Модуль манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
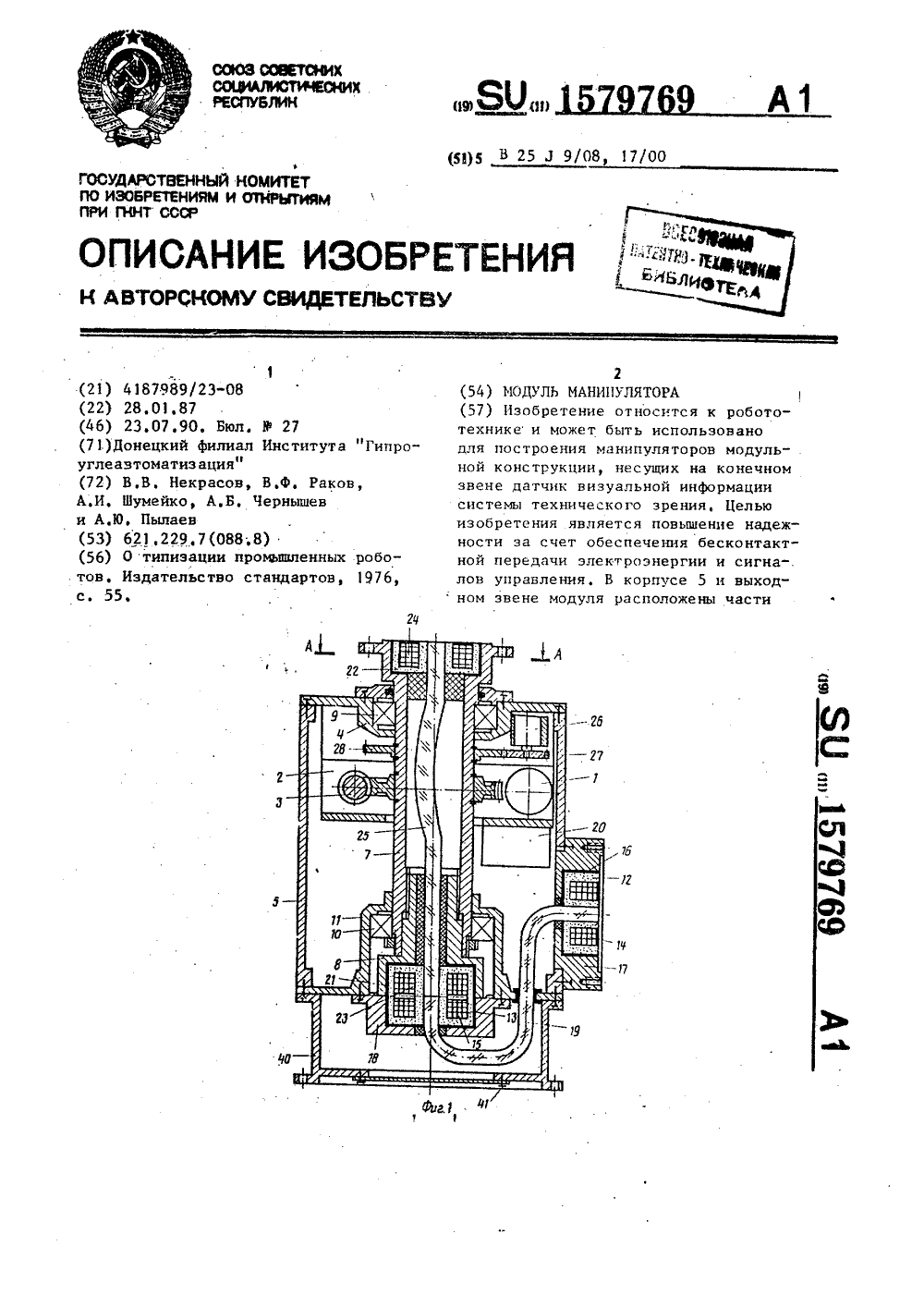
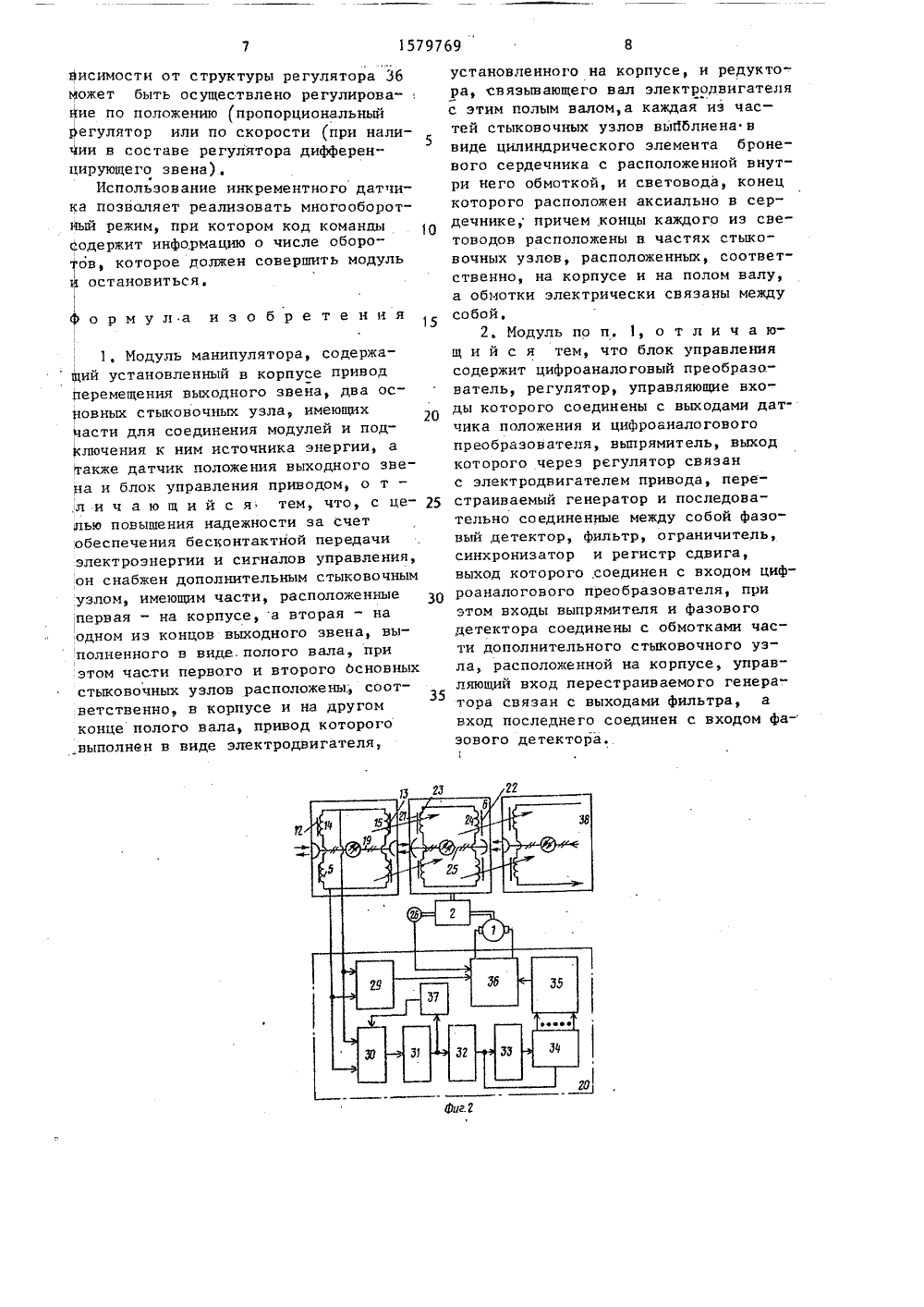
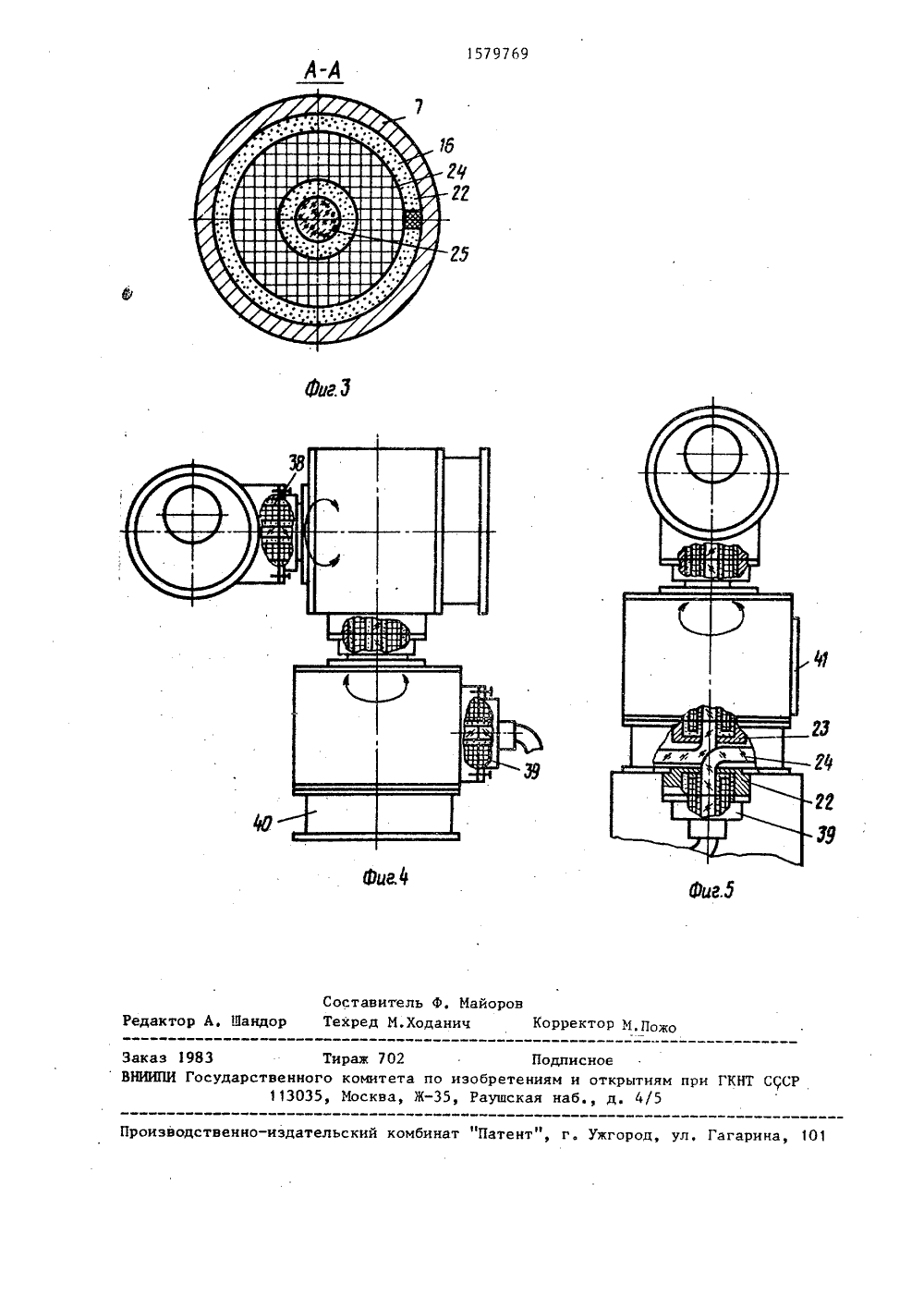
(51)5 В 25 ЭГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ПННТ СССР ИЗОБРЕТЕНИИДЕТЕЛЬСТВУ(56) 0 типизации проюпплтов. Издательство стандас. 55. РА к роботоьзовано сит 27 ст ов модул а конечн формации я, Целью лято а "ГипроРаков ои и ре ов в ение надеж бесконтакт ени нных робо тов, 1976 и сигна-, н выходнерг пусе олож ны част ОПИСАН К АВТОРСКОМ(57) Изобретение отнотехникеи может бытьдля построения манипуной конструкции, несущзвене датчик визуальнсистемы техническогоизобретения являетсяности за счет обеспечной передачи электроэлов управления, В корном звене модуля расп1579769 51015 стыковочных узлов, в которых черезгибкие световоды 19 и 25 передаютсяоптические сигналы, например, промодулированные видеосигналом от телекамеры, Напряжение переменного токаподводится к обмотке 14, размещеннойв цилиндрическом броневом сердечнике2, и одновременно к обмотке 15, параллельно соединенной с обмоткой 14,и на вход блока управления. Напряжение с обмотки 15 трансформируетсяна обмотку 23 и передается далее наобмотку 24, а затем - на последующие звенья манипулятора или на соединительный узел датчика визуальнойинформации, Цилиндрическая форма сердечников 13 и 21 обеспечивает непреИзобретение относится к робототехнике и может быть использовано дляпостроения манипуляторов модульнойконструкциинесущих на конечномзвене датчик визуальной информациисистемы технического зрения,Целью изобретения является повыше 30ние надежности за счет обеспечениябесконтактной передачи электроэнергиии сигналов управления,На фиг, 1 показан модуль манипулятора, общий вид; на фиг, 2 - функциональная схема модуля; на фиг. 3 - 35разрез А-А на Фиг,1; на фиг, 4 и 5варианты установки модулей,Модуль манипулятора содержит электродвигатель 1, редуктор 2 с червячной передачей Ц, закрепленные на40фланце 4 корпуса 5, Выходное звено 6выполнено в виде полого вала 7 ивтулки 8, опирающихся на подшипники9 и 10, установленные во Фланцах 4и 11 корпуса.45На корпусе 5 установлены цилиндрические броневые сердечники 12 и 13,образующие части соответственно первого и дополнительного стыковочныхузлов с обмотками 14 и 15, установленными в изолирующих втулках 16 иразмещенными в обоймах 17 и 18, Вцентральных отверстиях сердечников12 и 13 закреплены концы гибкого световода 19, Обмотки 14 и 15 соединены 55между собой параллельно.и одйовременяе подключены: к первому входу блока,20 управления. На выходном звене рывную передачу электроэнергии привзаимном вращении выходного звена относительно корпуса 5. Поворот выходного звена модуля, кинематическисвязанного зубчатыми колесами 27 и28 с датчиком положения 26, осуществляется электродвигателем 1 через червячную передачу ЦУправление поворотом обеспечивает блок управления, вкотором команды в виде частотно-модулированного напряжения питания от обмотки 14 через выпрямитель, фазовыйдетектор, фильтр, ограничитель, синхронизатор, регистр сдвига, цифроаналоговый преобразователь и регуляторпоступают к электродвигателю 1,1 з.п. Ф-лы, 5 ил,1 установлены цилиндрические броневые сердечники 21 и 22 соответственно дополнительного и второго стыковочных узлов с обмотками 23 и 24,а в центральных отверстиях сердечников 21 и 22 закреплены концы гибкого световода 25. К второму входу блока 20 управления подключен датчик 26положения, кинематически связанныйзубчатыми колесами 27 и 28 с валом 7,Выход блока 20 подключен к электродвигателю 1,Блок 20 управления (фиг.2 ) содержит выпрямитель 29 для питания электродвигателя 1 и остальных узлов блока. (линия питания на Фиг,2 не показана ), последовательно соединенныефазовый детектор 30, фильтр 31, ограничитель 32, синхронизатор ЦЦ, регистр 34 сдвига, цифроаналоговыйпреобразователь 35 и регулятор 36.Тактовый вход .регистра 34 подключенк выходу ограничителя 32, а второйи третий входы регулятора 36 - квыходам датчика 26 положения и выпрямителя 29. Управляющий вход генератора 37 подключен к выходу фильтра 31, а его выход - к третьему входу Фазового детектора 30, первый ивторой входы которого соединены ссоответствующими входами выпрямите"ля 29 и выходами обмоток 14 и 15. Выход ведомого звена (магнитопровод 22и выходной конец световода 25 ) стыкуются с аналогичным узлом последующего звена 38 (фиг. 4). Если модуль5 15797расположен в основании манипулятораили применяется самостоятельно, ккорпусу 5 подключается комбинированный кабель, содержащий токоведущиежилы и гибкий световод и оканчивающийся стыковочным узлом 39 (фиг,4и 5). Для крепления обоймы 17 предусмотрены посадочные поверхности вкорпусе 5 и опоре 40, закрепленнойна фланце 11. В зависимости от варианта установки модуля (фиг,4 и 5 )крьппка 41 закрывает одну из посадочных поверхностей,Иодуль работает следующим образом.Напряжение переменного тока, подводимое к обмотке стыковочного узла39, через магнитную связь индуктируетнапряжение на выводах обмотки 14, которое поступает на обмотку 15 и входблока 20 управления, Напряжение наобмотке 15 за счет трансформации передается на обмотку 23, далее на обмотку 24 и затем на последующие зве-, 25нья 38.При включении электродвигателя 1крутящий момент передается через червячную передачу 3 на полый вал 7,а через зубчатые колеса 27 и 28 движение передается на датчик 26 положения, Части стыковочных узлов соосно состыкованы торцами и вращаютсядруг относительно друга. При этомцилиндрическая форма магнитопроводов13 и 2 обеспечивает непрерывную передачу электроэнергии при взаимномвращении выходного звена 6 и корпу.са 5. Аналогично световой (оптический ) сигнал от узла 38 через совмещенные торцы световодов 25 и 19 по-.ступает на вход модуля и вводитсяв кабель связи через стыковочныйузел 39.Конструкция модуля обеспечивает 45возможность и обратной передачи какэлектрических, так и оптических сигналов,.поэтому каждый из внешних стыкованных узлов может быть как входом,так и выходом, в завимости от того,к какому из них подключен источникэлектроэнергии.Управление поворотом ведомогозвена модуля обеспечивает блок 20 управления. Напряжение питания на входе линии связи подвергается частотной модуляции, при которой частотайапряжения изменяется по закону передаваемой команды, кодированной бинар 69 6ной последовательностью, Состояниюлогического 0 соответствует частота Р, а состоянию логической 1частота Р, Пусть для определенностичастота РР , Напряжение питания свыхода обмотки 14 поступает одновременно на выходы выпрямителя 29 и фазового детектора 30. Выпрямитель 29преобразует входные напряжения переменного тока, которые поступаютна питание всех узлов блока 20 управления. Генератор 37 охвачен петлей фазовой автоподстрсйки частоты(ФЛПЧ) посредством фазового детектора 30, фильтра 31 и настроен на частоту Р , Когда в команде передаетсясостояние логического О, частотавходного сигнала, поступающего навход фазового детектора 30 с обмотки14, равна Р, и сигнал ошибки на выходе фильтра 31 близок к нулю, При передаче разряда команды, содержащегологическую 1, частота входного сигнала принимает значение Р, и напряжение на выходе фильтра 31 изменяется(увеличивается) до тех пор, пока частота генератора 37 не станет равнои ГТаким образом, выхоцнсе напряжение фильтра 31 повторяет значениебинарной кодовой последовательности,содержащей команду управления,Длительность переходного процесса в схеме с ФЛЛЧ обычно не менее десятков миллисекунд, поэтому фронтывькодных импульсов с фильтра оказываются пологими и непригодными для работы последуюцрх цифровых элементов,Формирование импульсов осуществляется ограничителем 32, например триггером ШмиттаСформированная кодоваяпоследовательность поступает одновременно на входы регистра 34 сдвига,преобразующего последовательный кодв параллельный, и синхронизатора 33,выделяющего из последовательной кодовой комбинации тактовый сигналдля управления регистром 34 сдвига,Параллельный код с выхода регистра34 сдвига преобразуется цифроаналоговым преобразователем 35 в напряжение уставки, которое сравнивае сяв регуляторе 36 с текущим значениемугла поворота выходного звена 6, снимаемым с датчика 26 угла поворота.Сигнал ошибки управляет двигателем 1,питание на который поступает с выпрямителя 29 через регулятор 36, В за 1579769висимости от структуры регулятора 36 может быть осуществлено регулирование по положению (пропорциональный регулятор или по скорости (при наличии в составе регулятора дифференцирующего звена).Использование инкрементного датчика позволяет реализовать многооборотйый режим, при котором код команды содержит информацию о числе оборо. ов, которое должен совершить модульостановиться,ормула изобретения1. Модуль манипулятора, содержа щий установленный в корпусе привод перемещения выходного звена, два осНовных стыковочных узла, имеющих 1 асти для соединения модулей и подключения к ним источника энергии, а также датчик положения выходного звена и блок управления приводом, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности за счет обеспечения бесконтактной передачи электроэнергии и сигналов управления, он снабжен дополнительным стыковочным узлом, имеющим части, расположенные первая - на корпусе, а вторая - на одном из концов выходного звена, выполненного в виде. полого вала, при этом части первого и второго дсновных стыковочных узлов расположены;, соответственно, в корпусе и на другом конце полого вала, привод которого выполнен в виде электродвигателя установленного на корпусе, и редуктора, связывающего вал электродвигателяс этим полым валом,а каждая из частей стыковочных узлов выбблнена ввиде цилиндрического элемента броневого сердечника с расположенной внутри него обмоткой, и световода, конецкоторого расположен аксиально в сердечнике, причем концы каждого иэ световодов расположены в частях стыковочных узлов, расположенных, соответственно, на корпусе и на полом валу,а обмотки электрически связаны междусобой.2. Модуль по п. 1, о т л и ч а ющ и й с я тем, что блок управлениясодержит цифроаналоговый преобразо. -ватель, регулятор, управляющие входы которого соединены с выходами датчика положения и цифроаналоговогопреобразователя, выпрямитель, выходкоторого через регулятор связанс электродвигателем привода, пере страиваемый генератор и последовательно соединенные между собой фазовый детектор, фильтр, ограничитель,синхронизатор и регистр сдвига,выход которого, соединен с входом цифроаналогового преобразователя, приэтом входы выпрямителя и фазовогодетектора соединены с обмотками части дополнительного стыковочного узла, расположенной на корпусе, управляющий вход перестраиваемого генера"тора связан с выходами фильтра, авход последнего соединен с входом фа-зового детектора.1579769 4-А Фиг ЛФигСоставитель ф. Майороведактор А, Шандор Техред М,Ходанич Корректор М,пожо Заказ 983 Тираж 702 ПОДПИСНОЕ ВНИИПИ Государственного комитета по изобретениям и открытиям при113035, Москва, Ж, Раушская наб., д. 4/5оизводственно-издательский комбинат "Патент", г, Ужгород, ул. Гагарина, 1
СмотретьЗаявка
4187989, 28.01.1987
ДОНЕЦКИЙ ФИЛИАЛ ИНСТИТУТА "ГИПРОУГЛЕАВТОМАТИЗАЦИЯ"
НЕКРАСОВ ВЛАДИМИР ВЛАДИМИРОВИЧ, РАКОВ ВАДИМ ФЕДОРОВИЧ, ШУМЕЙКО АЛЕКСАНДР ИВАНОВИЧ, ЧЕРНЫШЕВ АЛЕКСАНДР БОРИСОВИЧ, ПЫЛАЕВ АЛЕКСЕЙ ЮРЬЕВИЧ
МПК / Метки
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, модуль
Опубликовано: 23.07.1990
Код ссылки
<a href="https://patents.su/5-1579769-modul-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Модуль манипулятора</a>
Устройство для автоматического регулирования напряжения узла электрической сети

Номер патента: 736264
Опубликовано: 25.05.1980
Авторы: Литвак, Маркман, Прокопчик
МПК: H02J 3/12
Метки: сети, узла, электрической
...преобразователь 6 со входом процессора ПЦ7: имеющего блоки памяти БП 8, блок9 определения числовых характеристикО,Н. узлов распределительной сети по отноцению к ЦП, блок 10 оценки значимости взаимосвязи параметров режима узловсети. блок 11 определения средневзвеценных О. Н. узлов распределительной сети,выход которого соединен через цифроаналоговый преобразователь 12 с блоком сравнения 13, ко второму входу которого подключен также выход блока 4, блок задержки 14 своим входом соединен с блоком13, а выходом - с блоком 3.Устройство работает следующим образом.На шинах ЦП производят непрерывныйстатистический контроль О.Н. от номинального значения при помощи блока 4,на выходе которого формируются сигйалы,пропорциональные значениям...
Устройство для регулирования напряжения узла нагрузки

Номер патента: 991574
Опубликовано: 23.01.1983
Авторы: Иванков, Саляк, Селепина
МПК: H02P 9/14
...опорного напряжения положительной и огридательной полярностиблока связи, и через резисторы блока 1 рсвязи - с вхоаами апериоцических звеньев.Следовательно, при срабатывании 1 -релейного элемента на вход апериоцического звена подается сигнал, пропорциональный отклонению напряжения О с полярностью, соответствующей отклонениюнапряжения сети от номинального: +Ь 01соответствует повышению напряжения,- ЬЦ - снижению напряжения. Величинысопротивлений Р,й, выбираются изусловия получения вьмоцного напряженияапериоцических звеньев, пропорционального Д Ц. . Таким образом, на выходахобоих апериоцических звеньев 9 и 10образуются напряжения, пропорциональные Инеодинаковости напряжения К . Для вьаеления ее составляющих постоянная временизвена 9...
Способ регулирования напряжения узла электрической сети

Номер патента: 1469530
Опубликовано: 30.03.1989
Авторы: Гольдштейн, Рассказов, Шишков
МПК: H02J 3/12
Метки: сети, узла, электрической
...1необходимо, чтобы ЬР = К --- , иЫ фтогда уравнение движения роторовгенераторов системы будет иметь вида 1 а 8Т-- +К- -- +.СГ= Оа ЙСт.е. в уравнении появится демпфируюй 8щий член К --- и колебания углаЫактивной мощности системы будут затухающими и питающая система сохранит синхронную устойчивость относительно приемной.Активная мощность узлов нагрузки зависит от приложенного напряжения (11), причем эта мощность возрастает при повышении напряжения, т.е. каждый узел нагрузки характеризуется динамической характеристикой активной мощности по напряжению:ДРИ)а (+): иЬЩ 1)т.е. при повышении напряжения мощность нагрузки изменяется во времени в соответствии со своими динамическими характеристиками и возрастает при этом.1Введем передаточную...
Устройство для защиты электроаппарата с бестрансформаторным источником электропитания от попадания фазного напряжения на корпус

Номер патента: 862301
Опубликовано: 07.09.1981
Авторы: Ананский, Кишиневский, Коваль
МПК: H02H 3/14
Метки: бестрансформаторным, защиты, источником, корпус, попадания, фазного, электроаппарата, электропитания
...электрическая схема устройства длязащиты электроаппарата с бестрансформаторным источником электропитания от попадания фазного напряженияна корпус.устройство содержит коммутирующиеэлементы, выполненны . на четырех симисторах - основном 1, первом дополнительном 2, втором дополнительном 3и третьем дополнительном 4, элекгроаппарат 5 с бестрансформаторным источником электропитания 5, напримероднополупериодный выпрямитель, сос- И тоящий из выпрямительного диода б,нагрузки 7 и конденсатора 8, подключается к сети переменного токачерез двухполюсный неполяризованныйсетевой разъем, состоящий из розетки с гнездами 9 и 10 и вилки со штырями 11 и 12, причем гнездо 9 подключено к фазному проводу сети, а гнездо 10 - к эазеьщенному (нулевому)...
Система контроля напряженного состояния корпуса судна

Номер патента: 1180295
Опубликовано: 23.09.1985
Авторы: Григорьев, Давыденок, Иванов, Цырульников
МПК: B63B 9/00
Метки: корпуса, напряженного, состояния, судна
...а вход фильтра - с входами фильтра 17 низкочастотной составляющей и фильтра 18 динамической составляющей. Выходы сумматора и фильтров низкочастотной и динамической составляющих являются выходами блока фильтрации и подключены к вычислителю среднеквадратичного значения.Система работает следующим образом.На первичные преобразователи, установленные на корпусе судна, от блока 13 подают напряжение питания, Преобразователи вырабатывают электрические сигналы, параметры которых зависят от приложенной к корпусу нагрузки, состоящей из статической, волновой низкочастотной и динамической нагрузок. Электрические сигналы каждого преобразователя поступают на вход своего блока предварительной обработки, где они усиливаются и демодулируются. Кроме...
Предыдущий патент: Устройство шагового перемещения
Следующий патент: Устройство для управления приводом робота
Случайный патент: Расточная головка