Способ управления роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
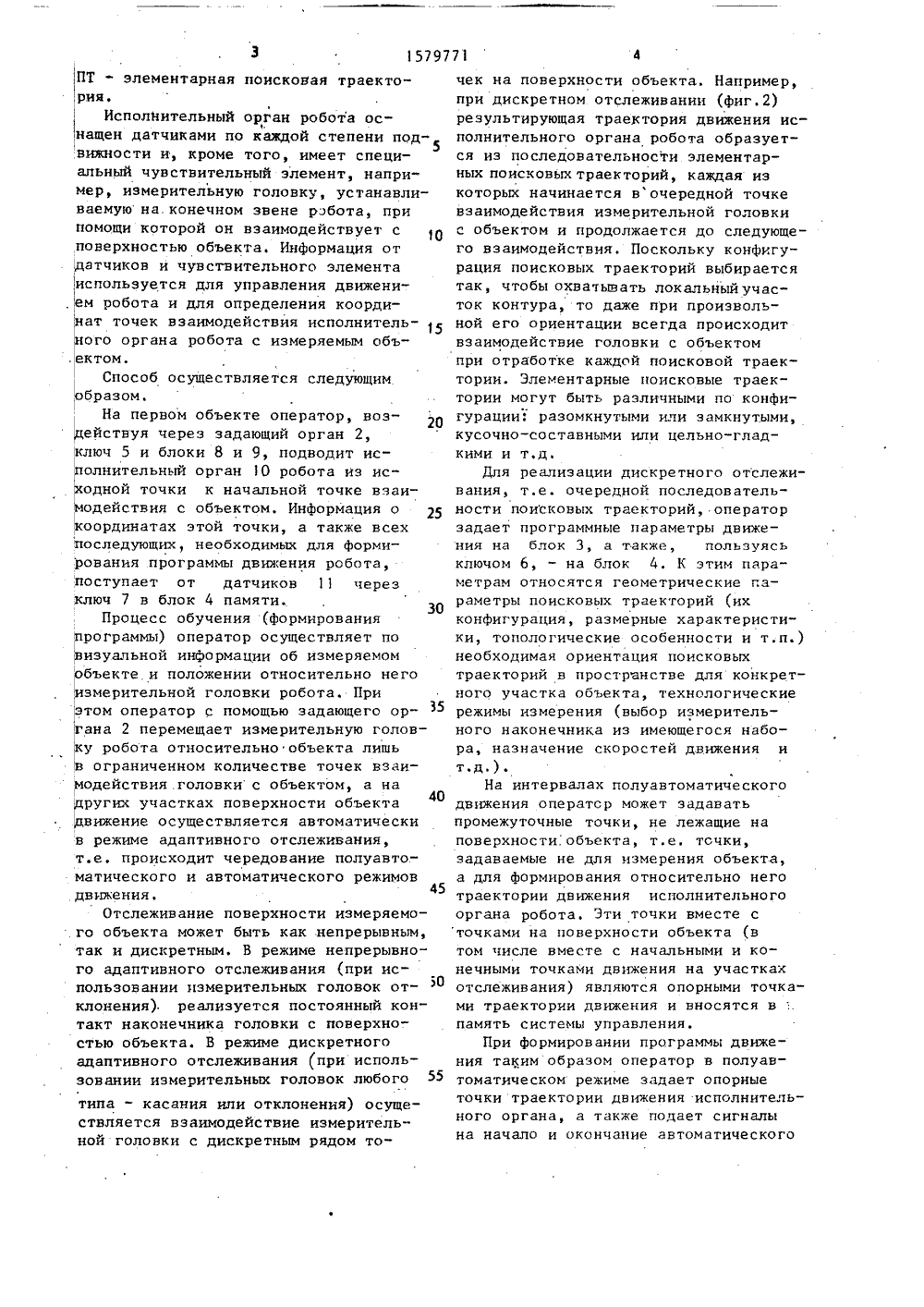
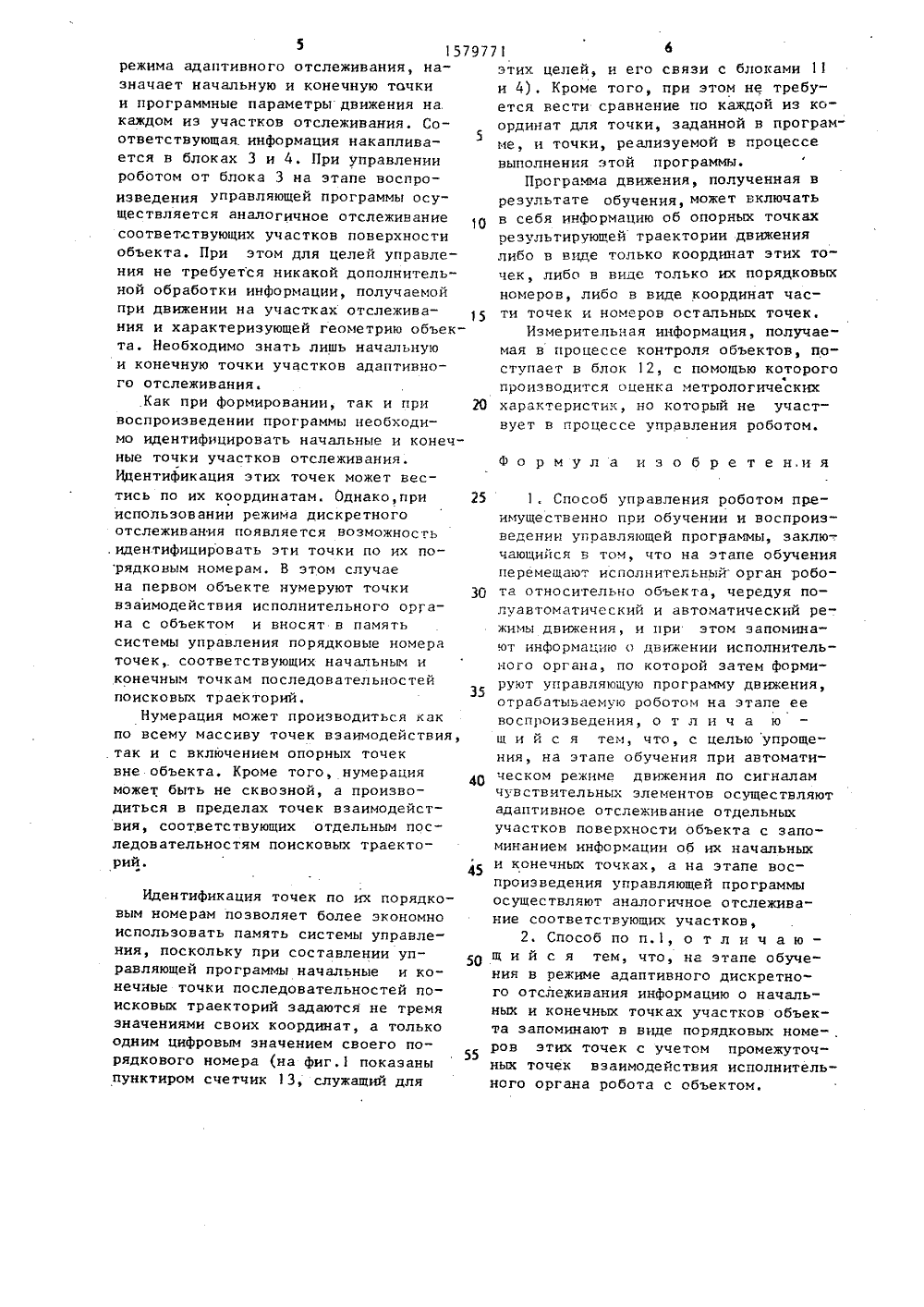
ПТ - элементарная поисковая траектория.Исполиительный орган робота оснащен датчиками по каждой степени под5 вижности и, кроме того, имеет специальный чувствительный элемент, напри" мер, измерительную головку, устанавливаемую на.конечном звене робота, при помощи которой он взаимодействует с поверхностью объекта. Информация от ,датчиков и чувсгвительного элемента используется для управления движени,ем робота и для определения координат точек взаимодействия исполнитель-;5 ного органа робота с измеряемым объ.ектом.Способ осуществляется следующим образом.На первом объекте оператор, воздействуя через задающий орган 2, ключ 5 и блоки 8 и 9, подводит исполнительный орган 10 робота из исодной точки к начальной точке взаимодействия с объектом. Информация о 25 координатах этой точки, а также всех последующих, необходимых для формирования программы движения робота, поступает от датчиков 11 через ключ 7 в блок 4 памяти.Процесс обучения (формирования программы) оператор осуществляет по визуальной инФормации об измеряемом объекте и положении относительно него измерительной головки робота. При этом оператор с помощью задающего органа 2 перемещает измерительную головку робота относительно объекта лишь в ограниченном количестве точек взаимодействия головки с объектом, а на других участках поверхности объекта движение осуществляется автоматически в режиме адаптивного отслеживания, т.е. происходит чередование полуавтоматического и автоматического режимов движенияОтслеживание поверхности измеряемого объекта может быть как непрерывным, так и дискретным, В режиме непрерывного адаптивного отслеживания (при использовании измерительных головок от- ф клонения) реализуется постоянный контакт наконечника головки с поверхно-. стью объекта. В режиме дискретного адаптивного отслеживания (при использовании измерительных головок любого 55типа - касания или отклонения) осуществляется взаимодействие измерительной головки с дискретным рядом точек на поверхности объекта, Например, при дискретном отслеживании (фиг.2) результирующая траектория движения исполнительного органа робота образуется из последовательности элементарных поисковых траекторий, каждая из которых начинается вочередной точке взаимодействия измерительной головки с объектом и продолжается до следующего взаимодействия. Поскольку конфигурация поисковых траекторий выбирается так, чтобы охватывать локальныйучасток контура, то даже при произвольной его ориентации всегда происходит взаимодействие головки с объектом при отработке каждой поисковой траектории, Элементарные поисковые траектории могут быть различными по конфигурации: разомкнутыми или замкнутыми, кусочно-составными или цельно-гладкими и т,д.Для реализации дискретного отслеживания, т.е. очередной последовательности поисковых траекторий, оператор задает программные параметры движения на блок 3, а также, пользуясь ключом 6, - на блок 4. К этим параметрам относятся геометрические параметры поисковых траекторий (их конфигурация, размерные характеристики, топологические особенности и т.п.) необходимая ориентация поисковых траекторий в пространстве для конкретного участка объекта, технологические режимы измерения (выбор измерительного наконечника из имеющегося набора, назначение скоростей движения и тед ) еНа интервалах полуавтоматического движения оператср может задавать промежуточные точки, не лежащие на поверхности.объекта, т.е. точки, задаваемые не для измерения объекта, а для формирования относительно него траектории движения исполнительного органа робота, Эти точки вместе с точками на поверхности объекта (в том числе вместе с начальными и конечными точками движения на участках отслеживания) являются опорными точками траектории движения и вносятся в память системы управления.При формировании программы движения таким образом оператор в полуавтоматическом режиме задает опорные точки траектории движения исполнительного органа, а также подает сигналы на начало и окончание автоматического5 157 режима адаптивного отслеживания, назначает начальную и конечную точки и программные параметры движения на каждом иэ участков отслеживания. Соответствующая. информация накапливается в блоках 3 и 4. При управлении роботом от блока 3 на этапе воспроизведения управляющей программы осуществляется аналогичное отслеживаниесоответствующих участков поверхности объекта. При этом для целей управления не требуется никакой дополнительной обработки информации, получаемой при движении на участках отслеживания и характеризующей геометрию объекта. Необходимо знать лишь начальную и конечную точки участков адаптивного отслеживания.,Как при формировании, так и при воспроизведении программы необходимо идентифицировать начальные и конечные точки участков отслеживания. Идентификация этих точек может вестись по их координатам. Однако,при использовании режима дискретного отслеживания появляется возможность .идентифицировать эти точки по их порядковым номерам. В этом случае на первом объекте нумеруют точки взаимодействия исполнительного органа с объектом и вносят в памятьсистемы управления порядковые номера точек,. соответствующих начальным и конечным точкам последовательностей поисковых траекторий.Нумерация может производиться как по всему массиву точек взаимодействия, .так и с включением опорных точек вне объекта. Кроме того, нумерация может быть не сквозной, а производиться в пределах точек взаимодействия, соответствующих отдельным последовательностям поисковых траекторий. Идентификация точек по их порядковым номерам позволяет более экономно использовать память системы управления, поскольку при составлении управляющей программы начальные и конечные точки последовательностей поисковых траекторий задаются не тремя значениями своих координат, а только одним цифровым значением своего порядкового номера (на фиг. показаны пунктиром счетчик 13, служащий для977 этих целей, и его связи с блоками 11 и 4). Кроме того, при этом не требуется вести сравнение по каждой из координат для точки, заданной в программе, и точки, реализуемой в процессе выполнения этой программы.Программа движения, полученная в результате обучения, может включать в себя информацию об опорных точках результирующей траектории движения либо в виде только координат этих точек, либо в виде только их порядковых номеров, либо в виде координат части точек и номеров остальных точек.Измеритепьная информация, получаемая в процессе контроля объектов, поступает в блок 12, с помощью которого производится оценка метрологических характеристик, но который не участвует в процессе управления роботом. 1 О 15 20 Ф о р м у л а и з о б р е т е н,и я ного органа робота с объектом. 25 1. Способ управления роботом преимущественно пои обучении и воспроизведении управляющей программы, заклю-:чающийся в том, что на этапе обученияперемещают исполнительный орган робо 30 та относительно объекта, чередуя полуавтоматический и автоматический режимы движения, и при этом запоминают информацию о движении исполнительного органа, по которой затем форми 35руют управляющую программу движения,отрабатываемую роботом на этапе еевоспроизведения, о т л и ч а ющ и й с я тем, что, с целью упрощения, на этапе обучения при автоматическом режиме движения по сигналамчувствительных элементов осуществляютадаптивное отслеживание отдельныхучастков поверхности объекта с запоминанием информации об их начальныхи конечных точках, а на этапе воспроизведеция управляющей программыосуществляют аналогичное отслеживание соответствующих участков,2. Способ по п.1, о т л и ч а ю -50 щ и й с я тем, что, на этапе обучения в режиме адаптивного дискретного отслеживания информацию о начальных и конечных точках участков объекта запоминают в виде порядковых номе-,ров этих точек с учетом промежуточных точек взаимодействия исполнитель57977 цг.7 Составитель И.Афо Техред М,Ходанич Редактор А.Шандор Корректор М.Пож Тираж 699 Заказ 1 одписное ГКНТ СС открытиям осударственного комитета по изобретениям и 113035, Москва, Ж-Э 5, Раушская наб Производственноельский. комбинат "Патент", г, Ужгород, ул, Гагарина, 1
СмотретьЗаявка
4493686, 11.10.1988
ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. А. А. БЛАГОНРАВОВА
АЙЗЕНБЕРГ ЕВГЕНИЙ ВУЛЬФОВИЧ, ГЕЙШЕРИК ВАЛЕРИЙ СЕМЕНОВИЧ, ЛЬВОВ АЛЕКСАНДР ЛЕОНИДОВИЧ
МПК / Метки
МПК: B25J 13/00, B25J 9/16
Метки: роботом
Опубликовано: 23.07.1990
Код ссылки
<a href="https://patents.su/4-1579771-sposob-upravleniya-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления роботом</a>
Устройство для автоматического выбора направления движения объекта

Номер патента: 1270089
Опубликовано: 15.11.1986
МПК: B65G 47/46
Метки: выбора, движения, направления, объекта
...нулевой сигнал с прямого входа элемента 5 ЗАПРЕТ снят разомкнутым контактом переключателя 3 задатчика 4 адреса,а так как на его инверсном входеприсутствует разрешающий нулевой сигнал с выхода элемента 6 ЗАПРЕТ, тона выходе элемента 5 ЗАПРЕТ формируется команда на движение "Влево(свободный вход элемента ЗАПРЕТ эквивалентен единичному сигналу).При передвижении объекта в сторону выбранного адреса единичным сигналом с выхода каждого следующего походу движения датчика 7.17.п поло.жения соответствующий ему триггерустанавливается в , и одновременно этим же сигналом через соответствующий многовходовой элемент 8 или9 ИЛИ каждый предыдущий триггер 1,11. и возвращается в исходное состояние,При достижении объектом заданного-го пункта о чем...
Устройство для формирования координат траекторий движения объектов

Номер патента: 1721625
Опубликовано: 23.03.1992
Авторы: Ветерис, Ветярис, Воронов, Кучинскас
МПК: G09G 1/00
Метки: движения, координат, объектов, траекторий, формирования
...адреса с выхода блока 5 памяти поступает на информационные входы регистра 6, куда заносится синхронизирующим импульсом с выхода элемента 10 задержки. С информационных выходов регистра 6 базовый адрес подается на одни информационные входы сумматора 7, к другим информационным входам которого подключены выходы счетчиков текущего адреса через блоки 18 - 20 элементов И и блок 21 элементов ИЛИ,С выхода элемента И 4-1 импульс поступает не только на вход считывания фиксированной ячейки памяти блока 5, но и на вход счетчика 17-1, фиксирующего факт поступления координат объекта с данным номером. Учитывая, что в данный момент высоким потенциалом дешифратора 3 открыты элементы блока 18 элементов И, товыходы счетчика 17-1 через блок 18 элементов И и...
Способ определения скорости движения объекта

Номер патента: 714284
Опубликовано: 05.02.1980
Авторы: Бингелене, Домаркас, Трюкас
МПК: G01P 5/08
Метки: движения, объекта, скорости
...движущегося объекта,Для этого при измерении скорости движенияобъекта относительно окружающей среды определением автокорреляционной функции сигналов,возникающих из-за неоднородности поверхности движущегося объекта,электроакустическим преобразователем принимают акустические шумы, возникающие в оболочке объекта при воздействии на него наступающего потбка окружающей среды и определяют скорость движения объекта по ширине основного лепестка авто- корреляционной функции этих шумовСоставитель М.ХаустовРедактор В.Сапирштейн Техред Л.Алферова КорректорЯ,Веселов Заказ 76/40 Тираж 1019 ЦНИИПИ Государственного к по делам изобретений и 5, Москва, Ж, РаушскаПодписномитета СССРоткрытийнаб., д. 4/5 11303 Пате г.у ал ПП од, ул.Проектная,4 Способ...
Устройство для определения скорости движения объектов и их типов

Номер патента: 1193716
Опубликовано: 23.11.1985
Авторы: Духанин, Новицкий, Полищук
МПК: G08G 1/01
Метки: движения, объектов, скорости, типов
...соединен с ним непосредственно.Синхронизатор 20 представляет собой генератор тактовой частоты, которая определяется из выражения.Ь=- М,где- частота следования строк развертки;М - число отсчетов координаты Х по одной строке.При этом М = -- ,еЯгде 1 - длина зоны, охватываемой приемником 1 изображения;ЬХ - дискрет определения координаты Х,Устройство работает следующим образом.Приемник 1 изображения производит преобразование визуальной информации о состоянии зоны контроля в электрический сигнал, который поступает на вход аналогоцифрового преобразователя 2, где производится преобразование видеосигнала в двоич- ный код. Разрядность кода определяется из условия устойчивого разделения объекта и фона. Код с выхода аналого-цифрового...
Устройство для определения скорости движения объекта

Номер патента: 1242829
Опубликовано: 07.07.1986
МПК: G01P 3/36
Метки: движения, объекта, скорости
...тока и открываются ключи 12 и 14, через которые импульсы от генераторов 16 и 17 импульсов проходят в счетчики 18 и 19 импульсов, а также на .первые входы реверсивных счетчиков 20 и 21, одновременно от 829 4крываются также ключи 13 и 15, черокоторые импульсы от. генераторов 16и 17 импульсов проходят на вторыевходы реверсивных счетчиков 20 и 21.,Под действием работы генераторов110 и 11 пилообразного тока начинается свечение столба газа в ЛГИ 1 и 2,Длина свечения изменяется по линейному закону. При этом фотоприемники4 и 6 могут двигаться как в направлении распространения свечения ЛГИ 1и 2, так и навстечу ему относительнонеподвижных фотоприемников 3 и 5. Будем считать составляющие Ч и Ч сознаком плюс, если движение фотоприемников...
Предыдущий патент: Устройство для управления приводом робота
Следующий патент: Задающее устройство для управления манипулятором
Случайный патент: Притир для обработки отверстий