Патенты с меткой «манипулятора»
Схват манипулятора

Номер патента: 905063
Опубликовано: 15.02.1982
Авторы: Горячко, Клюкин, Попов, Смирнов
МПК: B25J 15/00
Метки: манипулятора, схват
...достигается тем, что пантогра механизм выполнен в виде основного полнительного параллелограммов, п одно из звеньев основного параллело ма жестко связано с приводом прямол ного перемещения и на противополо звене этого параллелограмма разм призматическая губка, а одно из сме звеньев этого параллелограмма шар связано со звеном дополнительного п лелограмма, причем смежное с ним фныи и доричем грам- инейжном ещена жных нирно арал- звено аллелограмма жестко а на противоположномплоская губка.ажен схват, общий вид.ат устроен следующим 1 установлен силовой м 3, который жестко входящим в механизм грамма, включающего, и 6 и призматическую время дополнительный ючает звено 8, связан- скую губку 9 и звено же является одним из...
Схват манипулятора

Номер патента: 905064
Опубликовано: 15.02.1982
Авторы: Костюк, Резников, Ямпольский
МПК: B25J 15/00
Метки: манипулятора, схват
...11 подачи рабочей среды через подводные каналы 2 в полости стержней 3 из источника 12 рабочей среды, тяга 13 - в крайнем положении (левом для левой группы стержней 3 и правом для правой группы стержней 3). При подаче .сигнала от системы управления манипулятора на захват детали 15 начинается подвод рабочей среды из источника энергии 12. При этом под действием силы давления рабочей среды стержни 3 начинают выдвигаться в направлении захватываемой детали 15, а пружина 6 работать на растяжение. При контакте стержня 3 с захватываемой деталью 15 усилие контакта через головку 8 стержня 3 передается на датчик 9 измерения усилия. Под действием усилий, возникающих при контакте головки 8 стержня 3 с поверхностью детали 15 изменяется проводимость...
Привод манипулятора

Номер патента: 905066
Опубликовано: 15.02.1982
Авторы: Жеребцов, Ковригина, Петров
МПК: B25J 17/00
Метки: манипулятора, привод
...с основным двухвенцовым сателлитом 8. Возможен вариант размещения дополнительного центрального колеса и механизма разворота в корпусе, когда дополнительный двухвенцовый сателлит взаимодействует одним своим венцом со вторым центральным колесом, а другим венцом - с дополнительным центральным колесом, а также, когда дополнительное центральное колесо с механизмом разворота установлено в рычаге, а дополнительный двухвенцовый сателлит взаимодействует одним своим венцом с дополнительным центральным колесом, а вторым - с первым и третьим центральными колесами,Привод манипулятора работает следующим образом,Перед работой привода для улучшения динамических и точностных характеристик необходимо устранить зазоры в кинематической цепи редуктора,...
Исполнительный орган манипулятора

Номер патента: 906685
Опубликовано: 23.02.1982
МПК: B25J 1/02
Метки: исполнительный, манипулятора, орган
...распределителя связаны одинс атмосФерой, а другой - с пневмомагистралью, а выходы - с полостями пневмоцилиндров 11 и 12, при этом 25 эле ктромагнит двухполостного распределителя соединен с выходом системы 21 управления.Устройство работает следующим образом, 369 ри отсутствии предмета в захвате 6, что соответствует отсутствию сигнала с системы управления 21,обмотка электромагнита двухполостного распределителя обесточена и двух" полостный распределитель узла управления 13 находится в исходном положении, При этом верхние полости пневмоцилиндров 11 и 12 соединены спневмомагистралью,. а нижние - с атмосферой, и штоки находятся в крайнем нижнем положении, ограниченном регулируемыми упорами 1 б, которые выбираются таким образом, что...
Рука манипулятора

Номер патента: 908587
Опубликовано: 28.02.1982
Авторы: Бабич, Савельев, Смирнов
МПК: B25J 9/00
Метки: манипулятора, рука
...в зацеплении с рейкой 8.Правым квадратом торсион связан со втулкой 18, в которую запрессован штифт 19, сидящий в пазу 20 стакана 21. Стакан 21 связан с выходным валом 12 посредством штифта 22. Для фиксации торсионного вала.15 в осевом направлении служит винт 23, ввернутый в толкатель 24. Упор 25 фиксируется винтом 26 относительно паза 27 стакана 21.Устройство работает следующим образом.Для выдвижения кисти манипулятора включают двигатель 11, Вращающийся момент от двигателя 11 через конический редуктор 10 поступает на выходной вал 12 и через крестовую муфту 13 передается зубчатому колесу 14. Последнее воздействует на рейку 8, которая осуществляет поступательное движение подвижной направляющей 2 и жестко с ней связанной кисти 3....
Устройство для крепления питающего шланга к поворотной части кузнечного манипулятора

Номер патента: 910302
Опубликовано: 07.03.1982
Авторы: Кокин, Колупаев, Осипов, Сташенко
МПК: B21J 13/10
Метки: крепления, кузнечного, манипулятора, питающего, поворотной, части, шланга
...1 изображройстгак поформула и э о б р е т е н и я10 3 91030Устройство содержит плоскую спиральную ленточную пружину 1, установленнуюнижним торцом на основании 2 и прикрепленную внутренним концом к опорному кольцу 3 основания. Основание 2 закреплено на поворотной части 4 манипулятора. Наружный конец пружины закреплен при помошн кронштейна 5 на неподвижной части 6 манипулятора. Ва верхнем торце пружины вдоль ленты установлена предохранительная прокладка 7 и с лентой болтовыми креплениями 8 соединены хомуты Э с разделительными упорами 10, В хомутах закреплены опирающиеся на предохранитель- д ную прокладку питающие шланги 11. Нейтральная плоскость изгиба шлангов совпадает с нейтральной плоскостью изгиба ленты пружины. Основание 2 может быть...
Захват манипулятора

Номер патента: 910410
Опубликовано: 07.03.1982
Авторы: Игнатьев, Самарский, Скокова
МПК: B25J 15/00
Метки: захват, манипулятора
...манипулятора состоит иэ корпуса 1, тяги 2, блока 3, тросика 4, пропущеммого через блок, и большего количества паль. цев 5, которые закреплены на пружинящем элементе - плоских пружинах 6, Пружины 6 служат для разжимания пальцев при ослаблении натяжения тросика 4,Захват манипулятора работает следующим образом.При отсутствии натяжения тяги 2 пружины: 6 занимают первоначально заданное им поло. жение. При приложении усилия к тяге 2 тросик 4 натягивается, преодолевая сопротив.Формула изобретения иковаКорректор Сй 1 ом ехред А,Ач едактор П. Горькова Тираж 1082 ВЯИИПИ Государственного комитета С по делам изобретений н открытий 3035, Москва, Ж, Раушская наб., д.каз 983/14 СН ППП "Патент", г. Ужгород, ул. Проектная,3 , 910410 4ление...
Привод вертикального перемещения хобота ковочного манипулятора

Номер патента: 912390
Опубликовано: 15.03.1982
Авторы: Грабер, Кресин, Куница
МПК: B21J 13/10
Метки: вертикального, ковочного, манипулятора, перемещения, привод, хобота
...с поковкой. При включении правого элек тромагнита гидрораспределителя 4 поршневая полость цилиндра 1 вертикального перемещения соединяется со сливом и хобот с поковкой опускается. Во время настройки давления в аккумуляторе 3 по весу поковкинБО включено устроиство 8, которое подает команду на подъем давления в аккумуляторе 3, если замкнут его левый контакт, или на сброс давления, если замкнут правый контакт. Во время подъема давления включен левый электромагнит гидрораспределителя 5, и рабочая жидкость от источника рабочей среды 7 поступает в аккумулятор 3. При сбросе давления включен правый электромагнит гидрораспределителя 5, и рабочая жидкость из аккумулятора 3 поступает на слив. При размыкании обоих контактов устройство 8...
Захват кузнечного манипулятора

Номер патента: 912391
Опубликовано: 15.03.1982
Автор: Гецович
МПК: B21J 13/10
Метки: захват, кузнечного, манипулятора
...серег 13 с соответствующими рычагами 14 и 5 и также. шарнирно установленных на хоботе 10, На рычагах 14 установлены с возможностью вращения ролики 16, а на рычагах 15 в опорах вращения 17 установлены поворотные центры 18. Соосно хоботу 10 установлен в направляющих 19 подпружиненный пружиной 20 корпус 21, связанный штоком 22 с пневмоцилиндром 23. На консольной части корпуса 21 на оси 24 установлен приводной диск 25, связанный посредством обгонной муфты-шестерни 26 со штоком-рейкой 27 пневмоцилиндра 28. Манипулятор обеспечивает обработку заготовки.Кузнечный манипулятор с захватом описанной конструкции работает следующим образом.Отрезанная заготовка после нагрева подается в рычаги 14, которые синхронным выдвижением штоков...
Захват манипулятора

Номер патента: 918085
Опубликовано: 07.04.1982
Автор: Усубаматов
МПК: B25J 13/00
Метки: захват, манипулятора
...10 и 11, поступает по трубопроводу 26 через 3 91808ментов, перед которыми расположены щупы 18 и 19, закрепленные на плунжерах следящих золотников 20 и 21, Гидроцилиндры 10 и 11 соединены тру.бопроводами 22 и 23 со следящими золотниками 20 и 21, которые трубопроводами 24 и 25 соединены с трубопроводом 6. Гидроцилиндры 10 и 11 соединены дополнительно трубопроводом 26 и обратными клапанами 27 и 28 с тру бопроводом 6. Гидросистема зажима детали снабжена трубопроводом 29 слива, Гидронасос 1 трубопроводами 4,30 и 31 через дополнителный реверсивный золотник 32 соединен с дополнительным гид роцилиндром 33 коректировки, шток 34 которого выполнен вильчатым и расположен с возможйостью воздействия на што.ки поршней гидроцилиндра 10 и 11....
Привод исполнительного органа манипулятора

Номер патента: 921846
Опубликовано: 23.04.1982
МПК: B25J 1/02
Метки: исполнительного, манипулятора, органа, привод
...работает следующим образом,При отсутствии предмета в захвате, что соответствует отсутствию сигнала с системы 7 управления, обмотка электромагнита обесточена и двухполостный распределитель 1 находится в исходном положении (фиг.1), 1 О При этом разгрузочный пневмоцилиндр 2, шток которого связан с плечом исполнительного органа, подключен . к основной пневмомагистрали 3. При этом регулятор давления 5 и предохранительный клапан 6 в основной пневмомагистрали 3 настроены таким образом, что на поршень разгрузочного пневмоцилиндра 2 действует давление, уравновешивающее статические нагрузки только от веса конструкции исполнительного органа. При захвате предмета сигнал с системы управления 7 поступает на обмотку электромагнита, шток...
Схват манипулятора

Номер патента: 927486
Опубликовано: 15.05.1982
МПК: B25J 11/00
Метки: манипулятора, схват
...6, который расположен внутри телескопического звена 2. На нижней части корпуса 1 установлен привод 7 вращения, кинематически связанный с рейками 5 через шестерни 8 и 9.Корпус 1 снабжен зубчатыми рейками 10, а на штоке 6 установлены дополнительные рейки 11 и электромагниты 12, а на телескопическом звене 2 установлены фиксаторы 1 3 и пружины 1 4.Схват работает следующим образом.При обесточенном электромагните 12 пружины обеспечивают сцепление фиксаторов 13 с рейками 10 корпуса 1. В этом случае при включении привода 7 вращающий момент через шестерни 9 и 8 передается на рейки 5 штока 6. В результате этого шток 6 перемещается3 927486 4относительно телескопического звена 2 Данное изобретение позволяет сущести осуществляется разведение или...
Рука окрасочного манипулятора

Номер патента: 929239
Опубликовано: 23.05.1982
МПК: B05B 15/00
Метки: манипулятора, окрасочного, рука
...2 и соединена с силовым 3 и уравновеыивающимч цилиндрами. В руке 1 соосно другдругу установлены двигатели 5 и 6,вал 7 последнего из которых соединен с кронштейном 8.На конце кронштейна Смонтированкожух 9 для пневматического краскораспылителя 10. Кожух состоит изкороба 11 с отверстиями 12 под шланги 13 и 11, соединенные штуцерами15 и 16 с краскораспылителем 10,и крышки 17, охватывающей краскораспылитель. Крышка 17 выполнена по"воротной на осях 18 относительно ко"роба 11 и подпружинена пластинчатойпружиной 19 к стенке короба, обращенной к кронштейну.Крышка своими боковыми поверхностями плотно прилегает к наружнымповерхностям боковых стенок короба,а верхней своей частью нескольковыступает по отношению к переднейстенке короба. Место...
Захват манипулятора

Номер патента: 929295
Опубликовано: 23.05.1982
МПК: B21J 13/10
Метки: захват, манипулятора
...13. Напорный канал А гидрозамка 10 связан через обратный клапан 11 и канал Б. с поршневой полостью цилиндра. Управляется гидрозамок 10 от сис темы управления через полость В.Захват работает следующим образом.Для захвата заготовки, подкладного или накладного инструмента следует раскрыть клещи. Жидкость от сети наг нетания подается в канал А гидрозамка 10. Обратный клапан 11 открывается и жидкость по каналу Б попадает в поршневую полость цилиндра. При попадании лцщкости в поршневую полость 2 З цилиндра, поршень 4 со штоком 5 движется вправо, а дополнительный поршень 8, сжимая пружину 9, движется влево до крышки 7, Относительно поршня 4 движется и гильза 3 силового ци- щ линдра. Происходит захват (зажатие) заготовки (инструмента) в...
Модуль манипулятора

Номер патента: 929431
Опубликовано: 23.05.1982
Автор: Хомерики
МПК: B25J 11/00
Метки: манипулятора, модуль
...конец пластины крепится ца наружной поверхности цилиндра 2.Втулка-переходник 4 фиксируется посредством контргайки 12. Подшипник 6 фиксируется шайбами 13, а другой подшипник фиксируется в цилиндрах 1 и 2 посредством стопорного кольца 14 и шайбы 15.В теле цилиндров по периметру имеютсяотверстия 16 и 17 для свободного перемещения газообразной среды, находящейся в полостях цилиндров 1 и 2. Посредством электропроводов 18 и 19 (фиг. 1) подводится питание соответственно к обкладкам конденсатора (стержневый электрод 8 поверхность цилиндра 1) и к пластине 9.55Полые втулки-переходники 4 служат для соединения сустава к другим частям манипулятора. Подшипники 6 и шайбы 7 выпол 4нецы из термостойкого и электроизолирующего материала с малым...
Захват манипулятора

Номер патента: 929432
Опубликовано: 23.05.1982
Авторы: Алпатов, Ивлев, Панченко, Тарасов
МПК: B25J 15/00
Метки: захват, манипулятора
...в эластичной оболочке. Эта информа 929432ция заносится в блок логики, чем и осуществляется настройка захвата на работу с заданным набором деталей разных типов. Вес, прочность и другие параметры деталей в процессе работы захвата непосредственно не определяются, но информацияимеющаяся после настройки в блоке логики, дает возможность формировать давление в эластичной оболочке, соответствующее параметрам данной детали.В рабочую зону манипулятора, например, на ленте транспортера, подаются детали 1 О нескольких типов, каждую из которых, в соответствии с ее назначением, необходимо переместить в нужную позицию. Для этой цели основание 1 с эластичными оболочками 4 при отсутствии силового давления в оболочках надевается на деталь 10, н от...
Способ контроля исправности чехла исполнительного органа копирующего манипулятора

Номер патента: 931461
Опубликовано: 30.05.1982
Автор: Горбунов
МПК: B25J 3/00
Метки: исполнительного, исправности, копирующего, манипулятора, органа, чехла
...всигналы низкой частоты, которые воспринимаются оператором или подаютсяна индикаторные устройства. Это даетоператору возможность, находясь 1 Ов операторском помещении, судить огерметичности чехла исполнительногооргана манипулятора, находящегося вгорячей камере, и о правильности установки чехла. 15. Для осуществления способа акустицеские колебания могут улавливатьсяакустико-пневматическими или электродинамицескими преобразователями. Акус"тико-пневматический приемник с резонатором Гельмгольца, состоящий из горловины и емкости, обладает тем свойством, что амплитуда звукового давления внутри его полости резко возрастает при совпадении частоты колеба 5ний с частотой звукового сигнала, который воздействует на его вход. Собственная частота...
Схват манипулятора

Номер патента: 931464
Опубликовано: 30.05.1982
Автор: Гвоздев
МПК: B25J 15/00
Метки: манипулятора, схват
...посторонних источников света устройство заключено в светонепроницаемый кожух 16. Губки 1 приводятся в движение с помощью силового цилиндра и крепятся к его штокам 17. Корпус 18 имеет отверстие 19 для подвода рабочей среды, Аналогичные отверстия 20 выполнены в крышках 21..Схват работает следующим образом, При подаче рабочей среды к отверстию 19 губки 1 разводятся, схват подводится к предмету, затем путем подачи рабочей среды к отверстиям 20 производится сближение губок 1, и наконечники 4 рабочих стержней 2 вступают в соприкосновение с грузом. Стержни 2 подпружинены пружинами 3 и взаимодействуют с гибкой и нерастяжимой лентой 6, поэтому суммарная величина пути, пройденного рабочими стержнями 2 одной губки 1 от нейтрального положения в...
Захват манипулятора

Номер патента: 931465
Опубликовано: 30.05.1982
Авторы: Ботез, Кирика, Попа, Хаймович
МПК: B25J 15/00
Метки: захват, манипулятора
...4 - вид Б на фиг. 2. Захват манипулятора содержит сочлененные с ладанью 1 пальцы, каждый из которых собран из отдельных звеньев 2, имеющих отверстия 3, фасонные поверхности 4 и направляющие 5 по которым установлены звенья 2 с возможностью перемещения вдоль 15 пальца на пружинящем элементе 6. Вдольодной из фасонных поверхностей 4 звена 2 по его продольной оси симметрии выполнен паз 7, а вдоль другой фасонной поверхности - выступ 8. Звенья 2, образующие пальцы для захвата изделия 9, установлены выступами 8 в пазах 7 соседних звеньев, причем глубина паза 7 больше высоты выступа 8, что обеспечивает контакт зубьев 2 по фасонным поверхностям 4. Через отверстие 3 звеньев 2 каждого пальца пропущен трос931465 А иг,2. Вид иг.7 В. Ушаккас...
Захват манипулятора

Номер патента: 931466
Опубликовано: 30.05.1982
Автор: Долгов
МПК: B25J 15/00
Метки: захват, манипулятора
...захват манипулятора, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А - А на фиг. 1.Захват манипулятора включает корпус 1,установленные на нем соосно в противоположные стороны двигатели линейного перемещения, выполненные в виде цилиндра 2 со штоками-поршнями 3 и 4, имеющи 2 о ми на концах вилки 5, кронштейны б сгубками 7 и параллелограммные подвески, ведущие 8 и ведомые 9 звенья которых связаны с одной стороны с вилкой 5 и корпусом 1 посредством сухарей О и осей 11931466 Формула изобретения фиь.1 соответственно, а с другой - с кронштейнами 6 посредством осей 2. Губки 7 установлены с возможностью поворота на осях 13 относительно ведущих 8 и ведомых 9 звеньев параллелограммных подвесок и фиксации в нужном положении винтами...
Запястье манипулятора
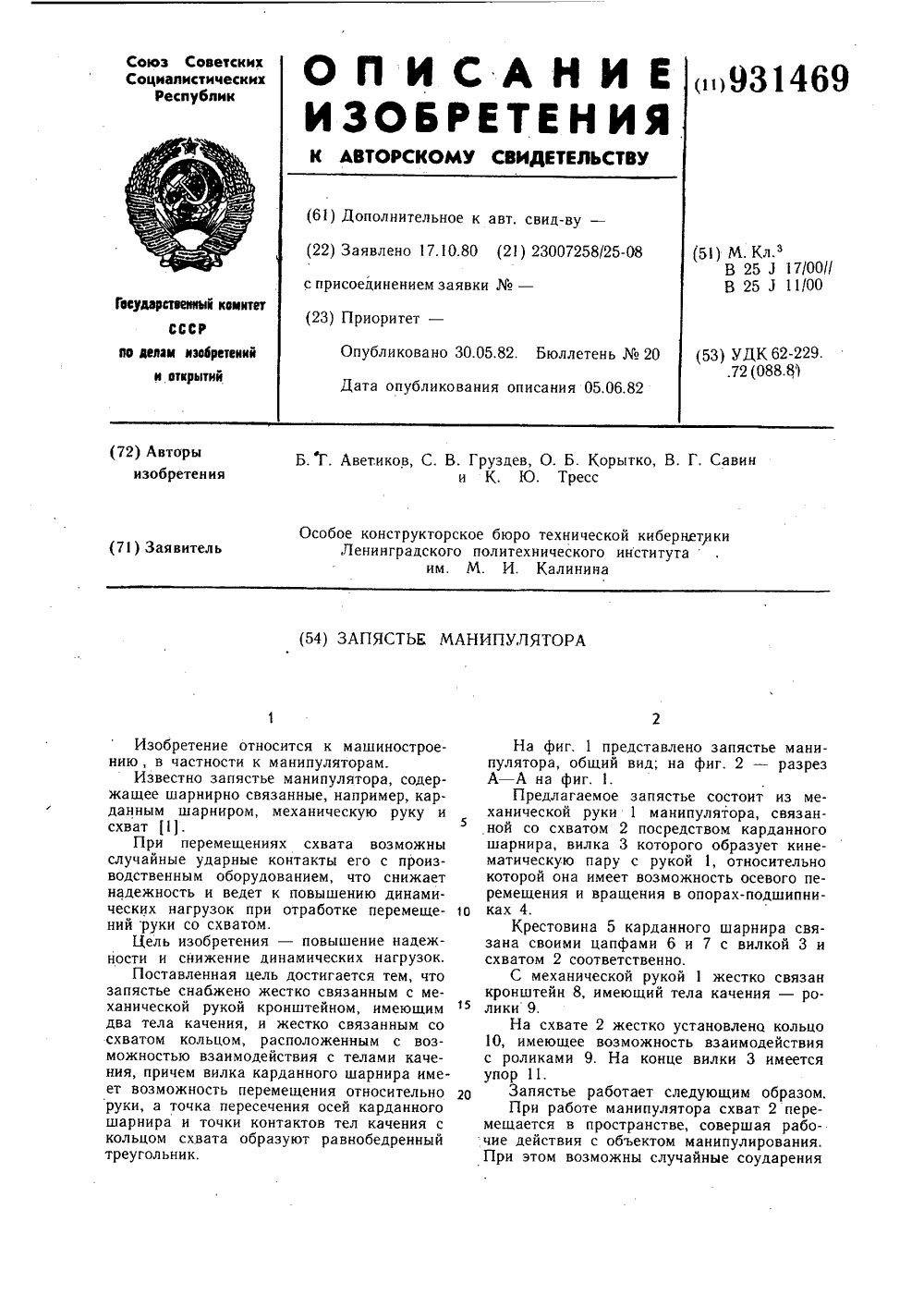
Номер патента: 931469
Опубликовано: 30.05.1982
Авторы: Аветиков, Груздев, Корытько, Савин, Тресс
МПК: B25J 17/00
Метки: запястье, манипулятора
...поверхности кольца 10 с роликами 9 и упорами 11 в подшипник 4.20Пример 2, Схват 2 испытывает боковое усилие от внешнего оборудования, которое возможно при повороте руки 1 манипулятора в горизонтальной плоскости, В этом случае кронштейн 8 вместе с крестовиной 5 поворачивается вокруг оси цапф 6, одно временно происходит отрыв поверхности кольца 10 от одного из роликов 9 и поворот схвата 2 вокруг оси цапф 7, т. е. движение по конической поверхности, вершина которой находится в точке пересечения осей цапф 6 и 7, а телесный угол при вершине определяется расстоянием между роликами 9 и их расстоянием до оси карданного шарнира. При включении обратного движения схвата 2 он под действием собственного веса возвращается в исходное...
Модуль манипулятора тенгиза

Номер патента: 933451
Опубликовано: 07.06.1982
Автор: Хомерики
МПК: B25J 11/00
Метки: манипулятора, модуль, тенгиза
...линейного расширения.При подключении питания оба слояпластины 1 должны расширяться неодинаково, но при этом должны соблюдаться условия целостности пластины1. Это будет иметь место при изгибепластины в сторону слоя с меньшимкоэффициентом линейного расширения.Пластины могут быть выполнены-,например, биметаллическими или бипластмассовыми.Нагрев пластины 1 производитсяпосредством подачи электропитанияв виде тока высокой частоты черезэкранированный провод 9 и его отводы 10 к каждой пластине 1.Ток высокой частоты нагренаеткаждую пластину 1, так как она является незамкнутым токопроводящим,винтом в силу радиального разрезапластины 1.Пластины 1 (как один из вариантов) располагают одну относительно другой слоями с меньшими...
Очувствленный захват манипулятора

Номер патента: 933452
Опубликовано: 07.06.1982
Авторы: Афанасьев, Марков, Хутский
МПК: B25J 15/00
Метки: захват, манипулятора, очувствленный
...усилия сжатия содержит зажиж 1 и 2, губки 3 и 4, выполненные из однородного эластичного деформируемого материала, хорошо поглощающего свет, например каучука,и приклеенные к зажимам 1 и 2 соответственно, полый канал 5, имеющийся,например, в губке 3 и расположенныйперпендикулярно направлению усилиясжатия Рсс, напротив концов которого в зажиме закреплен с однойстороны источник электромагнитногоизлучения, например лампа накаливания 6, а с другой стороны - фотоприемник 7,Устройство работает следующимобразом.В исходном состоянии перед взятием объекта 8 губки Э и 4 не деформированы, и электромагнитное излучение от лампы 6 свободно проходитчерез полый канал 5 и попадает нафотоприемиик 7, в котором преобразуется в электрический сигнал.При...
Схват манипулятора

Номер патента: 933454
Опубликовано: 07.06.1982
Автор: Ирлин
МПК: B25J 15/00
Метки: манипулятора, схват
...1 также размешенподпружиненный фиксатор 7, связанныйс системой управления манипулятором,как информационным датчиком, так итормозом, взаимодействуя с зубчатым 1 О колесом б.Схв: работае; следующим образом,Деталь 8 зажимается между роликами 3,4 и 5 захватных рычагов 1 и 2При переносе детали 8 в рабочую позицию возникают инерционные нагрузки,Удержание детали происходит эасчет стопорения от проворота ролика3 с зубчатым колесом б подпружиненнымФиксатором 7. Усилие стопорения определяется усилием поджима фиксатора7 к зубчатому колесу 6.При подводе детали 8 к рабочей позиции могут возникнуть иэ-за неточности базирования ситуации, когда деталь 8 своим торцом не,попадет вгнездо рабочей позиции 9, В этомслучае усилие поджима превышаетусилие...
Захват манипулятора

Номер патента: 935263
Опубликовано: 15.06.1982
Автор: Перовский
МПК: B25J 15/00
Метки: захват, манипулятора
...4 захвата. Внутри баллона расположены тепловыделяютериал 3 затвердевает, сохраняя свою форму, предмет надежно закреплен в захвате и готов к перемещению, При этом затвердевание материала 3, лишь частично занимающего объем баллона, также происходит быстрее и с меньшими затратами энергии.После переноса предмета и установкиего на новое место отключают холодильник б и включают нагреватель 5, плавкий ма О териал 3 переходит в жидкое состояние. Переводом вентиля 10 соединяют полость трубок 7 с окружающей средой, губки 4 расходятся, рабочий цикл захвата закончен.Таким образом, все операции в,процессе работы захвата осуществляются быстрее 15 и с меньшими затратами энергии за счетсокращения удельного объема плавкого материала, заполняющего...
Телескопическая стрела проходческого манипулятора

Номер патента: 935625
Опубликовано: 15.06.1982
Авторы: Зенякин, Николаев, Романов, Степанов
МПК: E21D 13/04
Метки: манипулятора, проходческого, стрела, телескопическая
...плеча стопорной собачки 1335задана таким образом, что она имеет возможность отклоняться от первоначального положения только в однусторону, заклиниваясь при обратномходе тягового элемента 22.Подвижная секция 14, снабженнаяпазами 23, имеет возможность перемещаться относительно неподвижнойсекции 9 по сопряженным с пазами 23направляющим 24, причем величинаперемещения и тягового усилия находится в прямой зависимости от ходаи силовых характеристик гидроцилиндра 11 раздвижки. Подпружиненныезахваты 15 смонтированы с возможностью их автоматического отключения при выдвижении секции 14,Телескопическая стрела подземного манипулятора работает следующимобразом.Перед началом работы подвижнуюсекцию 14 выдвигают в крайнее переднее положение...
Исполнительный орган манипулятора

Номер патента: 942981
Опубликовано: 15.07.1982
Автор: Гвоздев
МПК: B25J 1/02
Метки: исполнительный, манипулятора, орган
...и 11. На фиг. 1 видно, что группа цилиндровЭ 0420 10 четыре цилиндра) наклонена вниз, а группа цилиндров 11 (четыре цилиндра) наклонена вверх. Силовые цилиндры 10 и 11 расположены по диагоналям ра бочих звеньев-рамок и соединены с ними с помощью сферических шарниров 12 и закрыты крышками 13. Группы цилиндров 10 имеЬТ штуцеры 14 и 15, связанные соответственно .с поршневыми и штоковыми. полостями, Й группа цилиндров 19 11 имеет штуцеры 16 и 17, связанные также с поршневыми и штоковыми полостями этой группы. Четыре штуцера .14, четыре штуцера 15, четыре штуцера 16 и четыре штуцера 17 соответственно 1 соединены между собой трубопроводами (не показаны).Исполнительный орган манипулятора работает следующим образом.При необходимости движения...
Схват манипулятора

Номер патента: 944921
Опубликовано: 23.07.1982
Авторы: Головкин, Таиров, Тонкий
МПК: B25J 15/00
Метки: манипулятора, схват
...изолированы друг от друга повнутреннему объему прокладкой 5. Электроды 1 и 4 соединены с источником6 высокого напряжения. Соединенныепровода изолированы от корпуса 1 20 вставкой 7.Схват работает следующим образом.Для захвата детали к электродам1 и 4 через коммутатор подключаетсянапряжение, и рабочая поверхностьподводится к детали. За счет большогоразмера поверхности плоскости деталии схвата манипулятора хорошо ориентируются параллельно друг другу, Пересекающиеся полосы позволяют работать с деталями различных размеров. ЗО При нажиме манипулятором давлениеПатруше орректор А. Дзятк Тираж 1087 ВНИИПИ Государственного комитета по делам изобретений и открыти 035, Москва, Ж, Раущская наб., аказ 5225/21 Подпи сноеССР филиал ППЙ фПатент,...
Сустав манипулятора

Номер патента: 944922
Опубликовано: 23.07.1982
Авторы: Горбунов, Коровин, Мокрушин, Талайков
МПК: B25J 17/00
Метки: манипулятора, сустав
...прочности системы управления.Для достижения указанной цели сустав манипулятора снабжен расположенным на одном звене дифференциальныммеханизмом, водило которого кинемати чески связано с приводом, а выходные полуоси - с датчиком величины крутящего момента и со вторым звеном соответственно.На чертеже изображ н схематичносустав манипулятора.На корпусе неподвижного звена 1сусТава манипулятора размещен двигатель 2 с расположенным на его валу 3тахогенератором 4 и шестерней 5, которая находится в зацеплении с шестерней водила б дифференциала 7. Полуось 8 дифференциала 7 связана сдатчиком момента 9, а полуось 10 -с подвижным звеном 11 и датчиком по-.ложения 12.Сустав работает следующим образом.При подаче на привод сигнала управления...
Привод продольного перемещения тележки и хобота ковочного манипулятора

Номер патента: 946775
Опубликовано: 30.07.1982
МПК: B21J 13/10
Метки: ковочного, манипулятора, перемещения, привод, продольного, тележки, хобота
...источником4 давления, сливной магистралью ивсасывающей магистралью насоса 2, накоторой установлены подпиточный клапан 12.При включенных электромагнитахнасос 2 разгружен через гидрораспределитель 6, а во всасывающую магистраль насоса поступает жидкость черезклапан 12. Подводы гидромотора 1, подподвод Г цилиндра 3 осевой подачизаперты гидрораспределителями 6 и 9.Подвод В цилиндра 3 осевой подачисоединен со всасывающей магистральюнасоса 2,Привод работает следующим образом.Тележка манипулятора начинает движение во время деформации поковки бойками пресса,. Включается электромагнит гидрораспределителя 6, Жидкость от насоса 2 поступает в подвод А гидромотора. Из подвода 6 гидромотора 1, рабочая жидкость поступает в подвод Г цилиндра 3...