Манипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1333567
Авторы: Андреев, Мачабели, Снеховский, Фарберова, Френкель





Текст
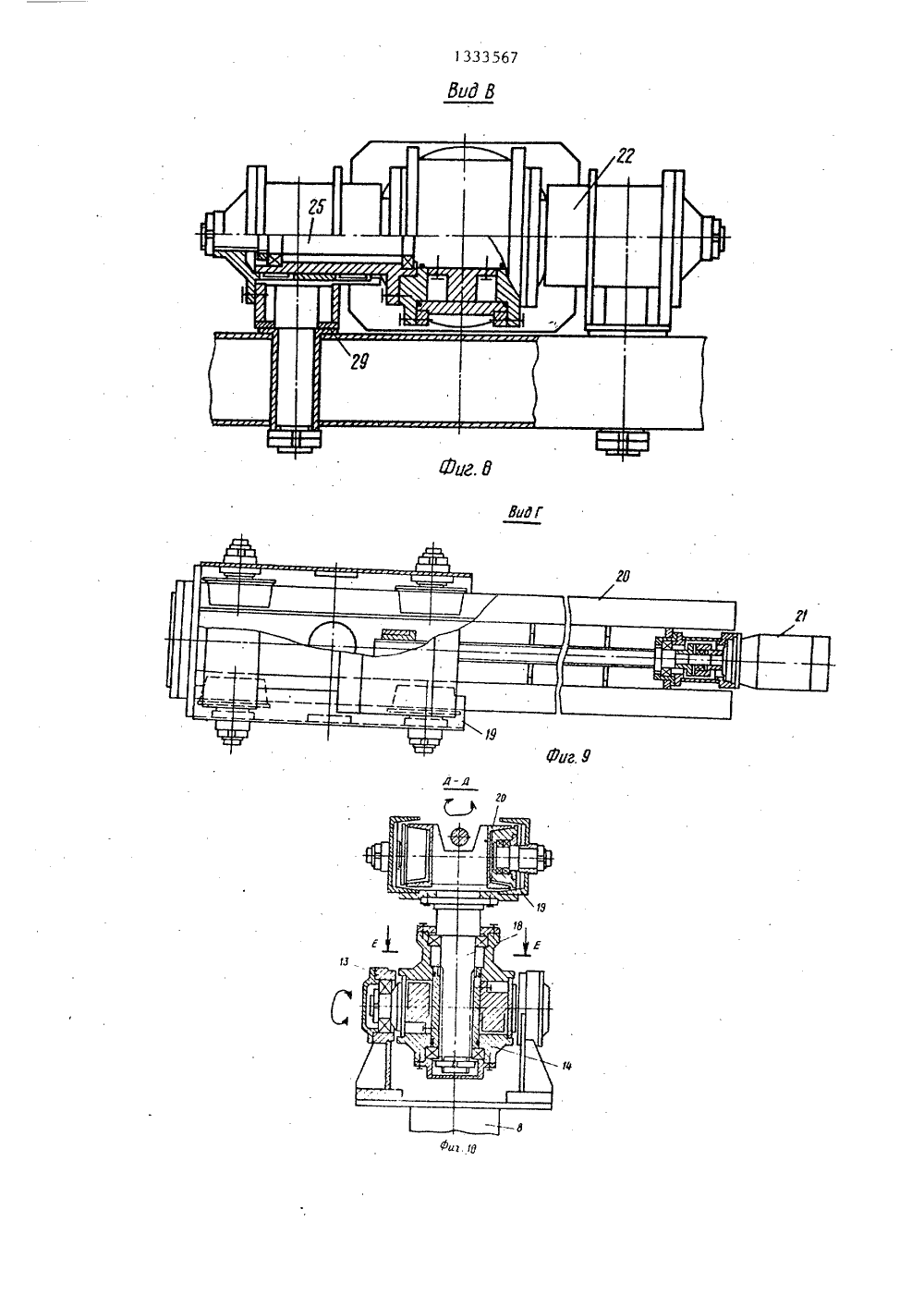
(5 5 ОПИСАНИЕ ИЗОБРЕТЕНИИ АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ИПУЛЯТ(54) (57) строля 038/2 21) 3832 722) 28.12.8446) 30.08.87.71) Центральноонструкторскоееханизации и а л.эксбюр риментальное комплексной изации в строий научно-ис томат ральн тельстве и Цен следовательский ментальный инст ктно-эксперитут организации,меической помощи ханиэации и.,техстроительству. Френкель 88.8)видетельство СССР25 д 5/00, 1979,и.приГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ Изобретение относится к роботоению и может быть использовано д выполнения монтажных, погрузочно- разгрузочных работ, для обслуживания металлорежущего,кузнечно-прессового, литейного, складского оборудования, конвейеров и автоматических линий, для окраски и нанесения покрытий и для выполнения различных тех нологических, в том числе и строительных, транспортных операций. Целью изобретения является повышение производительности за счет уменьшения рабочей зоны пространственного переч мещения крупногабаритных издели Для этого манипулятор содержит1333567 Изобретение относится к роботостроению и может быть использованодля выполнения монтажных, погрузочноразгрузочных работ, для обслуживанияметаллорежущего,кузнечно-прессового,литейного, складского оборудования,конвейеров и автоматических линий,для окраски и нанесения покрытий идйя выполнения различных технологических,в том числе и строительных,транспортных операций,Цель изобретения - повышение производительности за счет уменьшениярабочей зоны пространственного перемещения крупногабаритных изделий.На фиг. 1 изображен манипулятор,общий вид; на фиг, 2 - то же, положение при монтаже стен;на фиг, 3то же,при монтаже потолка плитами;на фиг. 4 - то же,при монтаже полаплитами; на фиг. 5 - вид А на фиг. 1;на фиг. 6 - разрез Б-Б на фиг, 5;на фиг. 7 - узел 1 на фиг. 1; нафиг. 8 - вид В на фиг. 7;на фиг. 9 -вид Г на фиг. 1;на фиг. 10 - разрезД-Д на фиг, 1;на фиг. 11 - разрезЕ-Е на фиг. 10.Манипулятор содержит самоходноешасси 1 с аутригерами 2 и дополнительными направляющими З,в которыхразмещена приводная тележка 4 с установленной на ней поворотной платформой 5. Плечо 6 одним концом шарнирно закреплено в опоре 7 платфор".мы 5, а другим шарнирно соединенос предплечьем 8. Основные силовые водную тележку 4 с приводной платформой 5, установленной в дополнительных направляющих 3 самоходногошасси 1. На цапфах 13 предплечья 8установлен корпус 14 дополнительногосилового цилиндра 15 вращательногоперемещения, который шарнирно соединен с двумя силовыми цилиндрами 17ее качания, расположенными шарнирнона предплечье 8. Основная направляющая 19, соединенная с валом 18дополнительного силового цилиндра15, имеет размещенную в ней механическую руку 20 с установленным в 510 15 20 25 30 35 ней дополнительным силовым цилиндром 21 поступательного перемещения,Кисть механической руки 20 содержит два силовых цилиндра 23 и 24вращательного перемещения, выходныеэлементы которьгх расположены в двухвзаимно-перпендикулярных плоскостяхс соединением корпуса 28 силовогоцилиндра 23 с выходным элементом силового цилиндра 24, а выходной элемент силового цилиндра 23 соединенс траверсой 30 захватного органа 29.1 э,п, ф ль 1 11 ил цилиндры 9 привода перемещения плеча б,шарнирно установленные в кронштейнах 10 платформы 5,штоками 11соединены с плечом б. Основной цилиндр 12 привода перемещения предплечья 8 шарнирно соединен с плечомб и предплечьем 8.На цапфах 13 предплечья 8 установлен корпус 14 дополнительного силового цилиндра 15 вращательного перемещения, шарнирно соединенный со штоками 16 дополнительных силовых цилиндров 17 его качения.Вал 18 дополнительного силовогоцилиндра 15 вращательного перемещения соединен с основной направляющей19, в которой установлена механическая рука 20 с дополнительным силовымцилиндром 2 1 поступательного перемещения.Кисть 22 механической руки 20содержит два силовых . цилиндра 23 и24 вращательного перемещения, выходные элементы 25 и 26 которых расположены во взаимно перпендикулярныхплоскостях, Корпус 27 одного силового цилиндра 24. соединен с рукой 20,а выходной элемент 26 соединен с корпусом 28 другого цилиндра 23,Захватный орган 29, соединенныйс выходным элементом 25 силовогоцилиндра 23, выполнен в виде траверсы 30, на балке которой установленырегулируемые по высоте самоустанавливающиеся вакуумные захваты 3 1 изажимные днуплечие рычаги 32,связан 133356750 ные шарнирно со штоками 33 силовыхцилиндров 34. Для фиксации устанавливаемого,изделия 35 с плоской поверхностью 36 у пола и потолка выполне 5ны соответствующие опорные элементы37 и 38.Манипулятор работает следующимобразом.Производится технологическая операция - монтаж стеновых перегородок,представляющих собой иэделие 35прямоугольной формы с отношениемширины к длине 1;10, расположенныхв стопе,По заданной программе (при наличии системы программного управления)или от ручного управления за счетлинейного перемещения приводной тележки 4 по направляющим,3 шасси 1, 20поворота платформы 5, плеча б,предплечья 8, основной направляющей 19,линейного перемещения в ней руки 20и поворотных движений двух силовыхцилиндров 23 и 24 захватный орган 2529 переводится в исходное положениенад стопой изделий 35.После этого траверса 30 захват- .ного органа 29 устанавливается вакуумными захватами 3 1 на плоскую поверхность 36 иэделия 35 и производится его зажим, Силовые цилиндры34, воздействуя штоками 33 на двуплечие рычаги. 32, которые выполняютроль подстраховывающих элементов,зажимают изделие 35 по торцам.Затем изделие 35 поднимается отстопы вверх перемещением плеча 6 ипредплечья 8.При этом силовой ци -линдр 23 производит поворот захватного органа 29 с изделием 35 наа180 . Одновременно происходит втягивание руки 20 в основную направляющую 19 и поворот основной направляющей 19 и соответственно руки 20Она 90 за счет поворотавала 18 силового цилиндра 15. Таким образом,изделие 35 поворачивается на 90и располагается длинной сторонойвдоль манипулятора,При дальнейшем движении плеча 5и предплечья 8 изделие 35 однойгранью устанавливается в опорныйэлемент пола 37 (угольник илишвеллер),а затем перемещением плеча 5 и предплечья 8 и .установочными перемещениями силовых цилиндров15 и 2.3 подается вперед до установкив вертикальное положение, упираясь в опорные элементы пола 37 и потолка 38. Потом перемещением плеча 5 и предплечья 8 изделие 35 поднимается на небольшую высоту вертикально вверх, скользя по опорным элементам пола 37 и потолка 38.При этом двуплечие рычаги 32 отводятся от изделия 35 и дальнейшие операции производятся с использованием зажима вакуумных захватов 31.Перемещениями тележки 4 или руки 20 изделие 35 пристыковывается в паз с рядом стоящим и опускается до опорного элемента пола 37, т.е. изделие 35 окончательно устанавливается в проектное ,положение.На этом заканчивается рабочий цикл монтажа одного изделия 35 и манипулятора возвращается в исходное положение. Начинается следующий рабочий цикл.формула изобретения 1, Манипулятор, смонтированный на самоходном шасси, содержащий поворотную платформу, установленную на ней последовательно и - шарнирно соединенные плечо, предплечье и кисть с захватным органом,а также приводы перемещения, выполненные в виде основных силовых цилиндров поступательного и вращательного перемещений, о т л и ч а ю щ и й с я тем,что, с целью повышения производительности за счет уменьшения рабочей зоны пространственного перемещения крупногабаритных иэделий он снабжен приводной тележкой, на которой расположена поворотная платформа основной направляющей и установленной в ней механической рукой, имеющей индивидуальные дополнительные силовой цилиндр поступательного перемещения и силовой цилиндр вращательного перемещения и два силовых цилиндра ее качения, а предплечье снабжено цапфами,в которых установлен корпус силового цилиндра вращательного перемещения механической руки, шарнирно. связанный со штоками силовых цилиндров качения механической руки, причем корпусы последних шарнирно установлены на предплечье,при этом кисть снабжена двумя силовыми цилиндарми вращательного перемещения, выходные элементы которых расположены во взаимно-перпендикулярных плоскостях,а на самоходном шасси5 133 выполнены дополнительные направляющие, в которых установлена приводная тележка.2, Манипулятор по п. 1, о т л ич а ю щ и й с я тем,что,с целью обеспечения надежности захвата изделия в различных положениях его в пространстве, захватный орган вы 3567полнен в виде траверсы,на которойустановлены регулируемые по высотесамоустанавливающиеся вакуумные 5захваты, силовой цилиндр поступательного перемещения и двуплечие рычаги,причем одно плечо каждого из нихшарнирно связано со штоком силовогоцилиндра.1333567 2,11 Составитель И,Бакуледактор Е.Копча Техред В.Кадар Чер Коррект писное оизводственно-полиграфическое предприятие, г. Ужгород, ул, Проектна каз 3912/16 Тираж ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж,Ра51 П комитета СССР открытий шская наб д
СмотретьЗаявка
3832038, 28.12.1984
ЦЕНТРАЛЬНОЕ ЭКСПЕРИМЕНТАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО КОМПЛЕКСНОЙ МЕХАНИЗАЦИИ И АВТОМАТИЗАЦИИ В СТРОИТЕЛЬСТВЕ, ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО ЭКСПЕРИМЕНТАЛЬНЫЙ ИНСТИТУТ ОРГАНИЗАЦИИ, МЕХАНИЗАЦИИ И ТЕХНИЧЕСКОЙ ПОМОЩИ СТРОИТЕЛЬСТВУ
СНЕХОВСКИЙ ВЛАДИМИР АНДРИАНОВИЧ, АНДРЕЕВ АЛЕКСАНДР ФЕДОРОВИЧ, МАЧАБЕЛИ ШОТА ЛЕВАНОВИЧ, ФРЕНКЕЛЬ ГРИГОРИЙ ЮРЬЕВИЧ, ФАРБЕРОВА АЛЬБИНА ВАСИЛЬЕВНА
МПК / Метки
МПК: B25J 5/00
Метки: манипулятор
Опубликовано: 30.08.1987
Код ссылки
<a href="https://patents.su/8-1333567-manipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор</a>
Устройство для перемещения цилиндров, накатных и увлажняющих валиков в печатной секции листовой офсетной машины

Номер патента: 512937
Опубликовано: 05.05.1976
МПК: B41F 13/34
Метки: валиков, листовой, накатных, офсетной, перемещения, печатной, секции, увлажняющих, цилиндров
...штока 9, расположенных на направляющей 10 по ходу движения штока, причем верхний упор 11 выполнен регулируемым Для совместного перемещения офсетного и формного цилиндров рычаги 6 соединены со штоками гидроцилиндров 13, также размещенных на боковых стенках машины. Для ограничения перемещения рычагов 6 имеются регулируемые упоры 14 и 15. На укрепленных подвижно в обеих боковых стенках машины эксцентриковых втулках 5 формного цилиндра 3 установлены без эксцентриситета по отношению к вапу формного цилиндра 3 две консоли 16, на каждой из которыхдля накатйых валиков 17 о 20 и увлажняюших валиков 21, 22 укреплены средства для индивидуального перемещения каждого валика, выполненные в виде силового цилиндра 23, на штоке которого...
Способ кадровой развертки при помощи возвратно поступательного перемещения цилиндра, несущего на своей внутренней поверхности оригинал

Номер патента: 289520
Опубликовано: 01.01.1971
Авторы: Горбанев, Иванов, Кухарев, Мельников, Оганов, Фортинска
МПК: H04N 1/04
Метки: внутренней, возвратно, кадровой, несущего, оригинал, перемещения, поверхности, помощи, поступательного, развертки, своей, цилиндра
...четвертого и последующих четных бланков производят путем перемещения этого цилиндра в обратном направлении из второго исходного положения в первое, причем в каждом из исход ных положений вырабатывают и передают по каналу связи сигнал, характеризующий номер исходного положения цилиндра, по которому синфазируют кадровую развертку передающего и приемного аппаратов.2На чертеже изображена конструктивная схема устройства, при помощи которого реализуется предложенный способ.Устройство содержит цилиндр 1, внутторого размещена оптическая головка р ПРИ ПОМОЩИ ВОЗВРАТНОНИЯ ЦИЛИНДРА, НЕСУЩЕГООВЕРХНОСТИ ОРИ ГИНАЛ щающаяся с угловой скоростью то, На внутренней поверхности цилиндра 1 расположен бланк 3. В передатчике это оригинал-оттиск газетной...
Рука окрасочного манипулятора

Номер патента: 929239
Опубликовано: 23.05.1982
МПК: B05B 15/00
Метки: манипулятора, окрасочного, рука
...2 и соединена с силовым 3 и уравновеыивающимч цилиндрами. В руке 1 соосно другдругу установлены двигатели 5 и 6,вал 7 последнего из которых соединен с кронштейном 8.На конце кронштейна Смонтированкожух 9 для пневматического краскораспылителя 10. Кожух состоит изкороба 11 с отверстиями 12 под шланги 13 и 11, соединенные штуцерами15 и 16 с краскораспылителем 10,и крышки 17, охватывающей краскораспылитель. Крышка 17 выполнена по"воротной на осях 18 относительно ко"роба 11 и подпружинена пластинчатойпружиной 19 к стенке короба, обращенной к кронштейну.Крышка своими боковыми поверхностями плотно прилегает к наружнымповерхностям боковых стенок короба,а верхней своей частью нескольковыступает по отношению к переднейстенке короба. Место...
Рука тензорного манипулятора

Номер патента: 1202851
Опубликовано: 07.01.1986
МПК: B25J 1/02
Метки: манипулятора, рука, тензорного
...13 и 14, под две свободно проходящие через них тяги 20 и 2 1 расположены симметрично относительно продольной оси звена 1. Аналогичным образом расположены оси отверстий на пластинах 9, 11 и 18, На пластине 10 втулки 5 оси отверстий 22 и 23 расположены по одну сторону от продольной оси втулки 5 и пересекают ось 17.202851 2 55 5 10 15 20 25 30 35 40 45 50 Втулка 5 соединена с соседним звеном 2 через вращательную кинематическую пару, ось вращения которойсовпадает с продольными осями звеньев 2 и втулки 5. Контактные поверхности звена 2 и втулки 5 образуютподвижное соединение. На частиконтактной поверхности звена 2,расположенной внутри втулки 5, нарезаны зубья 24 звольвентного профиля (Фиг.З).Во втулке 5 соответственно нарезанной части...
Манипулятор изделий в установках для детонационного напыления покрытий

Номер патента: 698214
Опубликовано: 15.05.1983
Авторы: Астахов, Гавриленко, Зверев, Клименко, Скадин, Хлебников
МПК: B05C 13/02
Метки: детонационного, манипулятор, напыления, покрытий, установках
...движения детонационной волны экрана, жестко закрепленного на налу, который снабжен обгонной муфтой, соединенной с редуктором. Для возврата экрана в, исходное положение после воздействия детонационной волны экран снабжен упругим элементом.На чертеже схематически показан общий нид манипулятора.Манипулятор содержит планшайбу 1, закрепленную на оси 2, вращающейся н подшипнике 3. Ось 2 связана посредством Редуктора 4 с выходным валом 5 обгонной муфть б, установленным в иодипнигах 7 и 8. Обгонная муфта б гбесиечинает передачу вращательного днжеиия от уе.тановленного в подшипикаквходного нала 10 на выходной ач 5 ири нраеии в направлении, и иаз,:ином ст 1 эзгкой. При вращении вдиого вала 10 н протиноположном и,иравнении вал 5 остается неподвиж-...
Предыдущий патент: Задающее устройство копирующего манипулятора
Следующий патент: Устройство для управления манипулятором
Случайный патент: Устройство для очистки зерновых продуктов от легкой примеси при загрузке конвейера