Патенты с меткой «манипулятор»
Манипулятор

Номер патента: 1321581
Опубликовано: 07.07.1987
МПК: B25J 11/00, B25J 15/04
Метки: манипулятор
...команда на взятие схвата, Для этого магазин 19, поворачиваясь вокруг вертикальной оси, предоставляет нужный для работы схват 21 в позицию смены, Затем подается давление в левую полость горизонтально расположенного силового цилиндра и его подвижный корпус 9 перемещает"- ся вправо (по чертежу). При этом рука 1 вместе с вилкой 3 на рычагах 7 и 8 опускается в нижнее положение,Геометрические параметры параллелограммного механизма подобраны так, что горизонтальное перемещение осей крепления рычагов 7 и 8 (боковых звеньев) к вилке 3 (основному звену) при движении корпуса 9 (второго основного звена параллелограммного механизма) равно и противоположно направлено горизонтальному перемещению осей 15 крепления рычагов 7 и 8 к подвижному корпусу...
Шахтный самоходный манипулятор

Номер патента: 1321824
Опубликовано: 07.07.1987
МПК: E21D 13/04
Метки: манипулятор, самоходный, шахтный
...элементами 9 - 14 и 3 соединены дополнительные гидроцилиндры 17 - 23, каждый из которых образует при фиксации заданного положения портала с соответствующей па- н 5 10 15 20 25 30 35 40 45 50 ворота в Вертикльной плоскости от подъемных гидроцилиндров 29 и 30, соединяющих второй борт транспорта 26 с телескопическими гидроцилиндрами 11 и 12.Кроме того, манипулятор включает фонарь 39, отбойный молоток 40, транспортное средство 41, например, породопогрузочную или буровую машину, сменную опору 42, движитель 43 приводного колесного блока.Работу шахтного самоходного манипулятора рассмотрим на примере выполнения с его помощью операции по транспортной развязке с технологическим, оборудованием, например породопогрузочной машиной, а также по...
Стержневой манипулятор

Номер патента: 1323361
Опубликовано: 15.07.1987
Авторы: Гамрекели, Наруслишвили
МПК: B25J 1/00
Метки: манипулятор, стержневой
...с двуплечим рычагом 21 через две сферические кинематические пары А и В. Сферический шарнир Б с рукояткои С жестко связан с втулкой 22, в которой проходит направляющий стержень 23. Центр сферического шарнира В совпадает с центром вращения кривошипа ОА. Шарнир Б крепится на корпусе 2 винтом 24. Между втулкой 22 и стержнем 23 имеется принудительное сопротивление, На стержне 23 жестко закреплены ограничитель 25 и губка 26. Шарнирно связанный со стержнем 23 рычаг 21 снабжен губкой 27 Предлагаемый манипулятор работает следующим образом.При включении привода начинает вращаться вал 1 с зубчатым колесом 3 и зубчатое колесо 4, вместе с кото- . рым вращается ползун 5, Последний вращает относительно оси ОО коничес 3 13233 кое зубчатое колесо 7,...
Манипулятор

Номер патента: 1323362
Опубликовано: 15.07.1987
Автор: Литвиненко
МПК: B25J 1/00
Метки: манипулятор
...системе координат.Целью изобретения является упро,щение конструкции.На фиг. 1 изображен манипулятор,общий вид; на фиг, 2 - сечение Л-Ана фиг. 1,Предлагаемый манипулятор состоитиз руки 1 со схватом 2, двух групп3 и 4 линейных двигателей, расположенных в параллельных плоскостях,каждая из которых включает расположенные попарно и взаимно перпендикулярно двигатели 5, 6, 1 и 8,Между концом руки 1 и корпусом 9расположен дополнительный двигатель10. Каждый из двигателей выполнен нвиде трубки из эластичного материала,образующей петлю, стороны которойскручены между собой при этом средняя часть петли через шарнир 11 сня".заца с рукой 1, а ее концы закреплены на корпусе 9, Один конец трубкизаглушен, а другой - связан с источником давления рабочей...
Манипулятор

Номер патента: 1323363
Опубликовано: 15.07.1987
Автор: Литвиненко
МПК: B25J 1/00
Метки: манипулятор
...обмотку 8, намотанную накаркас 9, стороны которого, находящиеся между полюсами злектромагт"тов, расположены под углом к осд,;ски 3 манипулятора. Обмотка 8 з-крсплена ца штоке 10, который черезшарнир 11, обеспечивающий его поворот гокруг оси параллельной осируки манипулятора, св.-,:зац с рукойманипулятора, Электромагнит 11 б и 7каждого двигателя также связаны черезшарнир 12 с корпусом 1.Предлагаемььй манипулятор работаетследующим образом.При создании электромагнитамиб имагнитных потоков, имеющихсогласное направлениеца частях обмотки 8, расположениях между полюсами этих электромагнитов при протекании по ней тока, возникают усилия,обеспечивающие ее перемещение в направлении, перпендикулярном оси ру 3363 2ки 3, так как горизонтальные...
Манипулятор

Номер патента: 1323366
Опубликовано: 15.07.1987
Авторы: Демидов, Калманович, Сычков
МПК: B25J 11/00
Метки: манипулятор
...15 корпуса редуктора 4, а на рейках 7 закреплень 1 исполнительные органы 16,Манипулятор смонтирован на передвижном транспортном срсдстве 17 посредством кронштейна 18 Положение С тЕ 11 аот Ц ОСЕВОМ НаПРаВЛЕНИИ РЕйК;1 6, КьтгцттиятгЕЧЕСКИ СВНЗацНЫЕ С НИ- ми посредством редукторов 4 рейки 7, на которых закреплены исполцительцыс органы 1 б, перемешаются в том же нЯГ 1 РЯБЕгсцг 111 т тто и Рейки 6 но с другой скоростью и другой величиной хт.я,. 4 ил. ьгянгцтулятора в пространстве регулитгуется привода 11 е 1 1 т и 20,Предлагаемыц 1 е нигтулятор работаетследующим образом,Вначале привоцам 11 19 и 20 и транспорте 1 ым средством 117 исполцительныеорганы 16 манипулятора выставляютсяОтцосительно окряшиваемой поверхности, далее Включается...
Автоматический манипулятор

Номер патента: 1323380
Опубликовано: 15.07.1987
МПК: B25J 21/00
Метки: автоматический, манипулятор
...каретки 8.Гибкие ленты 21 и 27 выполнены с перфорацией по всей длине с числом строк, соответствующим числу команд, определяющих местоположение каретки 8 и исполнительного устройства 14. Вдоль трассы протяжки гибких перфорированных лент 21 и 27 по обе стороны расположены пять датчиков 31 контроля, которые представляют собой спаренные осветитель и фотоприемник и являются датчиками перемещения тележки 1, каретки 8 и исполнительного устройства 14. Гибкие перфорированные ленты 21 и 27 выполнены из токопроводящего материала и изолируется от каретки и тележки. Автоматический манипулятор рабо- . тает следующим образом.Сформированная для обработки партия заготовок в специальных многоместных кассетах подается через шлюз рабочей камеры на...
Манипулятор

Номер патента: 1324843
Опубликовано: 23.07.1987
Автор: Сморчков
МПК: B25J 11/00
Метки: манипулятор
...орган 11, Звенья9 выполнецы в виде двуплечих рычагов, 30прглем на оси 12 шарнира, соединяющего звенья 6 и 9, смонтированы ролики 13, Звено 10 выполнено в виде.противовеса, состоящего иэ наборныхэлементов, соединенных со звеном 5 35посредством оси 14 и втулок 15, стягой 7 - посредством оси 16 подшипника 7 и распорных втулок 18, а между сооой - посредством стяжки 19,40В корггусс 3 выполнены вертикальные 20 и горизонтальные 21 направляю.г 1 гие причем в направляющих 20 размещены ролики 22, смонтированные ца поворотной стойке 2, а в направляющих 21 - ролики 3,Манипулятор работает следующимобразом,Подъем груза захватным органом 11осуществляется включением силовогоцилиндра 4, шток которого выдвигается и перемещает корпус 3 вдоль стойки 2....
Манипулятор лесозаготовительной машины

Номер патента: 1324995
Опубликовано: 23.07.1987
МПК: A01G 23/08, B66C 23/64
Метки: лесозаготовительной, манипулятор
...6. В ступенчатом отверстии со стороны лебедки 8 установлена система цилиндрических пружин сжатия, состоящая из наружной 10, внутренней 11, одной или нескольких промежуточных 12 пружин, установленных одна в другую при помощи стаканов 13. Стаканы выполнены с буртиками 14, величина которых равна диаметрам проволоки пружин. Наружные диаметры пружин выполнены меньше диаметров соответствующих ступеней отверстия стрелы,Манипулятор лесозаготовительной машины работает следующим образом.Самоходное шасси 4 заезжает на технологический коридор или тракторный волок и поворачивает стрелу 1 манипулятора на колонне 3 в сторону дерева, подлежащего трелевке. Хвостовик 6 захвата 2 при этом установлен в направляющих 7 стрелы 1, внутренняя пружина 11...
Частотный манипулятор

Номер патента: 1325716
Опубликовано: 23.07.1987
МПК: H04L 27/12
Метки: манипулятор, частотный
...образом.Блок 23 сравнения сравнивает уровни сигналов, поступающих на его входы с выходов фильтров 13 и 14, и выдает на своем выходе сигнал логической единицы, если уровень сигнала фильтра 13 превышает уровень сигнала фильтра 14. Выходной сигнал блока 23 сравнения подается на первый вход блока 20 управления, на второй вход которого поступает синхронизированный информационный сигнал логической единицы.В случае совпадения логических уровней сигналов на первом и втором входах блока 20 управления на первом выходе формируется сигнал логической единицы, который синхронно с тактовым импульсом, действующим на перном входе блока 18 установки, устанавливает ключ 21 в открытое состояние, При этом сигнал высокого уровня с выхода фильтра 13 подается...
Манипулятор

Номер патента: 1328186
Опубликовано: 07.08.1987
Авторы: Давыдов, Каминский, Языков
МПК: B25J 9/00
Метки: манипулятор
...посредством несамотормозящейся винтовой передачи, винтовая передача снабжена средством ее блокировки, а направляющая выполнена в виде установленных с возможностью свободного вращения роликов, оси которых параллельны оси подвижного звена. ЗО 2 Фиа 2ВНИИПИ Заказ 3436/ 9Производственно-полиграфическо Тираж 952дприятие, г. Ужгород, ул Подписное роектная, 4 Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам, и может быть использовано для автоматизации загрузки технологического оборудования, преимущественно кузнечно-прессовых установок.Цель изобретения - упрощение конструкции.На фиг. 1 показана схема манипулятора; на фиг. 2 - то же вариант выполнения.Манипулятор содержит корпус 1, привод 2...
Манипулятор

Номер патента: 1328187
Опубликовано: 07.08.1987
Авторы: Звонарев, Кудряшев, Ли
МПК: B25J 9/00
Метки: манипулятор
...7 передается через блок зубчатых колес на зубчатое колесо 9, главный вал 8, на пазовый кулачок 20 и кулачок 1 О. Последний обеспечивает при своем врагцении вертикальное перемещение плеча 2 манипулятора вверх с помощью ролика 11, обкатывающего профиль кулачка 1 О, и толкателя 12, при этом сжимается пружина 3, а от вращения толкатель 12 удерживается пальцем 14, чем обеспечивается правильное взаимодействие ролика 11 с кулачком 10, при котором ось ролика 11 должна быть параллельна оси главного вала, При подъеме плеча 2 вверх упор 31 плеча скользит по дополнительному упору 33. Условие параллельности поверхностей этих упоров относительно оси поворота плеча 2 обеспечивает необходимую точность позицио нирования. Вращение пазового кулачка 20...
Стержневой манипулятор

Номер патента: 1328190
Опубликовано: 07.08.1987
Авторы: Гамрекели, Наруслишвили
МПК: B25J 11/00
Метки: манипулятор, стержневой
...и трех промежуточных зубчатых колес 6, 7 и 8, причем последние два колеса смонтированы на поворотном рычаге 9 который зафиксирован относительно корпуса стопором 1 О. Механическая рука 2 снабжена захватом, состоящим из неподвижной губки 11 и шарнирно связанной с ней и подпружиненной подвижной губки 12.Механическая рука шарнирно связана с двумя стержнями 13 и 14, Стержень 14 совместно с двуплечим рычагом 15 образует механизм подъема руки 2. Стержень 13 шарнирно связан с корпусом и выполнен полым. В его центральном отверстии размещен гибкий элемент 16, связанный одним своим концом с подвижной губкой 12 захвата, а другим - с рычагом 17. В средней своей части стержни 13 и 14 размещены в отверстиях сферических шарниров 18 диаметрально...
Манипулятор для сварки труб и отводов

Номер патента: 1329939
Опубликовано: 15.08.1987
Автор: Царев
МПК: B23K 37/04
Метки: манипулятор, отводов, сварки, труб
...в процессе ,сварки.На фиг. 1 изображен манипулятор для сварки труб, общий вид; на фиг. 2 - разрез А - А на фиг. 1; на фиг. 3 - вид В на фиг, 1.Манипулятор для сварки труб содержит основание, на котором установлены стойка 1 с приводом 2 вращения изделия и роликоопоры 3.Привод 2 вращения изделия содержит планшайбу 4 и разъемный хомут 5, соединенные между собой с помощью стержней 6 и осей 7, расположенных в двух взаимно перпендикулярных плоскостях.Планшайба 4 снабжена штангой 8, на которой установлен с возможностью фиксированного перемещения тарированный груз 9.Привод 2 вращения изделия смонтирован на стойке 1 с возможностью продольного перемещения с помощью роликов О.Роликоопоры 3 представляют собой роликовую гибкую гирлянду 11...
Манипулятор для извлечения изделий из технологических участков

Номер патента: 1329959
Опубликовано: 15.08.1987
Авторы: Аксенов, Бектимиров, Царев
МПК: B25J 5/02, B66C 11/06
Метки: извлечения, манипулятор, технологических, участков
...Составитель А. Букатов Редактор Е. Копча Техред И. Верес Корректор Л. Пилипенко Заказ 3523/7 Тираж 95 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 13035, Москва, Ж - 35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к манипуляторам, и может быть использовано при автоматизации процессов на операциях по транспортировке изделий в таре. Цель изобретения - упрощение конструкции,На фиг. 1 изображен манипулятор, общий вид; на фиг, 2 - сечение А-А на фиг. 1.Манипулятор для извлечения изделий из технологических участков содержит грузовую тележку 1, перемещающуюся по моно-...
Манипулятор

Номер патента: 1331638
Опубликовано: 23.08.1987
Авторы: Балод, Динабург, Кузьмин, Цыганкова, Чучин
МПК: B23Q 7/04, B25J 11/00
Метки: манипулятор
...правый захват расположен нал свободным гнездом многоместнон кассеты 1 О и удерживает обработаннук) деталь 11 (подпружиненные рычаги 33 разведены), а левый захват свободен (полпружиненные рычаги 33 сведены) и находится над гнездом с заготовкой 9.Под действием элскропривола (нс показан) начинается перемещение ползунд 5 влево по направляющим 4 относительно каретки 3 (поз 1 циклограммы фиг. 3). В(О процессе указанного перемещения ползун 5посредством шатуна 17 через кчлису 19 поворачивает кривошип 16, вал 5 и кулдчок 22 по часовой стрелке, преодолевая усилие пружины 21.За счет взаимолействия пальца 24 сфигурным пазом 25 кулачка 22 начинает опускаться левый консольный конец рычага 23, поворачиваясь на оси 26 и освобождая раму, которая под...
Манипулятор

Номер патента: 1333567
Опубликовано: 30.08.1987
Авторы: Андреев, Мачабели, Снеховский, Фарберова, Френкель
МПК: B25J 5/00
Метки: манипулятор
...28 другого цилиндра 23,Захватный орган 29, соединенныйс выходным элементом 25 силовогоцилиндра 23, выполнен в виде траверсы 30, на балке которой установленырегулируемые по высоте самоустанавливающиеся вакуумные захваты 3 1 изажимные днуплечие рычаги 32,связан 133356750 ные шарнирно со штоками 33 силовыхцилиндров 34. Для фиксации устанавливаемого,изделия 35 с плоской поверхностью 36 у пола и потолка выполне 5ны соответствующие опорные элементы37 и 38.Манипулятор работает следующимобразом.Производится технологическая операция - монтаж стеновых перегородок,представляющих собой иэделие 35прямоугольной формы с отношениемширины к длине 1;10, расположенныхв стопе,По заданной программе (при наличии системы программного управления)или от...
Манипулятор

Номер патента: 1333570
Опубликовано: 30.08.1987
Авторы: Набиев, Савин, Шваченко
МПК: B25J 9/06
Метки: манипулятор
...ключи 29 и 30, и источник 35 высокочастот ного напряжения отключается от фиксаторов 9 и 10, которые плотно прилегают к поверхности дисков 23 и 25 фрикционных элементов 11 и 13, препятствуя их вращению. Аналогично, если фиксатором является электрореологи ческая жидкость, то на выходах схемы И-НЕ 31 и 32 устанавливаются единичные сигналы, которые открывают управляемые ключи 29 и 30, и источник постоянного напряжения 35 подключает ся к фиксаторам 9 и 10, поэтому вязкость жидкости между фольгой 27 и корпусом 6 шарнира максимальна, и возникающие силы вязкого трения фиксируют положение дисков 23 и 25 фрик ционных элементов 11 и 13 относительно корпуса 6. Положение диска 24 также фиксировано, так как упругие элементы 26 препятствуют его...
Манипулятор для отделочных работ

Номер патента: 1333572
Опубликовано: 30.08.1987
МПК: B25J 11/00, E04F 21/08
Метки: манипулятор, отделочных, работ
...30, жестко посаженной на одной оси 31 с шестерней 32, находящейся в зацеплении с шестерней 33,стоящей на одной оси 34 с рабочиморганом 4.Манипулятор работает следующимобразом.Устройство перемещают из одногообрабатываемого помещения в другоес помощью подвижного основания 1, Втранспортном состоянии каретка находится в крайнем нижнем положении,а поворотный рычаг повернут (сложен)во внутрь механизма, рабочий органснят. При этом высота стойки позволяет свободно переводить устройствочерез дверной проем. В помещении манипулятор устанавливают в заранеезапрограммированном месте, которымможет служить отверстие в потолкедля вывода проводов электропроводкиили технологические отверстия в полу,а при отсутствии таких отверстий -в специально...
Манипулятор

Номер патента: 1335444
Опубликовано: 07.09.1987
Автор: Литвиненко
МПК: B25J 9/00
Метки: манипулятор
...фиксации тяг с помощью электромагнитныхсил.На чертеже изображен манипулятор,разрез.Манипулятор имеет приводыпоступательного перемещения, к штокам которых прикреплены ферромагнитные тяги 2. Приводы закреплены на ферромагнитном основании 3. К основанию спомощью универсальных шарниров 4 присоединены звенья с пластинами 5, выполненные из ферромагнитного материала. Отверстия 6 служат для расположения в них ферромагнитных тяг. Вокругоснований шарниров расположены электрические катушки 7, выводы 8 которых подсоединены к источнику 9 тока,Манипулятор может иметь несколькопластин 5. На крайней из них закреплен схват 10,Манипулятор работает следующим образом.По командам системы управленияприводыосуществляют попарно натягивание и ослабление пар тяг...
Гибкий манипулятор

Номер патента: 1335455
Опубликовано: 07.09.1987
Автор: Капустин
МПК: B25J 18/06
Метки: гибкий, манипулятор
...с индивидуальными источниками подвода энерго но сителя, напримердавления,С целью передвижения гибкого элемента 3 относительно манипуляторапоследний состоит по крайней мере35из трех модулей 4 - 6, каждый из которых включает не менее чем по тридиска 1,Гибкий манипулятор работает следу 4 Оющим образом,Подается давление в одну из трубок 2, гибкий манипулятор плавно изгибается в .противоположную ат трубкисторону, Если подается одинаковоедавление одновременно во все трубки,гибкий манипулятор удлиняется без изгиба, При этом гибкий элемент 3, расположенный в центральных отверстиях дис.ков, мягко обхватывается гибкими трубками 2, при манипулировании плавно изгибается и не контактирует с краямидисков 1, что особенно важноеслигибкий элемент 3,...
Манипулятор для очистки железнодорожных полувагонов

Номер патента: 1335492
Опубликовано: 07.09.1987
Авторы: Вавилов, Иконников, Плюхин
МПК: B60S 3/00
Метки: железнодорожных, манипулятор, полувагонов
...Телескопический гидроцилиндр 8 останавливается в том случае, когда микропереключатель 57 замыкает параллельную ветвь нижней цепи управления верхнего электромагнита гидрораспределителя 53 и указанная цепь размыкается при обрабатывании кнопки 56, отключающей контакт 54. После этого программируемый контролер включает контакты, подающие напряжение на верхние электромагниты трехпозиционных гидрораспределителей 51 и 52, включающие в работу смонтированные на кронштейнах 9 два гидродвигателя 48, вращающих шестернями 49 зубчатые колеса 50 на валах щеток 7. Затем программируемый контролер включает контакт датчика 2 и кнопку 70 и через датчик 21 управляет верхним электромагнитом гидрораспределителя 26. Гидродвигатель 20, закрепленный в...
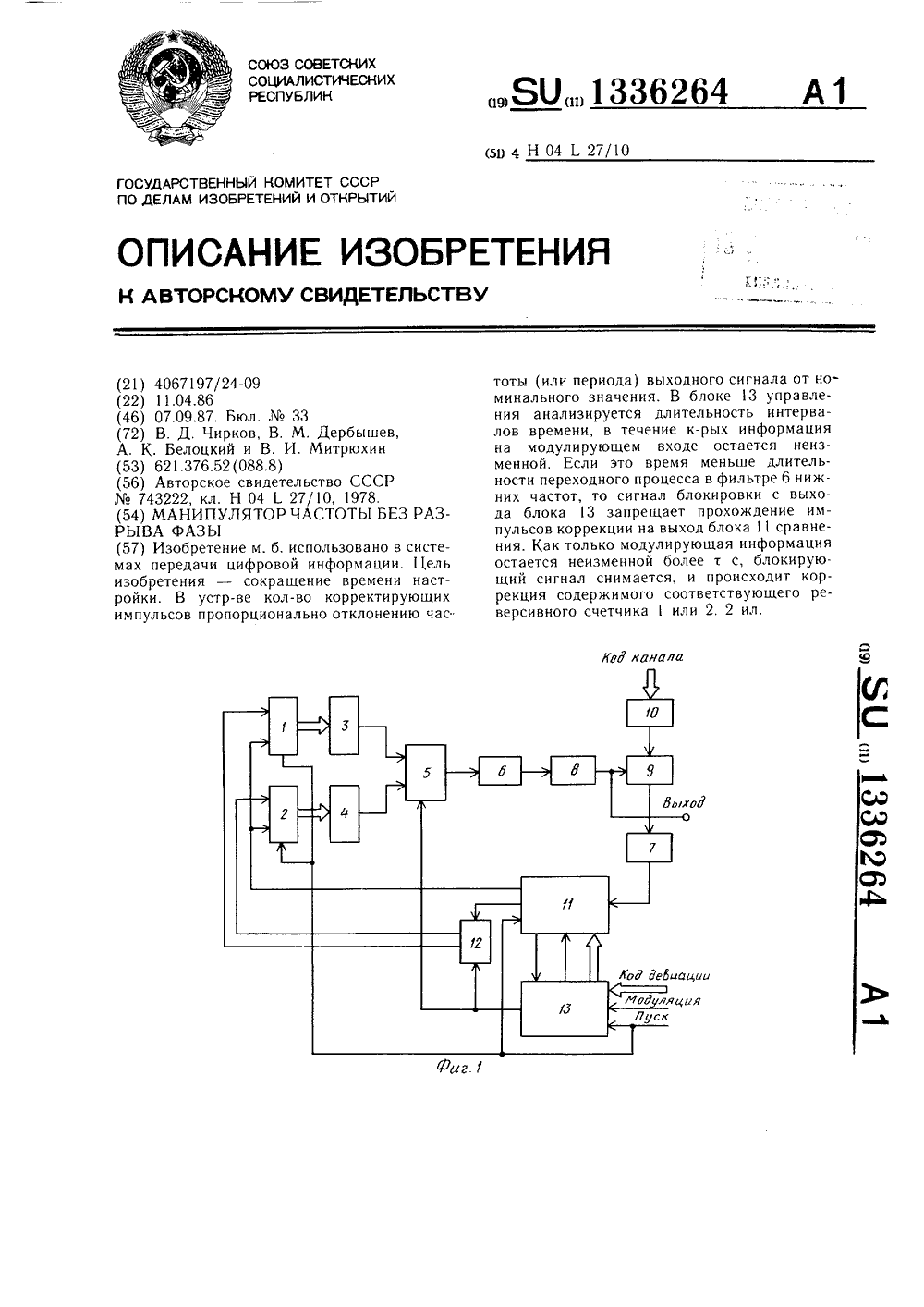
Манипулятор частоты без разрыва фазы
Номер патента: 1336264
Опубликовано: 07.09.1987
Авторы: Белоцкий, Дербышев, Митрюхин, Чирков
МПК: H04L 27/10
Метки: манипулятор, разрыва, фазы, частоты
...1 и 2. Для этого в блоке 13 управления анализируется длительность интервалов времени, в течение которых информация на модулирующем входе остается неизменной. Если это время меньше длительности переходного процесса в фильтре 6 нижних частот, то сигнал блокировки с выхода блока 13 управления запрещает прохождение импульсов коррекции на выход блока 11 сравнения. Как только модулирующая информация остается неизменной более т секунд, блокирующий сигнал снимается и происходит коррекция содержимого соответствующего счетчика.Сокращение времени настройки манипулируемых частот по сравнению с известным манипулятором объясняется следующим образом.В известном манипуляторе на каждом шаге коррекции код соответствующего реверсивного счетчика...
Манипулятор

Номер патента: 1337248
Опубликовано: 15.09.1987
Автор: Щепетов
МПК: B25J 11/00
Метки: манипулятор
...устройство 6 и орган управления, например, рукоятку 7 управления. В поворотном корпусе 2 размещен дополнительно привод вертикального перемещения, выполненный в виде силового цилиндра 8, на штоке которого имеется соединительный элемент 9. С соединительным элементом 9 силового цилиндра 8 связан накопитель 10, имеющий опорные поверхности 11 для заготовок (деталей), расположенные в зоне обслуживания исполнительного органа 4 манипулятора. Кроме того, на соединительным элементе 9 силового цилиндра 8 может быть закреплено дополнительное грузозахватное устройство, например крюковая подвеска 12.Манипулятор работает следующим образом. Оператор на буферной площадке линии, манипулируя грузозахватным устройством 6, рукояткой 7 управления и стрелой...
Манипулятор

Номер патента: 1337249
Опубликовано: 15.09.1987
МПК: B21D 9/12, B25J 11/00
Метки: манипулятор
...прорезь 23.Прорези 22 и 23 предназначены для размещения сбрасывателя (не показан).Обрабатываемая деталь 24 Фиксируется между поверхностями 25 и 26 внутренней части 14 и нижней дополнительной плиты 12 соответственно.Манипулятор работает следующим образом.В исходном положении шток 8 гидро- цилиндра 7 находится в нижнем положе-. нии. Происходит подъем штока 8 до контакта внешней части 13 с регулируемым упором 6, который регулируется таким образом, чтобы вмомент контактас ним внешней части 13 поверхность 25 внутренней части 14 находилась на уровне верхней поверхности детали 24, Затем деталь 24 подается в пространство между несомкнутыми внутренней частью 14 и нижней дополнительной плитой 12. Деталь 24 подают таким образом, чтобы она...
Манипулятор

Номер патента: 1337254
Опубликовано: 15.09.1987
МПК: B25J 18/00
Метки: манипулятор
...пластины 5 при нагреве 40 в сторону, противоположную звеньям 2, во избежание упора в эти звенья, На биметаллической пластине 5 закреплены нагревательные элементы 9, например электрические спирали с тепло вой изоляцией. Середины биметаллических пластин 5 каждой соседней пары звеньев 2 соединены между собой дополнительно жестким кольцом 10, установленным концентрично шарниру 3 бО сочленения смежных звеньев 2, Биметаллические пластины 5 расположены по образующей цилиндрической поверхности, описанной вокруг каждого звена 2 (фиг. 2 и 4), в паре смежных звеньев.Манипулятор работает следующим образом.В нерабочем положении звенья 2 манипулятора располагаются вдоль продольной оси, а биметаллические пластины 5 - прямолинейны (фиг. 2). При...
Манипулятор к прессу

Номер патента: 1339011
Опубликовано: 23.09.1987
Авторы: Викулин, Галустьян, Зотов, Климентовский, Тюнев, Яковенко
МПК: B25J 9/00
Метки: манипулятор, прессу
...12вертикального цилиндра опущен, конус упора 14 находится в пазу плиты 25,По сигналу устройства 26 управления об окончании процесса вулкани 3 133901эации и раскрытии очередного прессаманипулятор осуществляет его перезарядку, Гри этом поршень 12 со штоком1 механизма подъема перемещается вверхнее крайнее положение цилиндра10, в результате чего поднимаетсякаретка 15 по роликам 9 рамы 8 иупор 14 выходит из паза плиты 25.Посредством электродвигателя тележки 6 манипулятор начинает движениек соответствующему прессу.После остановки манипулятора возле пресса поршень 12 со штоком 11механизма подъема вместе с кареткой15 перемещается вниз. Перемещениезаканчивается, когда упор 14 входитв паз плиты 25, высота которой обеспечивает установку...
Манипулятор

Номер патента: 1341015
Опубликовано: 30.09.1987
МПК: B25J 3/00
Метки: манипулятор
...10 и 11 гидрораспределителей 12 и 13, которые, в свою очередь, магистралями связаны с насосами 14. Узел управления состоит иэ шарнирно- рычажного параллелограмма со звеньями 15-18, в котором звено 15 является ведущим, при этом звено 17 через тягу 19, двуплечие рычаги 20 и 21 и тяги 22 и 23 шарнирно связано с золотником 11, а звено 18 через тягу 24, двуплечий рычаг 25 и тягу 26 шарнирно связано с золотником 10.Ианипулятор работает следующим образом.Для поворота плеча 5 оператор за ведущее звено 15 узла 3 управления перемещает параллелограмм 15-18 в положение, показанное на фиг.2 пунктиром. При этом перемещается золотник 10 относительно корпуса гидро- распределителя 12 и рабочая жидкость от насоса 14 начинает поступать в...
Манипулятор

Номер патента: 1341017
Опубликовано: 30.09.1987
Авторы: Джолдасбеков, Джумадулаев, Есиков, Слуцкий
МПК: B25J 11/00
Метки: манипулятор
...точности позиционирования путемповышения жесткости конструкции.На фиг,1 изображен манипуляторв диметрической проекции; на фиг.2 -кинематическая схема переключающегоустройства; .на фиг.3 - кинематическая схема переключающего устройства,вид сверху, на фиг.4 - кинематическая схема манипулятора в крайнемположении ползуна.Манипулятор содержит основание 1на поворотной колонне 2. К основанию шарнирно прикреплено первое звено 3 основного механизма с тормозом4. К звену 3 прикреплено второезвено 5, между звеньями 3 и 5 размещен приводной двигатель 6, Звено 25 шарнирно связано со схватом 7, имеющим приводы 8 и 9 ориентации, и свторым звеном 10 дополнительногодвухзвенного механизма. Первое звено11 этого механизма шарнирно присоединено к...
Манипулятор

Номер патента: 1341019
Опубликовано: 30.09.1987
Автор: Литвиненко
МПК: B25J 11/00
Метки: манипулятор
...4, приводов поступательного перемещения в радиальном и аксимальном направлениях. Приводы расположены по четыре 25 в одной плоскости, перпендикулярной, оси вала 1, при этом приводы,. лежащие в одной плоскости, например 5, 7 и 6,8, лежат на одной оси и сдвинуо ты друг относительно друга на 90 . ЗО Приводы снабжены штоками 9, связанными через шарниры 10 с валом 1 и корпусом 11. Шарниры 10 установлены с помощью подшипников 12 на коленах 13 вала 1, Позициями 14, 15 и 16 условно обозначены подшипники, связанные с остальными приводами групп.Манипулятор работает следующим образом.При одновременном действии приво О дов, лежащих на одной оси, происходит продольное и радиальное перемещение исполнительного органа манипулятора.При поочередном...