B25J — Манипуляторы; камеры, оборудованные манипуляторами
Вакуумный захват

Номер патента: 1576312
Опубликовано: 07.07.1990
МПК: B25J 15/06
...же, в момент схватадетали; на Фиг. 3 - то же, совместнос удерживаемой деталью в позиции,предшествующей ее сборке с другойдеталью, на Фиг,4 - уплотнительноекольцо захвата,Захват содержит корпус 1 с полостью 2. В корпусе 1 установлено уплот Онительное кольЦо 3, выступающее зарабочий торец корпуса 1, Кольцо 3выполнено из упругого материала иимеет переменное сечение, плавноувеличивающееся отд (слева от оси)ЛоВ (справа от оси). Кроме того,кольцо 3 может быть снабжено частичным сужающимся вырезом 4. Захват(Фиг. 2) предназначен для схватадетали 5. снабженной с данной стороны выступом 6, расположенным к нейпод некоторым углом Ы, . Деталь 5,перед взаимодействием с захватом базируется в желобе базового питателя7 и, в конечном счете,...
Механическая рука

Номер патента: 1576313
Опубликовано: 07.07.1990
Автор: Украженко
МПК: B23Q 3/155, B25J 18/00
Метки: механическая, рука
...= (1 - 1)+ 1,где (1 - 1,) - прямолинейный участок;1, - криволинейный участок;1 - номинальный ход поршня штока 7, необходимый для зажима инструмента 21 губкой б;д - запас хода штока 7,необходимый для компенсации различных погрешностей, возникающих при зажиме инструмента 21,Для поддержания ориентированногоположения инструмента 21 на схвате 4имеется шпанка 22, взаимодействующаясо шпоночным пазом в инструменте.Механическая рука работает следующим образом.При подаче рабочей среды в поршневую полость силового цилиндра 8егошток 7 перемещает штангу 3 нарасстояние 1, соответствующее вылетусхвата 4, посредством серьги 10 иролика 16, который упирается в стенку поперечного паза копира 13 штанги 3Во время прохождения расстояния 1 (Фиг, 4) ролик 17...
Манипулятор

Номер патента: 1576314
Опубликовано: 07.07.1990
Автор: Кудрявцев
МПК: B25J 18/00
Метки: манипулятор
...11 и 12, работающих в паре,и направляющий усеченный конус 13,установленный на валу и кинематически "вязанный с приводом 14, Роликпосредством зубчатой передачи 15связан с приводом 10, Кроме того,на механической руке 7 с возможностью перемещения размещены дополнительные направляющие механизмы 16.Дополнительный направляющий механизм16 содержит рамку 17, включающую дванаправляющих усеченных конуса 18 и19, и два Фрикцирнных ролика 20 и 21,При этом конус 18 неподвижно закреплен на рамке 17, а конус 19 закрепленна кронштейне 22, шарнирно связанномс рамкой 17 и кинематически связанномс приводом 23, Фрикционный ролик 21кинематически связан с приводом 24.Манипулятор работает следующимобразом,В исходном состоянии плоская упругая лента 5 намотана...
Механизм прямолинейного перемещения объекта

Номер патента: 1576315
Опубликовано: 07.07.1990
Авторы: Гришко, Иванов, Моргачев, Семенов
МПК: B25J 18/00
Метки: механизм, объекта, перемещения, прямолинейного
...Рычаги 7 имеют на концах внешние 8 и внутренние шарниры 9 и 10. Внешние шарниры 8 соединены планками 1 1 и 12, проходящими через внутренние шарниры 2, Внутренние шарнирь, 9 и 10 связаны планками 13 и 14 с шарнирами 3 и 4В планках 13 и 14 выполнены пазы для шарниров 3 и 4Механизм работает следующим образом.При включении привода получает вращение коническое зубчатое колесо 6, От него приводятся два зубчатых колеса 5, соединенных каждое соответственно с одним из рычагов 1, Зубчатые колеса 5 вращаются в противоположные стороны, а рычаги 1, образующие ромьы, начинают сходиться, увеличивая общий вылет, или расходиться, уменьшая вылет, При схождении стержней внутренние шарниры 2 поступательно перемещаются по общей 5оси. Вместе с ними...
Соединительный модуль сборочного робота

Номер патента: 1577952
Опубликовано: 15.07.1990
Авторы: Воротников, Рунков
МПК: B23P 19/00, B25J 9/08
Метки: модуль, робота, сборочного, соединительный
...блок линейной податливости, а сильфоны 4 образуют блок угловой податливости. Внутри сильфонов 3, 4 устанавливается механизм фиксаций от сдвига фланцев, представляющий из себя стержни 6, 7 закрепленные на торцах 8, 9 соответственно. В стержнях 6, 7 соответственно выполнены каналы 10, 11 для подачи рабочей среды, Б качестве рабочей среды используется жидкость. На свободном конце стержня 7 выполнен конический выступ 12, а на свободном конце стержня 6 выполнена ответная коническая выемка 13. Канал 1 О соединен с выходом 14 трехпозициоиного клапана 15, входы 16, 17 которого соответственно соединены с магистралью низкого давления и магистралью высокого давления. Управление трехпозиционным клапаном 15 ведется с помощью золотника 18....
Самоцентрирующееся запястье робота

Номер патента: 1577953
Опубликовано: 15.07.1990
Автор: Рунков
МПК: B25J 9/08
Метки: запястье, робота, самоцентрирующееся
...7, 8 - графики изменения силы взаимодействия в зависимости от зазора между корпусом и подвижным фланцем.Устройство содержит корпус 1, подвижный фланец 2, катушку возбуждения 3, соединенную с регулируемым источником то ка, постоянный магнит 4, сердечник 5 конической формы. Возможен вариант выполнения устройства (фиг. 3), когда подвижный фланец 2 поджат к корпусу 1 с помощью пружин 6. Возможен вариант выполнения устройства (фиг. 5), когда в корпусе 1 установлено сопло 7, связанное с источником сжатого воздуха, а в подвижном фланце 2 выполнена выемка 8. Устройство работает следующим образом.В исходном положении на катушку возбуждения 3 подается постоянный ток такой полярности, чтобы постоянный магнит 4 вместе с подвижным фланцем 2...
Вакуумный ориентирующий захват

Номер патента: 1577954
Опубликовано: 15.07.1990
Авторы: Гильденфун, Жаботинский, Микрюкова, Можухин
МПК: B25J 15/06
Метки: вакуумный, захват, ориентирующий
...работает следующим образом.Триггер 40 сбрасывается в О кнопкой 42, Устройство подводится к захватываемой детали 55, включается вакуум и деталь 55 втягивается в полость корпуса 3, как это показано пунктиром. От системы управления промышленным роботом выдается сигнал на единичный вход триггера 40, который устанавливается в 1, открывая при этом электропневмоклапан 39 при помощи ключа 36. Сжатый воздух через канал 26 поступает в полость кольцевой камеры 1 и далее по каналам 16 в проточки 17, Под действием сжатого воздуха фиксаторы 5 сжимают пружины 6, выходя из проточек 17. Одновременно единичный сигнал от триггера 40 поступает на входы элементов И 32. На вторые входы элементов И 32 поступают сигналы с датчиков 29, проходя затем на входы...
Устройство шагового перемещения

Номер патента: 1579768
Опубликовано: 23.07.1990
Автор: Флейтман
МПК: B25J 11/00, B25J 9/00
Метки: перемещения, шагового
...3 и от диаметра червячного колеса 5, причем этот угол можетбыть выбран в диапазоне от долей градуса до нескольких полных оборотов,При этом перемещении червяка 3 основной серводвигатель 8 оказывается эастопоренным, так как он подбираетсямаломощным и имеет мягкую характеристику, т,е. его выходной вал не можетповернуть червяк 3.При обратном направлении перемещения червяка 3, например влево (фиг.1,на червячное колесо 5 со стороны червяка 3 не передается рабочая нагрузкаи мощность основного серводвигателя 89768 510 15 20 25 30 35 40 повышения точности позиционирования 5 1 г 7оказывается достаточной для вращениячервяка 3Вращаясь от серводвигателя 8 и линейно перемещаясь от вибратора 2, червяк 3 лищь обкатываетсяпо зубчатому венцу колеса 5,...
Модуль манипулятора
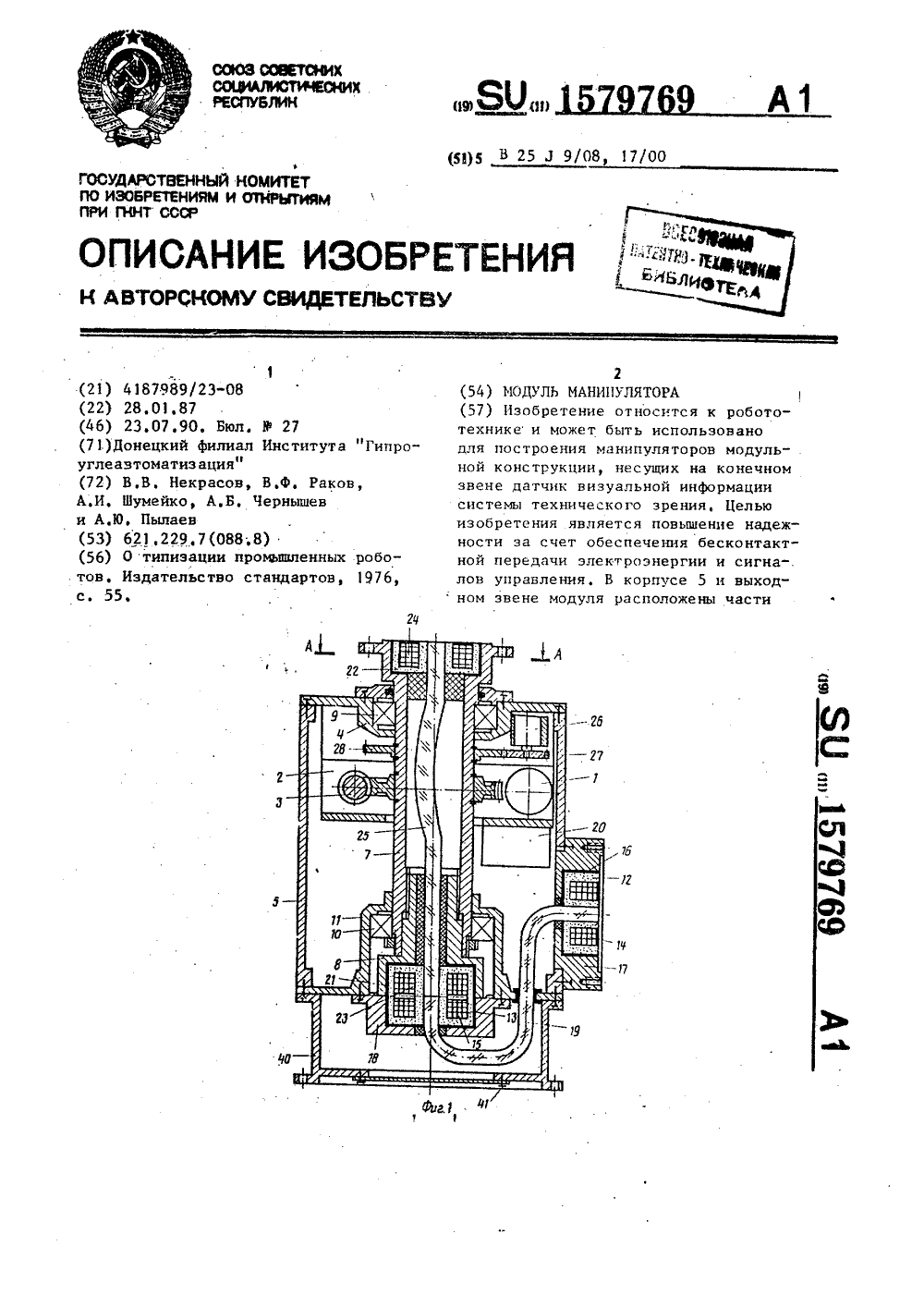
Номер патента: 1579769
Опубликовано: 23.07.1990
Авторы: Некрасов, Пылаев, Раков, Чернышев, Шумейко
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, модуль
...1крутящий момент передается через червячную передачу 3 на полый вал 7,а через зубчатые колеса 27 и 28 движение передается на датчик 26 положения, Части стыковочных узлов соосно состыкованы торцами и вращаютсядруг относительно друга. При этомцилиндрическая форма магнитопроводов13 и 2 обеспечивает непрерывную передачу электроэнергии при взаимномвращении выходного звена 6 и корпу.са 5. Аналогично световой (оптический ) сигнал от узла 38 через совмещенные торцы световодов 25 и 19 по-.ступает на вход модуля и вводитсяв кабель связи через стыковочныйузел 39.Конструкция модуля обеспечивает 45возможность и обратной передачи какэлектрических, так и оптических сигналов,.поэтому каждый из внешних стыкованных узлов может быть как входом,так и...
Устройство для управления приводом робота

Номер патента: 1579770
Опубликовано: 23.07.1990
МПК: B25J 13/00
...11 аг1 а определяются моменФны де яна поворотный привод, которые имеют5(3) эффициен риведеннь моментныи кдвигателя,к валу нагркоэффициентприведенный отивоЭ валу нгрузки;момент инерции ротордвигателя и редукторприведенный к валу.грузки;передаточные отноше1редуктора;К, - коэффициент усиленияпервого усилителя;Р. - символ дифференцировния;,К - активное=11 г. а.а,ния сагротивле ниеепи;ость якорной. индуктивнцепи. Для обеспечения инвариантности электропривода поворота к изменяющимся параметрам нагрузки необходимо, чтобы он всегда описывался передаточной функцией с постоянными параметрами. Для этого в прямую цепь электро- привода достаточно включить корректирующее устройство, параметры которого допускали бы требуемую непрерывную подстройку при...
Способ управления роботом

Номер патента: 1579771
Опубликовано: 23.07.1990
Авторы: Айзенберг, Гейшерик, Львов
МПК: B25J 13/00, B25J 9/16
Метки: роботом
...участках отслеживания) являются опорными точками траектории движения и вносятся в память системы управления.При формировании программы движения таким образом оператор в полуавтоматическом режиме задает опорные точки траектории движения исполнительного органа, а также подает сигналы на начало и окончание автоматического5 157 режима адаптивного отслеживания, назначает начальную и конечную точки и программные параметры движения на каждом иэ участков отслеживания. Соответствующая. информация накапливается в блоках 3 и 4. При управлении роботом от блока 3 на этапе воспроизведения управляющей программы осуществляется аналогичное отслеживаниесоответствующих участков поверхности объекта. При этом для целей управления не требуется никакой...
Задающее устройство для управления манипулятором

Номер патента: 1579772
Опубликовано: 23.07.1990
Авторы: Бойко, Жирнов, Лопаткин, Нацвин, Павлова, Тютчев
МПК: B25J 13/02, B25J 19/00
Метки: задающее, манипулятором
...операционном усилителе 21.Таким образом, перемещая рукоятку от 0 до 1 О (или прикладывая уси - лие от 0 до 25 Н) оператор проходит через несколько режимов работы устройства: 1 - эона нечувствительности,где оператор начинает "чувствовать" на" правление движения, участок "Оа" кривой зависимости выходного сигнала; П - режим микроперемешения (режим точного позиционирования рабочего инструмента), участок а-Ь кривой;111 - изометрический режим формирования команд управления (режим управления маршевой скоростью),участок Ь-с кривой зависимости выходного сигнала.При этом, если в начале обучения предпочитают работать или в середине участка а-Ь кривой зависимости выход" ного сигнала, те. в режиме микро- перемещения, или на участке Ь-с, т.е....
Захватное устройство

Номер патента: 1579773
Опубликовано: 23.07.1990
Автор: Дунаенко
МПК: B25J 15/00
Метки: захватное
...паза,выполненного на частях 8 или 11, азатем ввинченного в резьбовое гнездоводила 12. На частях 8 или 11 рыча-гов по скользящей посадке надеты накладки 14 и закреплены болтами. Накладки 15 в виде носка на. части 11также надеты и зафиксированы штифтами 16 по скользящей посадке, а закреплены болтами 17 так, что головкаи гайка болта предотвращают выпадание штифта,Рабочая поверхность накладок 14и 15 выполнена по форме и размерамзахватываемой детали 18, В зависи-,мости от обслуживаемых деталей на50частях 4 закрепляют части 8 или 11рычагов, а на них - соответствующиейакладки 14 и 15.Захватное устройство работаетследующим образом.Для захвата деталей типа валов тяга 2 перемещается вниз и части 8рычагов раскрываются, Затем тяга 2 перемещается...
Схват

Номер патента: 1579774
Опубликовано: 23.07.1990
Авторы: Афонцев, Калиниченко, Тихоненков
МПК: B25J 15/00
Метки: схват
...и смещения относительно стержня и ориентирующих губку относительно захватываемой детали. На губках 13 могут быть выполнены или приз матические, или зубчато-пилообразные 55 поверхности для контактирования с захватываемой деталью.Схват работает следующим образом При ходе штока 3 привода 2 рука промышленного робота; или манипулято" ра перемещается рамка 4 с рейками 5 относительно корпуса 1. Рейки 5 свои" ми зубцами сцеплены с зубчатыми секторами (или шестернями) 6 и поворачивают их вокруг осей 7. Вместе с сектором 6 поворачивается и скрепленное с ним посредством штифта 8 водило 9, которое при своем движении ведет стержни 10, описывая вместе с ними дуго" вую траекторию относительно оси 7.Вместе со стержнями 10 перемещаются установленные на...
Схват промышленного робота

Номер патента: 1579775
Опубликовано: 23.07.1990
Автор: Гильденфун
МПК: B25J 15/00
Метки: промышленного, робота, схват
...плоских пружин 3 15 акреплейы захватные губки 4, Источк 5 4 бстоянного тока образует с аждой из.плоских пружин 3 замкнутую лектрическую цепь, Схват работает следующим образом. 2 О На плоские. пружины 3 подается пооянный ток одного направления, При ом плоские пружины 3 притягиваются иа к другой как это показано пункром и захватные губки 4 .раздвига ся, Схват позиционируется над деалью, после чего на плоские пружиныподается постоянный ток различных направлений, Плоские пружины 3 оттал"киваются одна.от другой, что приводит к сжатию захватных губок 4 и захвату детали,Для открепления детали на, плоские .пружины 3 подаетея постоянный ток од,ного направления. Изменяя силу тока,можно регулировать усилие зажимадетали,Формула и э о б р е т е н и...
Магнитный захват “новокор-б

Номер патента: 1579776
Опубликовано: 23.07.1990
Авторы: Бабий, Коренев, Новоселов
МПК: B25J 15/06
Метки: захват, магнитный, новокор-б
...своих магнитных свойств. Формула изобретения Составитель Х. ИлюковичРедактор А. Шандор Техред Л,Сердюкова Корректор С,Шевкун Заказ 1984 Тираж 684 . ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д, 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ул, Гагарина,101 3Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота- манипулятора.Целью изобретения является упрощение конструкции магнитного захвата.На, чертеже показан захват, общий видеЗахват руу 1 а 4 жит корпус 1 с разме О ,щенными в ем,постоянными магнитами 2 и магнитопроводом 3, на котором устаиовлемфнагревательный элемент 4, отделенный от магнитов. 2...
Устройство для управления приводом робота

Номер патента: 1580317
Опубликовано: 23.07.1990
Авторы: Беляков, Емельянов, Исаков, Коровин, Кузнецова, Сизиков
МПК: B25J 13/00, G05B 11/00
...сигнала, задаваемого задатчиком 21, ключ 15 разомкнут и на сумматор 17 поступает только сигнал с выхода блока 19 умножения с весовым коэффициентом К 8, Если 09 021, ключ 15 замкнут и на входы сумматора 17 поступают сигналы с выхода ключа 15 с весовым коэффициентом К 4 и с выхода корректирующего блока 16 с весовым коэффициентом, равным 1.,Следовательно, сигнал ОКОС определяется как К 809 3 дп 01, 09021;(К 8+К 4+В 16(р).093 дп 0109021 р гДЕ %18(р) -1передаточная функТ 2 р +1ция корректирующего блока 16;Т 2=Т м,Тм - механическая постоянная времени электродвигателя,К 4 и К 8 - коэффициенты усиления сумматора 17 по соответствующему входу, выбираемые в зависимости от параметров электродвигателя 7 и диапазона действующих моментных возмущающих...
Захватный комплекс

Номер патента: 1581576
Опубликовано: 30.07.1990
Автор: Руднев
МПК: B25J 15/00
...Гагарина,101 с Изобретение относится к области машиностроения, в частности, к захватным устройствам транспортных манипуляторов, работающих в вакууме или иной технологической среде, и может быть использовано, например, в гибких автоматизированных производствах больших и сверхбольших интегральных схем, 1 ОЦелью изобретения является упрощение конструкции и повышение надежности,На чертеже изображена схема комплекса. 15Захватный комплекс содержит захват, на корпусе 1 которого установлены упругодеформирувмые зажимные губки 2. На концах губок 2 закреплены ферромагнитные элементы 3 и упоры 4, 2 О Упоры 4 взаимодействуют с ограничителями 5 хода губок.На рабочей позиции за газонепроницаемой стенкой б расположены электромагниты 7 (или постоянные...
Манипулятор

Номер патента: 1583282
Опубликовано: 07.08.1990
Автор: Шоланов
МПК: B25J 11/00
Метки: манипулятор
...в виде30внешнего 10 и внутреннего 11 телескопических элементов. В этом случае одиниз телескопических звеньев 10 образует сферическую пару или заменяющее еекинематическое соединение со звеном 7а другой элемент 11 - со звеном 3. Из 35менение размеров телескопического звена Фиксируется автоматически Фиксатором, который имеет подвижную втулку12, имеюцую Фланцы и образующие винтовую пару с внутренним телескопи 40чееким элементом 11, Рля исключениядвижения ротации телескопический элемент 11 имеет шлицевой наконечник 13,который перемещается по внутреннимшляцам элемента 10. Кроме того, Фик 45сатор включает в себя электромагнит 14 и рычаг 15, связанный одним плечом с сердечником этого электромагнита. Втулка 12 фиксатора имеет фланцы 16 и...
Модуль резонансного манипулятора

Номер патента: 1583283
Опубликовано: 07.08.1990
Авторы: Духанин, Семеноженков
МПК: B25J 11/00
Метки: манипулятора, модуль, резонансного
...также предусмотреныдля регулировки усилия предваритель 50ного поджатия упругих элементов, выполненных в виде пружин 11 и 17.Устройство работает следующим образом.В исходном положении, например,дпя медленного перемещения выходногозвена 1 пружины 11 и 17 сжаты, упор23 пневмоцилиндром 24 введен в отверстие 25 опорной шайбы 18, упоры 8 и 10 взаимодействуют с опорными шайбами 13 и 19, оси рычагов 3 и 4 примерно совпадают, т,е. система занимает положение неустойчивого равновесия. Для начала движения включают двигатель 6, который поворачивает вал 5, а вместе с ним и рычаг 4. Система рычагов 3 и 4 выходит из положения неустойчивого равновесия, а пружина 11, давя на опорную шайбу 13 и на упор 8, разгоняет звено 1 и инерционные массы,...
Схват манипулятора

Номер патента: 1583284
Опубликовано: 07.08.1990
Авторы: Бурдин, Мороз, Резаев, Черевацкий
МПК: B25J 15/00
Метки: манипулятора, схват
...оболочек 5 ссштуцерами 3 должны быть герметичными.Схват манипулятора работает следующим образом.Манипулятор 2 подводит пальцысхвата к рабочему предмету 9. От привода через магистраль 4 давления вовнутренние полости основания 1 и пальцев 5 подается рабочее давление и,достаточное для изгиба пальцев. Под действием давления о угол укладки +(яр" ,мирования) спиралей высохопрочных воло кон 6 изменяется вменьшую сторону (например, если угол й до нагружения равен 70, то под действием давления оностановится меньшим этой величины, т.е. он стремится к углу 55 ч 4 , при ко" тором конструкция имеет равновесную систему). Чем больше значение о,тем на большую величину уменьшается угол + Ц. Физически это изменение угла происходит за счет разворота...
Захват промышленного робота

Номер патента: 1583285
Опубликовано: 07.08.1990
МПК: B25J 15/00
Метки: захват, промышленного, робота
...движение вала электродвигателя 2 посредством кривошипа 10 преобразуется в прецессионное движение сателлитного блока колес 4.В результате зацепления венцов 5 и 6 сателлитного блока колес 4 с зубьями колес 7 и 8 последнее вращается с редукциейВ 2 Вгде Е-, 2, - соответственно числазубьев венцов сателлитного блока колес;Е , Е - числа зубьев колес 7 и 8.При включенном датчике 19 ползун 18 жестко связан с ведомым колесом 8, его редуцированное вращательное движение посредством винтовой канавки 17 превращается в поступательное движение промежуточной втулки 15, которое приводит к осуществлению схвата (втулка 15 днищем канавок воздействует на схват 14).Для осуществления поиска искомого объекта в зоне с некоторым радиусом втулка 21, находясь...
Устройство автоматической смены инструмента манипулятора

Номер патента: 1583286
Опубликовано: 07.08.1990
МПК: B25J 15/00
Метки: автоматической, инструмента, манипулятора, смены
...4), который воздействует на выключатель 17 в моментзакрытия защелок,Устройство работает следующим образом.Рабочий инструмент (захватные устройства и др.), предназначенный дляавтоматической смены, помещается вспециальное магазинное устройство,имеющее соответствующие гнезда дляего размещения. На каждом рабочеминструменте закреплен стакан 2 описываемого устройства. Хвостовик 1 устройства закрепляется на конечномзвене манипулятора. На фиг. 1-4 показано устройство в состыкованном положении. Для замены инструмента рабочийорган манипулятора подводится к магазинному устройству и опускается в соответствующее гнездо. При этом нарукоятку защелки 6 воздействует упор,жестко закрепленный в магазинномустройстве. Защелки 5 и 6 раскрываются, толкатель...
Схват промышленного робота

Номер патента: 1583287
Опубликовано: 07.08.1990
МПК: B25J 15/02
Метки: промышленного, робота, схват
...по авт.св, Р 831614.Пелью изобретения является повышение надежности путем обеспечения сМаэки зубчато-реечной передачи рабочей средой силового цилиндра.На фиг. 1 изображено устройство, продольный раэр.з; на фиг. 2 - сечение А-А на Фиг. 1.Схват имеет корпус 1 с торцовыми крышками 2 и 3, боковыми сменными 25 Фланцами 4 и 5, в которых со стороны поршневой полости 1 с помощью подшипников 6 параллельно с воэможностью зацепления между собой и соответствующими шток-рейками установлены эуб- ЗО чатые колеса 7 и 8. Поршень 9 устройства с помощью гайки 10 закреплен н 4 втулке 11, один конец которой п 1 оходит через крышку 2 и имеет посадочное место 12 стыковки со станочным приспособлением или для эакрепления губки 13, а другой с...
Электромагнитный захват

Номер патента: 1583288
Опубликовано: 07.08.1990
Авторы: Серебряков, Федоров
МПК: B25J 15/06
Метки: захват, электромагнитный
...- сечение Б-Б на фиг. 1; на фиг. 4-6 - вид В на фиг. 1, ответные .отверстия, варианты выполнения.Захват содержит цилиндрический полый корпус 1, установленный на руке 2 промышленного робота. Б корпусеустановлена электромагнитная систе О ма, содержащая магнитопроводы 3 и 4, имеющие сферическую поверхность и подпружиненные друг относительно друга пружинами 5. На поверхности магии" топроводов 3 и 4 закреплены упоры 6.На магнитопроводах 3 и 4 соответственно установлены катушки 7 и 8 возбуждения, соединенные с источником 9 питания. Рука 2 имеет приводы вращения 1 О и линейного перемещения 11.Упоры 6 расположены в ответных от 30 верстиях 12, выполненных в корпусеЗахват работает следующим образом. Электромагнитный захват поочередно с помощью...
Магнитный захват для хрупких изделий

Номер патента: 1583289
Опубликовано: 07.08.1990
Автор: Куренков
МПК: B25J 15/00, B25J 15/06
Метки: захват, магнитный, хрупких
...корпус 3. Плоские пружины 2 одним концом закреплены на основании 1, а другим концом закреп" лены на опорах 4, имеющих возможность регулировочного перемещения по направляющим 5, установленным на корпусе 3. Регулировка обеспечивает 20 ся с помощью гайки 6 и винта 7, установленного посредством опор 8 на корпусе 3, Б корпусе 3 установлен постоянный магнит 9. На корпусе 3 установлен привод линейного перемещения магнита 9, выполненный в виде пневмоцилиндров 10. На основании закреплен центрирующий штырь 11, свободный конец которого размещен в ответном отверстии, выполненном в корпусе 3. Рабочая поверхность корпуса выполнена в виде немагнитной мембраны 13.Устройство работает следующим образом. 35 Основание 1 вместе с корпусам 3 опускается на...
Звено механической руки манипулятора

Номер патента: 1583290
Опубликовано: 07.08.1990
МПК: B25J 18/00
Метки: звено, манипулятора, механической, руки
...механической руки манипулято 45ра работает следующим образом,Привод создает крутящий момент Ри короткий основной рычаг 3 (б) поворачивается и перемещает дополнительный шарнир 9, соединяющий" два дополнительных рычага 7 и 8. Движение зве- эц на механической руки манипулятора осуществляется по линии, определяемой прорезью 2 копира 1.В данном варианте копира 1 основное рабочее время дополнительного шарнира 9 движется по прямолинейной части копира, что при условии симметричного расположения основных рычагов обеспечивает прямолинейное движение основного шарнира, соединяющего длинные основные рычаги 4 и 5. При необхо" димости переориентации, например для смены захвата, движение дополнительного шарнира 9 происходит по криволинейной части...
Рука манипулятора

Номер патента: 1585142
Опубликовано: 15.08.1990
Автор: Чебоксаров
МПК: B25J 9/06
Метки: манипулятора, рука
...углов поворота и снижения массы и упругих характеристик звеньевуки манипулятора.,На чертеже показана принципиаль.ная кинематическая схема руки манипутятора.Рука манипулятора содержит шарнирно соединенные звенья 1-3, захватноеустройство 4 и приводы поворота звеНьев, выполненные в виде стационарйой части (не показано), установленной на стойке манипулятора, тяговыхэлементов 5-7, концы которых соединены с осями шарниров соответственнозвеньев 2-4, тяговых элементов 8 и 9,Охватывающих барабан поворота зах, ватного:,устройства 4 вокруг.продоль-.ной оси, и блоков-12 свободно враЩающихся роликов, расположенных наОсях шарниров соответственно звеньев1-3 и сгибаемых тяговыми элементами" 5-8. Рука также содержит датчики 13,15 углов поворота звеньев,...
Модуль резонансного манипулятора

Номер патента: 1585143
Опубликовано: 15.08.1990
Авторы: Духанин, Семеноженков
МПК: B25J 9/08
Метки: манипулятора, модуль, резонансного
...Фиксаторы 12 и 13 могут приводиться в движениеэлектромагнитами, линейными электродвИгателями и т.п. (не показаны).На валу 9 кривошипа 8 закреплен оди конец спиральной пружины 14, дрязгой конец которой через червячное колесо 15 и червяк 16 связан с двигателем 17.Звено 3 может быть связано с исполнительным механизмом робота или имФть схват.Устройство работает следующим образом.45Исходным положением устройства являтся положение выстоя, когда звено 3:1 анимает, например, крайнее левое положение и своим упором 4 максимально сжимает пружину 6. Оси шатуна 7 и крйвошипа 8 примерно совпадают, при этом система зафиксирована в положении неустойчивого равновесия Фиксатором 12. Двигатель 17 включен и заводт спиральную пружину 14, Во избежуание...
Манипулятор

Номер патента: 1585144
Опубликовано: 15.08.1990
Авторы: Айрапетян, Арзуманян, Егишян, Парикян, Саркисян, Степанян
МПК: B25J 11/00, B25J 17/00
Метки: манипулятор
...звено 5 с основанием 2. При этом оси шарниров 7 и 6 каждого передаточного механизма параллельны между со" бой. 45Манипулятор работает следующим образом.При включении приводов (на фиг.1 не показаны) происходит поворот по заданной программе входных звеньев 5 передаточных маханизмов. Вследствие кинематической связи платформы 1 с каждым из приводов посредством соответствующего передаточного механизма совоупось движений дных звеньев всех передаточных механизмов приводит к смещению в пространстве выходного звена манипулятора (платформы). В результате этого платфорПри этом сообщается перемещение тягам 3, которые связаны со звеньями4 вращательными парами 6, оси которых параллельны осям пар 7. Такимобразом, осуществляется перемещениеи ориентация...