Патенты с меткой «манипулятора»
Модуль манипулятора

Номер патента: 1549744
Опубликовано: 15.03.1990
Авторы: Войнов, Кудрявцев, Солдаткин, Уваров, Уварова
МПК: B05D 1/02, B25J 17/00, B25J 9/08 ...
Метки: манипулятора, модуль
...кожухом, выполненным в виде сильфона, который предохраняет дифференциальный привод 645 от попадания рабочей жидкости, Подача рабочей жидкости(краска, лак, консервант, моющая жидкость) из резервуара (не показано) осуществляется под давлением по каналу 17 внутри вала 13 и по каналам 18 в распылительной головке 16. Образующийся факел 19 из рабочей жидкости наносится на обрабатываемую поверхность 20. На противоположном конце вала 13 жестко установлено зубчатое колесо 21 дополнитель 55 но введенной зубчато"реечной передачи 22. Продольная ось колеса 21 совпадает с продольной осью поперечной оси 1, а само колесо 21 выполняе роль статического уравновешивателя исполнительного органа 14.Модуль манипулятора работает следующим...
Исполнительный орган манипулятора

Номер патента: 1549749
Опубликовано: 15.03.1990
Авторы: Хоперия, Челидзе, Шаншиашвили
МПК: B25J 17/00
Метки: исполнительный, манипулятора, орган
...3,жестко связанная с этим звеном.Управление каждым модулем осуществляется тремя приводными .устройствами, например, гибкими тягами 4,которые связывают силовое устройство 45управления (не показано) с соответствующим цилиндрическим звеном 2. Наповерхности охватывающего сферического элемента последнего равномернозакреплены кронштейны 5 для крепления гибких тяг 4,Гибкая тяга 4, связанная с кронштейном 5, огибает направляющий ролик 6 (число которых кратно числу гибких тяг), закрепленный в полостицилиндрического звена, а в цилиндри 55ческой части каждого цилиндрическогозвена предусмотрены окна 7 под гибкиетяги. на по его оси размещена трубка 3,жестко связанная с этим звеном, наповерхности охватывающего сферического элемента которого...
Схват манипулятора

Номер патента: 1551544
Опубликовано: 23.03.1990
Авторы: Астахов, Комаров, Уфатов, Якобсон
МПК: B25J 15/00
Метки: манипулятора, схват
...с рейкой 13, шарнирно соединенной со штоком 14 силового цилиндра 1 и перемещающейся в направляющих корпуса 7.В корпусе 7 подвижно установлена подпружиненная тяга 15 с возможностью взаимодействия с рейкой 13 со стороны ее нерабочей поверхности.Зажимная губка 8 имеет скос на рабочей поверхности (а в пределах 30 - 45), а губка 9 выполнена с прямой рабочей поверхностью. Длина губки 8 превышает длину губки 9 на величину 0.25 - 0,33 расстояния между прямыми участками губок.Схват манипулятора работает следующим образом.При опускании схвата на уложенные вплотную друг к другу валы 16 длинная губка 8 проходит со свободной стороны вала, а прямая короткая губка 9 проходит до предела в зазор между двумя соседними валами. После этого включается...
Захват манипулятора

Номер патента: 1551545
Опубликовано: 23.03.1990
Автор: Худолеев
МПК: B25J 15/00
Метки: захват, манипулятора
...наб., д. 4/5Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 10 Изобретение относится к машиностроению, в частности к манипуляторам, и является усовершенствованием изобретения по основному авт. св. Мо 724337,Цель изобретения - расширение функциональных возможностей, повышение надежности и увеличение долговечности.На чертеже показан захват, общий видс частичными вырывами.Захват содержит ладонь 1, пальцы, собранные из звеньев 2, трос 3, связанный с приводом 4 одним концом и с последним звеном 2 каждого пальца другим концом, пружинящий элемент 5 и эластичные оболочки 6. Трос 3 проходит через отверстия в промежуточных звеньях 2 пальцев. Звенья 2 установлены на пружинящем элементе 5 с возможностью перемещения вдоль...
Схват манипулятора

Номер патента: 1553378
Опубликовано: 30.03.1990
Автор: Иванов
МПК: B25J 15/00
Метки: манипулятора, схват
...с захватнымирычагами 3. Внутри поршня 5 находится дополнительный поршень 8, подпружиненный пружинами 9 и 10. На конце 45штока 11 дополнительного поршня 8установлен стакан 12 и клин 13, выполненный в виде усеченного конуса,сопряженного с цилиндрами, основаниякоторых являются основаниями конуса.На корпусе 1 шарнирно установленыдвуплечие рычаги 14, которые черезпромежуточные звенья 15 шарнирно связаны с захватными рычагами 3. На клине 13 установлены фиксаторы 16.Схват работает следующим образом.55При захвате детали по внешнемуконтуру (исходное состояние устройства) поршень 5 и дополнительный пор" шень 8 находятся в верхней части си-лового цилиндра 2. Захватные рычаги3 разведены, Концы двуплечих рычагов14, взаимодействующие с клином...
Устройство для коррекции положения манипулятора

Номер патента: 1553386
Опубликовано: 30.03.1990
Авторы: Коноплянко, Ручка, Рябов
МПК: B25J 19/00
Метки: коррекции, манипулятора, положения
...в нем деталью 3, предназначенной для стыковки с другой деталью 4, предварительно сбазированной на рабочей позиции 5.Дополнительно на рабочей позиции 5 установлена эталонная направляющая 6, снабженная несколькими базовыми плоскостями 7 и 8. К конечному звену 1 манипулятора прикреплен кронштейн 9, на котором установлены датчики 10 углового и линейного перемещения, сопряженные с контактным элементом 11, например шаровым. Датчики 10 соответствующим образом связаны с системой управления манипулятором. Контактный элемент 11 может быть выполнен, например, в виде токопроводящего наконечника, а плоскости 7 и 8, расположенные под углом одна к другой, в этом случае оснащаются изолированными друг от друга токопроводящими пластинами 12.Устройство...
Рука манипулятора

Номер патента: 1555124
Опубликовано: 07.04.1990
Авторы: Линников, Юлбарисов, Ягудин
МПК: B25J 18/06
Метки: манипулятора, рука
...ориентационных устройствах автоматизированногоо производства.Целью изобретения является повышение надежности работы путем устранения возможности разгерметизации гибких силовых трубок при одновременном расширении технологических возможностей за счет увеличения числа степеней подвижности,На фиг. 1 представлена схема предлагаемой руки манипулятора; на фиг. 2 - сечение А-А на фиг. 1.Рука манипулятора состоит из гибкого базового элемента 1, вдоль которого параллельно его продольной оси расположены герметичные силовые трубки 2, наполненные магнитной жидкостью 3, несущие дополнительно введенные обмотки соленоида 4. Все это заключено в гибкий кожух 5. Регулируемый источник 6 тока соединен с обмоткой соленоида 4,Рука манипулятора работает...
Устройство для стыковки сменного схвата с рукой манипулятора

Номер патента: 1556896
Опубликовано: 15.04.1990
Автор: Захаров
МПК: B25J 15/04
Метки: манипулятора, рукой, сменного, стыковки, схвата
...сменный схват 7, на торцовой части которого закреплен посадочный штырь 8. Первый постоянный кольцевой магнит 3 имеет возможность поворота по резьбе относительно руки манипулятора 1 и может быть зафиксирован контргайкой 9. Схват расположен в гнезде 10 кассеты 11, предназначенной для хранения сменных схватов. В руке манипулятора 1 выполнен канал 12 для подвода рабочей среды к сменному схвату 7. На посадочном штыре 8 установлено уплотнительное кольцо 13. Торцовая часть кассеты 11 выполнена из магнитного материала.Устройство работает следующим обрапостоянный кольцевой магнит 3 устанавливается на руке манипулятора 1 в такое положение, чтобы при стыковке с постоянным кольцевым магнитом 5 их разноименные полюса совместились. Это положение...
Исполнительное устройство манипулятора

Номер патента: 1558660
Опубликовано: 23.04.1990
МПК: B25J 1/02
Метки: исполнительное, манипулятора
...винтовую пару, причем направ-,ление резьбы вала 1 О и гайки 17 обратное направлению резьбы вала 5 и гайки 11,Вал 16 образует винтовую пару с 45гайкой 18, закрепленной на торце телескопического звена 4, Направлениерезьбы вала 16 и гайки 18 такое жекак и у вала 5 и гайки 11, .Исполнительное .устройство манипу 5лятора работает следующим образом,При переходе иэ исходного положения (фиг,1 при вращении вала 5 через гайку 11 происходит выдвижениетелескопического звена 2, При этомвап 5 передает вращение через шпонку 6 втулке 8 с закреппенной на нейшестерней 7, которая передает вращение на зубчатое колесо 9, приводящее во вращение вал 1 О, .который через гайку 17 перемещает телескопическое звено 3,Одновременно при вращении вала10 через...
Привод манипулятора

Номер патента: 1558670
Опубликовано: 23.04.1990
Авторы: Верховский, Колчин, Кудрявцев, Машуров, Уваров
МПК: B25J 17/00
Метки: манипулятора, привод
...лент 18 жестко связан с гибким колесом 12, а противоположныйконец жестко связан с валом 19 соответствующего натяжного механизма 20. На валах 19 жестко установлены храповые колеса 21, которые препятствуют самопроизвольному провороту этих валов 1 9 за счет применения подпружиненных фиксаторов 22, Эти фиксаторы 22 установлены подвижно в корпусе 9 привода 3, а усилие Фиксации регулируется винтом 23При перемещении исполнительного органа 1 к объекту манипулирования осуществляется подача энергии к двигателю 1 О. При этом начинает врашаться его выходной вал, который в свою ,очередьвызывает вращение волнообразователя 11. Вследствие этого вращения появляется бегущая волна деформации на гибком зубчатом колесе 12, Зубчатый венец 13, образуя...
Очувствленный схват манипулятора

Номер патента: 1309450
Опубликовано: 15.05.1990
Авторы: Виноградов, Останина, Семенов, Яковлев
МПК: B25J 13/08, B25J 19/02
Метки: манипулятора, очувствленный, схват
...режимно13090 При воздействии усилия по осн Хтензореэисторы 17, 20, 21, 24, 29,30, 31; 32 испытывают сжатие, а тензореэисторы 18, 19, 22, 23, 25, 26,27, 28 - растяжение.Мост, образованный тензорезисторами 17-24,обладает чувствительностьюк усилию по оси Х, так как плечи моста, образованные тензореэисторами 17и 21 и тенэорезисторами 20 и 24, имеют один и тот же знак изменения сопротивления и включены в протиноположные плечи моста, тензорезисторы двухдругих противоположных плеч мостаимеют другой знак изменения сопротивления, Остальные два моста не обладают чувствительностью к усилию по осиХ, так как при этом нсе тензорезисторы, входящие н один м:.ст, имеют одини тот же знак изменения сопротивления фПри воздействии усилия по оси 1испытывают...
Задающее устройство копирующего манипулятора

Номер патента: 1563962
Опубликовано: 15.05.1990
Авторы: Джамалов, Джолдасбеков, Слуцкий
МПК: B25J 3/00
Метки: задающее, копирующего, манипулятора
...которых связаны основными гибкими тягами 9, На дополнительных стойках 6 одной из платформ 4 установлены дополнительные потенциоматрические датчики 10, связанные с до полнительными стойками 6 другой из платформ 4 посредством дополнительных гибких тяг 11. Оси 12 основных потенциометрических датчиков 7 и оси 13 дополнительных потенциометрических датчиков 10 подпружинены пружинами 14 и снабжены тормозами 15, которые через систему управления связаны сдатчиками нагрузки, устанавливаемыми наисполнительном органе манипулятора. На рукоятке 2 могут размещаться тумблер16, упоавляющий сжатием или разжатием схвата, установленного на исполнительном органе манипулятора, и тумб-. лер 17, включающий или выключающийработу тормозов 5.4 О Устройство...
Устройство для шагового перемещения манипулятора

Номер патента: 1563964
Опубликовано: 15.05.1990
Авторы: Диперштейн, Сахно, Флейтман
Метки: манипулятора, перемещения, шагового
...показана связь со шкивом 25 двух гибких тяг, основной 6 и допол,нительной 13, соединенных с фиксатором 8 и дополнительным Фиксатором 14, взаимодействующих с одной направляюЩей 2, 30На фиг.5 показано соединение гибких тяг 5 и 6, соединенных с фиксаторами и шкивом 4, при котором они наматываются на шкив 4 противоположными поверхностями. Устройство работает следующим об 35 разом.Двухпозиционный привод крутильных колебаний 3 возбуждает крутильные колебания шкива 4 (фиг.1), эти колеба 40 ния через гибкие тяги 5, 6 передаются фиксаторами 7, 8, Пружины 9, 10 способствуют возврату Фиксаторов в исходное положение. Синхронно с колебаниями фиксаторов 7, 8 на них посту пают импульсы электрического тока, в результате чего они, периодически...
Схват манипулятора

Номер патента: 1563972
Опубликовано: 15.05.1990
Автор: Попов
МПК: B25J 15/00, B25J 15/02
Метки: манипулятора, схват
..."Патент", г,ужгород, ул. Гагарина,101 Изобретение относится к машино" троению, а именно к робототехнике,Целью изобретения является расшиение технологических возможностей путем возможности захвата деталей в стесненном пространстве благодаря малым поперечным габаритам.На чертеже показан схват манипулягора., 10Схват манипулятора содержит П-обазный корпус 1, губки в виде упруих пластин 2 с приводом 3. Одним онцом с помощью винтов 4 пластинызакреплены на корпусе 1, на каждой 15 стороне которого размещено по крайней мере по одному ограничителю 5 деформаЦии губок. Схват работает следующим образом. Схват подается в стесненное прост ранство к детали 6. С помощью привода 3 свободные концы пластин 2 перемещаются в направлении винтов 4. Благодаря...
Вакуумный схват манипулятора

Номер патента: 1565685
Опубликовано: 23.05.1990
Авторы: Бросалин, Краснослободцев, Шаралапов
МПК: B25J 15/06
Метки: вакуумный, манипулятора, схват
...в электростатическом поле со стороныэлектрета на одноименно заряженную мембрану она переместится в крайнее нижнееположение. Схват манипулятора помещаютна поверхность транспортируемой деталии между ней и мембраной 2 образуется замкнутая камера с уплотнением в виде эластичного элемента 7. Затем изменяют полярностьподаваемого на мембрану 2 напряженияна противоположную (положительную), что50 формула изобретения 1. Вакуумный схват манипулятора, содержащий. корпус с эластичным элементом на его рабочем торце, вакуумобразующий элемент в виде мембраны, установленной в полости корпуса, и привод перемещения мембраны, отличающийся тем, что, с целью упрощения конструкции и повышения на 55 приводит к притяжению мембраны 2 поддействием кулоновских сил...
Беззазорный привод по меньшей мере для одной главной оси манипулятора

Номер патента: 1567129
Опубликовано: 23.05.1990
Автор: Эрнст
МПК: B25J 17/00, F16H 55/18
Метки: беззазорный, главной, манипулятора, меньшей, мере, одной, оси, привод
...стальной зубчатой ступени, Если использовать четырехступенчатую передачу, то третья ступень может быть выполнена в качестве стальной зубчатой передачи.Ведомое колесо 28 второй ступени 20 установлено в корпусе 32 через подшипник 33Соединенная с ведомым колесом 28 втулка 34 воздействует через зажимное приспособление 35 (фиг.З) на третью ступень 21, выполненную в качестве стальНой зубчатой передачи, например, с цилиндрическим зубчатым зацеплением. Для привода третьей ступени 21 предусмотрены две части 36 и 37 шестерни, которые выполнены с торсионной затяжкой друг относитель 5156/1 но друга. Они воздействуют на ведомое колесо 38, втулка 39 которого затянута через винтовое соединение 40 с втулкой 29 опоры стрелы 9. 1 ри этом колесо 38...
Исполнительное устройство манипулятора

Номер патента: 1569219
Опубликовано: 07.06.1990
Автор: Гвоздев
МПК: B25J 1/02
Метки: исполнительное, манипулятора
...2 входной пары шарнирного параллелограмма, а второй и четвертый блоки связан со звеньями 9 выходной пары, которые связаны с выходным звеном 10, например захватным органом, и образуют второй шар " нирный параллелограмм. 55Устройство работает следующим образом. При повороте вала 4 от приводного двигателя вращаются в ту же сторону .-енья 2 входной пары шарнирного пар,ллелограмма, а вместе с ними - п-.рвый и третий блоки зубчатых колес1 г, 3), второй и четвертый блоки зу .;атых колес вращаются в противо- полы.ную сторону, что приводит к вращению звеньев 9 выходного эве 10. При этом зубчатые колеса, , а положенные на смежных валах, причтельно прижимаются пружинами 7 таким образом, что их пары, установленные на одном валу, стремятся...
Захват манипулятора

Номер патента: 1569225
Опубликовано: 07.06.1990
Автор: Жданов
МПК: B25J 15/00
Метки: захват, манипулятора
...к мг ц ц НОТ 1 н;НИЮ, Ц и ГС 1 ЦЬ. К МСХ 1 ЦИЗ; 1. Гомым цГп О ) зычно)111 оЦель 1.1 бцетенця цпзя 1 сг;,диапазона Грк;цецця.На фцг. 1 цоказа 1.. Г .Г,тора. 1 бцц Нцд н разр 1 зе;а . Гр за 3 1 .1, а фиг 1Зцхв 1, со ц ржцт основание 1, на к Г" Ожсс:,ц Га крецлен привод двусторо,:егодейстц ц силовой цилиндр 2, штОк 3 еотоРОГО сц 1 бжгц жестко соединенной с ним трц.ВГрс" 1 Ь Основании также закреглеыН 1 а 1 ц:л:) . як им;ц 1 е ГУбки ь с осте Н 01.лоц.:.:, 1 с;", ццмц цр;жццой 6 ц с Охцатыв 1, ь, зхбкКсл 1,цс.,;-Г 1 г,1 О; (, По.-,в(ц 1 ецц). ц)Гис.1 хбк,. с; .; ей Я к тп;.ворсе 4за х ГГ р 1 б(1 ееле .у) ци, СГ 1 разс) цЯЦ 1;1 Г, 1,О , ПГЦКОН Ц И ";. ВЕ)Ссс цццц ц:1 я со 1 О: 5 Ги, ОНО"О 1Иц",Гза, Ц 1 Х. 1 "сЦ Ц,Пх Ней ГОПКО. . Х Па...
Захват манипулятора

Номер патента: 1569226
Опубликовано: 07.06.1990
Авторы: Бостан, Ботез, Бурдужа, Дулгеру, Поляруш
МПК: B25J 15/00
Метки: захват, манипулятора
...является расширение функциональных возможностей за счет установки дополнительного конического колеса, направление вращения которого противоположно направлению вращения основного зубчатого колеса. На фиг. 1 показан захват манипулятора; на фиг. 2 - вид А на фиг, 1; на фиг. 3 - вариант исполнения схватов. Захват манипулятора содержит корпус 1, в котором размещен электродвигатель 2 и прецессионный редуктор 3. Редуктор 3 включает сателлитный блок колес 4, содержащий зубчатые венцы 5 и 6, которые входят в зацепление с одной стороны с неподвижным зубчатым колесом 7, а с другой - с двумя ведомыми зубчатыми колесами 8 и 9. ь 1 исло зубьев зубчатого колеса 8 на одно меньше, чем число зубьев венца сателлитного колеса, а число зубьев зубчатого...
Схват манипулятора

Номер патента: 1569227
Опубликовано: 07.06.1990
Авторы: Алуф, Кассир, Моложавцев, Павловский, Юшков
МПК: B25J 15/00
Метки: манипулятора, схват
...устройство выполнено в виде трубы 21, закрепленной не. стенках, корпуса, прн этом и в трубе н на боковых стенках корпуса выполнены продольные щели 22, сообщающиеся между собой и равные длине зажимаемого пакета деталей. Внутри трубы размещен эластичный резиновый) рукав 23, к которому подводится сжатый воздух, или он соединяется с атмосферой обычным пневмораспределителем.Схват работает следующим образом.Лента 20 конвейера, перемещаясь слева направо, перемещает ориентированные пластины 8, уложенные на шнурах 19 с перекрытием 14 - 30 мм. При движении первая пластина надвигается на клиновидный 5 10 15 20 30 упор 14 и занимает положение, параллельное его поверхности, заходя в соответствующую ячейку крышки 3. При этом так же...
Захват манипулятора

Номер патента: 1569228
Опубликовано: 07.06.1990
Авторы: Бройт, Выборнов, Гаврилов, Пятков
МПК: B25J 15/00
Метки: захват, манипулятора
...выполненные в виде бесконечных замкнутых лент. Один из роликов на каждой захватной губке имеет автономный привод. Кроме того захватные губки снабжены индивидуально управляемыми механизмами натяжения лент, При включении приводных роликов в нужном направлении и с нужной скоростью можно осуществлять вращение детали, зажатой между лентами, ее перемещение вдоль губок или совместное вращение и перемещение. Кроме того, наличие и иди видуально управляемых меха н измов натяжения лент позволяет осуществлять все указанные операции с деталями, отличными от цилиндрических в поперечном сечении.2 ил,ними. Под действием привода 4 губки перемещаются до соприкосновения с изделием. За счет работы индивидуальных приводов 1 О натяжения бесконечные ленты...
Захват манипулятора

Номер патента: 1569229
Опубликовано: 07.06.1990
Автор: Яснов
МПК: B25J 15/00
Метки: захват, манипулятора
...пеоемещеции захвата рукой 20 вертикально Вниз выступ 16 рычага 15 прижимает заготовку 21 к плоскости 22, Гяст, гивяя пружину 8, а острие клина 7 перс МРЦЯРТС 5 ИЗ ТОЧКИ В ТОЧКУ В И, СО.поикоснувшись с плоскостью 22,;)еремещается в точку С, прц этом рычаг 5 поворацивается против часовой стрелки, растягивая пр.жину 13. тоцкя С траектории острия слиня 7 соответствует остановке руки 20. После этого В пор)цневую по Фор)ула изобргтеии 45 50 55 5 э; :)Ц 30 35 4 О,)с)сть цилиндра 3 подается давление, при этом иток 4 выдвигается в сторону заготовки 21, перемещая осью 6 рычаг 5, который совершает сложное движение, состояГцее из вращения его по часовой стрелке Вокруг оси 9 под действием пружи)Гь 3 и вра.цения самой оси 9 совмест- нО с тягой 10...
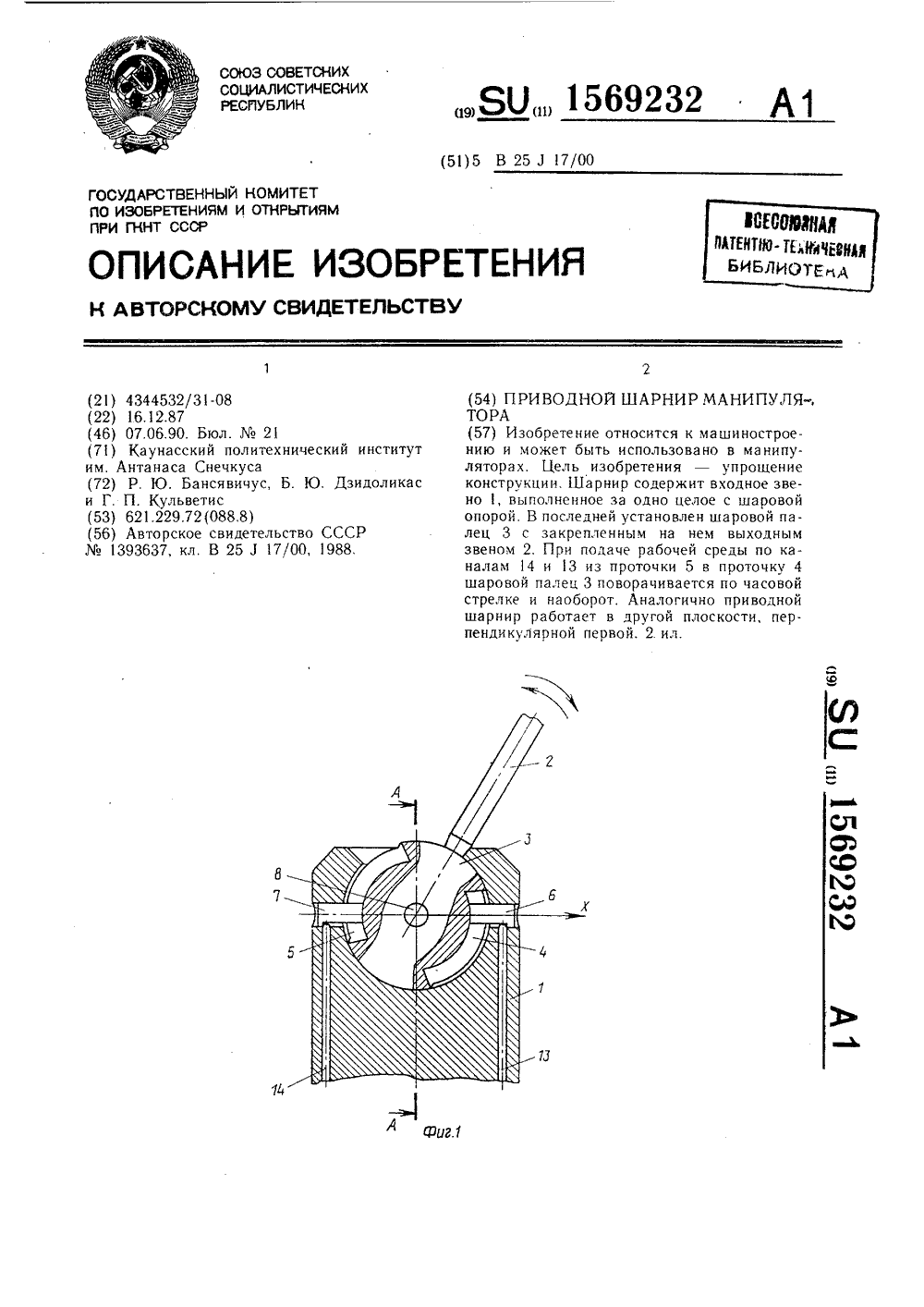
Приводной шарнир манипулятора
Номер патента: 1569232
Опубликовано: 07.06.1990
Авторы: Бансявичюс, Дзидоликас, Кульветис
МПК: B25J 17/00
Метки: манипулятора, приводной, шарнир
...с шаровой опорой, выходное звено 2 и шаровой палец 3. В нем образованы проточки 4 и 5, которые разделяются цилиндрическими лопатками 6 и 7, закрепленными на корпусе входного звена 1. Проточки 4 и 5 и лопатки 6 и 7 образуют герметичные полости. Цилиндрические лопатки 8 и 9 закреплены на шаровом пальце 3 и разделяют полости 10 и 11. Они выполнены в сферической поверхности входного звена 1, которое имеет сьемную верхнюю часть 12, являющуюся продолжением шаровой опоры. Каналы 13 - 16, выполненные в корпусе входного звена 1, служат для подачи рабочей среды. Приводной шарнир манипулятора работает следующим образом.Поворот шарового пальца 3 вместе с выходным звеном 2 вокруг оси У по часовой Редактор О. ЮрковецкаяЗаказ 1420ВНИИПИ...
Привод манипулятора подводного аппарата

Номер патента: 1569443
Опубликовано: 07.06.1990
Авторы: Каширин, Мирный, Седых
МПК: F15B 11/02
Метки: аппарата, манипулятора, подводного, привод
...3 нагнетания,Привод работает следующим образом. тупает на вход распределителя 2 иодновременно на блок 23 и далее навход компаратора 24. Это обеспечивает надежное срабатывание клапана 16и подачу жидкости под давлением вполости 13 и 1,4 гидрозамков 7, 8.Гидрозамок срабатывает, открывая проход рабочей жидкости через клапанныеполости 9 и 10, что приводит к перемещению исполнительного органа 1.1 ил. При подаче от источника 19 электрического управляющего сигнала, изменяющегося по величине и знаку, происходит пропорциональное этому сигналу смещение распределителя 2. Одновременно управляющий сигнал через блок 23 выделения модуля подается на вход компаратора 24. При превышении управляющим сигналом по модулю некоторого порогового значения...
Схват манипулятора

Номер патента: 1572804
Опубликовано: 23.06.1990
Авторы: Зинченко, Кодра, Сенишин
МПК: B25J 15/00
Метки: манипулятора, схват
...введенного датчика разности давлений. Составитель М.ИлюковичРедактор О.Головач Техред М.Ходанич Корректор В.Кабаций Заказ 1610 Тираж 694 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ,и. 1 агарпна,101 Изобретение относится к машиноСтроению и может быть использовано вкачестве захватного органа роботаманипулятора.Цель изобретения - расширение/функциональных возможностей схватаманипулятора путем. распознавания наличия захваченной детали,На чертеже изображен схват маниулятора, общий вид,Схват манипулятора содержит труби Бурдона 1, внутренние полости 2которых каналом 3 соединены с источ 1 иком...
Захватная головка манипулятора

Номер патента: 1572806
Опубликовано: 23.06.1990
Авторы: Коноплянко, Ручка, Рябов, Селиванов
МПК: B25J 15/00
Метки: головка, захватная, манипулятора
...движения валат.е. схват 17 с.деталью при этомповорачивается в сторону продолженияуже остановившегося его линейногосмещения, изгибая спиральную пружину18 относительно ее среднего положения. Продолжающееся сканирование запястья уже осуществляет угловое "рыскание" детали, При нахождении требуемого линейного и углового взаимногоположения деталей сборки дальнейшееизлишнее сканирование стакана 16компенсируется спиральной пружиной18. Таким образом, максимум за дваоборота привода 13 и несколько оборотов привода 6 сборочная системаприходит в требуемое положение сначала по линейному, затем по угловомуразбросу допусков, максимальные суммарные пределы которых заданы величиной эксцентриситета втулки 2 и соответствуют охватывающей окружности нг...
Захватное устройство манипулятора

Номер патента: 1572807
Опубликовано: 23.06.1990
Авторы: Кондратенко, Марковский, Филаретов
МПК: B25J 15/00
Метки: захватное, манипулятора
...пальцы4 и 5 сходятся, зажимая заготовку. 40,Обеспечив создание первым схватом тре, буемого сжимающего усилия системауправления манипулятора отключает привод 16 и обмотку электромагнита 25первого Аиксатора, стержень 23 которого под действием пружины 22 входитв одно из углублений 26, обеспечиваянадежное удерживание заготовки и фиксацию первого схвата относительно основной головки 2. Затем манипулятор 50перемещает захватное устройство с заготовкой к токарному станку, в частности второй схват с пальцами 6 и 7 -к обработанной на станке детали так,что продольная ось детали перпендикулярна продольной оси захватного устройства, Патрон станка опускает деталь, при этом одновременно подаетсяпитание на привод 16 и обмотку электромагнита 25 второго...
Устройство управления приводом шарнирно-рычажного механизма уравновешивающего манипулятора

Номер патента: 1572985
Опубликовано: 23.06.1990
Авторы: Алекса, Бакрымов, Белоусов, Винничук, Долгов, Иоффе, Лукоянов, Мовчан, Шматков
МПК: B66C 13/20
Метки: манипулятора, механизма, приводом, уравновешивающего, шарнирно-рычажного
...и величиной давления в камере 27 управления, Выходной сигнал суммирующего пневмоклапана 12 поступает на первый вход сумматора 13. При отсутствии сигналов на втором и третьем входах сумматора 13 выходной сигнал его всегда будет равен входному сигналу, поступающему от суммирующего пневмоклапана 12, т.е. в данном случае сумматор работает в режиме повторителя. Выходной сигнал сумматора 13 поступает в камеру 44, управления элемента 16 сравнения.Действие элемента 16 сравнения основано на принципе компенсации сил. Давление в управляющей камере 44 создает на мембране усилие, которое уравновешивается усилием от давления сжатого воздуха на мембранах камеры 42 обратной связи и усилием пружины 47. Так как эффективная площадь мембраны камеры 40...
Модуль резонансного манипулятора

Номер патента: 1576304
Опубликовано: 07.07.1990
Авторы: Акинфиев, Белов, Кошель, Юрченков
МПК: B25J 9/00
Метки: манипулятора, модуль, резонансного
...защелка 9 попадает в гнездоподвижного звена, соответствующееэтому крайнему положению. Двигатель5 отключается, а пружина 7 оказывается более закрученной, чем пружина6. Более предпочтительным являетсятакой предварительный натяг пружин6 -и 7, при котором в любом из крайних положений подвижного звена 2обе пружины находятся под нагрузкойодного знака,Такое нагружение значитепьно уве личивает срок службы пружин и, крометого, исключает люфт в местах соединения пружин с подвижным звеном иликорпусом. Наличие дополнительнойпружины с противоположным направлением навивки расширяет, кроме того,пределы настройки привода, так какодновременным укорачиваем или удлинением рабочих частей обеих пружинможно регулировать их жесткость вшироких пределах,...
Задающее устройство манипулятора

Номер патента: 1576309
Опубликовано: 07.07.1990
Авторы: Джамалов, Индулов, Слуцкий, Трунов
МПК: B25J 13/02, B25J 3/00
Метки: задающее, манипулятора
...пластинами 12,закрепленными одним концом на. основании 2. Упругие пластины разделенына три группы: упругие пластины 3,7 и 8 взаимодействуют со стержнем 9, упругие пластины 5 и б. - сосферой 10; а упругие пластины 12 - спальцами 11. На упругих пластинах3-8 и 12 установлены датчики 13-20положения, На рукоятке 1 управленияустановлен, тумблер 21 для сжатия илиразжатия схвата исполнительного органа манипулятора, Датчики 13-20 положения выполнены в виде тензодатциков 22 или контактных датчиков 23.Устройство работает следующимобразом,Оператор манипулирует рукояткой1 управления, при этом осевые перемещения стержня 9 вызывают деформацию упругих пластин второй группы,отклонения стержня 9 от оси вызываютдеформацию упругих пластин первой 7 б 3...