Патенты с меткой «манипулятор»
Универсальный манипулятор для поворота тяжеловесных изделий в удобное для сварки положение

Номер патента: 1551506
Опубликовано: 23.03.1990
МПК: B23K 37/04
Метки: манипулятор, поворота, положение, сварки, тяжеловесных, удобное, универсальный
...манипулятор работает следующим образом.Изделие устанавливают на планшайбу. 5 и закрепляют, Производят запуск гидростанции, При наклоне изделия по 45 часовой стрелке давление подается в силовой цилиндр 9, который поворачивает кривошип 6 с осью З,и закрепленным на ней корпусом 4 с планшайбой 5 по часовой стрелке. При поворо 50 те кривошипа 6 одновременно поворачивается кривошип 7 и при определенном угле поворота своим захватом 8 захватывает шток силового цилиндра 10, который удерживается на траектории перемещения захвата 8 кривошипа 7 специ 55 альными приспособлениями, например пружиной (не показана) . Одновременно управляющей аппаратурой (не показана) действием массы понорачиается, а цилиндры 9,10 работают в режиме амортизаторов....
Манипулятор

Номер патента: 1553374
Опубликовано: 30.03.1990
Автор: Смычков
МПК: B25J 11/00
Метки: манипулятор
...гнездом первого ряда .кассеты 12, с включением манипуляторасхват 3 опустится, осуществит захватдетали, поднимется с ней, в этот момент сработает привод головки 2, которая переместится на позицию сборки,,прй этом один из пальцев 6 пройдетпо верхнему ручью паза э планкииГпод воздействием его повернет звездочку7, трубу 8 и упор 9 на штанге 11 наполовину шага между пальцами б. Напозиции сборки схват 3 установит деталь и освободится от нее, и головка2 под воздействием привода начнетперемещаться в исходное положение,при этом тот же пЛлец 6 переместится50по нижнему ручью паза 5, причем пере-мещение пальца б именно по нижнемуручью паза 5 произойдет из-за смеще-:ния вершин 13 выступа 14 на некотороерасстояние в сторону верхнего ручья55 паза...
Манипулятор

Номер патента: 1553375
Опубликовано: 30.03.1990
Автор: Гвоздев
МПК: B25J 11/00
Метки: манипулятор
...подъемно-транспортных операций.Целью изобретения является расши 5рение технологических возможностей засчет повышения грузоподъемности,На фиг. 1 представлен общий видманипулятора в плане; на фиг, 2 - разрез А-А на фиг. 1. 10Манипулятор содержит колонну 1,смонтированную на основании (не показано), механическую руку 2 в видестрелы раздвижного типа, установленную на колонне 1, и стойку 3, размещенную на основании. При этом на кон,це механической руки 2 расположенызахват 4 с приводом 5 его перемещенияи роликовая опора 6. Роликовая опора6 выполнена в виде. корпуса 7 с осью 208, подпружиненной посредством пружины 9, и роликов 1 О, размещенных наконцах оси 8. Стойка 3 включает раму11 с направляющими 12.Манипулятор работает следующим...
Манипулятор доильной установки

Номер патента: 1554841
Опубликовано: 07.04.1990
МПК: A01J 7/00
Метки: доильной, манипулятор, установки
...кран 44 и вакуум из вакуумпровода 25 поступает в пневмоцилиндр 5, его поршень 6 втягивается, сжимая пружину 11 и увлекая за собой шток 7 вместе с диском 10. Затем оператор перемещает тележку 1, установленную на полу доильного стакана на роликах 2, так, цтобы устройство 14 оказалось под выменем животного, а доильные стаканы 19 - сЬоку от него, При закрытии крана 44, пружина 11 выталкивает стакан 9 вместе с диском 10 вверх, и устройство 14 охватывает вымя животного. Санитарная обработка вымени (подмыв, массаж и сдаивание первых струек молока) осуществляется устройством 14 для подготовки вымени к доению.После подготовки вымени к доению, оператор открывает кран 44 и диск 10 опускается. Затем, повернув диск 10она 180 , оператор подводит под...
Манипулятор

Номер патента: 1555121
Опубликовано: 07.04.1990
Авторы: Коноплянко, Петренко, Ручка, Рябов, Смирнов
МПК: B25J 11/00
Метки: манипулятор
...13.Объем полостей 11 и 12 выполнен большим объема полостей 9 и 10.Гидроцилиндр 13 установлен с возможностью вращения на 90 относительно горизонтальной оси 15, перпендикулярной оси гидроцилиндра и проходящей посередине этого цилиндра, посредством редукторного электродвигателя 16. Электродвигатель 16 каждого сочленения подключен к общей системе 17 управления манипулятора, в которой сводятся данные о состоянии каждого гидро- двигателя 6.Манипулятор работает следующим образом.В положении звеньев манипулятора (фиг. 2) с горизонтальным расположением вала 7 продольная ось гидроцилиндра 13 расположена вертикально. Вес поршня 14 через нижнюю полость 12 создает перепад давления жидкости в нижней полости 10 моментного гидродвигателя 8, а из...
Манипулятор

Номер патента: 1555122
Опубликовано: 07.04.1990
Автор: Даровских
МПК: B25J 15/00
Метки: манипулятор
...расположение якоря25 относительно цанги 24, Между обмоткой 26 и якорем 25 установлена направляющая втулка 28.Манипулятор работает следующим образом.Схват выносит державку 15 в зону взаимоправляющие 4 и 9. Рабочая среда под давле,нием, образованным гидроаккумулятором 21, по энергомагистрали 20 подается в поршневые полости цилиндров 16 зажимных элементов 2. Шток-поршни 17 выдвинуты в радиальных направлениях до упора с втулками 18. При этом диаметр окружности, описывающей периферии роликов 19, превышает диаметр окружности поверхности захвата объекта 22. В процессе опускания зажимных элементов 2 внутрь поверхности объекта 22 ролики контактируют с последним и утапливают шток-поршни 17, Это обеспечивает требуемое усилие зажима объекта 22.В...
Манипулятор

Номер патента: 1555123
Опубликовано: 07.04.1990
Авторы: Кожевников, Косов, Кудрявцев, Уваров
МПК: B25J 18/00
Метки: манипулятор
...материала и имеет проводники 26 электроэнергии к приводу 11 схвата 10 и к сварочной головке.Манипулятор работает следующим образом.При подаче энергии к приводу 5 основного барабана 4 происходит вращение последнего и разматывание гибкой ленты 6, которая, проходя через направляющий механизм 7, приобретает трубчатую форму. При выходе из направляющего механизма замковый механизм 17 замыкает геометрическую форму механической руки 8. В зависимости от исполнения этого зг мкового механизма 17 замыкание осуществляется либо за счет схвата с натягом упругими частями 19 сопряженного цилиндрического элемента 18 наподобие застежки - молнии, либо за счет сил магнитного поля, создаваемого постоянными магнитами 20. Установка этих магнитов...
Манипулятор

Номер патента: 1556898
Опубликовано: 15.04.1990
Автор: Даровских
МПК: B25J 19/00
Метки: манипулятор
...для отмера отпиливаемых сортиментов,Машина работает следующим образом.Поворотом и наклоном стрелы 2 захватно-сучкорезная головка 3 наводится на выбранное для обработки дерево, захватывает и поднимает его. Протаскивающий механизм 4 подается к захватно-сучкорезной головке 3, захватывает дерево и протаскивает его на необходимую длину до упора 12. Гидроцилиндр 7 включается на выдвижение штока. Пружина 11 препятствует повороту пильного аппарата 5 в шарнире 09. Поэтому пильный аппарат 5 вместе с рычагом 8 поворачивается в шарнире 01 до касания рычагом 8 упора 9 и переходит из исходного положения (фиг. 2) в промежуточное (фиг. 3) . Далее гидро- цилиндр 7, растягивая пружину 11 и преодолевая сопротивление надвиганию пиль- ного аппарата 5,...
Манипулятор модульного типа

Номер патента: 1558663
Опубликовано: 23.04.1990
Автор: Крисятецкий
МПК: B25J 9/08
Метки: манипулятор, модульного, типа
...для стыковки с другиммодулем перемещения, например, установлены на подвижных штангах 4 последнего, т.е, первый модуль перемещениястановится исполнительным звеном второго модуля перемещения, По этойсхеме возможно создание целой гаммакомпоновок манипуляторов,На Фиг,1 и 2 модуль 1 перемещения установлен на неподвижных штангах 4, в его клемме зажата колонна16, на которой закреплен первый модуль 1 перемещения, Через горизонтальные втулки 15 второго модуля 1перемещения пропущены подвижные штанги 4, на которых закреплен третиймодуль перемещения с вертикальнымиподвижными штангами 4 и исполнительным органом 3 (схватом ),На фиг,З модуль 1 перемещения идополнительная опора 6 связаны междусобой штангами 4 и образуют основание.На штангах...
Манипулятор

Номер патента: 1558665
Опубликовано: 23.04.1990
Авторы: Сванадзе, Тамарашвили
МПК: B25J 11/00, B25J 9/04
Метки: манипулятор
...последнему возвратно-вращательное движение с некоторым углом поворота и с остановками в крайних положениях. Вместе с диском 8 поворачиваются ведомый вал 2 и механическая рука 3 манипулятора, Фиксация ведомого вала 2 в крайних положениях осуществляется при помощи устройства, содержащего подпружиненный толкатель 14 и ролик 13 3 1558665Изобретение относится к машиностроению, а именно к оборудованию длямеханизации и автоматизации технологических операций, может найти применение в цехах механической обработ 5ки, штамповки, ковки на операциях подачи заготовок в рабочую зону станков и является усовершенствованиемизобретения по авт.св, Р 831608.10Цель изобретения - расширение технологических воэможностей за .чет проведения дополнительных...
Буровой манипулятор

Номер патента: 1559136
Опубликовано: 23.04.1990
Авторы: Богубаев, Давыдов, Дворников
МПК: E21D 9/10
Метки: буровой, манипулятор
...Техред Л.Сердюкова Корректор Н,Ревская,Тираж 389 Подписное Заказ 828 ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,101 Изобретение относится к горнойпромышленности, в частности к буровым манипуляторам.Цель изобретения -,повышение про 5иэводительности работы за счет повышения точности автоматического выходашпуров на одну плоскость,На чертеже показана кинематическая схема предлагаемого манипулятора, 10Манипулятор включает бурильнуюмашину 1, стрелу 2, Следящее устройство выполнено в виде шарнирногомногозвенника с базовым трехшарнирнымзвеном 3, каждый шарнир которого 15имеет поводки 4 - 6,...
Манипулятор

Номер патента: 1378234
Опубликовано: 30.04.1990
Авторы: Семенов, Яковлев, Ямпольский
МПК: B25J 11/00
Метки: манипулятор
...и устранение зазоров в механизме перемещения корпуса манипулятора.Существо изобретения поясняется чертежом.Манипулятор содержит основание 1 с закрепленным на нем приводом 2, который приводит вовращение кривошип 3, связанный через шатун 4 с подвижным корпусом 5, на котором расположен исполнительный орган,Механизм уравновешивания корпуса 5 вы полнен в виде вертикальных стоек б и упругих пластин 7, соединенных с этими стойками и корпусом. Упругие пластины 7 имеют Ш-образную форму и закрепляются средними лепестками к корпусу 5, а крайними - к вертикальным стойкам б. В свободном состоянии средние лепестки пластин 7 образуют угол с ее крайними лепестками, т.е. предварительно сдеформированы.Манипулятор работает следующим образом.По...
Манипулятор

Номер патента: 1562127
Опубликовано: 07.05.1990
Метки: манипулятор
...служит стойкойдля последующего параллелограмма. Дпякинематической связи параллелограммов на кривошипе 21 закреплен шкив24, на кривошипе 25 закреплен шкив26. На шкивах 24 и 26 закреплены концы элемента 27 гибкой связи, перекрестно охватывающей оба шкива, К шатуну 28 присоединен рабочий орган 29.Траверса 2, рычаги 30 и 31 и кривошип21 со шкивом 24 образуют один параллелограммный механизм, а рычаги 31 й 32, кривошип 25 со шкивом 26 и шатун 28 - другой параллелограммный механизм устройства вертикального перемещения рабочего органа 29. Рычаг 31 является общим звеном для обоих параллелограммов и шарнирно связан со шкивами 24 и 26Манипулятор работает следующим образом.При включении привода 15 получают вращение распределительные валы 14 и 18,...
Манипулятор

Номер патента: 1563966
Опубликовано: 15.05.1990
Авторы: Бредихин, Соколянский, Шмырев
МПК: B25J 11/00, B25J 9/10
Метки: манипулятор
...с возможностью вращения междубуртом 25 вала 14 и ограничительнымпружинным кольцом 26 с помощью упорного подшипника 27 и колец 28. На несущей части 24 закреплен поводок 29,контактирующий роликом 30 с цилиндрическим кулачком 22. Кронштейн 23 удерживается от поворота относительно вала 14 штифтом 3 1, размещенным однимсвоим концом в вертикальных направляющих 32, выполненных в корпусе 1, адругим концом жестко закрепленным наповодке 29. С целью уменьшения перекосов и давления на вал .14 в устройствеможет устанавливаться второй поводок33 и второй кулачок 34 (см. фиг.4),размещенный внутри кулачка 22 и имеющего одинаковое расстояние между ниж 4ней и верхней рабочей поверхностью.Исполнительное устройство 15 поджима -ется к кулачкам 22 и 34...
Манипулятор

Номер патента: 1563969
Опубликовано: 15.05.1990
МПК: B25J 1/02, B25J 11/00
Метки: манипулятор
...(фиг.4)1= Н-Ь, 1 =1+ 2 й - М, где 1 и 1 - расстояния от центровзахватных устройств 3и 4 до осей шарнировподвеса жестко связанных с ними звеньев 12;Н - высота уровня оси шарнира 5 кривошипа исполнительного устройства 1над уровнем пола;Е - отношение веса заготовки к весу детали;Й - расстояние между осямишарниров 5 и 6 исполнительного устройства 2;М - расстояние между осямишарниров 5 и 6 исполнительного устройства 1.63969 6После этого заготовка устанавливаетсяв патрон, а деталь опускается на наклонную плоскость 16 и оператор, преодолевая только трение в шарнирах, переводит разгруженный манипулятор висходное положение.Шарнирное соединение с тягами 10звеньев 12 позволяет отклонить оси 10 последних от вертикали с целью облегчения снятия...
Манипулятор

Номер патента: 1563970
Опубликовано: 15.05.1990
Авторы: Купцов, Лемберанский
МПК: B25J 11/00
Метки: манипулятор
...за счет обеспечения независимого перемещения губок захватаНа чертеже представлена схема манипулятора. М анипулятор содержит основание 1, на котором шарнирно установлена куиса 2 с захватом 3. Кулиса 2 снабена приводом 4 ее поворота. Внутри ,кулисы 2 на направляющих 5 установрен ползун 6, На последнем закреплен палец 7, взаимодействующий с пазом 8 кулисы 2. Палец 7 контактирует с,ополнительной кулисой 9, установлен ,ной на основании 1 с помощью шарнирно-винтового соединения 10. На кулие 9 установлены регулируемые упоры 11, Они перемещаются винтами 12. Зах 1 ат 3 выполнен из шарнирно связанных Губок 13 и 14 . Губка 13 жестко связаНа с .ползуном. С губкой 14 шарнирно соединен шатун 15, на котором винтовым оединением установлен...
Манипулятор

Номер патента: 1565674
Опубликовано: 23.05.1990
МПК: B25J 9/00
Метки: манипулятор
...1. Вицт 35 своими Кон я чс 51:э 1 Васт;3 Вд пори Н 5 38, Оорязукцеце ( корпусом 28 полости 39 и 40.1; йк 36 ц,)7 , ст;чов,1 ец В ко,) 1) с( поср(л(ВОМ процин 4111 цт; н цс ц цо. нсти 15 и6. 22 и 2;.30 и 31, я тк)кс НО,001 И Зс и 40 оляет(.51 посНл(твом коччуЯиий 2.ЪЬПпчг 53 Ор работ;: т л 1,) ющим образом.,ге 15 эс 1 х 1 я тс рузя л 13,1 с.Н 1. рябоОй жидкстц Г 0 е;етс 51, цд ри чср, полост 39 (с 1 иг. 2). Винт 35 ол В истцем .ЯВЛЕНИ 51 ц 1 ПориЕНЬ8 В НОГ)СТИ 3, П.рс- сИ 3(се 51 ЭЛСЭО (30 Ртсжм) .ГдКи 36 и 37 эяж 3 ьх рычагов 11, олця из которых имеет левую, я втрая правую резьбы, за счет взаимолействия с винтом 35 вращаются в разных направлениях, перемеиают соответствецно закрец ленные ня них зяжимцые рычаги 11. При этом груз...
Манипулятор

Номер патента: 1565677
Опубликовано: 23.05.1990
Авторы: Бергер, Диневич, Коренчук, Моцьо
МПК: B25J 11/00
Метки: манипулятор
...работает следующим образом.При повороте выходного вала привода 3 осуществляется поворот всей установленной на Валу системы состоящей из ВОди ч 40 4, сателлитов, ползуна 9 и рейки 7 с исполнительным органом 8, так как водила 4 жестко закреплены на выходном валу с помощью ВинтОВ 11.При этом нижние сателлитные колеса 5 обкатываются вокруг неподвижного 45 центрального колеса 2, что приводит к вра 1 цению верхних колес 6, входян 1 их в зацепление с рейкой 7.Это вызывает дополнительное прямолинейное перемещение рейки 7 вдоль ползуна 9. В результате схваты исполнитель ного органа 8 перемешаются по незамкнутой криволинейной траектории.Форма этой траектории определяется параметром 1 - расстоянием от оси выходного вала привода 3 до рейки 7....
Манипулятор

Номер патента: 1565686
Опубликовано: 23.05.1990
Авторы: Гонохов, Итович, Кушманов, Кушманова, Сажко
МПК: B25J 18/00
Метки: манипулятор
...из элементов 25 криволинейной коробчатой формы, Два ближних к каркасу 5 элемента 25 соединены с горловиной 26 с уплотнительным элементом по сопрягаемом с каркасом 5 илй корпусом узла ротацни 7 отверстию. Элементы 26 кожуха 24 могут перемещаться относительно один другого по дуге окружности до упора стенок 27 смежных элементов 25. Ближние к платформе 3 элементы 25 закреплены жестко на щеках 20.Манипулятор снабжен аппаратурой и средствами управления, следящими приводами, зрительным сенсором и может работать по программе с дистанционно-автоматическим (или копирующим) управлением.Манипулятор работает следующим образом.После перемещения ходовой части манипулятора (не показана) непосредственно в зону работы с помощью зрительного...
Уравновешенный манипулятор

Номер патента: 1567370
Опубликовано: 30.05.1990
Автор: Кордашенко
МПК: B25J 1/02, B25J 11/00
Метки: манипулятор, уравновешенный
...горизонтальных осей, имотя не.уравновепенные массы этих звеньев 1 и 2.Звено 1 может вращаться нд угол, больций180. (фиг. 2).11 ри нахождении звеня 1 в секторе 1(фиг, 2) имеют место положительные опрокилывающие моменты. Нри нахожлениизвена 1 в секторе 2 возникают мочецтыс противоположным знаком.Уравновешивание звена 1 при нахожлении его в секторе 1 при неподвижном звене 2происходит следующим образом.На кулачок 6 через промежуточный ролик действует пружина 8, созлавая момент,равный по величине (но с противополокным знаком) опрокилывающему моментузвена 1. Уравновешивание звена 1 при цеполвижцом звене 2 и при нахождении его в секторд( 2 (фИГ 2) ПрОИСХ(пнт От ВОЗЛЕй(ТВИЯ пружины 7 на кулачок 5 црез прочежуточ.ный ролик Кулачки 5 и 6...
Манипулятор

Номер патента: 1569220
Опубликовано: 07.06.1990
Автор: Ющенко
МПК: B25J 3/02, B66C 23/14
Метки: манипулятор
...проушины 13 - 20. Крайнее звено 2но с шарниром 11 проушинами 21, х;айнее звено 3 соединено с шарниром 12 проушинами 22. Среднее звено 4 свободными концами стержней Ч-образного профиля соединено с шарниром 9 проушинами 23. Рабочий орган, в данном случае захват 24, выполненный из двух захватных элементов, прикреплен к соединительным элементам 7 и 8. На раме 1 установлен привод 25, имеющий гибкий орган 26, связанный со средним звеном 4. Крайнее звено 2 соединено с рамой 1 шарнирами 27 и 28, крайнее звено 3 - шарнирами 29 и 30, среднее звено - шарниром 31. Звенья с рамой и соединительными элементами образуют шарнирный параллелограмм.Манипулятор работает следующим образом. Привод 25 тянет гибкий орган 26, которыйй тянет допол...
Манипулятор

Номер патента: 1569221
Опубликовано: 07.06.1990
Авторы: Агаджанова, Краснов, Малов, Мартьянов, Хакимджанов
МПК: B25J 9/00
Метки: манипулятор
...и 13 выполнены с криволинейными пазами 17. взаимодействую нимис роликами 15. На плите 13 закрепленоконическое зубчатое колесо 18, зацепляющсеся с коническими зубчать,ми колесами 19и 20. Колесо 19 связано своим валом 21через зубчато-реечную передачу 22 с исполнительным органом 1. Он представлен в видефиксатора 23 и монорельса 24 с отверстиями 25. От колеса 20 через вал 26 движение передается исполнительному органу 2,который выполнен в виде зубчатого колеса 27 и зубчатой рейки 28. Исполнитель ный орган 3 приводится в движение толкателем 29 кулачка 30. Толкатель 29 снабжен возвратной пружиной 31.Манипулятор работает следующим образом. От кулачка 6 через толкатель 7 поступательное движение сообщается плитам 10 и 11. Блок управления (не...
Манипулятор

Номер патента: 1569222
Опубликовано: 07.06.1990
Авторы: Лошкарев, Мещеряков, Постаногов, Соловьев
МПК: B25J 15/04, B25J 9/00
Метки: манипулятор
...среды (не показано) в аэрсстатицеские опоры 48 может быть любыы из известных стандартных устройств.Цепи 7 установлены на звездочках 49и 50. Звездочки 49 сыонтировань На вас 51 привода 52 перемещения цепи 7.Манипулятор работает следующим обраЗОМ.В магазин ус"ацавливается необходимый 35 комплект инструментов. Для установки необходимого инструмента подается рабочая среда, например воздух, в поршневую полость сис овсго цилиндра 38. Поршень 37, перемешаясь под действием рабочей среды, иСоком 39 сдвигает втулку 34, сжимая пружину 4 и освобождая шлицевой конец 13 вяла1. Поступающая В штоксвые по,Ости 32 рабочая среда сдвигает поршни 29 к центру силовых цилиндров 28, сжимая пружины 30 и смецая штоки 27. Последние 45 выходят из контакта со...
Манипулятор
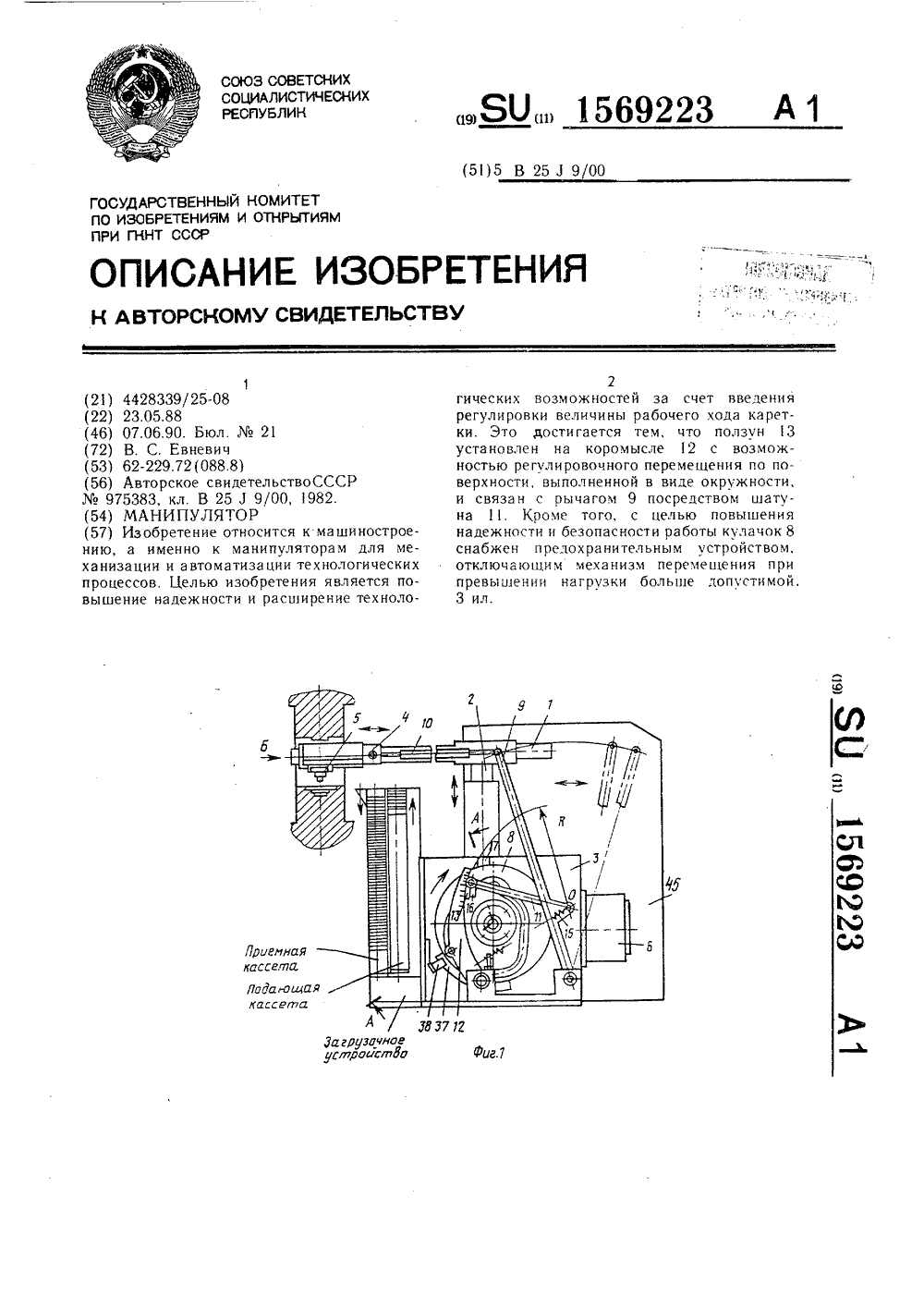
Номер патента: 1569223
Опубликовано: 07.06.1990
Автор: Евневич
МПК: B25J 9/00
Метки: манипулятор
...уорь 2,", которые установлены на втулках 26. Р осевом направлении кулачок и олумуфта 21 зафиксированы шайбой 27 с винтом 28 и стопорной шайбой 29, а также фланцем втулки 30, контактируюьсим с шайбой 31. Полумуфта 22, шайба 27 и втулка 30 зафиксировань цтиста 32 - 34,1 О 5 20 и 30 35 40 45 50 55 Редуктор 7, закрепленный в корпусе 3 и связанныч с двигателем 6, и втулка 30, установленная на выходном валу 35 редуктора 7, центрируются соосно с кулачком 8 в опоре 36. Флажок 37, взаимодействующий с датчиком 38 управления работой технологического оборудования, установлен на торце кулачка 8.Каретка 4 (фиг. 3) снабжена четырьмя верхними роликами 39 и 40, установленными попарно на осях 41, и четырьмя нижними роликами 42 и 43, установленными...
Резонансный манипулятор

Номер патента: 1572801
Опубликовано: 23.06.1990
Авторы: Политов, Серов, Чернов
МПК: B25J 9/00
Метки: манипулятор, резонансный
...М у штоком 6 и цилиндром 2 установ О л н упругий элемент (пружина) 8, а к рпус 1 механической руки через шар н р 9. связан с основанием. Кроме того, н гидроцилиндре установлен датчик 10 п ложения штока 6, а на корпусе 1 - 25 д тчик 11 знака скорости перемещения механической руки, при этом шарниры 7 и 9 расположены по оси силовогоиндра и механической руки при нейтральном положении этой руки (точка А).Манипулятор работает следующим образом.Первоначально корпус 1 механичесКой руки находится в положении точКи В и Фиксируется запертой в полости цилиндра 2 жидкостью. При этом 1 ружина 8 растянута, поршень со штоком выдвинут до упора в крышку гидроцилиндра 1, Усилию пружины 8, стре мящийся вернуть корпус 1 в среднее положение (точка А),...
Манипулятор
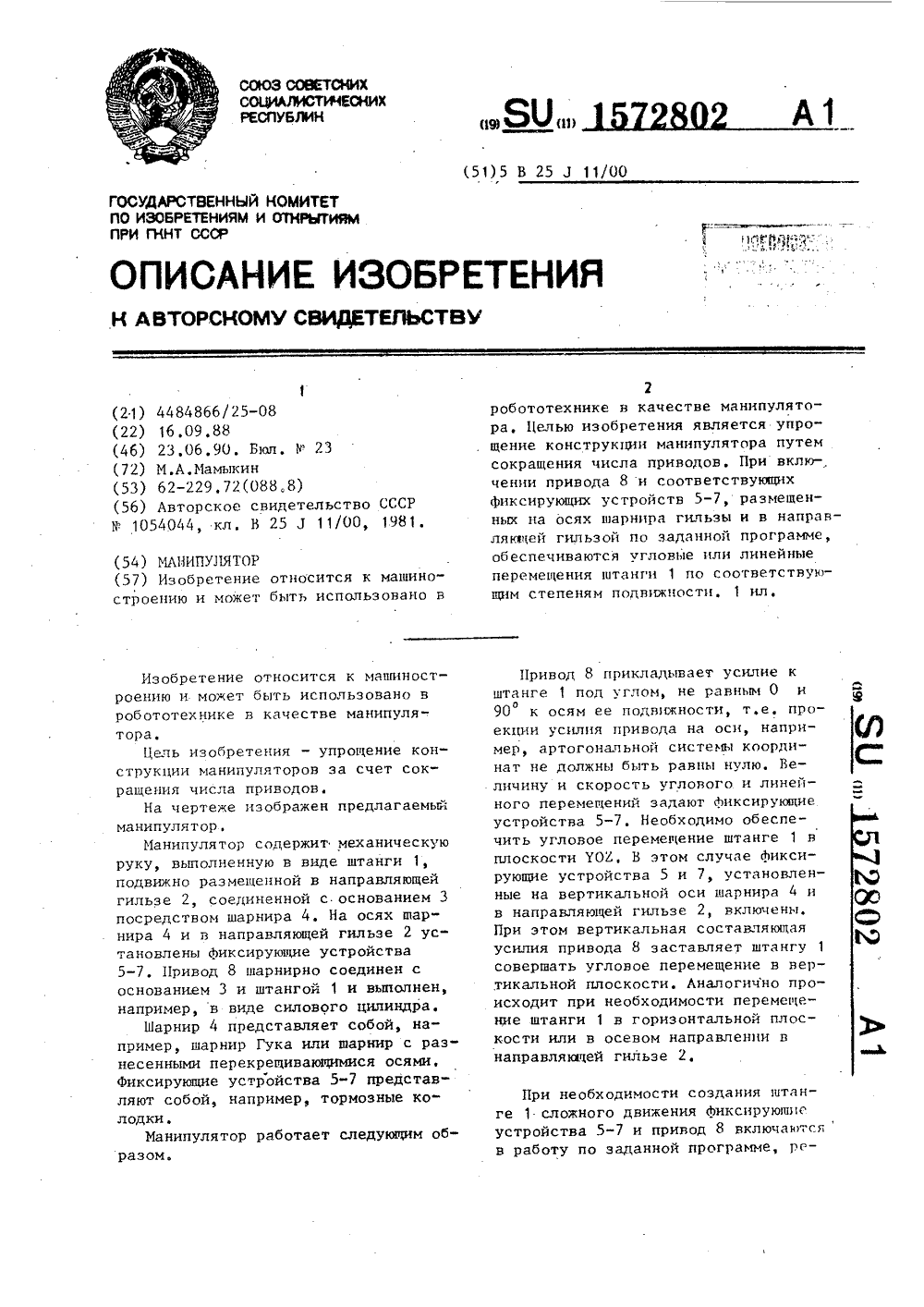
Номер патента: 1572802
Опубликовано: 23.06.1990
Автор: Мамыкин
МПК: B25J 11/00
Метки: манипулятор
...цилиндра.Шарнир 4 представляет собой, например, шарнир Гука или шарнир с разнесенными перекрещивающимися осями,Фиксирующие устройства 5-7 представляют собой, например, тормозные колодки,Манипулятор работает следующим обр бототехнике в качестве манипулятора, Целью изобретения является упрощение конструкции манипулятора путем сокращения числа приводов. При включении привода 8 и соответствующих Фиксирующих устройств 5-7, размещенных на осях шарнира гильзы и в напра ляющей гильзой по заданной программе обеспечиваются угловые или линейные перемещения штанги 1 по соответствую щим степеням подвижности, 1 ил,екции усилия привода на мер, артогональной систе нат не должны быть равнь личину и скорость углово ного перемещений задают устройства...
Манипулятор

Номер патента: 1576302
Опубликовано: 07.07.1990
Авторы: Здоровцев, Козак, Петровский
МПК: B25J 1/00
Метки: манипулятор
...в виде звеньев 6, расположенных в параллельных плоскостях и соединенных между собой шарнирами 7, причем первое звено 6 каждой шарнирной цепочки 3 связано с выходным валом привода 8 перемещения, установленного на поворотном звене 2, а последнее звено 6 закреплено на соединительной опоре 4. Для увеличения подвижности рабоче" го органа 5 первые и последние звенья 6 шарнирных цепочек выполнены различ- З ной длиныНапример, при плоскостно- поворотном схвате первое (от звена поворота) и последнее (к звену схвата) звенья 6 одной из шарнирных цепочек выполняются по длине в два ра 40 за короче, нежели каждое иэ остальных звеньев шарнирных цепочек. При объемноповоротном исполнении длины указанных звеньев 6 соответственно составляют одну, третью...
Манипулятор

Номер патента: 1576307
Опубликовано: 07.07.1990
Автор: Белов
МПК: B25J 11/00
Метки: манипулятор
...цепь 7Вместо50срезного штифта 17 может быть использован подпружиненный фиксатор,цто обеспечивает многократность егосрабатывания без замены, Манипулятор55должен снабжаться комплектом узлов10 с различными величинами изгиба унаправляющей 18. На цепь 7 могут устанавливаться несколько узлов 10,что позволит получить сложную конфигурацию изгиба цепи 7. На узле 11 крепления имеются отверстия 19 для закрепления на нем растяжки и при необходимости кабеля (не показаны). Растяжка препятствует случайному повороту звеньев цепи 7.Привод 12 возврата узлов измеиени 1 направления перемещения выполнен в в виде лебедки и канатов 20, связывающих корпуса 15 узлов изменения направления перемещения цепи 7 с лебедкой.Манипулятор работает следующим...
Манипулятор

Номер патента: 1576314
Опубликовано: 07.07.1990
Автор: Кудрявцев
МПК: B25J 18/00
Метки: манипулятор
...11 и 12, работающих в паре,и направляющий усеченный конус 13,установленный на валу и кинематически "вязанный с приводом 14, Роликпосредством зубчатой передачи 15связан с приводом 10, Кроме того,на механической руке 7 с возможностью перемещения размещены дополнительные направляющие механизмы 16.Дополнительный направляющий механизм16 содержит рамку 17, включающую дванаправляющих усеченных конуса 18 и19, и два Фрикцирнных ролика 20 и 21,При этом конус 18 неподвижно закреплен на рамке 17, а конус 19 закрепленна кронштейне 22, шарнирно связанномс рамкой 17 и кинематически связанномс приводом 23, Фрикционный ролик 21кинематически связан с приводом 24.Манипулятор работает следующимобразом,В исходном состоянии плоская упругая лента 5 намотана...
Буровой манипулятор

Номер патента: 1578327
Опубликовано: 15.07.1990
Авторы: Велижанина, Давыдов, Дворников, Мифтахутдинов, Степанов
МПК: E21D 9/10
Метки: буровой, манипулятор
...закрепленными соответственно на шарнирах 4 и 5. Внутри вала 6 размещен карданный вал 11, на концах которого жестко установлены зубчатые конические колеса 12. и 13, входящие в зацепление с дополнительными зубчатыми колесами 14 и 15, жестко закрепленными соответственно на шарнирах основания 2 и оголовка 3. Подъем и поворот стрелы 1 производится гидроцилиндрами (не показаны). На оголовке 3 уста,5 новлена бурильная машина (условно показана стрелкой). Карданный вал 11 соединен посредством вращательных кинематических пар с шарнирами 4 и 5 основания и оголовка. Геометрические 2 лчцентры крестовин карданных шарниров расположены соответственно на геометрических осях вращения зубчатых колес 9 и 10, которые .закреплены на шарнирах 4 и 5 основания и...