B25J — Манипуляторы; камеры, оборудованные манипуляторами
Манипулятор

Номер патента: 1098786
Опубликовано: 23.06.1984
Авторы: Детковский, Дмитриев, Семенов
МПК: B25J 5/00
Метки: манипулятор
...иро)ЦР(ГГ 1 .Р Г О ГНЦИТс,)Ь 30 ЛРУ) ЛС РЖИВЯК) .Ся С )НЧОИЬЮ )13)рсЛКцц: 37 (фИГ. 4).норы 38 и 39 (фиг. 3) огра)ичива)от 3нрцл льнос неречс шсние.с) НИ;.351 ЦР Рс 100 ТЯСт ССЕ,) К)ИИ) ООр)3 ац)11 р Бк,)к)сннии ирин)ла 4 нас)инаст Вы. В 13)3 и 3 ть 51 иа 1 с 1 ики 19 Бинт 1, ч к)торОГО ЧС)Ь)И И сСН 1 )(И 5, )ЕЧ Ч ЛруИ,С ВИН гов 4 и 15 Вывинчиваясь, езинт 16 нерече. )ц;ется Вниа 1 ри аточ кольцевой бурт 22 Бинта 1 кцитс кисг с Внтрснней оверк. )нкппью ООГь)с го Бинта 15. В конце своего исрсченения жсс кис вь)ст ны 23 бурта 22 1)И НТ 1 1 13:)с 3;1(,сС ЧК)т С ЖЕС Тк Р) М И ВЫГ И с) ИБС)с БКИ ). П рИ ЯТОЧ ОСТЯ На В. Г 111 си.тс 51 1)р;1 нсни(.с)ики 19, жс стко зякренленнцй Б,утри )яига 15 Винт 15 начинает, Б СВОХ) О 3 СРЕЛЬ, Г)сК ВЫВИНЧИВЯ 1...
Промышленный робот

Номер патента: 1098787
Опубликовано: 23.06.1984
Авторы: Боровитченко, Каширин, Столповский, Стрелкова, Шаблинский
МПК: B25J 9/00
Метки: промышленный, робот
...фиг. 1; на фиг, 3 - разрез Б - Б на фнг. 2; на фиг. 4 - разрез В - В на фиг. 3; на фиг. 5 - разрез Г - Г на фиг. 4.Промышленный робот состоит из основания 1, к которому крепится механизм 2 поворота с закрепленной на нем шлицевой колонкой 3, на которой посредством шлицевого соединения установлена траверса 4, связанная с приводом 5 механизма 6 вертикального перемещения с помощью штока 7 и пальца 8.На траверсе закреплены механические руки 9 с захватными устройствами 10. К основанию крепится силовой блок 11, обеспечивающий подготовку и подвод к механизмам робота сжатого воздуха, и блок 12 стыковки, связывак)щий механизмы робота с системой программного управления (не показано). На шлицевой колонке 3 и траверсе 4 выполнены параллельно шлицам...
Схват промышленного робота

Номер патента: 1098788
Опубликовано: 23.06.1984
Автор: Андреев
МПК: B25J 15/00
Метки: промышленного, робота, схват
...диапазоне размеров, например, 45от 3,5 до 113,5 мм от приводной рейки к центру схвата и состоит из вертикальных осей 2 с зажимными элементами 3, смонтированных на поворотных рычагах 4, с возийж постыл вращения, осей 5, шестерен 6 и 7, приводной рейки 8 и пневмо-.или гидропрпвода 9. Зажимные элементы 3 выполнены, например, в виде съемных роликов и выступают из корпуса 1, Шестерня 6 и поворотный рычаг 4 укреплены на оси 5, которая смонтИрована на шарикоподшипниках в корпусе 1.При перемещении приводной рейки 8 происходит поворот шестерен 7 и 6, вертикальные оси 2 с зажимными элементами 3 расходятся от центра схвата или сходятся к центру схвата, осуществляя разжим или зажим цилиндрических деталей. Другая кинематическая цепь обеспечивает...
Схват промышленного робота

Номер патента: 1098789
Опубликовано: 23.06.1984
Авторы: Иванов, Карягин, Тотокин, Шелепеев
МПК: B25J 15/00
Метки: промышленного, робота, схват
...на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 2,Схват промышленного робота содержит рейку 1, на которой установлена подвижная губка 2, перемещающаяся по направляющей 3, неподвижной относительно рейки 1. В центральном положении губка 2 жестко фиксируется толкателями 4 и 5, размещенными внутри сухаря 6 и подпружиненными с помощью пружин 7 и 8, Толкатели 4 и 5 соединены через соответствующие тяги 9 и 10 с микровыключателями 11, 12 и 13, 14, расположенными в корпусе 15, установленном вне зоны захвата. Захватываемая деталь 16 удерживается с помощью захватных рычагов 17 и 18, снабженных губками, и рейки 1 с губкой 2. Сухарь 6 установлен на направляющей 3. 5 10 15 20 25 30 35 40 45 50 Устройство работает следующим образом.При захвате детали за...
Схват

Номер патента: 1098790
Опубликовано: 23.06.1984
Авторы: Елисеева, Моргун, Муратов, Поданев
МПК: B25J 15/00
Метки: схват
...Охват состоит из зажимных губок 1, связанных с корпусом 2 и приводом, имеющим шток 3, двумя коромыслами 4 и двумя шарнирными параллелограммами, каждый из которых образован зажимной губкой 1, поворотными рычагами 5 и 6 и приводным штоком 3, общим для обоих параллелограммов. Коромысло 4 шарнирно соединено одним концом с серединой поворотного рычага 5, длина которого равна двум длинам коромысла, а другим - с корпусом 2. Шарниры коромысел 4 соосно закреп 20 25 Зо лены на корпусе 2, а шарниры поворотных рычагов 5 и 6 соосно закреплены на штоке 3.Зубчатые секторы 7 и 8 установлены с помощью осей 9 и 10 на подшипниках 11, закрепленных на двух кронштейнах 12, размещенных по торцовой части зубчатых секторов. Эти кронштейны жестко закреплены в...
Манипулятор

Номер патента: 1098791
Опубликовано: 23.06.1984
МПК: B25J 15/00
Метки: манипулятор
...(не показана), схват 1 с помощью узла пространственной ориентации (блока 4 продольного перемещения, блока 6 подъема, блока 8 поворота и блока перемещения вдоль оси станка на катках 10) выводится в заданную позицию для захвата детали 19, которая расположена в разгружаемом агрегате - в питателе или на станке (не показаны) и зафиксирована там принадлежащими этому агрегату фиксирующими элементами (не показаны), введенными в базовые отверстия детали 19 (не показаны), например зажата в центрах токарного станка. При этом в рабочую полость а неподвижного гидроцилиндра 11 через отверстие 20 подана под давлением рабочая жидкость, в результате чего нажимной поршень 15 находится в крайнем левом положении. Под воздействием усилия нажимного поршня...
Схват манипулятора

Номер патента: 1098792
Опубликовано: 23.06.1984
Автор: Гвоздев
МПК: B25J 15/00
Метки: манипулятора, схват
...- взаимодействие наружных поверхностей эксцентрика и стержня (расцепленное и сцепленное состояние).Схват манипулятора содержит корпус 1, в котором расположен привод (не показан), поворачивающий рычаги 2 вокруг осей 3, Губки 4 выполнены полыми, внутри их расположены все механизмы схвата. Рабочие стержни 5, подпружиненные пружинами 6, расположены в крышке 7(фиг. 3). В этой же крышке выполнены отверстия, в которых находятся эксцентрики8 и приводные шестерни 9, расположенные5 на обшей оси. На наружной поверхности10 эксцентрика 8 и на наружной поверхностистержня 5 выполнены профили стандарт.ной резьбы (возможны также выполненияна одной из упомянутых деталей канавок,1 о а на другой - выступов), Шестерня 9 припомощи рейки 11 связана с поршнями...
Пневматический захват

Номер патента: 1098793
Опубликовано: 23.06.1984
Авторы: Дмитриенко, Османов
МПК: B25J 15/06
Метки: захват, пневматический
...фиг. 1 изображен захват с деталью, разрез, общий вид; на фиг. 2 - захват в процессе установки детали,Захват содержит корпус 1 с подпружиненным стержнем 2 с каналом 3 для подвода воздействующего на деталь 4 сжатого воздуха, подпружиненную относительно корпуса кольцевую камеру 5, установленную свободно, Выходные участки 6 канала 3 расположены равномерно по окружности. 5 30 15 20 25 30 35 40 45 50 55 Корпус 1 снабжен равномерно расположенными по окружности каналами 7 с выходными участками 8 для подвода через распределитель (не показан) сжатого воздуха в полость кольцевой камеры 5.Позицией 9 обозначена базовая деталь типа вала.Захват работает следующим образом, Деталь 4 захватывается путем введения стержня 2 захвата в ее отверстие или...
Герметичный манипулятор

Номер патента: 1100080
Опубликовано: 30.06.1984
Авторы: Гультяев, Лебедев, Мокрушин, Сапожников, Харуев
МПК: B25J 3/00
Метки: герметичный, манипулятор
...орган манипулятора располагается в камере пониженного давления; задающий - в операторском помещении, Герметичный чехол3 плотно прилегает к исполнительномуоргану 2 в его нижней части и к опо"ре 5 со стороны камеры, защищая отагрессивных веществ руку манипулятора и операторское помещение,Труба связующего органа 4 снабжена герметизирующей задвижкой 6, состоящей из пластины 7 двух рам 8 и 9 и кулачка 10, связанного с рукояткой 11. и кулачка 10, связанного с рукояткой 11. В пластине имеются вырезы, через ко- . торые проходят гибкие связи 12. К пластине 7 крепятся направляющие 13, прижимающие рамы 8 и 9 к пластине 7 с помощью пружин 14.Рамы 8 и 9 (каждая) состоит из двух планок, к которым крепится губчатая резина 15. Пружины 16...
Электромагнитный захват для плоских заготовок

Номер патента: 1100081
Опубликовано: 30.06.1984
Авторы: Прокопик, Тростянский
МПК: B25J 15/06
Метки: заготовок, захват, плоских, электромагнитный
...возможностей захвата.Цель достигается тем, что в электромагнитном захвате для плоских заготовок, содержащем корпус с проточкойна рабочей поверхности, катушку питания, размещенную в проточке корпуса, и:систему управления перемещени"ем корпуса, в корпусе над катушкойпитания выполнен Ааз, между пазоми катушкой питания выполнена сквознаяпрорезь, захват снабжен пластинойиз немагнитного материала, установленной в пазе корпуса, и связаннымс пластиной и установленным с воэможностью перемещения вдоль оси захватагерметизированным магнитоуправляемымконтактом, подключенным к системеуправления.Кроме того, захват снабжен наполнителем из немагнитного материала, рамещенным в прорези.На фиг. 1 изображен захват, общийвид; на фиг. 2 - то же, вид...
Микроманипулятор
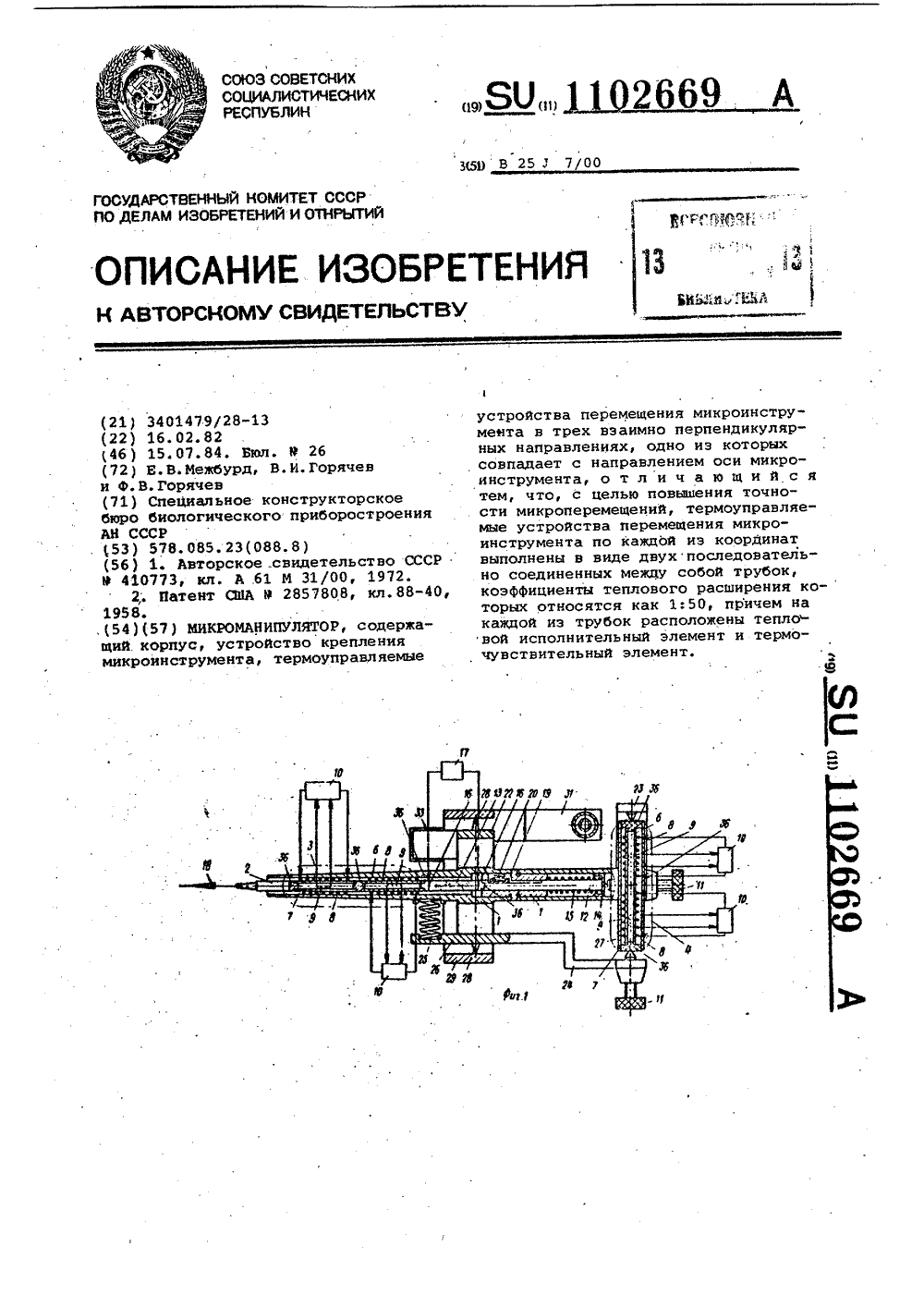
Номер патента: 1102669
Опубликовано: 15.07.1984
МПК: B25J 7/00
Метки: микроманипулятор
...5пружиной 20.Корпус 1 микроманипулятора с закрепленным в нем устройством 3 осевого перемещения через безлюфтовыешарниры 21 1 см. Фиг. 2 и 3) соединен 10с подвижной рамкой 22 см. Фиг. 1,2 и 3).Термоуправляемое устройство 4 вертикального перемещения установленомежду кронштейном 23, прикрепленнымнеподвижно к корпусу 1, и кронштейном 24, прикрепленным неподвижно крамке 22. Возвратная пружина 25 закреплена между планкой 2 Ь, прикрепленной к подвижной рамке 22, и корпусом 1.Жтройство 4 вертикального перемещения закрыто тепловыравнивающим экраном 27.Подвижная рамка 22 через безлюфтовые шарниры 28 см. Фиг. 1,3) соединена с неподвижной рамкой 29, 25Термоуправляемое устройство 5 горизонтального перемещения установлено между кронштейном 30,...
Самоустанавливающаяся головка робота

Номер патента: 1103980
Опубликовано: 23.07.1984
МПК: B23P 19/10, B25J 15/00
Метки: головка, робота, самоустанавливающаяся
...углового положения 2 О штока 12, состоящий из электромагнитов 29 и 30. Электромагнит 29 состоит из сердечника 31, обмотки 32, Электромагнит 30 закреплен на конце штока 12 и содержит сердечник 33 и обмотку 25 34. Электромагнит 29 без зазора сопряжен с корпусом 23 и имеет возможность вертикального перемещения. Четыре пружины 35 являются возвратными. Сферический подшипник 36 сопряжен с ЗО корпусом 23 по посадке с натягом и беззазорно сопряжен со штоком 12, а в осевом направлении зафиксирован стопорными кольцами 37. Электромагнит 29 имеет вогнутую сферическую поверх-з ность, а электромагнит 30 - соответствующую ей выпуклую, центр сферической поверхности совпадает с центром подшипника 36. Пружины 38 предназначены для центрирования корпуса...
Манипулятор

Номер патента: 1104015
Опубликовано: 23.07.1984
Авторы: Аданаков, Банников, Бауэр, Дуда, Машканцев, Спирин
МПК: B25J 5/00
Метки: манипулятор
...3 Р(13:3130,К"3 и З сротсгььх и монзжпцх работ."( 3 (ч с 330)ОИь 0 л 3 х ИОБОнтпх тЯГ о и 6г ) С 3;10 3, 1 с 3) З И с 11, 113 1 1 С Г 11 3 51 р Ч К 0 51 Т 1 7 . Р Ы;И 1, 30 оро 3 ПЫС Г 5 ГИ с) И ) 3 ИСОЛИТСЛЬ 31 р ) К 0511 ьО брс 1.3) 1 О 31(СХс низ 51 сС 611 п(1 ап)10, БисЙ 3 И)3) сРсс 33113 с 1 Оки кРсп- , 3(Н И 51 Рс 601 С 0 0 Рс 13 с 3 8, С, ПО 50 П 1 К) 1 СХ(.- СКОИ 1 ССКО 0 1 И,РОПР 1 ОЛЗ,) ПСРСМ(.ПСИ 51 3 сОлпи гсхпИОЙ р) к 05 ти 7 ря 1 сГсБ 513 ан (.0 сгойкой 1) УирасСие стрсгп)й 3 и рукояГ 1 О 7 Ос) и с с 1 13,1 ясс 1 ся и;цн)пиг 1 и плрсх 33 1 1 и 1".,1030)итс,п,1,й ги,ц)оилиндр 12 ук)спгси 3 с рь 1 с 11 с 1. 11 ОБОр(п рс 60 с 0 ОрГз 3 сртк 331 ьной пгоскоси Ос)и 3,сстнл 53- ст(53 чсхзизмом, сосп)яни л из гилрснилинл- Р;3 1...
Модуль манипулятора

Номер патента: 1104016
Опубликовано: 23.07.1984
Авторы: Березовик, Лукьянович
МПК: B25J 11/00
Метки: манипулятора, модуль
...1. () сС5 1 .Жи)014 1;) с ЯК,: ИС сН)й 1 КЛБс 3 И И 3)- 1(,11)(33 Н(1 Я .1333,1 ИЯ )б(и )с,(ь 31(А - ,4 кгор(4 с иочп(1 к ис)трчбк 3 )сс К Ж ( Н. 1(с Н С НН И )с ИН Ь) И 314(13 Г 3 . ;3 К;с.(о И:),034( Й И "1 С(С)3 ЛСКТ)ОЛ СЭ, :И(сЬЬ 1 Й (,10(Ч .(ИБГПК Г) Ик 1 1, Тс 1 К сКС Кс(К 11 сонр)1 ж(Н 1(ыи ( нич 3,с ктро,(, имк)(пий- С 5: ( С 1( 13 с 1 Н И И, У, И. , ) О И ЗО, 113 ) 0 4 с) 13 13 Ь 1 Й ОТ Н 10.(Я 0)0) 12, И) Ис(С ) )СЖНЛС КТ)ОЛН 1,(й нр( квиток 13 33 К,1 нсн Нлс ктрореолс И 1КОИ Ж ИЛКс ГЬК).Ч 0,1. (Ь К(с)ИИс,(511с )4(Н (П(ЛЛсс К)- И(И 0(Р,) ОМ.51;Н(с(, Ии с(53 С 1 (НСН Ь НО,(НИЖНГИ )(- с 3,(ИЗЧСТС 51 Н)и Н(,(с(С )с) б 11 С)сЛ(Л ИОЛ .с 13,3(ИИС, 1с)СЛ Нс 4)КОК 8 4 3 И)с 1 Ь 1 ИЙ ) и)ч(олсфо)ч)(рс мь 1 и э,)с:снт ). С 3 ИНо)сН 1...
Очувствленный схват промышленного робота

Номер патента: 1104017
Опубликовано: 23.07.1984
Авторы: Березовик, Дубовский, Самсонов, Фещенко
МПК: B25J 15/00
Метки: очувствленный, промышленного, робота, схват
...р)сцоложс)3)пх со- ОТВС ТСТВСЦ)Н) НРОТИЕ 3 СГЬРС Х ГРс 1 НСЙ П)ОДМИ- ,ы 11 озицисй 28 обоцс)чсч) зяхвдтывдемый оси,( кт. 1 я ры )зп 1 выполс цы 3)3 гу нн 24 , Г 3 Я 01 Р с 1 )1(11151 ЦЕ РСХ(.13 С 111 Я с И3 с),З 3(ГР ИРС Кс)5 1 К-.ХС)13 Р;3( ГК 1 сигналов т лдтчикз усилий (ф. 2) со,(р жпт сх ччдтор 25, пер 3 с, вт(р(к и тр(тьс вычитдюцие уТрой(и вд 26-28 (н)п ве Гтвенно и задакпцсс х( рво 29, вы;сЛ КОТОРОГО СВ 5)ЗЯН ОЛНИЧ И 3 ВХО;1 Ов ВЬ 1 И) 310- пц Го устройива 28, 3 рй вход корог сос, И)1 сц с ы холом с 51 13 оря 20, 1 ср)3 ы Й Вх кооро 0 сосли)с ц с ф(Гприсм)(иком 19 и ,ним из Входов 3)читя:ОНЕ(10 (три(.Тв;3 2(, 3)ороЙ Вход сприсик 20 И С 3 ОРЬ М ВХО,ОХ 1 ВЬ)13 И Д К) Ц(С О ЧСТРОЙСТ. вд 2(, тнТИЙ Вхо; фог;н)рисх)иком 22 и о,цич из...
Схват манипулятора

Номер патента: 1104018
Опубликовано: 23.07.1984
Автор: Гвоздев
МПК: B25J 15/00
Метки: манипулятора, схват
...с внутренней поверхностью гиль- З зы силового цилиндра.Кроме того, на наружной поверхности башмаков и на внутренней поверхности гильзы выполнена винтовая нарезка.На фиг. 1 изображен предлагаемый схват, общий вид; на фиг. 2 - узел 1 на фиг. 1.40Схват манипулятора содержит корпус 1 с крышкой 2, в которой выполнено отверстие 3 для подвода рабочей среды во внутреннюю полость. На образующей полость поверхности 4 выполнена стандартная резьба. Анало гичная резьба выполнена на башмаках 5, шарнирно связанных с подпружиненными пружиной 6 рычагами 7 и 8 шарнирно связанными с тягой 9 и далее с шарнирным чечырехзвенником, выполненным из пар звеньев 10 и 11. В месте сочленения этих пар 50 уста новлены ролики 12, подпружиненные пружиной...
Захват промышленного робота

Номер патента: 1105304
Опубликовано: 30.07.1984
Авторы: Мелентьев, Муллахметов, Торощин, Точилкин, Филатов
МПК: B25J 15/02
Метки: захват, промышленного, робота
...при этом один из концов каждого змеевидно изогнутого упругого элемента жестко закреплен на неподвижном элементе, а другой в месте крайнего перегиба ленты образует замкнутый контур.На чертеже изображен предлагаемый захват промышленного робота.Захват, смонтированный на руке 1 промьппленного робота, имеет приводной механизм 2 с неподвижными направляющими 3 и упругую гибкую ленту 4, сое диненную средним перегибом 5 со штоком б приводного механизма. Крайние перегибы 7 упругой ленты 4 являются губками захвата. Между неподвижным элементом 3 и упругой лентой 4 установлены симметрично относительно продоль. ной оси захвата два змеевидно изогнуВНИИПИ Заказ 5435/9 Фипиал ППП "Патент", г,тых упругих элемента 8, концы которых направленные к...
Манипулятор

Номер патента: 1106652
Опубликовано: 07.08.1984
МПК: B25J 9/00
Метки: манипулятор
...в оси 16 валу7, одним концом соединенном с двигателем 18, а другим с одноступенчатым коническим зубчатым редуктором 19, на выходном валу которого смонтирован привод 20, выходным валом соединенный с инструментом 21. 5 10 15 20 25 30 35 40 45 50 Манипулятор работает следующим образом.Для обеспечения горизонтального пере. мещения плеча 4 с предплечьем 6 механизм поворота, размещенный в основании 1, обеспечивает вращательное движение поворотной платформе 2, а шарнирно сочлененные с ней плечо 4 и его привод 3 качания обеспечивают возвратно-поступательное перемещение шарнирно сочлененного с ними предплечья 6, которое за счет привода 5 его качания может совершать перемещение в вертикальной плоскости смонтированного на нем инструмента 21....
Механизм прямолинейного перемещения

Номер патента: 1106653
Опубликовано: 07.08.1984
Авторы: Бабич, Голышков, Смирнов
МПК: B25J 9/00
Метки: механизм, перемещения, прямолинейного
...конце полого вала и свя 25 зана с торсионом посредством пальца.На фиг, 1 представлен механизм прямолинейного перемещения, общий вид; на фиг. 2 - разрез А-А на фиг. 1.Механизм прямолинейного перемещения содержит корпус 1, в который на подшипниках 2 установлена вал-шестерня 3, связанная с двигателем 4 и находящаяся в зацеплении с зубчатыми колесами 5 и 6, установленными на валу 7, причем зубчатое колесо 6 жестко связано с валом 7, а зубчатое З 5 колесо 5 свободно сидит на валу 7 и связано квадратным отверстием 8 с квадратным концом 9 торсиона 10, расположенного внутри вала 7, а другой конец торсиона 10 связан с втулкой 11, имеющей квадратное отверстие. Втулка 11 расположена в шестерне 12; во втулке 11 установлены пальцы 13,...
Рука манипулятора

Номер патента: 1106654
Опубликовано: 07.08.1984
Авторы: Каражас, Моцонелидзе
МПК: B25J 11/00
Метки: манипулятора, рука
...этих гибких элементов.На чертеже представлено предлагаемое устройство.Рука манипулятора содержит выдвижную часть 1, на которой через промежуточную втулку 2 закреплен цилиндр 3 с полым штоком 4, имеющий шпоночный паз. Втулка 2 и цилиндр 5 привода схвата содержат шпонки 6 и 7. Щиток цилиндра 5 воздействует на схват 8.Полый цилиндр 9 из упругого материала (например, вакуумной резины) соединен привулканизированными к нему втулками 10 с цилиндром 5 привода схвата 8 и с промежуточной втулкой 2,Втулки 10 связаны между собой тросиками 11 одинаковой длины. Рука манипулятора содержит параллельную выдвижную скалку 12, отверстие в которой соединено с рабочей полостью цилиндра 3 трубопроводом 13.Рука манипулятора работает следующим образом,При...
Промышленный робот

Номер патента: 1108005
Опубликовано: 15.08.1984
Авторы: Великович, Зыбенков, Козырев, Круковец
МПК: B25J 9/00
Метки: промышленный, робот
...на первом звене механической руки, и кинематически связанным с ме. ханизмом компенсации, причем рычаг связан с ползуном.Механизм компенсации выполнен в виде зубчато-реечной передачи, при этом входное зубчатое колесо этой передачи связано с приводом качания головки.На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. .Промышленный робот содержит траверсу 1, установленную на колоннах 2, по которой перемещается каретка 3, несущая механическую руку 4. Последняя состоит из ползуна 5, на конце которого крепится кронштейн 6 качающего рычага 7, смонтированного в подшипнике качения на кронштейне 6. На конце рычага 7 в подшипниках качения смонтирована головка 8, в которой установлен...
Механическая рука

Номер патента: 1110623
Опубликовано: 30.08.1984
Авторы: Болотин, Корендясев, Саламандра, Тывес
МПК: B25J 9/00
Метки: механическая, рука
...в пределах этого зазора, при этом механизм выдвижения упоров-фиксаторов выполнен в виде кулачка, закрепленного на выходном элементе индивидуального привода, и толкателя, закрепленного на упоре-фиксаторе.На чертеже представлен вариант кинематической схемы механической руки.Рука представляет собой плоскуку цепь шарнирно соединенных с основанием и между собой звеньев 2-4 и содержит приводные кицематические цепи 5-7,.выполненные в виде гибких звеньев, например тросов, индивидуальные приводы 8-10 звеньев,5 10 15 20 25 30 35 2-4 соответственно, ца выходных валах которых закреплены кулачки, в виде ролика 11 и штанги 12, на которой с возможностью регулирования установлена вилка 13, аккумуляторы механической энергии, например, в виде пружин 14,...
Манипулятор с цикловым управлением

Номер патента: 1110624
Опубликовано: 30.08.1984
Авторы: Болотин, Корендясев, Саламандра, Тывес
МПК: B25J 9/00
Метки: манипулятор, управлением, цикловым
...дисковсоответственно дифференциалов 13-.-16.Пружинь. 21, устац(гвленные между основанием и каждым кодовым диском 19, подпружицивак)т диски в направлении вращения и являются пружинными аккумуляторами механической энергии.Усовершенствование манипулятора с цикловым управлением связано с установкой дополнительно индивидуальных двигателей 22, кинематически связанных с кодовыми дисками и с введением в конструкцию инерционных нагружателей, выполненных, например, в виде маховиков 23, жестко связанных с сателлитами дифференциалов КП.Механизм изменения моментов инерции нагружателей имеет собственный привод, связанный с устройством программного управления, выполненный, например, в виде электромагнита 24, установленного вдоль оси махогике 23,...
Дифференциальный манипулятор

Номер патента: 1110625
Опубликовано: 30.08.1984
Авторы: Воеводин, Жарков, Исаков
МПК: B25J 9/00
Метки: дифференциальный, манипулятор
...МПРс 1 БГ 1 СПР)я, 3 РР)ЧСМ Кс)Ж;)Ос Звсн сос)о)3 из четырех модулей и соеди51 Н ) 3Е 1Х 1 3 Х0 1 с) Р1 0 1 1 1 с)) 1 1 И Р 0 Е)с( К с) Ж ,1Й 30;Ес Г)1 1)К 1 На(Т 11 с) И ПС бо,)СС ДБУХ и("3 ) С3 ) 3с С Т Я ) 3 0 В, 3 С )1 П ) 1 Х Е) Н ( М3,:1 С) Б Б Р Я 1 1 Гв и и 51, (0 сто 51 3 е и х 3 3,е е) 33 3 с) т ссл сй с Р ел У кГ 0 Р с)- 3)1, с) Кс)Ж,1 Ь) И П с 1 Р 1 И Р СОД(РЖ ИТ Н(. Х)(. ПС двух уста(и)псиных па его оси зуочагых )СОГ)СС -1;ЕсСО ИЗВСС)ПЫИ Ман)ЗПХЛЯТОР 1 СГ)30 огряпчсипыс тс хнологичсские возможности 13 СБ 513 И С 1(Чс), )ТО Кс)ЖДЬЙ )ис 1 Р)ИР СВ 513:П 1 30)ько с 050)ой парой узлов вра)цепия, а . ) 3,(Я 1 О и е 131 и Я п с) Р)33 Ре кэ х т 5 щи Й 310 м с и01 Р с И И )С 13 П 0 Й Б СЛ 31 И Н Ы 0 Г 1 РС;3 СЛ 5 Е 1 С 51 М 0 П...
Манипулятор

Номер патента: 1110626
Опубликовано: 30.08.1984
Автор: Бернотас
МПК: B25J 11/00
Метки: манипулятор
...Г.ИзООр с 1 жс.н м 1)и)м.;3 ятор, (и.щий вш; ца фиг. 2 рызрсз ),-) ц фц. 1; ца фиг. 3 вид Б ц фиг. 2.(сц 1 ИГХ,51 ор рс)боТс 1 С 1 С К (Х ОН)1)1 (Н) РЫЗОМ.1 РИ Цйдс 1 ЧС ВОЗДХа осСиТОКО)У 0 Цо,ОСТ 1 .13510 Г)ГО ццлИН.Ц)дН 10 к цо 0)с 1- ц)вс 1 ст ПОВОРОтн У 0 Г)гм.13( 4 но с(.01 с)полк(.1)к кк ,ц ),жи 3 н.3 ц)ыи Вал б цс(05 цно цо:)жим(т(я црмскин 0)1 Г)Всрх, То Цс,С( 1), ССС)Ко .);ААРОН,ЕННИ )с ВаЛХ 6, цхо;1)т(5 срхнсй )О кс кслдчкы 5, жестко 3 крсцлс)к)1) ы цо)юротцой втулке 4, и ш, 6 цн)ярд иется цо часовой стрелке В,нстс с 1)тулкой 4. 1 ри соприкосновении рычаг 8 с регулируемым упором 7 нодпружц 1 с нныи 1)с),1 6 с Рычдп)м 8 и мсханическОЙ рукой 9 нрскры)цает поворот 10 часовой с 1 рслкс. 1 оворогная втулка 4 продолжает ПОВОРОТ Цо...
Схват манипулятора

Номер патента: 1110627
Опубликовано: 30.08.1984
Авторы: Гульванюк, Иванов, Исаков, Никитин
МПК: B25J 15/00
Метки: манипулятора, схват
Захват промышленного робота

Номер патента: 1110628
Опубликовано: 30.08.1984
Авторы: Мелентьев, Торощин, Торощина
МПК: B25J 15/02
Метки: захват, промышленного, робота
...перегибу ленты, причем два крайних перегиба служат губками захвата 11.Однако эта конструкция обладает низкой надежностью работы вследствие того, что при включении приводного механизма губки захвата сближаются на малую величину, которая может обеспечить только слабое прижатие детали.Целью изобретения является повышение надежности работы и увеличение грузоподьемности захвата промышленного робота.Поставленная цель достигается тем, что захват промышленного робота снабжен установленными в крайних перегибах упругой гибкой ленты дополнительными упругими элементами, закрепленными одними концами в одной для каждого перегиба точке на неподвижном элементе приводного механизма, а другими концами - на другой гибкой ленте с интервалами между...
Сустав манипулятора

Номер патента: 1111857
Опубликовано: 07.09.1984
Авторы: Новичихин, Новичихина, Плюгачев, Прокопенко
МПК: B25J 17/00
Метки: манипулятора, сустав
...обцИИ БИ.1; Па фИГ. 2 разр 3 Л-.с), ПЯ фиГ.рабо- ЧСС ПО ОКЦС)Суста)в манипуля Горя сосгоит из звеньеви 2 Звенопредста 3,5 С собой и 2), 313 спо 2 по)с)сРХ, коп),)с 51 ОхватьБЯ Г :3 всцо 1. ЗБСНБ 5 Обпяз) ют иЯровЙ:пярцир, 1 В К Я )КДО 1 131 Х ,Э 3 1(ПСНЫ ЭЯ,1 И Я. Ь 1Ц Э с В 10 Х 1() Ц 0 Э 2 С П РС,1 С,1 СЦ 0 .) Л С КТР 0 Х 12 П И 1 11 сост 05 Н 3 И цз элскт 1)ом я Гитц 011 катъ ик и 3 И ССрдСЧНИКя 4. К)ТХ ПК 3 И(С(ТКО Зс 1 КрСП- лсцы в звеньяхи 2 Гсрдсчникц 4 у тя 3 ОВлсцы Б каркасах кяаупск 3 с Возможцо(тью осевого псремещспия. Например, по скользяцсй поядкс Каждый серде пик 4 имеет на одном торце шестигранную головку 5, которая не зафиксирована в осевом направлении отцосительно звена. ДруГой торец, жестко прикреплен к своему звецм....
Привод манипулятора

Номер патента: 1114544
Опубликовано: 23.09.1984
Автор: Уральский
МПК: B25J 1/02
Метки: манипулятора, привод
...увеличивается в 4,07раза, Кроме того, устраняется неравномерность вращения ведомых валовпривода, что позволяет увеличить точность позиционирования захвата манипулятора, ликвидировать динамическиенагрузки, возникающие вследствие неравномерности вращения, что ведет кувеличению долговечности деталейкарданных шарниров привода, а следовательно, увеличивается надежностьи срок службы манипулятора.В целом, использование изобретенияпозволит расширить область применения шарнирных манипуляторов с электромеханическим приводом,1 1114544 3Изобретение относится к промышленным роботам и манипуляторам и можетбыть использовано для автоматизациимонотонных и вспомогательных опера"ций.По основному авт, св. В 471189 из.5вестен привод манипулятора с...
Рука тензорного манипулятора

Номер патента: 1114545
Опубликовано: 23.09.1984
Авторы: Кутлубаев, Макаров, Пономарев
МПК: B25J 1/02
Метки: манипулятора, рука, тензорного
...тяги, кроме того, требует индивидуального привода к каждой поворачиваемой пластине, поэтому прибольшом числе доворачиваемых пластингабариты и конструкции привода усложняются.Пелью изобретения является упрощение конструкции руки тензорного манипулятора.Поставленная цель достигается тем,что рука тензорного манипулятора, содержащая ряд соединенных между собой универсальными шарнирами звеньев с поперечными пластинами, в которых симметрично относительно осизвеньев выполнены два отверстия дляпрохода тяг, закрепленных на рукеперед первым шарниром со сторонызахвата, снабжена механизмами фиксации звеньев относительно осей шарниров, при этом каждый механизм фиксации снабжен приводом и состоит издвух частей, одна из которых установлена...