Патенты с меткой «манипулятора»
Схват манипулятора

Номер патента: 1576310
Опубликовано: 07.07.1990
МПК: B25J 15/00, B25J 15/06
Метки: манипулятора, схват
...ра расшитей ворот щий схват, об 2-сеа Фи корубки ключае пулятор ором за плены де эла ыпуцим ичных енные в олненны иненных ройствоглухих матеой вакуумля свед ластичных вид,в разрезе А-А на Фиг. 1Схват мани пус 1, на кот 2 - 5, выпол баллонов, эап риалом и соед системой, уст губок в виде губками, удерживающими Е мя как другая пара губок дновременно со сведениется в обратном направ- Собъекта относительно продольной оси схвата с сохранением удержания объекта давления в трубках 6, 7, 10 и 11 стравяивается, и губки 2 и ч разжимаются, Одновременно прекращается вакуумирование внутренних полостей всех губок, стравливается давление в трубках 8 и 12 на губка 3 и 5, повышается давление в трубках 9 и 13 для сохранения силы захвата объекта и...
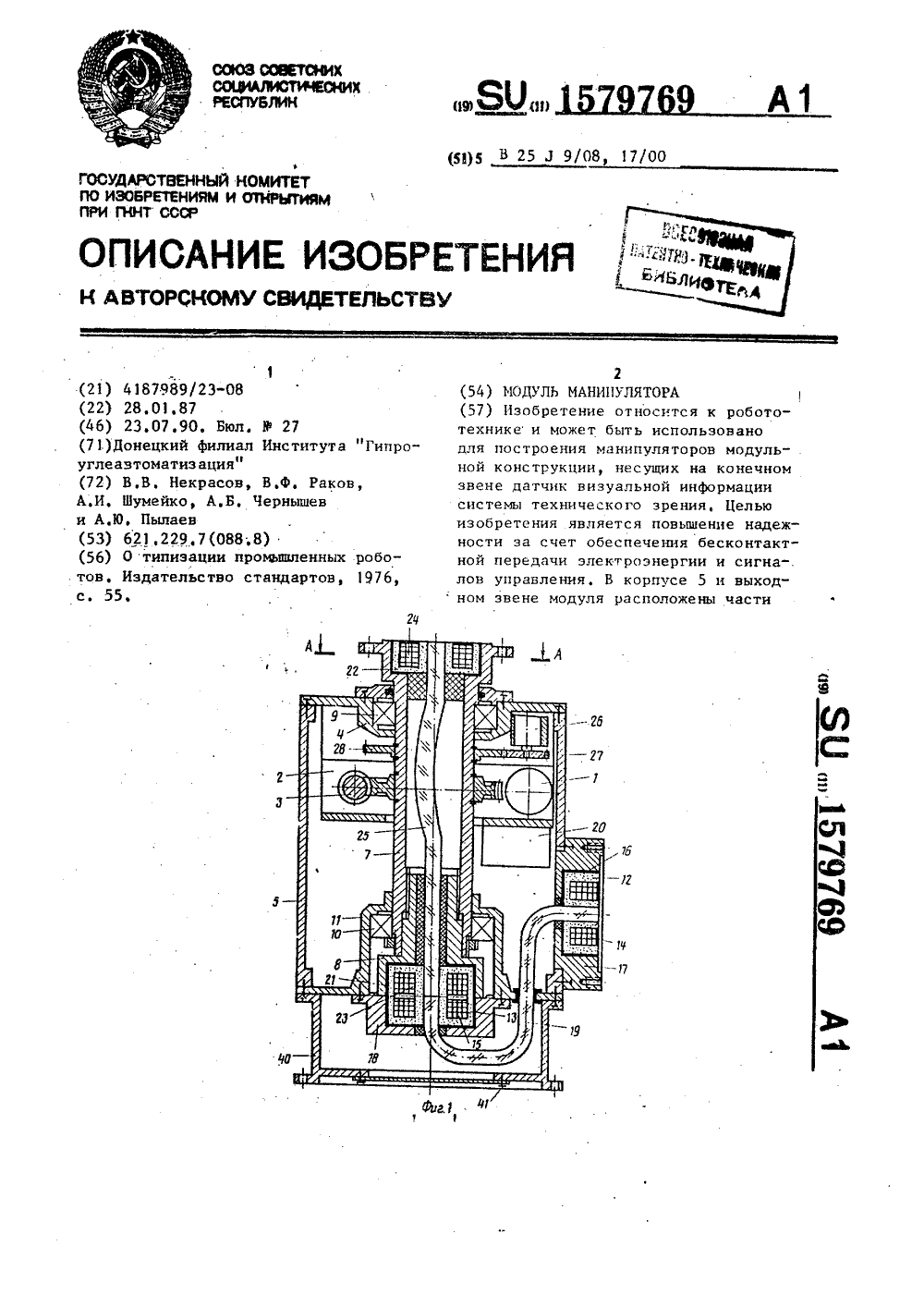
Модуль манипулятора
Номер патента: 1579769
Опубликовано: 23.07.1990
Авторы: Некрасов, Пылаев, Раков, Чернышев, Шумейко
МПК: B25J 17/00, B25J 9/08
Метки: манипулятора, модуль
...1крутящий момент передается через червячную передачу 3 на полый вал 7,а через зубчатые колеса 27 и 28 движение передается на датчик 26 положения, Части стыковочных узлов соосно состыкованы торцами и вращаютсядруг относительно друга. При этомцилиндрическая форма магнитопроводов13 и 2 обеспечивает непрерывную передачу электроэнергии при взаимномвращении выходного звена 6 и корпу.са 5. Аналогично световой (оптический ) сигнал от узла 38 через совмещенные торцы световодов 25 и 19 по-.ступает на вход модуля и вводитсяв кабель связи через стыковочныйузел 39.Конструкция модуля обеспечивает 45возможность и обратной передачи какэлектрических, так и оптических сигналов,.поэтому каждый из внешних стыкованных узлов может быть как входом,так и...
Модуль резонансного манипулятора

Номер патента: 1583283
Опубликовано: 07.08.1990
Авторы: Духанин, Семеноженков
МПК: B25J 11/00
Метки: манипулятора, модуль, резонансного
...также предусмотреныдля регулировки усилия предваритель 50ного поджатия упругих элементов, выполненных в виде пружин 11 и 17.Устройство работает следующим образом.В исходном положении, например,дпя медленного перемещения выходногозвена 1 пружины 11 и 17 сжаты, упор23 пневмоцилиндром 24 введен в отверстие 25 опорной шайбы 18, упоры 8 и 10 взаимодействуют с опорными шайбами 13 и 19, оси рычагов 3 и 4 примерно совпадают, т,е. система занимает положение неустойчивого равновесия. Для начала движения включают двигатель 6, который поворачивает вал 5, а вместе с ним и рычаг 4. Система рычагов 3 и 4 выходит из положения неустойчивого равновесия, а пружина 11, давя на опорную шайбу 13 и на упор 8, разгоняет звено 1 и инерционные массы,...
Схват манипулятора

Номер патента: 1583284
Опубликовано: 07.08.1990
Авторы: Бурдин, Мороз, Резаев, Черевацкий
МПК: B25J 15/00
Метки: манипулятора, схват
...оболочек 5 ссштуцерами 3 должны быть герметичными.Схват манипулятора работает следующим образом.Манипулятор 2 подводит пальцысхвата к рабочему предмету 9. От привода через магистраль 4 давления вовнутренние полости основания 1 и пальцев 5 подается рабочее давление и,достаточное для изгиба пальцев. Под действием давления о угол укладки +(яр" ,мирования) спиралей высохопрочных воло кон 6 изменяется вменьшую сторону (например, если угол й до нагружения равен 70, то под действием давления оностановится меньшим этой величины, т.е. он стремится к углу 55 ч 4 , при ко" тором конструкция имеет равновесную систему). Чем больше значение о,тем на большую величину уменьшается угол + Ц. Физически это изменение угла происходит за счет разворота...
Устройство автоматической смены инструмента манипулятора

Номер патента: 1583286
Опубликовано: 07.08.1990
МПК: B25J 15/00
Метки: автоматической, инструмента, манипулятора, смены
...4), который воздействует на выключатель 17 в моментзакрытия защелок,Устройство работает следующим образом.Рабочий инструмент (захватные устройства и др.), предназначенный дляавтоматической смены, помещается вспециальное магазинное устройство,имеющее соответствующие гнезда дляего размещения. На каждом рабочеминструменте закреплен стакан 2 описываемого устройства. Хвостовик 1 устройства закрепляется на конечномзвене манипулятора. На фиг. 1-4 показано устройство в состыкованном положении. Для замены инструмента рабочийорган манипулятора подводится к магазинному устройству и опускается в соответствующее гнездо. При этом нарукоятку защелки 6 воздействует упор,жестко закрепленный в магазинномустройстве. Защелки 5 и 6 раскрываются, толкатель...
Звено механической руки манипулятора

Номер патента: 1583290
Опубликовано: 07.08.1990
МПК: B25J 18/00
Метки: звено, манипулятора, механической, руки
...механической руки манипулято 45ра работает следующим образом,Привод создает крутящий момент Ри короткий основной рычаг 3 (б) поворачивается и перемещает дополнительный шарнир 9, соединяющий" два дополнительных рычага 7 и 8. Движение зве- эц на механической руки манипулятора осуществляется по линии, определяемой прорезью 2 копира 1.В данном варианте копира 1 основное рабочее время дополнительного шарнира 9 движется по прямолинейной части копира, что при условии симметричного расположения основных рычагов обеспечивает прямолинейное движение основного шарнира, соединяющего длинные основные рычаги 4 и 5. При необхо" димости переориентации, например для смены захвата, движение дополнительного шарнира 9 происходит по криволинейной части...
Рука манипулятора

Номер патента: 1585142
Опубликовано: 15.08.1990
Автор: Чебоксаров
МПК: B25J 9/06
Метки: манипулятора, рука
...углов поворота и снижения массы и упругих характеристик звеньевуки манипулятора.,На чертеже показана принципиаль.ная кинематическая схема руки манипутятора.Рука манипулятора содержит шарнирно соединенные звенья 1-3, захватноеустройство 4 и приводы поворота звеНьев, выполненные в виде стационарйой части (не показано), установленной на стойке манипулятора, тяговыхэлементов 5-7, концы которых соединены с осями шарниров соответственнозвеньев 2-4, тяговых элементов 8 и 9,Охватывающих барабан поворота зах, ватного:,устройства 4 вокруг.продоль-.ной оси, и блоков-12 свободно враЩающихся роликов, расположенных наОсях шарниров соответственно звеньев1-3 и сгибаемых тяговыми элементами" 5-8. Рука также содержит датчики 13,15 углов поворота звеньев,...
Модуль резонансного манипулятора

Номер патента: 1585143
Опубликовано: 15.08.1990
Авторы: Духанин, Семеноженков
МПК: B25J 9/08
Метки: манипулятора, модуль, резонансного
...Фиксаторы 12 и 13 могут приводиться в движениеэлектромагнитами, линейными электродвИгателями и т.п. (не показаны).На валу 9 кривошипа 8 закреплен оди конец спиральной пружины 14, дрязгой конец которой через червячное колесо 15 и червяк 16 связан с двигателем 17.Звено 3 может быть связано с исполнительным механизмом робота или имФть схват.Устройство работает следующим образом.45Исходным положением устройства являтся положение выстоя, когда звено 3:1 анимает, например, крайнее левое положение и своим упором 4 максимально сжимает пружину 6. Оси шатуна 7 и крйвошипа 8 примерно совпадают, при этом система зафиксирована в положении неустойчивого равновесия Фиксатором 12. Двигатель 17 включен и заводт спиральную пружину 14, Во избежуание...
Схват манипулятора

Номер патента: 1585146
Опубликовано: 15.08.1990
МПК: B25J 15/00
Метки: манипулятора, схват
...(положение 11 на фиг.2),Для зажима и переноса детали 14силовому цилиндру 3 подается командана опускание корпуса 5. При Опускании корпуса 5 последний самоустанавливающейся плитой 15 прижимает деталь14 к базовым элементам приспособления, а подпружиненные клинья 16 входят в контакт с внутренней поверхностью детали 14, не. смещая ее в горизонтальной плоскости,В этом положении 1 корпуса 5 срабатывает конечный выключатель (непоказан), дающий команду цилиндрам 7на зажим детали 14. При этом зажимные рычаги 6 сводятся и осуществляют зажим детали 14, которая сохраняет свое ориентированное положение даже если рычаги 6 сводятся неодновременно, так как усилие цилиндра 3, передаваемое через плиту 15, и боковые поверхности клиньев 16 препятст"вуют...
Схват манипулятора

Номер патента: 1585147
Опубликовано: 15.08.1990
МПК: B25J 15/00
Метки: манипулятора, схват
...Л,Олийнык Корректор А.Осаулекко Редактор Н.Горват Заказ 2295 Тираж 683 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 101 На чертеже представлен схват мани пулятора.Схват манипулятора содержит корпус1, губки 2, в которых размещены подпружиненные поршни 3 со стержнями 4, , а также плунжеры 5. Кроме того, в 15 губках 2 выполнены полости 6, заполненные рабочей жидкостью и соединенные магистралью 7 между собой, а каналами 8 и 9 - соответетвенно с плун,;жерными полостями 10 и отверстиями 11,20в которых размещены поршни 3. Полости 6 дополнительно снабжены канала,ми 12 управления...
Схват манипулятора

Номер патента: 1585149
Опубликовано: 15.08.1990
Авторы: Глинкин, Леонтьев, Муранов
МПК: B25J 15/06
Метки: манипулятора, схват
...выполнения коль цевых проточек, взаимодействующих с буртами 6 пальцев 4, различной глубины (фиг,2, второй палец). При этом пружины 5 также будут различны по длине,Схват работает следующим образом.При перемещении схвата с помощью руки манипулятора (рука и манипулятор не показаны) и включенном источнике вакуума (источник вакуума не показан) в вакуумной камере 3 создается разрежение. При этом шариковые обратные клапаны 16 за счет разницы атмосферного давления в каналах 11 и давления в вакуумной камере отсекают каналы 11 от источника вакуума. При этом все пальцы 4 находятся в исходном положении (фиг.1), Для захвата детали схват прижимается к ней. Присоски 12 и пальцы 4 занимают положения, заданные конфигурацией захватываемой детали. При...
Схват манипулятора в. г. вохмянина

Номер патента: 1590375
Опубликовано: 07.09.1990
Автор: Вохмянин
МПК: B25J 15/00
Метки: вохмянина, манипулятора, схват
...наб 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул. Гагарина, 101 Изобретение относится к машиностроению и может быть использовано в конструкциях исполнительных органов роботов -манипуляторов.Целью изобретения является расширение технологических воэможностей за счетобеспечения захвата деталей за внутреннюю или за внешнюю поверхность.На чертеже изображен схват манипулятора, общий вид,Схват манипулятора содержит кольцеобразный корпус 1, на котором размещенсердечник электромагнита, выполненный ввиде замкнутого торообразного эластично:го баллона 2, заполненного ферромагнитной жидкостью 3.На сердечнике расположена обмотка 4,которая образует как-бы катушки 5 индук тивности,Часть баллона 2 расположена с наружной.стороны...
Устройство для диагностирования механизма линейного перемещения манипулятора

Номер патента: 1590378
Опубликовано: 07.09.1990
Авторы: Заозерский, Лукьяненко, Миронович, Явленский
МПК: B25J 19/00, G01M 13/04
Метки: диагностирования, линейного, манипулятора, механизма, перемещения
...крутящего момента будет монотонно возрастать,МикроЭВМ 27 по программе производитвычисление разности 0 допускового и измеренного моментов и определяет монотонность изменения разности от величины перемещения (. В случае совместного присутствия этих признаков вырабатывается диагноз Перекос опор, который выводится в 15 30 35 40 45 50 коде на блок 26 регистрации. В том случае, когда при выдвижении на всю длину ( ползуна не будет зафиксировано превышение допускового уровня крутящего момента 0(0, микроЭВМ 27 вырабатывает диагноз Регулировка опор в норме, который фиксируется в блоке 26 регистрации. Затем микроЭВМ 27 формирует код управления на возврат ползуна 1 в начальное положение. Этот код поступает на блок 20 вывода информации, на первом...
Способ управления приводом резонансного манипулятора

Номер патента: 1593946
Опубликовано: 23.09.1990
Автор: Шипилов
МПК: B25J 9/00
Метки: манипулятора, приводом, резонансного
...веноудерживается фиксатором 5 в олцом цз крайних положений. Максимально леформированный упругий элемент 4 обладает запасом потенциальной энергии. Электродвигатель 2 обесточен. Для перевода звенав другое крайнее положение выводят из зацеплеция фиксатор 5. Под действием упругого элемента 4 начинается интенсивный разгон. На выходе датчика 3 скорости появляется напряжение (/, пропорциональное величине скорости звена 1, которое через усилитель 7 подается на якорную обмотку электродвигателя 2. На выходном валу электролвигателя 2 создается момент, пропорциональный скорости движения звена 1, который способствует движению звена. Посл прохода положения устойчивого равное сия лвижецие ведомого звена 1 начинает замелляться упругим элементом 4....
Захват манипулятора

Номер патента: 1593950
Опубликовано: 23.09.1990
Авторы: Бостан, Бурдужа, Дулгеру, Оборок, Петьков
МПК: B25J 15/00
Метки: захват, манипулятора
...возможностей путем обеспечениясхвата деталей различных габаритов.На фиг. 1 изображен захват манипулятора; на фиг. 2 - разрез А - А на фиг. 1;на фиг. 3 - вид Б на фиг, 1.Захват манипулятора включает корпус 1, 10в котором закреплены на осях 2 губки 3,подпружиненные пружинами 4. Один конецсхватов охватывает по дуге ведомый вал 5прецессионного редуктора 6, который содержит сателлитное колесо 7 с зубьями,выполненными в виде конических роликов 8,связанное с корпусом 1 посредством сферических пальцев 9, размещенных в синусныхканавках 10, выполненных на внутреннейповерхности корпуса 1, Сателлитное колесо 7установлено на кривошипе 11 ведущего вала 12, связанного с валом электродвигателя 13, и зацепляется с ведомым зубчатым колесом...
Привод ориентации схвата манипулятора

Номер патента: 1593952
Опубликовано: 23.09.1990
МПК: B25J 15/00, B25J 9/00
Метки: манипулятора, ориентации, привод, схвата
...установленным соосно с помощью двух радиально-упорных подшипников на приводной вал 1, при этом гайка 23 винтовой передачи посредством закрепленной в ней скользящей втулки 24 и скалки 25 связана с корпусом 26, а с помощью двустороннего упорного подшипника и двух тяг 27 и 28 соединена с зубчатыми рейками 29 и 30, находящимися в зацеплении с зубчатыми колесами 3 и 32, которые, в свою очередь, соединены с кистью 33. Тяги 27 и 28 и зубчатые рейки 29 и 30 заключены в направляющие и подняты отно. сительно оси 00 на величину, равную радиусу зубчатых колес 31 и 32. Две параллельно расположенные зубчато-реечные передачи применены для предотвращения перекосов гайки 23.Механизм вращения запястья состоит из приводного вала 34 с цилиндрическим...
Схват манипулятора

Номер патента: 1593955
Опубликовано: 23.09.1990
Авторы: Мозговой, Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 15/06
Метки: манипулятора, схват
...Рау щская наб., л. 4511 роизвлстнсино-издатльский комбинат Патент, г. Ужгород, ул. Гагарина, 101 Изобретение относится к машиностроению и может быть использовано в захватных устройствах промышленных роботов.Целью изобретения является расширение технологических возможностей за счет обеспечения захвата деталей без их предварительной ориентации.На фиг. 1 показана конструкция схвата манипулятора; на фиг 2 - сечение А - А на фиг. 1.Схват манипулятора содержит полый цилиндрический корпус 1, выполненный из немагнитного материала, электромагнит 2, кольцевую цилиндрическую оболочку 3, установленную по боковой поверхности электромагнита 2. Полость между оболочкой 3 и электромагнитом 2 связана с источником сжатого воздуха (не показан). При этом на...
Головка манипулятора

Номер патента: 1600621
Опубликовано: 15.10.1990
Автор: Эрнст
МПК: B25J 17/00
Метки: головка, манипулятора
...3 вокругоси 7 на 180 приводит к перемещению.части 3 головками на угол 2 с.Если поворачивать головку в показанном на фиг.2 положении вокруг оси4 на 180 (фиг.З), то часть 3 головкиотносительно изображенного на фиг2положения занимает положение в зеркальном отображении, Ось 7 ни в какомположении не расположена коаксиальнок оси 4, так как в каждом случаеточка 9 пересечения осей 5 и 7 находится по круговой траектории вокругоси 4, Кроме того, конструкция головки согласно фиг.1 обеспечивает и дру"гие возможности ее поворота. При повороте части 2 головки вокруг оси 5(фиг.4) получают угловое положение,соответствующее угловому положениюсогласно фиг.З, без необходимости разворота части 1, В показанном на фиг.4положении часть 3 головки можно...
Механизм поворота стрелы манипулятора

Номер патента: 1601369
Опубликовано: 23.10.1990
Авторы: Архипов, Елкин, Скуров, Шилов
МПК: E21C 27/24
Метки: манипулятора, механизм, поворота, стрелы
...манипулятора включает корпус 1, которым может быть, например, стрела 2 проходческого комбайна, гидроцилиндр 3 поворота, одним концом шарнирно зак репленный на корпусе 1, другой конец которого шарнирно закреплен на рычаге 4, жестко закрепленном на поворотной части 5., дополнительный гидроцилиндр 6 поворота, первый конец которого шарнирно закреплен на корпусе манипулятора 7, второй на дополнительном рычаге 8, жестко закрепленном на поворотной части 5. Корпус манипулятора 7 установлен со смещени 30 ем, с воэможностью поворота на поворотной части 5. Продольная ось 9 дополнительного рычага 8 перпендикулярна продольнойоси 10 рычага 4. На корпусе манипулятора 7 возможна установка, например, бурильной маши 35 ны 11,Механизм работает следующим...
Двухпозиционное захватное устройство манипулятора

Номер патента: 1602736
Опубликовано: 30.10.1990
МПК: B25J 15/00
Метки: двухпозиционное, захватное, манипулятора
...14. Каждый из зажимных рычагов 8 и 9 снабжен хвостовиком 15 с зубчатой рейкой, между которыми размещено зубчатое колесо 16, причем один из рычагов 8 и 9 в каждой паре снабжен пальцем 17, размещенным в пазах 14 и шарнирно соединенным с рычагом 10. На торцовых. стенках корпуса 1 закреплены упоры 18, а на боковой стенке закреплено колесо 19, кинематически связанное с приводом 5. На конусе приводного элемента 6 закреплен кулачок 20.Устройство работает следующим образом.Один из захватов, например 3, опускается, получая движение от элемента 6. Одновременно с осевым перемещением элемент 6 поворачивается, и кулачок 20 через рычаг 10 разводит обе пары зажимных рычагов 8 и 9 на одинаковую величину. В конце хода захвата 3 элемент 6 получает...
Исполнительное устройство манипулятора

Номер патента: 1604598
Опубликовано: 07.11.1990
Авторы: Мозговой, Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 1/02, B25J 18/00
Метки: исполнительное, манипулятора
...Третье звено снабженокривошипом 4 и шатуном 5, расположенными идентично первому звену. Функции коромысла в этом механизме выполняетчетвертое звено и т.д. до последнего звена,несущего исполнительный орган. Кривошип4 каждого последующего механизма с каждой стороны шарнирно связан с шатуном б,,противоположный конец которого шарнирно установлен на последующем звене 2, скоторым связан кривошип 4 предыдущегокривошипно-шатунного механизма.Устройство работает следующим образом.В исходном положении звенья 2 сведены до контакта боковыми гранями пластин,Для изгиба устройства в плоскости пластинв одном иэ двух возможных направленийпроисходит поворот одним из двигателейсоответствующего кривошипа 4 по часовойстрелке. При этом звено 2,...
Схват манипулятора

Номер патента: 1604605
Опубликовано: 07.11.1990
Авторы: Бомко, Коноплянко, Ручка, Селиванов
МПК: B25J 15/00
Метки: манипулятора, схват
...магниты 5, на штоке 4 установлены постоянные магниты 6-8. Деталь 9, подаваемая плунжером 15 10, сопрягается с отверстием 11 детали 12.Схват манипулятора работает следующим образом.В исходном положении шток 4 находится в верхнем положении. После того как 20 плунжер 10 подал иэ накопителя деталь 9 на рабочую позицию, начинается движение штока 4 вниз. Движение штока 4 относительно основания 1 и взаимодействие постоянных магнитов 5 и 6 вызывает 25 раздвижку рычагов 2. Далее шток 4 продолжает перемещаться относительно основания 1, которое начинает двигаться вниз. В результате взаимодействия постоянных30 магнитов 5 и 7 рычаги 2 сдвигаются и захватывают деталь 9. Одновременно плунжер 10 убирается на исходную позицию. Основание 1 продолжает...
Захват манипулятора

Номер патента: 1604607
Опубликовано: 07.11.1990
МПК: B25J 15/00
Метки: захват, манипулятора
...губок, выполненный в виирного элемента 8, Губки 1 и 2 эакрепна подвижной относительно штанги3. При взаимодействии копирного нта 8 с профильными поверхностями к происходит раскрытие губок 1 и 2, тор 5, копирный элемент 8 и втулка 3 ложены коаксиэльно, 1 ил профильную поверхность 9, с помощью которой происходит раскрытие губок 1 и 2 при взаимодействии с копирным элементом 8 в момент разгрузки изделия 10. Втулка 3 в крайних положениях зафиксирована (не показано).Захват работает следующим образом.При подаче изделия 10 фиксатор 5 начинает перемещаться по профильной поверх- . ности губок 1 и 2 до тех пор, пока не западет в ступенчатую полость 4, В результате губки 1 и 2 зажимают изделие 10. При дальнейшей подаче изделия 10 в том же...
Механическая рука манипулятора

Номер патента: 1604608
Опубликовано: 07.11.1990
МПК: B25J 18/00
Метки: манипулятора, механическая, рука
...Ж, Раушская наб 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 Изобретение относится к механизации погрузочно-разгрузочных работ.Цель изобретения - расширение функциональных возможностей руки манипулятора за счет увеличения рабочей зоны и 5 повышения надежности.На чертеже представлена схема механической руки манипулятора.Механическая рука состоит из корпуса 1, в котором установлена с воэможностью 10 возвратно-поступательного перемещения выдвижная секция 2, шарнирно соединенная с основным рычагом 3, несущим рабочий орган (не показан). Выдвижная секция 2 и основной рычаг 3 соединены между собой 15 дополнительным рычагом 4 С-образной формы, шарнирно связанным с промежуточным элементом, например рычагом 5,...
Задающее устройство манипулятора

Номер патента: 1606271
Опубликовано: 15.11.1990
Авторы: Виногоров, Иванов, Кротов, Марков, Никаноров
МПК: B25J 13/02
Метки: задающее, манипулятора
...4 закреплена рукоятка, выполненнаяв виде шарнирно соединенных двуплечихрычагов 5 и 6, имеющих соосно расположенные отверстия 7 и 8 на одних плечах,образующие гнездо шарового шарнира 4.Задающее устройство снабжено системойблокировки, включающей концевой выключатель 9 и реле 10, контакты котороговключены в цепи питания муфт 2 звеньев 1.Причем выключатель 9 закреплен на другомплече рычага 6 рукоятки с возможностьюзамыкания электрической цепи муфты 2при сведении рычагов 5 и 6. Для этогона рычаге 6 закреплена пружина 11,взаимодействующая при сведении рычагов 5 30и 6 с толкателем выключателя 9 и отжимающая рычаги 5 и 6 друг от другапри их разведении. Рукоятка может бытьснабжена пружинной защелкой 12, фиксирующей рычаги 5 и 6 в сведенном...
Гидропривод сбалансированного манипулятора

Номер патента: 1611727
Опубликовано: 07.12.1990
Авторы: Кравцов, Сафарян, Солодников, Чечельницкий, Шатилов
МПК: B25J 1/06, F16B 15/00
Метки: гидропривод, манипулятора, сбалансированного
...24 и давлением нагнетанияв его полости 23. Распределитель 19переключится вправо, его вход соединяется с напорной линией 6 насосной станции 8, жидкость из штоковойполости 3 гидроцилиндра 1 поступаетпо возвратной линии 7 в напорную линию 6, В то же время жидкость отнасоса 10 подается в гидросистему,одновременно в аккумулятор 12 Придостижении. определенного давленияФобусловленного настройкой датчиков14 давления, насос 10 отключается,а в систему подается жидкость отаккумулятора 12,Для опускания груза С распределители 5, 21 включаются в положение оЖидкость из напорной гидролинии 6поступает в штоковую полость 2 гидроцилиндра 1 Жидкость, вытесняемаяиз поршневой полости гидроцилиндра 1,поступает аналогично циклу подъемагидроцилиндра 1 в...
Модуль резонансного манипулятора

Номер патента: 1611730
Опубликовано: 07.12.1990
Авторы: Духанин, Семеноженков
МПК: B25J 9/00
Метки: манипулятора, модуль, резонансного
...14 управления.В данной конструкции электродви 50гатель 13 и рычажный механизм, вклю-чающий шатун 10 и кривошип 11, выполняют функции перемещения выходного звена и его фиксации,Привод работает следующим образом,Исходным роложением для нормального Функционирования привода является положение, при котором выходноезвено б находится в одном из крайни положений, упор 7 Выходного звена 6максимально сжимает упругий элемент9, Оси звена 6, шатуна 10 и кривошипа 11 совпадают, при этом системазанимает одно из своих положенийнеустойчивого равновесия, а кривошип 11 опирается на упор 15,Для начала движения по команде ссистемы 14 управления двигатель 13начинает поворачивать валом 12 кривошип 11 по часовой стрелке, Система,таким образом, выводится из...
Схват манипулятора

Номер патента: 1611732
Опубликовано: 07.12.1990
МПК: B25J 15/00
Метки: манипулятора, схват
...зажатия детали включают гидроцилиндр, Шток гидроцилиндра 12 приводит в движение клин .10 с закрепленным на нем хомутом 11. Движениеклина 10 осуществляется по направляющим колонкам 13, При этом ось 7, жестко связанная с клином 10 при помощи хомута 11, также приводится в движение, Вместе с осью 7 приводится вдвижение пружина 15 установленная наоси 7, зубчатая рейка 8, подвижно ,25 закрепленная на оси 7. Рейка 8, находящаяся в зацеплениис шестернями 9, при своем движении приводит в дви -жение шестерни 9, При этом приводятсяв движение и шестерни 6, находящиеся в зацеплении с шестернями 9, Шестерни 6, связанные при помощи штифтов 5 с захватными рычагами 3, приводят, в движение захватные рычаги 3. Последние сводятся, охватывая поверхность...
Очувствленный схват манипулятора

Номер патента: 1611733
Опубликовано: 07.12.1990
МПК: B25J 15/00, B25J 19/04
Метки: манипулятора, очувствленный, схват
...и приемником света, а еслидеталь отсутствует, то поток светаот источника попадает на приемник,Таким образом, по сигналам приемникаможно судить о наличии детали в схвате. 2 з,п. ф-лы, 3 ил. также на нерабочей стороне другойгубки 2,Для повышения помехоустойчивостипри работе датчика наличия детали источник 4 света выполняется хроматическим, а приемник 5 света снабжается соответствующим хроматическим светофильтром.Губки 2 или одна из них такжемогут быть выполнены хроматическимис той же характеристикой пропускания,что и у светофильтра приемника 5света,Схват работает следующим образом,После зажатия губками 2 детали бпоток светя от источника 4 под углом с, пройдя через губку 2, достигает поверхности зажатой детали 6,частью поглощаясь и...
Сферический шарнир манипулятора

Номер патента: 1611734
Опубликовано: 07.12.1990
Авторы: Мозговой, Новичихин, Павловец, Плюгачев, Хутский
МПК: B25J 17/00
Метки: манипулятора, сферический, шарнир
...свободно-поршневой,двигатель, пнев 50матический вибратор, Фиксирующий стержень 17 годпружинен и может перемещаться в пазу 18 под действием электромагнитного поля обмотки 19, связанной со своим источником питания.55Шарнир работает следующим образом, Стержень 17 под действием поданного на обмотку 9 постоянного напряжения отходит от части 2 шарнира,происходит расфиксацкя частей 1 к 2,Диск 9 поворачивается под действиемэлектромагнитных полей катушек 13 намагниты 12 до требуемого положения сшагом, равным угловому расстоянию,.между осями соседних катушек 13. Приэтом импульсы напряжения, поочередно подаваемые на катушки 13, расположенные вблизи от магнитов 12, на шаг перемещают диск 9 в нужном направлении. Требуемое положение диска 9 и...