Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1558663
Автор: Крисятецкий



Текст
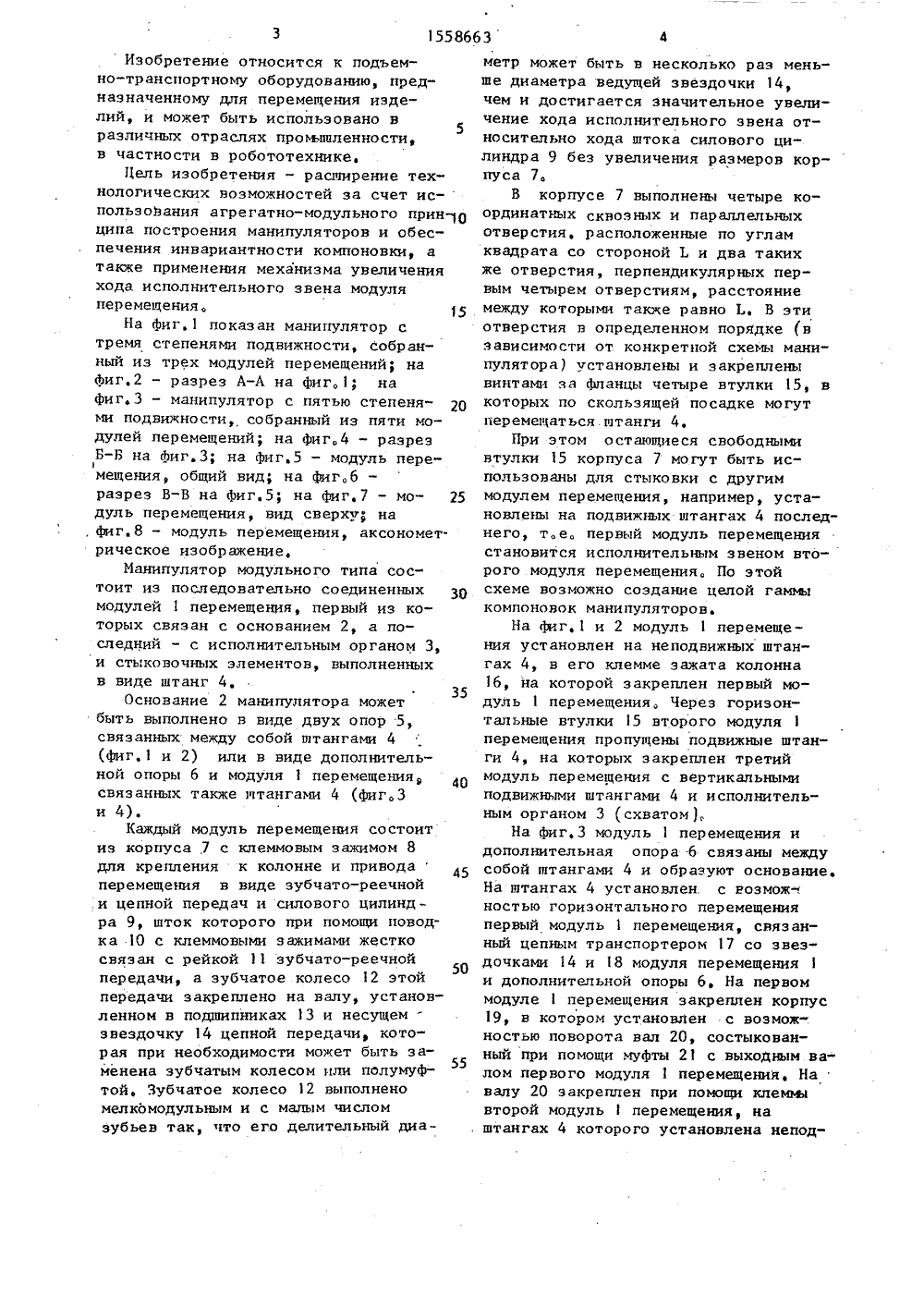
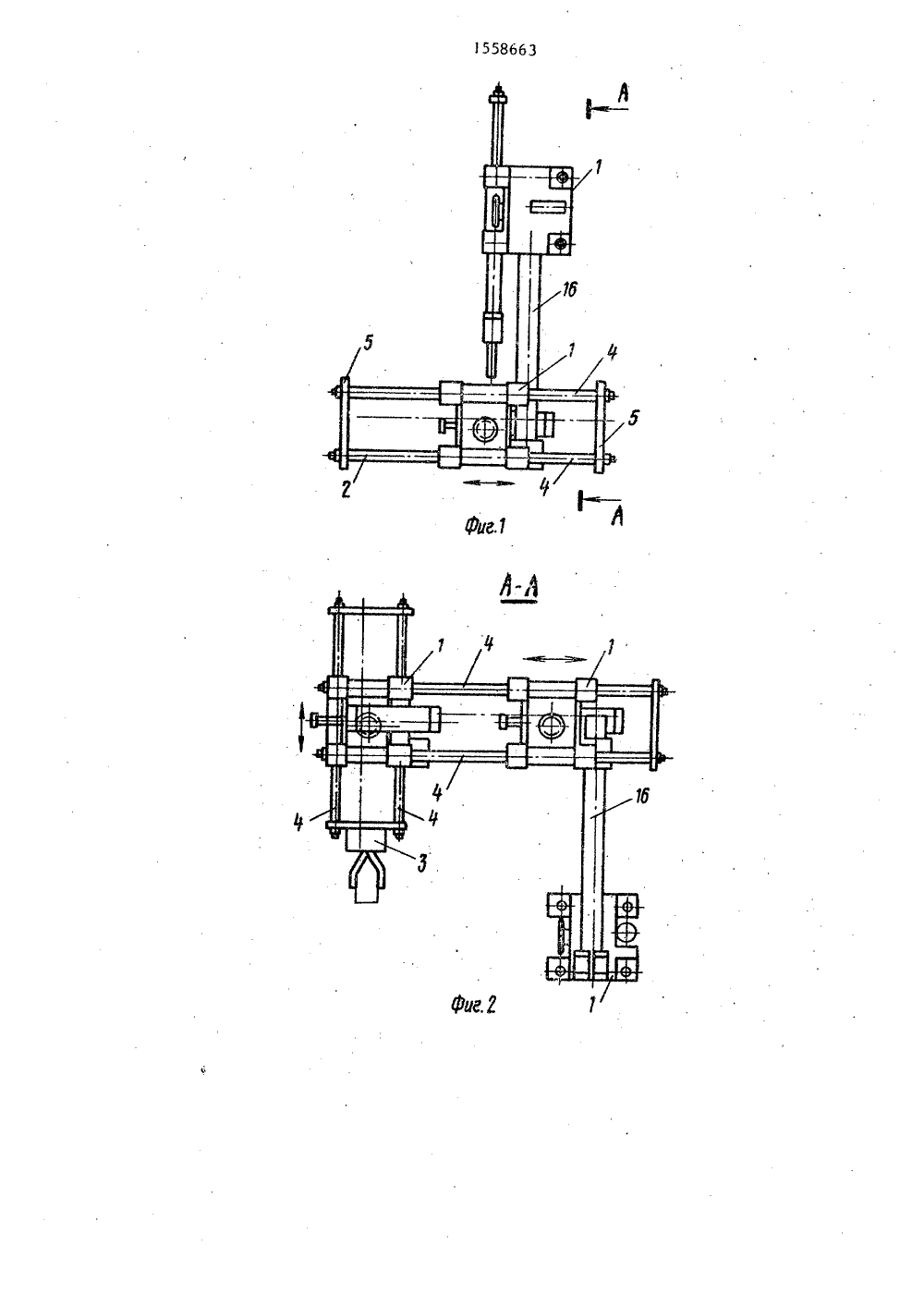
/08 ц)5 В НИЕ ИЗОБРЕТЕНИ ения и обеспечения инвариантностикомпоновок. Это достигается тем, чтов зависимости от технологической задачи может быть собрана конструкцияманипулятора из унифицированных деталей, из которых состоит модуль перемещения 1, Каждый из модулей переме-щения 1 состоит из привода перемещения в виде силового цилиндра,шток которого связан с рейкой зубчатой передачи и корпуса 7, во взаимноперпендикулярных плоскостях которого.ыполнены отверстия. Для связи модулей перемещений 1 между собой служатстыковочные элементы в виде штанг 4,расположенных в отверстиях корпусовсмежных модулей, при этом корпусамогут быть установлены на штангахкак жестко связанными с ними, так и своэможностью перемещений, 8 ил,ОСУДАРСТБЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯи гкнт ссс(71) Специальное проектно-конструкторское и технологическое бюро Производственного объединения "Псковэлектромаш"(56) Авторское свидетельство СССРВ 763082, кл. В 25 3 9/08, 980.(54) МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА(57) Изобретение относится к подъемно-транспортному оборудованию, предназначенному для перемещения различных изделий, и может быть использовано в робототехнике, Целью изобретенияявляется расширение технологическихвозможностей за счет использоваияагрегатно-модульного принципа постро 8663 А 1Изобретение относится к подъемно-транспортному оборудованию, предназначенному для перемещения изделий, и может быть использовано вразличных отраслях проиппленности,в частности в робототехнике.Цель изобретения - расширение технологических возможностей за счет ис-пользования агрегатно-модульного прин ципа построения манипуляторов и обеспечения инвариантности компоновки, атакже применения механизма увеличенияхода исполнительного звена модуляперемещения. 5На Фиг,1 показан манипулятор стремя степенями подвижности, собранный из трех модулей перемещений; наФиг.2 - разрез А-А на фиг,1; нафиг,З - манипулятор с пятью степенями подвижности, собранный из пяти модулей перемещений; на фиг,4 - разрезБ-Б на Фиг.З; на Фиг,5 - модуль перемещения, общий вид; на Фиг.б -разрез В-В на Фиг.5; на Фиг,7 - модуль перемещения, вид сверху на, фиг. 8 - модуль перемещения, аксономет.рическое изображение,Манипулятор модульного типа состоит из последовательно соединенныхмодулей 1 перемещения, первый из которых связан с основанием 2, а последний - с исполнительным органом 3,и стыковочных элементов, выполненныхв виде штанг 4,Основание 2 манипулятора можетбыть выполнено в виде двух опор 5,связанных между собой штангами 4(фиг, и 2) или в виде дополнительной опоры 6 и модуля 1 перемещения, 40связанных также штангами 4 (Фиг,Зи 4).Каждый модуль перемещения состоитиз корпуса 7 с клеммовым зажимом 8для крепления к колонне и привода 45перемещения в виде зубчато-реечнойи цепной передач и силового цилиндра 9, шток которого при помощи поводка 10 с клеммовыми зажимами жесткосвязан с рейкой 11 зубчато-реечнойпередачи, а зубчатое колесо 12 этойпередачи закреплено на валу, установленном в подшипниках 13 и несущемзвездочку 14 цепной передачи, которая при необходимости может быть за 55менена зубчатым колесом или полумуфтой, Зубчатое колесо 12 выполненомелкомодульным и с малым числомзубьев так, что его делительный диаметр может быть в несколько раз меньше диаметра ведущей звездочки 14,чем и достигается значительное увеличение хода исполнительного звена относительно хода штока силового цилиндра 9 без увеличения размеров корпуса 7,В корпусе 7 выполнены четыре координатных сквозных и параллельныхотв ер стия, р ас положенные по угл амквадрата со стороной Ь и два такихже отверстия, перпендикулярных первым четырем отверстиям, расстояниемежду которыми также равно Ь. В этиотверстия в определенном порядке взависимости от конкретной схемы манипулятора) установлены и закрепленывинтами за Фланцы четыре втулки 15, вкоторых по скользящей посадке могутперемещаться штанги 4.При этом остающиеся свободнымивтулки 15 корпуса 7 могут быть использованы для стыковки с другиммодулем перемещения, например, установлены на подвижных штангах 4 последнего, т.е, первый модуль перемещениястановится исполнительным звеном второго модуля перемещения, По этойсхеме возможно создание целой гаммакомпоновок манипуляторов,На Фиг,1 и 2 модуль 1 перемещения установлен на неподвижных штангах 4, в его клемме зажата колонна16, на которой закреплен первый модуль 1 перемещения, Через горизонтальные втулки 15 второго модуля 1перемещения пропущены подвижные штанги 4, на которых закреплен третиймодуль перемещения с вертикальнымиподвижными штангами 4 и исполнительным органом 3 (схватом ),На фиг,З модуль 1 перемещения идополнительная опора 6 связаны междусобой штангами 4 и образуют основание.На штангах 4 установлен. с возмож-;ностью горизонтального перемещенияпервый модуль 1 перемещения, связанный цепным транспортером 17 со звездочками 14 и 18 модуля перемещения 1и дополнительной опоры б, На первоммодуле 1 перемещения закреплен корпус19, в котором установлен с возмож-.ностью поворота вал 20, состыкованный при помощи муфты 21 с выходным валом первого модуля 1 перемещений, Навалу 20 закреплен при помощи клеюввторой модульперемещения, наштангах 4 которого установлена непод8663 6 25 ЭО силовых элементов,Манипуляторы, составленные изнескольких модулей 1 перемещений, работают следующим образом,Иа фиг,1 и 2 первый модуль 1, приводимый собственным силовым цилиндром, перемещается на втулках 15 понеподвижным штангам 4 основания,транспортируя закрепленный на колонне 16 второй модуль 1, который своимсиловым цилиндром 9 перемещает горизонтально,штанги 4 с закрепленнымна иих третьим модулем 1, который всвою очередь перемещает вертикальноштанги 4 со схватом 3.Ка фиг.З и 4 показаны возможныеварианты использования приводных модулей для поворота 1,ротации ) исполнительных звеньев, а также использование модуля в качестве привода цепного транспортера, Так, цепной транспортер 17, связывающий звездочки иоду 35.риантности компоновок в корпусе каж 1доро моцуля перемещения во взаимноперпендикулярных плоскостях выполнены отверстия, а стыковочные элементы 40 50 5 155 вижно дополнительная опора 6, а также третий модуль 1 перемещения, имекиций возможность горизонтально перемещаться. Цепной транспортер 17 осуществляет связь третьего модуля 1 перемещения со звездочками второго модуля 1 и дополнительной опоры 6, Через вертикальные втулки третьего модуля 1 пропущены штанги 4на кон-, це которых закреплен четвертый модуль 1, На выходном валу четвертого модуля 1 установлен схват 3.Манипулятор модульного типа работает следующим образом.Рассмотрим работу одного из модулей 1 .перемещений.При перемещении штока силового цилиндра 9 с помощью поводка 10 перемещается рейка 11, которая поворачивает вап с зубчатым колесом 12 и. с установленной на нем ведущей звездочкой 14Ведущая звездочка 14 протягивает цепь, идущую к исполнительномузвену, перемещая его по штангам 4, которые могут устанавливаться во втулках 15 как параллельно оси силового цилиндра 9, так и перпендикулярно ей, чем и достигается инвариантность компоновки исполнительных и 5 10 15 20 ля 1 и дополнительной опоры 6 (установленной на штангах 4 модуля 1 ),перемещает первый модуль 1 на горизонтальных втулках по штангаи 4 основания, Привод первого модуля 1 используется для поворота вертикального вала 20, установленного.в подшипниках в корпусе 19, с закрепленным на нем вторым модулем . Второймодуль 1, звездочка которого связанасо звездочкой дополнительной опоры6 цепным транспортером 17, перемещает с помощью последнего горизонтальнопо штангам 4 третий модуль 1, который в свою очередь перемещает вертикапьно закрепленный на штангах 4 четвертый модуль 1, Этот последний мо"дуль 1 используется как привод ротации закрепленного на его выходномвапу ( вместо звездочки ) схвата 3,Формула изобретения Манипулятор модульного типа, содержащий по следовательно соединенные модули перемещений, первый иэ которых связан с основанием, а последний - с захватом, причем каждый из модулей включается в себя корпус и привод перемещения, и стыковочные элементы, о т л и ч а ю щ и й с я тем, что, с целью расширения технологических возможностей за счет обеспечения инвавыполнены в виде штанг, установленных в отверстиях корпусов смежных модулей посредством введенных втулок,причем корпус одного из смежныхмодулей перемещений жестко связанштангами, а корпус другого модуля перемещений установлен с возможностьюперемещения вдоль этих штанг, при этомпривод перемещения каждого модуля выполнен в виде зубчато-реечной передачи и силового цилиндра, корпус которо.го смонтирован на корпусе модуля, а шток жестко связан с рейкой зубчатореечной передачи.
СмотретьЗаявка
4431665, 15.04.1988
СПЕЦИАЛЬНОЕ ПРОЕКТНО-КОНСТРУКТОРСКОЕ И ТЕХНОЛОГИЧЕСКОЕ БЮРО ПРОИЗВОДСТВЕННОГО ОБЪЕДИНЕНИЯ "ПСКОВЭЛЕКТРОМАШ"
КРИСЯТЕЦКИЙ АРНОЛЬД ЭМИЛЬЕВИЧ
МПК / Метки
МПК: B25J 9/08
Метки: манипулятор, модульного, типа
Опубликовано: 23.04.1990
Код ссылки
<a href="https://patents.su/6-1558663-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Модуль линейного перемещения промыш-ленного робота

Номер патента: 848351
Опубликовано: 23.07.1981
Авторы: Калинников, Табачник, Царьков
МПК: B25J 11/00
Метки: линейного, модуль, перемещения, промыш-ленного, робота
...планетарная гайка 4 качения.с резьбовыми роликами, корпус 5 которой установлен в направляющих б и соединен с перемещаемым исполнительным органом или промежуточным звеном 7.Колесо гайки 4 (фиг,2) охватывает. набор расположенных вокруг винта 2 резьбовых роликов-сателлитов 8, закрепленных в сепараторе 9, перекатывающихся по винту и колесу гайки 4. Колесо гайки 4 установлено в подшипниках 10 (фиг.3), закрепленных вкорпусе 5, в котором закрепленадвухсторонняя электромагнитная тормоз.ная муфта И, взаимодействующая ссепаратором и колесом гайки. Призаторможенном сепараторе колесорасторможено н наоборот,На другом конце ходового винтаможет устанавливаться датчик 12 перемещения (при использовании шаговогопривода его установка необязательна),Модуль...
Модуль линейного перемещения промышленного робота

Номер патента: 1215995
Опубликовано: 07.03.1986
Авторы: Натбиладзе, Сабиашвили, Тибилашвили
Метки: линейного, модуль, перемещения, промышленного, робота
...штоком 2. Направляющий элемент 3 выполнен в виде линейки для задания положения упоров 4 и 5, установленных на направляющем элементе с возможностью перемещения вдоль него и фиксации их положения. Тормозные золотники 6 и 7 установлены,на передней крышке 8 пневмоцилиндра 1, На каждом штоке 6 и 7 закреплены ходовые винты 9 и 10, взаимодействующие с гайками 11 и 12, расположенными в осевых отверстиях двух пар храповых колес 13 и 14. Колеса в каждой паре жестко связаны между собой и расположены таким образом, что зубья имеют противоположное направление. На торцовой поверхности храпового колеса каждой пары со стороны упора закреплены опорные элементы 15 и 16. Для передачи вращения храповым колесам предназначены толкатели 17 и 18,...
Модуль вертикального перемещения

Номер патента: 1229032
Опубликовано: 07.05.1986
Авторы: Белов, Кошель, Юрченко
МПК: B25J 9/08
Метки: вертикального, модуль, перемещения
...на храпаном колесе 6 узла регулировки нейтрального положения, установленном на баканой стенке корпуса,1 и Фиксируемом от проворота собачкой 7. Ось собачки 7 укреплена на каретке 8, которая может перемещаться по ходовому винту 9 на расстояние, соответствующее одному шагу храпоного колеса 6. Для сообщения дополнительной энергии подвижному звену служит ренер. синный двигатель 10 с насадкой 11. В крайних наложениях подвижное звено 3 удерживается фиксаторами 12 и 13, На подвижном звене 3 модуля нертикальнага. перемещения закреплен модуль 14 гаризантальнага перемещения.Модуль нертикальнсго перемещения работает следующим образом.Подвижное звена 3, удерживаемое упругим элементам н виде пружины 4 кручения в нейтральном положении, переводится в...
Модуль вертикального перемещения

Номер патента: 1386444
Опубликовано: 07.04.1988
Авторы: Белов, Косарев, Юрченков
МПК: B25J 9/08
Метки: вертикального, модуль, перемещения
...колесе 8, свободно установленном на валу храпового колеса 6 с возможностьюфиксации и поворота с помощью самотормозящего черняка 9 на угол, соот 35ветствующий перемещению конца собачки7 в пределах шага храпового колеса6, Для сообщения дополнительной энергии подвижному звену служит реверсивный двигатель 1 О с насадкой. 11. Вкрайних положениях подвижное звено 3удерживается Фиксаторами 12 и 13. Нагодвижном звене 3 модуля вертикального перемещения закреплен модуль 14горизонтального перемещения.Модуль вертикального перемещенияработает следующим образом.Подвижное кольцо 3, удерживаемоеупругим элементом 4 в нейтральномположении, переводится в одно изкрайних положений, например в нижнее(фиг,1), и захватывается фиксатором12. Пружина аккумулирует...
Многопозиционный пневматический модуль линейных перемещений

Номер патента: 1474344
Опубликовано: 23.04.1989
Авторы: Васюков, Елтышева, Завацкий, Кубраченко, Ландо
МПК: F15B 11/12
Метки: линейных, многопозиционный, модуль, перемещений, пневматический
...Конец ленты 7 через наклонный паз 9 в крышках 2 и 3 пропускается в сквозной паз 15 натяжных катушек 8, каждая из которых затем поворачивается вокруг своей оси, наматывая на себя ленту 7. Далее нажимным винтом 11 сухарь 10 поджимается к катушке 8, Аиксируя ее, а следовательно, и намотанную на нее ленту 7.Работает многопозиционный пневматический модуль следующим образом.Перемещение поршня 5 происходит при подаче рабочей среды в одну из полостей 35 или 36. Для перемещения поршня 5 вправо (фиг.5) включаются пневмораспределители 22 и 26, При этом Аиксатор 16 выходит из соответствующего гнезда 17 копирной линейки 18. По мере заполнения полости 35 поршень 5 начинает ускоренно переме щаться к точке позиционирования. Совмещение осей...
Предыдущий патент: Модуль линейного перемещения промышленного робота
Следующий патент: Многопозиционный модуль перемещения промышленного робота
Случайный патент: Автоматический переключатель резерва