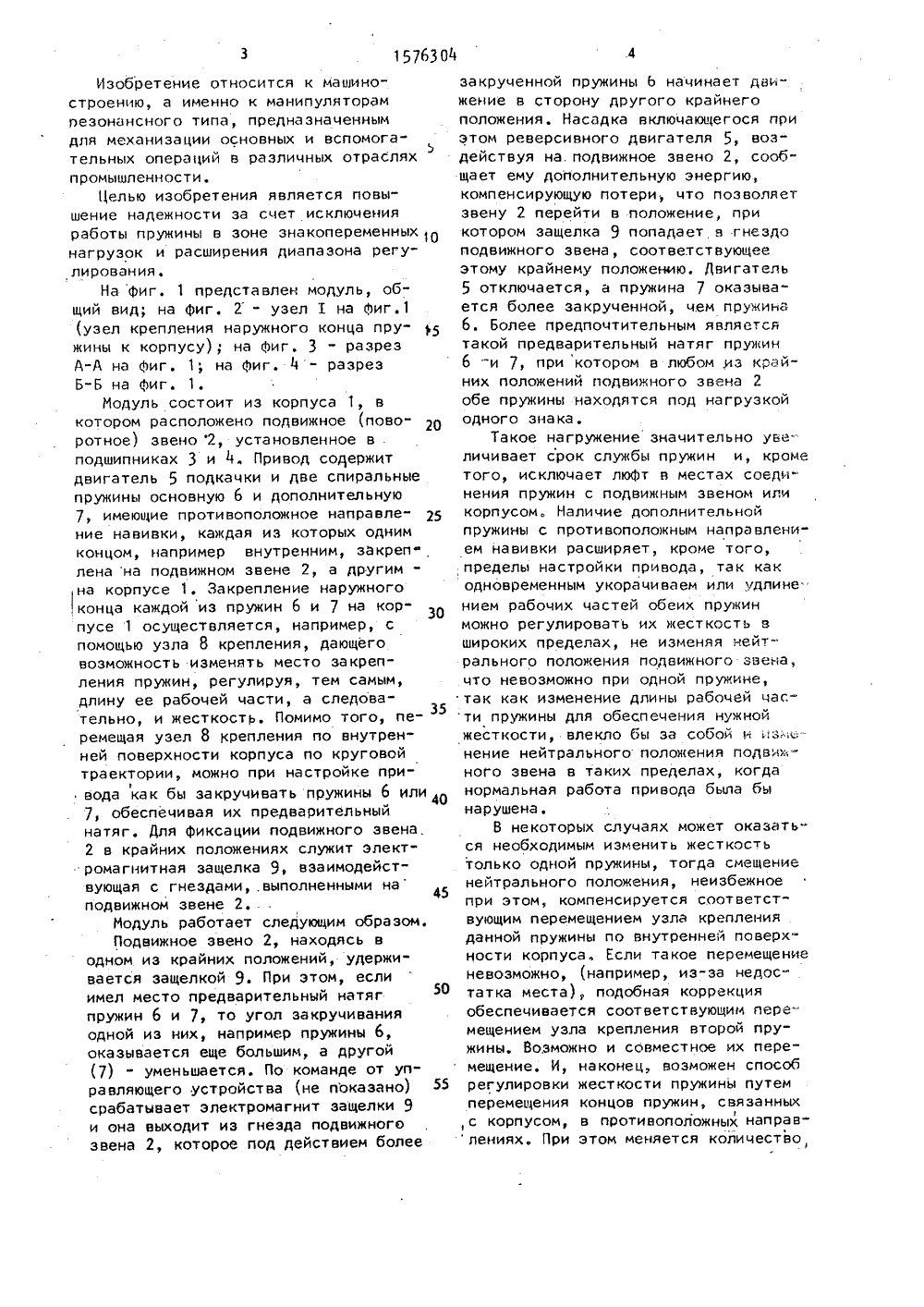
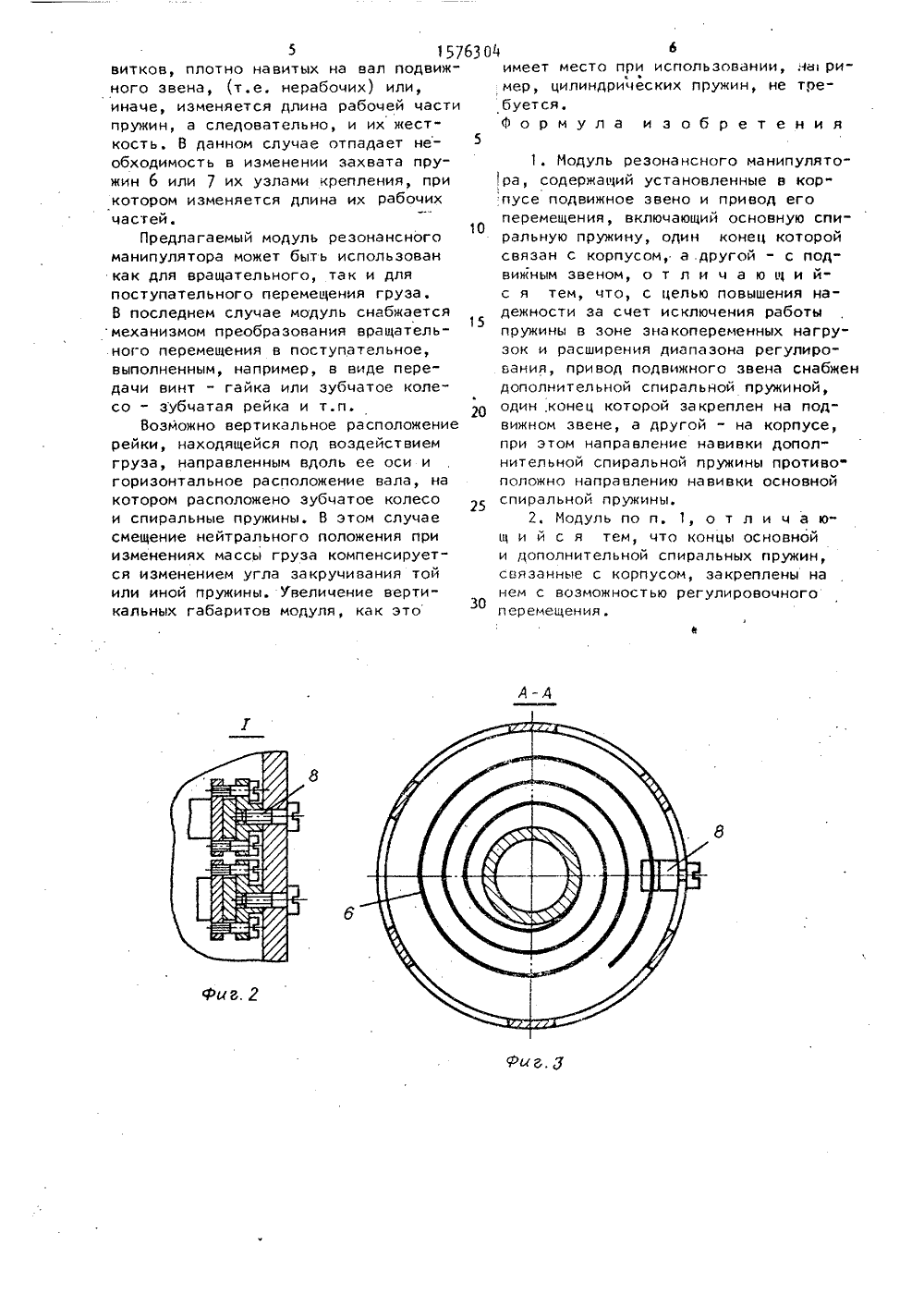
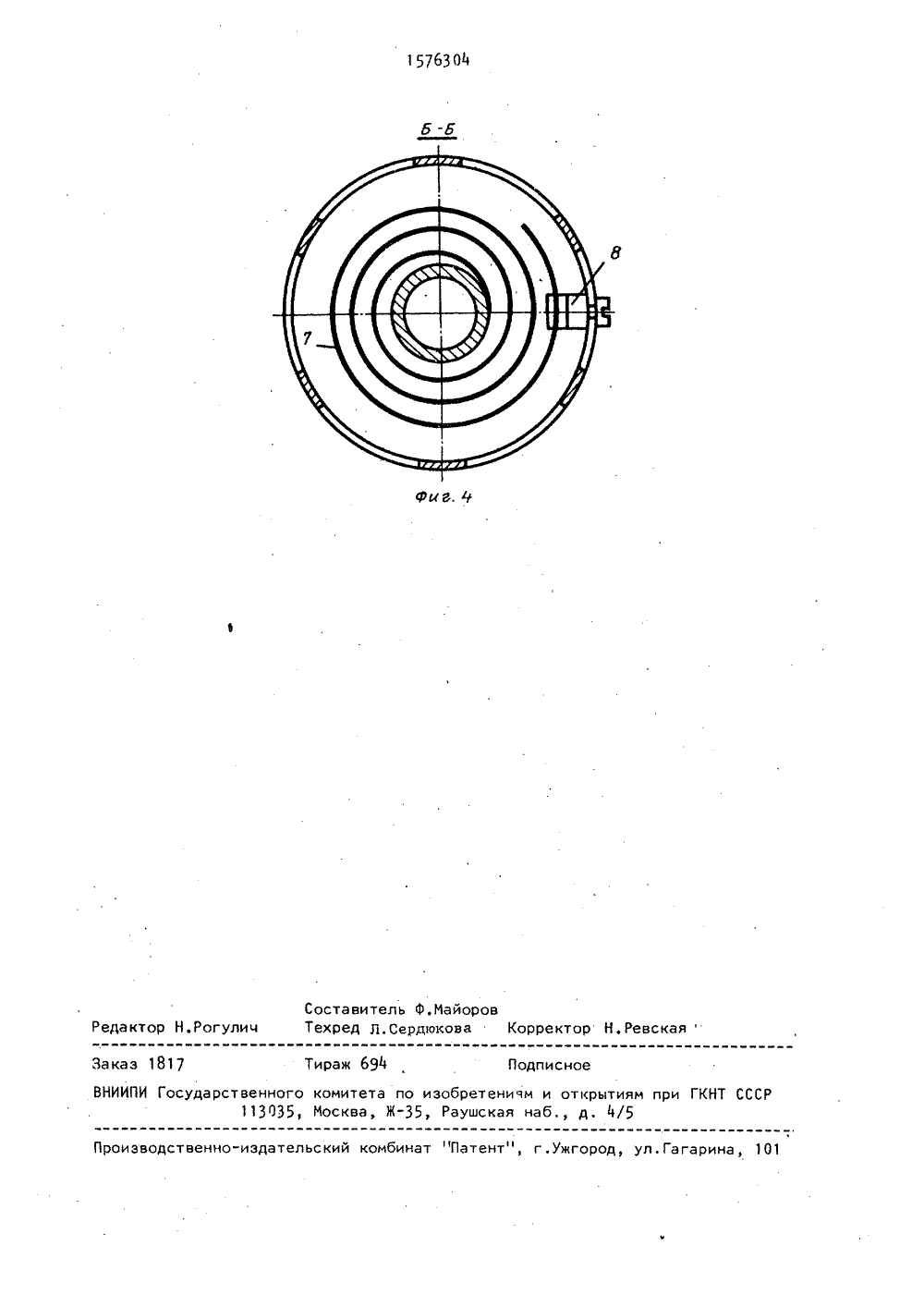
,1),В 25 9/О ИСАНИЕ ИЗОБРЕТЕН ВТОРСНОМУ ТЕЛЬСТВУ ора ретести з фи(54) МОДУЛЬ РЕЗОНАНСНОГО МАНИПУЛЯТОРА(57) Изобретение относится к машиностроению, а именно к манипулят мрезонансного типа, предназначеннымдля механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобния является повышение надежно асчет исключения работы пружины в зонезнакопеременных нагрузок и расширения диапазона регулирования, Модульповорота состоит из корпуса 1 с под"вижным звеном 2 и Фиксаторами крайнихположений. Привод перемещения подвижного звена 2 содержит двигатель подкачки 5 и две спиральные пружины:основную 6 и дополнительную 7, каждая из которых одним концом закреплена на корпусе 1, а другим - наподвижном звене 2. Причем направлениенавивки одной пружины противоположнонаправлению навивки другой, а концыпружин, связанные с корпусом 1, закреплены на нем с возможностью регулировочного перемещения для смещениянейтрального положения звена или изменения жесткости пружин. 1 эи.1-лы 4 ил, 1576304Изобретение относится к машиностроению, а именно к манипуляторамрезонансного типа, предназначеннымдля механизации основных и вспомога 5тельных операций в различных отрасляхпромышленности.Целью изобретения является повышение надежности за счет исключенияработы пружины в зоне знакопеременных 10нагрузок и расширения диапазона регулирования,На фиг. 1 представлен модуль, общий вид; на фиг. 2 - узел 1 на фиг,1(узел крепления наружного конца пружины к корпусу); на фиг. 3 - разрезА-А на фиг. 1; на фиг. 4 - разрезБ-Б на фиг. 1.Иодуль состоит из корпуса 1, вкотором расположено подвижное (поворотное) звено 2, установленное вподшипниках 3 и 4. Привод содержитдвигатель 5 подкачки и две спиральныепружины основную 6 и дополнительную7, имеющие противоположное направление навивки, каждая иэ которых однимконцом, например внутренним, закреп"лена на подвижном звене 2, а другимна корпусе 1, Закрепление наружногоконца каждой из пружин 6 и 7 на корпусе 1 осуществляется, например, спомощью узла 8 крепления, дающеговозможность изменять место закрепления пружин, регулируя тем самым,длину ее рабочей части, а следовательно, и жесткость, Помимо того, пе 35ремещая узел 8 крепления по внутренней поверхности корпуса по круговойтраектории, можно при настройке привода как бы закручивать пружины 6 или 40обеспечивая их предварительныйнатяг. Для фиксации подвижного звена,2 в крайних положениях служит электромагнитная защелка 9, взаимодействующая с гнездами,.выполненными наподвижном звене 2,Иодуль работает следующим образом.Подвижное звено 2, находясь водном из крайних положений, удерживается защелкой 9. При этом, еслиимел место предварительный натягпружин 6 и 7, то угол закручиванияодной из них, например пружины 6,оказывается еще большим, а другой(7) - уменьшается. По команде от управляющего устройства (не показано) 55срабатывает электромагнит защелки 9и она выходит из гнезда подвижногозвена 2, которое под действием более закрученной пружины Ь начинает движение в сторону другого крайнегоположения. Насадка еключающегося приэтом реверсивного двигателя 5, воздействуя на. подвижное звено 2, сообщает ему дополнительную энергию,компенсирующую потери, что позволяетзвену 2 перейти в положение, прикотором защелка 9 попадает в гнездоподвижного звена, соответствующееэтому крайнему положению. Двигатель5 отключается, а пружина 7 оказывается более закрученной, чем пружина6. Более предпочтительным являетсятакой предварительный натяг пружин6 -и 7, при котором в любом из крайних положений подвижного звена 2обе пружины находятся под нагрузкойодного знака,Такое нагружение значитепьно уве личивает срок службы пружин и, крометого, исключает люфт в местах соединения пружин с подвижным звеном иликорпусом. Наличие дополнительнойпружины с противоположным направлением навивки расширяет, кроме того,пределы настройки привода, так какодновременным укорачиваем или удлинением рабочих частей обеих пружинможно регулировать их жесткость вшироких пределах, не изменяя нейтрального положения подвижного звена,. что невозможно при одной пружине, так как изменение длины рабочей части пружины для обеспечения нужной жесткости, влекло бы за собой и из: -нение нейтрального положения подвижного звена в таких пределах, когданормальная работа привода была бынарушена.В некоторых случаях может оказаться необходимым изменить жесткость только одной пружины, тогда смещение нейтрального положения, неизбежное при этом, компенсируется соответствующим перемещением узла крепления данной пружины по внутренней поверхности корпуса. Бсли такое перемещениеневозможно, (например, из-за недостатка места), подобная коррекция обеспечивается соответствующим перемещением узла крепления второй пружины, Возможно и совместное их перемещение. И, наконец, возможен способрегулировки жесткости пружины путемперемещения концов пружин, связанных,с корпусом, в противоположных направ лениях, При этом меняется количество, 5 157 витков, плотно навитых на вал подвижного звена, (т.е. нерабочих) или, иначе, изменяется длина рабочей части пружин, а следовательно, и их жесткость. В данном случае отпадает необходимость в изменении захвата пружин 6 или 7 их узлами крепления, при котором изменяется длина их рабочих частей.Предлагаемый модуль резонансного манипулятора может быть использован как для вращательного, так и для поступательного перемещения груза. В последнем случае модуль снабжается механизмом преобразования вращательного перемещения в поступательное, выполненным, например, в виде передачи винт - гайка или зубчатое колесо - зубчатая рейка и т.п.Возможно вертикальное расположение рейки, находящейся под воздействием груза, направленным вдоль ее оси и горизонтальное расположение вала, на котором расположено зубчатое колесо и спиральные пружины. В этом случае смещение нейтрального положения при изменениях массы груза компенсируется изменением угла закручивания той или иной пружины. Увеличение вертикальных габаритов модуля, как это 63 ОЙ6имеет место при использовании, на ример, цилиндрических пружин, не требуется.Формула и э о б р е т е н и я 1. Модуль резонансного манипулятора, содержащий установленные в корпусе подвижное звено и привод его 10перемещения, включающий основную спиральную пружину, один конец которойсвязан с корпусом, а .другой - с подвижным звеном, о т л и ч а ю щ и йс я тем, что, с целью повышения надежности за счет исключения работыпружины в зоне энакопеременных нагрузок и расширения диапазона регулирования, привод подвижного звена снабжендополнительной спиральной пружиной,один, конец которой закреплен на подвижном звене, а другой - на корпусе,при этом направление навивки дополнительной спиральной пружины противо"положно направлению навивки основнойспиральной пружины.2, Модуль по и. 1, о т л и ч а ю"щ и й с я тем, что концы основнойи дополнительной спиральных пружин,связанные с корпусом, закреплены нанем с возможностью регулировочногоперемещения.15763 04 Составитель Ф.МайоровТехред Л.Сердюкова Корректор Н,Ревская Редактор Н.Рогулич аказ писное ВНИИП су Производственно-издательский комбинат "Патент", г.ужгород, ул.Гагарина, 101 Тираж 694 Пственного комитета по изобретени 113035, Москва, Ж, Раушская и открытиям при ГКНТ СССб., д. 4/5
СмотретьЗаявка
4468309, 01.08.1988
ПРЕДПРИЯТИЕ ПЯ А-1001
БЕЛОВ ВЛАДИМИР ИВАНОВИЧ, АКИНФИЕВ ТЕОДОР САМУИЛОВИЧ, ЮРЧЕНКОВ ВАЛЕНТИН ФЕДОРОВИЧ, КОШЕЛЬ ВИКТОР АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятора, модуль, резонансного
Опубликовано: 07.07.1990
Код ссылки
<a href="https://patents.su/4-1576304-modul-rezonansnogo-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Модуль резонансного манипулятора</a>
Узел крепления троса к корпусу, например, устройства ударного действия для проходки скважин в грунте

Номер патента: 735851
Опубликовано: 25.05.1980
МПК: F16G 11/00
Метки: грунте, действия, корпусу, крепления, например, проходки, скважин, троса, ударного, узел, устройства
...передние части которых изогнуты не менее, чем дважды в разных направлениях по отношению к их .продольной оси, причем изгибы 4 и 5 размещены по обе стороны отверстий 2,При помощи кронштейнов 3 к корпусу 1 прикреплена петля 6, выполненная иэ троса, К петле б прикреплен трос 7. Обычно трос 7 крепят с помощью ролика (на чертеже не показан)1 ОПетля б кренится к кронштейну 3 за счет того, что в кронштейне 3 выполнено глухое отверстие, в которое устанавливают конец петли 6, а затем стенки кронштейна 3 деформируют на прессе. 15Сжатый воздух подают в устройство по шлангу 8, а удаляют по полости, образованной между шлангом 8 и внутренней стенкой хвостовой части устройства 1, площадь минимального сечения которого остается неизменной.1 оУстройство...
Звено-модуль руки манипулятора

Номер патента: 1194668
Опубликовано: 30.11.1985
Авторы: Копп, Погорелов, Харин
МПК: B25J 1/02
Метки: звено-модуль, манипулятора, руки
...установки датчика,Рука манипулятора состоит иззвеньев-модулей (фиг. 1, 2) 1, 2 и 3и захватного органа 4. Звенья-модуля состыкованы присоединительнымиэлементами 5 и 6 и установлены наблоке 7, представляющем собой неподвижное основание либо один илинесколько приводных механизмов. Звено-модуль руки содержит подвижныеэлементы, выполненные в виде двух 2соединительных фланцев 8, связанныхмежду собой через плоские пружины9 жесткими пластинами 10,С одним из соединительных фланцев8 с помощью шарнира 11 (фиг.3) связан цилиндр 12 пневмопривода линейного перемещения, шток 13 которогос помощью шарнира 14 связан с другимсоединительным фланцем 8. В качест 10 ве приводного устройства звена-модуля можно использовать любой изизвестных приводов:...
Способ осуществления движения ведомого звена модуля резонансного робота и устройство для его осуществления

Номер патента: 1606318
Опубликовано: 15.11.1990
Авторы: Акинфиев, Анисимов, Мишенин
МПК: B25J 9/10
Метки: ведомого, движения, звена, модуля, резонансного, робота
...10 диняя штоковую полость пневмоцилиндра 4и логический элемент С атмосферой, запирая при этом нагнетательную пневмолиниюот компрессора 8. В результате этого муфта7 отключается, а шток 5 останавливается,15 Ведомое звено 1 продолжает двигатьсявправо по чертежу до крайнего правого положения фиксирования. При этом упор 17посредством упора 20 устанавливает золотник 9 в положение запирания. Ведомое зве 20 но 1 неподвижно, и система подготовлена кдвижению в противоположную сторону(влево по чертежу),При расфиксировании фиксатора 2 упор17 отходит от упора 20 и золотник 9 анало 25 гичным образом устанавливается в положение нагнетания, Элемент 21, двигаясьвместе с ведомым звеном 1 влево по чертежу, переключает золотник 10 в...
Металлическое подвижное крепление для лав

Номер патента: 47658
Опубликовано: 31.07.1936
Автор: Иванников
МПК: E21D 23/00
Метки: крепление, лав, металлическое, подвижное
...клетей.На приведенной схеме фнг. 4 показана лава длиной 60 м, в которой устаио ка с од-дна лебедским каннесущими ь,ежду консоных валка 5 и 6 с ьКаждая из этих двуодним (задним) концопосредственно на оскатки 2.Для освобождениякровли отпускаютстержня стяжки, вслеразгружается, и произввслед за уходящим заПередвинув клеть лями два деревян елезной оковкой, х тавровых балок и укреплена не- и, связывающей ом см. установленных в лаот лебедки его пан неподвижно уста- переносный блоки. ая металлическая состоит из шести ых по три в вертинз-под нажим а айкн винтового дствие чего клеть одят перемещение боем. на новое местов упираются хновлены 14 клетейноконцевым металлипунктир).Для перемещениявах клетей канатомправляют через одиновленный и...
Металлическое подвижное крепление для лав

Номер патента: 48065
Опубликовано: 31.08.1936
Автор: Пшенко
МПК: E21D 23/04, E21D 23/08
Метки: крепление, лав, металлическое, подвижное
...6 - схему ( башмаку; задний башмак (фиг. 2) отлирасположения крепления в лаве., чается от переднего только тем, чтоПредлагаемое крепление состоит из на передний стойка опирается симметрех осиовных частей: 1) собственно трично и поэтому там один ролик покрепления 1 (фиг, 6), состоящего из, больше в средине и два поменьше поряда балок и стоек, скрепленных меж-бокам. На заднем башмаке нагрузка неду собой соответствующим образом;симметричная (через укос) и большой2) тяговой части, состоящей из двух ролик является крайним под стойкой.м и фи.2 Фиг.1 Р 3 ф Б ф .3 ф иг Тип,15 из листового железа для поддержания закладки.2. Тяговое устройство настолько просто, что особых пояснений не требует.3. Головное устройство. Соответственно перекладам в...
Предыдущий патент: Промышленный робот
Следующий патент: Промышленный робот
Случайный патент: Стыковое соединение слоистых панелей