Микроманипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
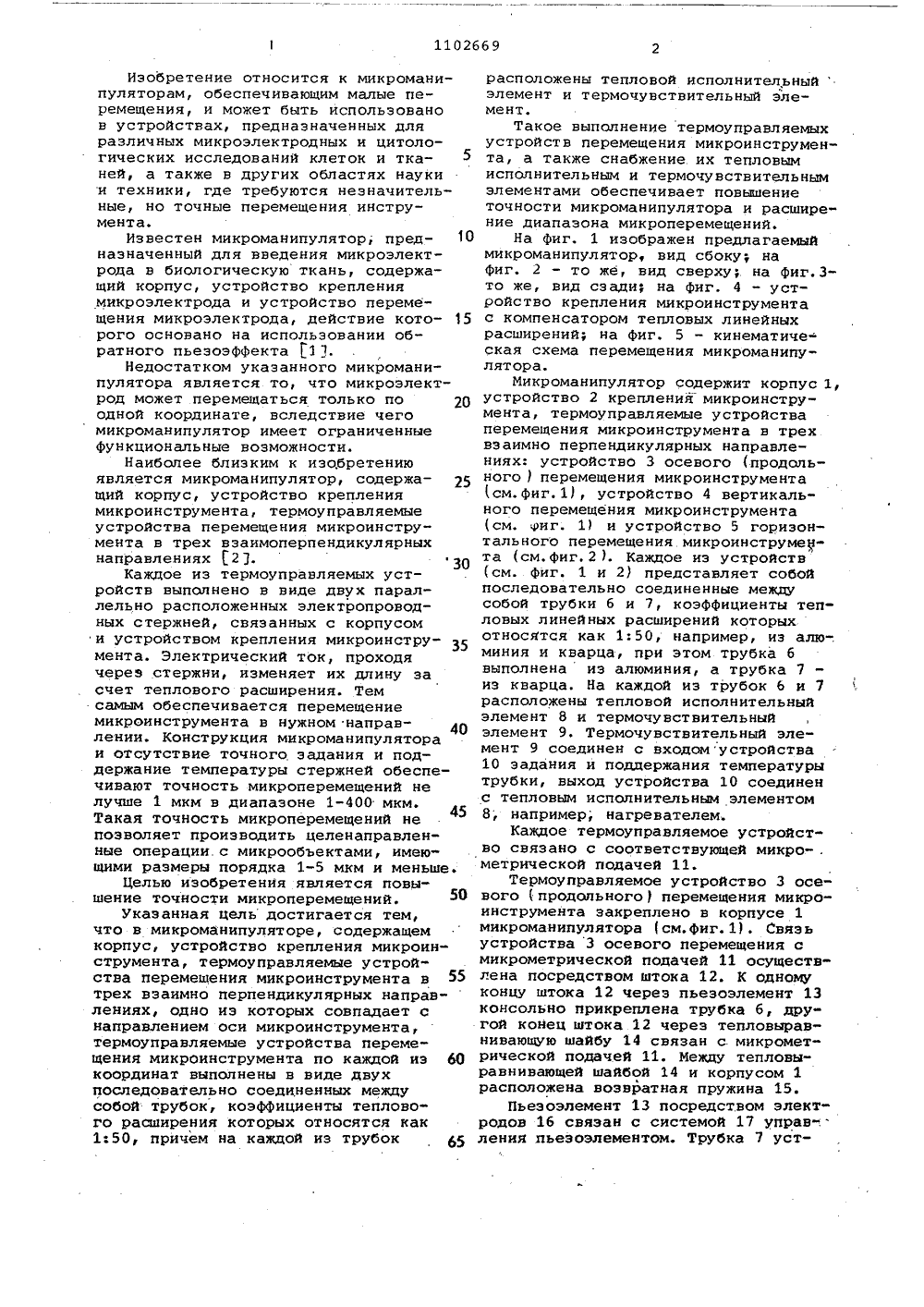
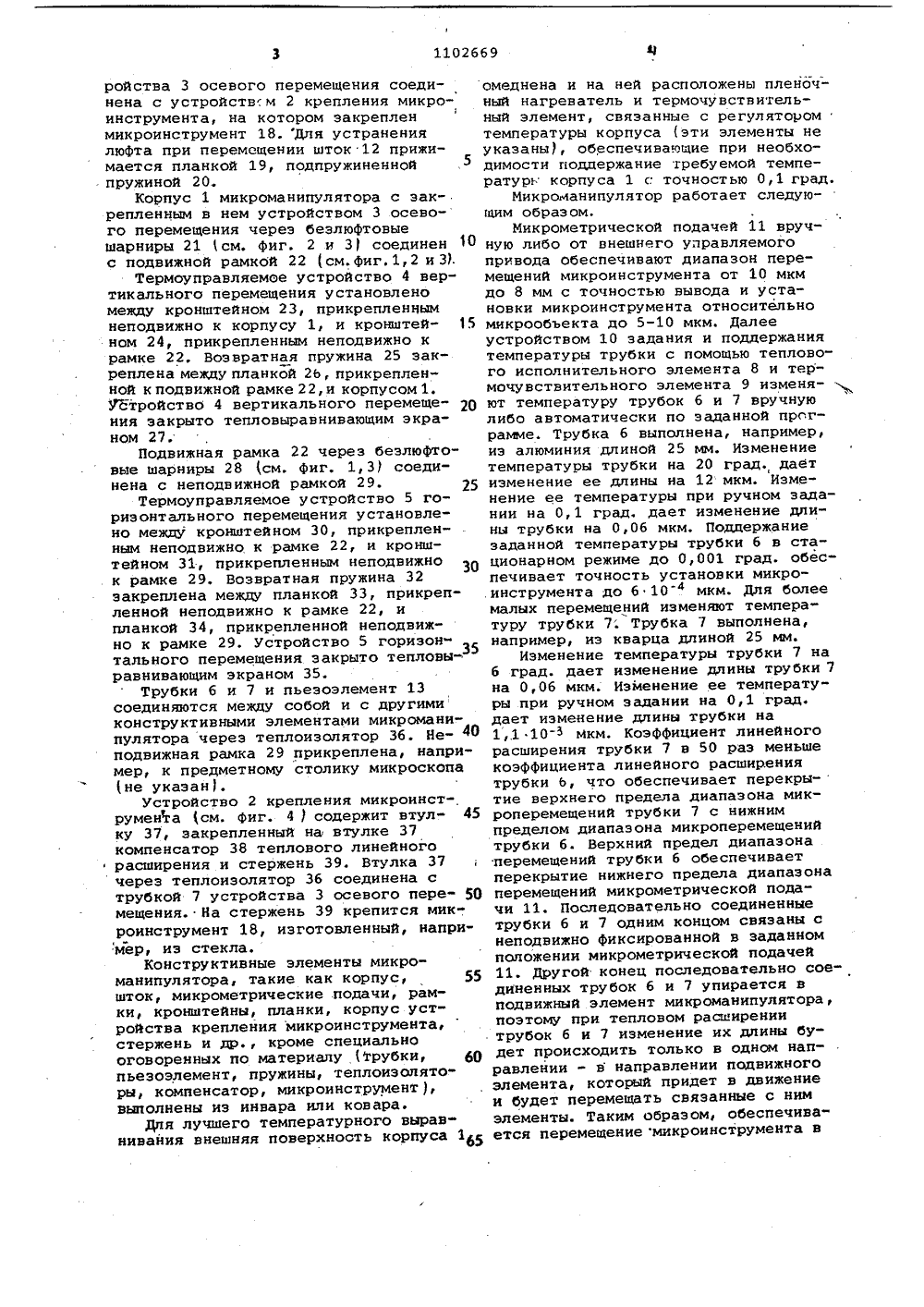
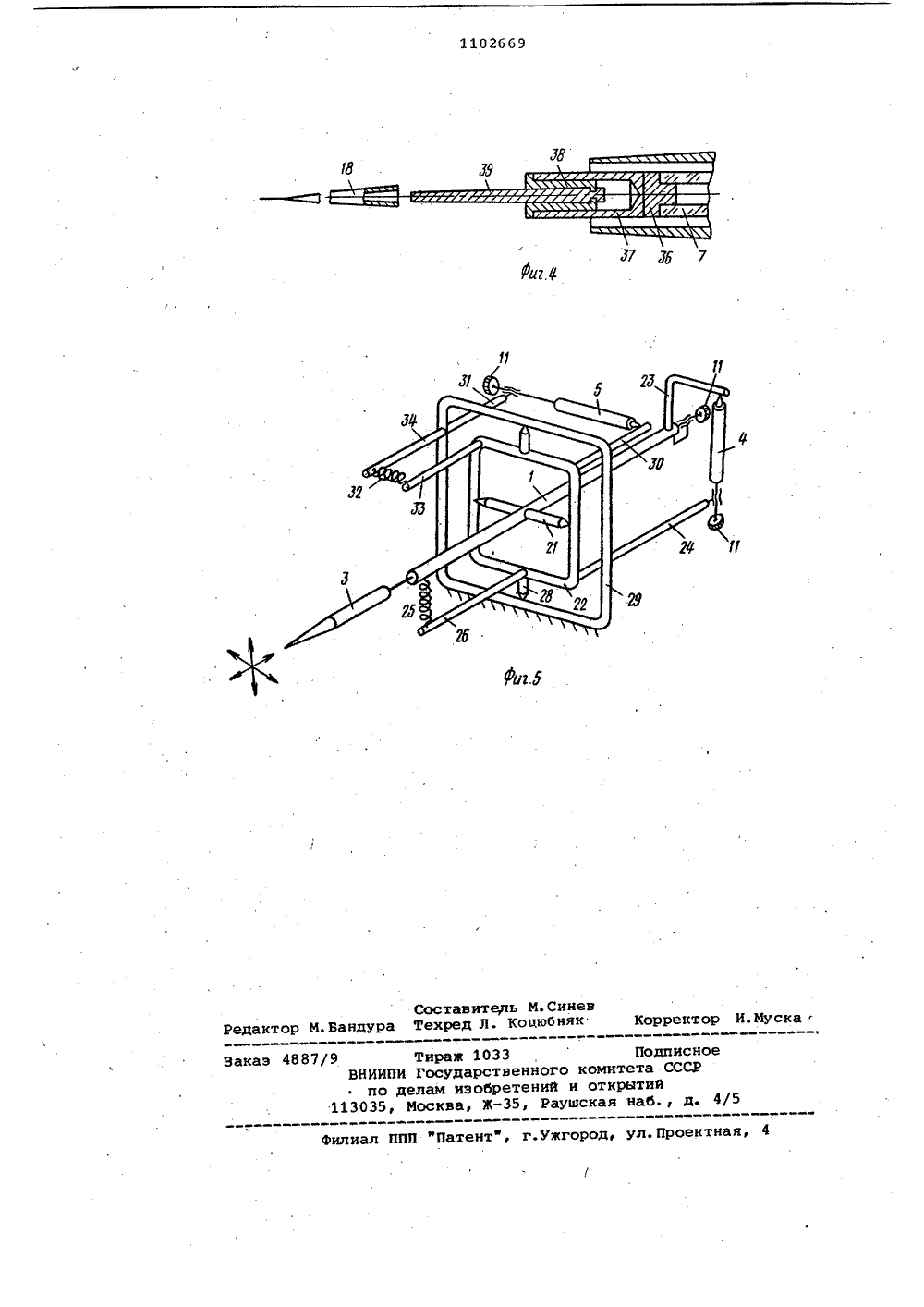
.злей."ЫА ния коем наеплоермоГОСУДАРСТВЕННЫЙ КОМИТЕТ СССОО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(71) Специальное конструкторское бюро биологического приборостроения АИ СССР53) 578.085.23(088.8)(56) 1. Авторское свидетельство СССР М 410773, кл. А .61 М 31/00, 1972.2;. Патент США Р 2857808, кл.88-40 1958., 54) (57) МИКРОМАНИПУЛЯТОР, содержащий корпус, устройство крепления микроинструмента, термоуправляемые устройства перемещения микроинструмента в трех взаимно перпендикулярных направлениях, одно иэ которыхсовпадает с направлением оси микроинструмента, о т л и ч а ю щ и й с ятем, что, с целью повышения точности микроперемещений, термоуправляемые устройства перемещения микроинструмента по каждой из координатвыполнены в виде двух последовательно соединенных между собой трубок,коэффициенты теплового расширеторых относятся как 1:50, причкаждой из трубок расположены твой исполнительный элемент и тчувствительный элемент.Изобретение относится к микроманипуляторам, обеспечивающим малые перемещения, и может быть использованов устройствах, предназначенных дляразличных микроэлектродных и цитологических исследований клеток и тканей, а также в других областях наукии техники, где требуются незначительные, но точные перемещения инструмента,Известен микроманипулятор; предназначенный для введения микроэлектрода в биологическую ткань, содержащий корпус, устройство креплениямикроэлектрода и устройство перемещения микроэлектрода, действие которого основано на использовании обратного пьезоэффекта 1).Недостатком указанного микроманипулятора является то, что микроэлектрод может перемещаться только по 20одной координате, вследствие чегомикроманипулятор имеет ограниченныефункциональные воэможности.Наиболее близким к изобретениюявляется микроманипулятор, содержащий корпус, устройство креплениямикроинструмента, термоуправляемыеустройства перемещения микроинструмента в трех взаимоперпендикулярныхнаправлениях 23.ЗОКаждое из термоуправляемых устройств выполнено в виде двух параллельно расположенных электропроводных стержней, связанных с корпусоми устройством крепления микроинструмента. Электрический ток, проходячерез стержни, изменяет их длину засчет теплового расширения. Темсамым обеспечивается перемещениемикроинструмента в нужном направлении. Конструкция микроманипулятораи отсутствие точного. задания и поддержание температуры стержней обеспечивают точность микроперемещений нелучше 1 мкм в диапазоне 1-400 мкм,Такая точность микроперемещений непозволяет производить целенаправленные операции с микрообъектами, имеющими размеры порядка 1-5 мкм и меньше,Целью изобретения является повышение точности микроперемещений,50Указанная цель достигается тем,что в микроманипуляторе, содержащемкорпус, устройство крепления микроинструмента, термоуправляемые устройства перемещения микроинструмента в 55трех взаимно перпендикулярных направ"лениях, одно иэ которых совпадает снаправлением оси микроинструмента,термоуправляемые устройства перемещения микроинструмента по каждой из 60координат выполнены в виде двухпоследовательно соединенных междусобой трубок, коэффициенты теплового расширения которых относятся как150, причем на каждой из трубок 65 расположены тепловой исполнительный элемент и термочувствительный элемент.Такое выполнение термоуправляемых устройств перемещения микроинструмента, а также снабжение их тепловымисполнительным и термочувствительнымэлементами обеспечивает повышениеточности микроманипулятора и расширение диапазона микроперемещений.На фиг. 1 изображен предлагаемыймикроманипулятор, вид сбоку; нафиг. 2 - то же, вид сверху; на фиг.3 то же, вид сзади; на Фиг. 4 - устройство крепления микроинструмента с компенсатором тепловых линейных расширений; на фиг. 5 - кинематиче- ская схема перемещения микроманипулятора.Микроманипулятор содержит корпус 1,устройство 2 крепления микроинструмента, термоуправляемые устройства перемещения микроинструмента в трех взаимно перпендикулярных направлениях: устройство 3 осевого (продоль" ного ) перемещения микроинструмента 1 см.фиг,1), устройство 4 вертикального перемещения микроинструмента (см. иг. 1) и устройство 5 горизонтального перемещения.микроинструмента (см.фиг.2 ). Каждое из устройств (см. Фиг. 1 и 2) представляет собой последовательно соединенные между собой трубки 6 и 7, коэффициенты тепловых линейных расширений которых относятся как 1:50, например, из алю-. миния и кварца, при этом трубка б выполнена из алюминия, а трубка 7 из кварца. На каждой из трубок 6 и 7 расположены тепловой исполнительный элемент 8 и термочувствительный элемент 9. Термочувствительный элемент 9 соединен с входом устройства 10 задания и поддержания температуры трубки, выход устройства 10 соединен с тепловым исполнительным элементом 8, например; нагревателем.Каждое термоуправляемое устройство связано с соответствующей микро" . метрической подачей 11.Термоуправляемое устройство 3 осевого продольного ) перемещения микро" инструмента закреплено в корпусе 1 микроманипулятора (см.фиг.1). Связь устройства 3 осевого перемещения с микрометрической подачей 11 осуществлена посредством штока 12. К одному концу штока 12 через пьезоэлемент 13 консольно прикреплена трубка б, дру" гой конец штока 12 через тепловыравнивающую шайбу 14 связан с.микромет" рической подачей 11. Межцу тепловыравнивающей шайбой 14 и корпусом 1 расположена возвратная пружина 15Пьезоэлемент 13 посредством электродов 16 связан с системой 17 управ- ления пьезоэлементом. Трубка 7 устройства 3 осевого перемещения соединена с устройств.м 2 крепления микроинструмента, на котором закрепленмикроинструмент 18. Для устранениялюфта при перемещении шток 12 прижимается планкой 19, подпружиненной 5пружиной 20.Корпус 1 микроманипулятора с закрепленным в нем устройством 3 осевого перемещения через безлюфтовыешарниры 21 1 см. Фиг. 2 и 3) соединен 10с подвижной рамкой 22 см. Фиг. 1,2 и 3).Термоуправляемое устройство 4 вертикального перемещения установленомежду кронштейном 23, прикрепленнымнеподвижно к корпусу 1, и кронштейном 24, прикрепленным неподвижно крамке 22. Возвратная пружина 25 закреплена между планкой 2 Ь, прикрепленной к подвижной рамке 22, и корпусом 1.Жтройство 4 вертикального перемещения закрыто тепловыравнивающим экраном 27.Подвижная рамка 22 через безлюфтовые шарниры 28 см. Фиг. 1,3) соединена с неподвижной рамкой 29, 25Термоуправляемое устройство 5 горизонтального перемещения установлено между кронштейном 30, прикрепленным неподвижно к рамке 22, и кронштейном 31, прикрепленным неподвижнок рамке 29. Возвратная пружина 32закреплена между планкой 33, прикрепленной неподвижно к рамке 22, ипланкой 34, прикрепленной неподвижно к рамке 29. Устройство 5 горизонтального перемещения закрыто тепловы"равнивающим экраном 35.Трубки 6 и 7 и пьезоэлемент 13соединяются между собой и с другимиконструктивными элементами микроманипулятора через теплоизопятор 36. Неподвижная рамка 29 прикреплена, например, к предметному столику микроскопане указан).Устройство 2 крепления микроинструменга см. фиг. 4 ) содержит втул-. 45ку 37, закрепленный на втулке 37компенсатор 38 теплового линейногорасширения и стержень 39. Втулка 37через теплоиэолятор 36 соединена струбкой 7 устройства 3 осевого перемещения. На стержень 39 крепится микроинструмент 18, изготовленный, например, из стекла.Конструктивные элементы микроманипулятора, такие как корпус, 55шток, микрометрические .подачи, рамки, кронштейны, планки, корпус устройства крепления микроинструмента,стержень и др., кроме специальнооговоренных по материалу (трубки, 60пьезоэлемент, пружины, теплоизоляторы, компенсатор, микроинструмент ),выполнены из инвара или ковара,Для лучшего температурного выравнивания внешняя поверхность корпуса 165 омеднена и на ней расположены пленочный нагреватель и термочувствительный элемент, связанные с регулятором температуры корпуса (эти элементы не указаны), обеспечивающие при необходимости поддержание требуемой температурь корпуса 1 с точностью 0,1 град.Микро манипулятор работает следующим образом.Микрометрической подачей 11 вручную либо от внешнего управляемого привода обеспечивают диапазон перемещений микроинструмента от 10 мкм до 8 мм с точностью вывода и установки микроинструмента относительно микрообъекта до 5-10 мкм. Далее устройством 10 задания и поддержания температуры трубки с помощью теплового исполнительного элемента 8 и тер- мочувствительного элемента 9 изменя ют температуру трубок 6 и 7 вручную либо автоматически по заданной программе. Трубка 6 выполнена, например, иэ алюминия длиной 25 мм. Изменениетемпературы трубки на 20 град. дает изменение ее длины на 12 мкм. Изменение ее температуры при ручном задании на 0,1 град. дает изменение длины трубки на 0,06 мкм. Поддержание заданной температуры трубки 6 в стационарном режиме до 0,001 град, обеспечивает точность установки микро- .инструмента до 6 10 4 мкм. Для более малых перемещений изменяют температуру трубки 7; Трубка 7 выполнена, например, из кварца длиной 25 мм.Изменение температуры трубки 7 на 6 град. дает изменение длины трубки 7 на 0,06 мкм. Изменение ее температуры при ручном задании на 0,1 град. дает изменение длины трубки на 1,.1 10Мкм. Коэффициент линейного расширения трубки 7 в 50 раз меньше коэффициента линейного расширения трубки Ь, что обеспечивает перекрытие верхнего предела диапазона микроперемещений трубки 7 с нижним пределом диапазона микроперемещений трубки 6. Верхний предел диапазона перемещений трубки 6 обеспечивает перекрытие нижнего предела диапазона перемещений микрометрической пода" чи 11, Последовательно соединенные трубки 6 и 7 одним концом связаны с неподвижно Фиксированной в заданном положении микрометрической подачей 11. Другой конец последовательно соединенных трубок 6 и 7 упирается в подвижный элемент микроманипулятора, поэтому при тепловом расширении трубок 6 и 7 изменение их длины будет происходить только в одном направлении - в направлении подвижного элемента, который придет в движение и будет перемещать связанные с ним элементы. Таким образом, обеспечивается перемещение микроинструментавдиапазоне от 1,1 10мкм до 8 мм с минимальным шагом 1,1 10мкм при ручном задании и точностью задания положения в стационарном режиме до 6 10-4 мкм.Перемещение микроинструмента в трех взаимно перпендикулярных направлениях осуществляется следующим образом (см. фиг. 5).Осевое перемещение микроинструмента обеспечивается устройством 3 10 осевого перемещения. Перемещение устройства 4 вертикального перемещения через кронштейн 23 передается корпусу 1. При этом корпус 1 вращается в шарнирах 21 закрепленных на рам ке 22, Обратный ход корпуса 1 обеспечивает пружина 25, одним концом упирающаяся в корпус 1, а другим- в планку 26, неподвижно закрепленйую на рамке 22. Таким образом обеепечи п вается вертикальное перемещение микроинструмента.Перемещение устройства 5 горизонтального перемещения через кронштейн 30 передается рамке 22. При этом рамка 22 вместе с корпусом 1 вращается в шарнирах 28, закрепленных на неподвижной рамке 29. Обратный ход рамЪ ки 22 вместе с корпусом 1 обеспечивает пружина 32, оцним концом упирающаяся в планку 33, а другим - в планку 34, Таким образом обеспечиваетсягоризонтальное перемещение микроинструмента,С помощью системы 17 управленияпьезоэлементом подается изменениенапряжения на электроды 16, за счетобратного пьезоэффекта будут происходить микроиэменения размеров пьезоэлемента 13, что приводит к микроперемещению связанных с пьезоэлементом 13 трубок 6 и 7 устройства 2крепления микроинструмента и микроинструмента 18, Эти микроперемещенияв зависимости от поступающего сигнала могут быть скачкообразными, одиночными возвратно-поступательными,возвратно-поступательными с различной частотой (вплоть до ультразвуковой ) и амплитудой. Предлагаемый микроманипулятор может быть применен в микробиологических исследованиях для точного введения микроинструмента в объект и точного поддержания положения микро- инструмента относительно объекта.каэ 4887/9 Тира филиал ППП фПатентф, г.ужгород, ул.Проектная, 4 ж 1033ВНИИПИ Государственного компо делам изобретений и от113035, Москва, Ж, Раушска Подписноета СССРтийаб д. 4
СмотретьЗаявка
3401479, 16.02.1982
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО БИОЛОГИЧЕСКОГО ПРИБОРОСТРОЕНИЯ АН СССР
МЕЖБУРД ЕВГЕНИЙ ВОЛЬФОВИЧ, ГОРЯЧЕВ ВЛАДИМИР ИЛЬИЧ, ГОРЯЧЕВ ФЕЛИКС ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B25J 7/00
Метки: микроманипулятор
Опубликовано: 15.07.1984
Код ссылки
<a href="https://patents.su/5-1102669-mikromanipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Микроманипулятор</a>
Устройство для изготовления корпусов цилиндрических щелочных элементов

Номер патента: 902115
Опубликовано: 30.01.1982
МПК: H01M 6/02
Метки: корпусов, цилиндрических, щелочных, элементов
...плита 7, имеющая отверстие 8, расположенное на одной оси с матрицей для вытяжки. Плита установлена на направляющих колонках с возможностью перемещения по ним. На плите смонтирован кольцевой нож 9, состоящий из двух подвижных половин 10 и 11. Половины ножа приводятся в движение, например, с по мощью клина или пружины. Отношение диаметра отверстия С кольцевого ножа в сжатом положении к диаметру венчика пуансона д равно 1,0001 в 1,003. Если отношение- меньше 1,0001, то происходит15 быстрый износ инструмента, если больше 1,003 происходит некачественная обрезка корпусов из-за получения рваных краев корпусов. Устройство содержит также упоры 12.Устройство для изготовления корпусов 20 элементов работает следующим образом.Ронделль...
Виброзадерживающее устройство для пластин корпуса транспортного средства

Номер патента: 477881
Опубликовано: 25.07.1975
Авторы: Иванов, Кирпичников, Кузьмичев, Ляпунов
МПК: B63B 3/70
Метки: виброзадерживающее, корпуса, пластин, средства, транспортного
...пла и достижение виброизоляции пластины в прса отношение высоты пластинчаты тов к длине волны изгибных колепластинчатых элементов (на указа еделе частоты) должно отличаться собой на величину не менее, чем Кроме того, по крайней мере один ертеже схел 1 атически изображенописываемого устройства.477881 10 Составитель Г.1 УмянцевТехред И,Карандашова Корректор Л,Брахнина редактор Т.Шагова Заказ о 4 ГЬ 5 Изд М ЯФ/Тираж 529 Поднысное Ц 11 И 1 ШИ Государственного комитета Совета Министров СССР во делам изобретений и открытий Москва, 113035, Раушская наб 4 Предприятие Патент, Москва, Г 59, Бережковская наб., 24 наклонен к пластине под углом с , непревышаюшим 45 о. Для локализации участков повышенной вибрации пластин корпусавиброзадерживаюшее...
Устройство для очистки корпуса судна

Номер патента: 261194
Опубликовано: 01.01.1970
МПК: B63B 59/06
...а также шестеренчатый насос 10 с гидродомкратом 11.На направляющеи 8 подвижно установлен 5 очистной орган, выполненный в виде корпуса12, на котором на оси 13 установлено приспособление 14 для очистки (например, щетка), кинематически соединенного посредством клиноременной передачи 15 с двигателем 1 б 10 К двигателю 1 б с помощью редуктора (начертеже не показан) присоединена прямозубая шестерня 17, взаимодействующая с рейкой 9. К корпусу 12 на кронштейне 18 прикреплен разгрузочный ролик 19.15 К двигателям б и 1 б подключены источники питания с кнопками управления (на чертеже не показаны).Вместо щетки на приспособлении 14 дляочистки может быть установлен лепестковый 20 валик.Устройство работает следующим образом, При работе двигателя б...
Устройство для контроля прочности крепления обмотки на стержне трансформатора

Номер патента: 371563
Опубликовано: 01.01.1973
Автор: Тумаков
МПК: G05B 23/02, H01F 27/40
Метки: крепления, обмотки, прочности, стержне, трансформатора
...3 подпружиненный сбр асыватель, установлен ный параллельно стопору.На чертеже изображено устройство в разрезе.Устройство состоит из размещенных в корпусе 1 неподвижного 2 и подпружиненного подвижного 3 контактов. Подвижный контакт 3 связан с тягой 4, закрепленной между нажимными пластинами трансформатора. В верхней нажимной плите выполнено два соосных отверстия, разделенных перемычкой,В верхнем отверстии устанавливается стопор 5, который поджимается к перемычке между отверстиями пружиной б. Сверху отверстие закрывается пробкой 7. В нижнем отверстии устанавливается сбрасыватель 8, на который воздействует пружина 9, Отверстие закрывается пробкой 10. Для того, чтобы под действием динамических нагрузок пробки 7 и 10 не вывинчивались, их...
Устройство для очистки корпуса судна

Номер патента: 823216
Опубликовано: 23.04.1981
Авторы: Бутузов, Кузнецов, Пахомов, Хомяков
МПК: B63B 59/08
...балласта на необходимую глубину, в зависимости от осадки обрабатываемого судна 4, и центрируется посредством натяжения тросов 25 и 26 лебедками 28 и брашпилем 27, так, чтобы горизонтальная балка 5 совпала с диаметральной плоскостью судна 4. Рычаги 6 с закрепленными на них поплавками 7 и рабочими головками с очистными органами 22, на электроприводах 21 которых закреплены поплавки 23, под действием грузов - противовесов 10 и положительной плавучести поплавков 7 и 23 повернутся относительно оси горизонтальной балки 5 в вертикальное положение, причем между очистными органами 22 и диаметральной плоскостью судна 4 обеспечивается расстояние один метр путем принудительного разворота на необходимый угол рамок 11 и 12 посредством натяжения...
Предыдущий патент: Стягивающее устройство
Следующий патент: Механизм подачи деревообрабатывающего станка
Случайный патент: Борштанга