B25J 11/00 — Манипуляторы, не отнесенные к другим рубрикам
Манипулятор

Номер патента: 1481055
Опубликовано: 23.05.1989
Автор: Гущин
МПК: B25J 11/00, B25J 9/00
Метки: манипулятор
...2 через звено 4, связано с приводом 8, расположенным на основании 5. Число зубьев у зубчатого колеса 3 изготовлено в два раза меньшим, чем число зубьев у зубчатого колеса 7, Звено 1 снабжено противовесом 9 для уравновешивания сил тяжести звеньев механизма пантографа. Передаточное отношение зубчатой передачи, составленной из подвижного звена 1, зубчатого колеса 3 и заторможенного зубчатого колеса 7, равно- 1 - 1 - 7где Ц, - передаточное отношение;У- углы поворота звеньеви 2 соответственно; град;7., - число зубьев зубчатого колеса 3; Е, - число зубьев зубчатого колеса 7.Если зубчатое колесо 7 не заторможено, то зубчатая передача становится дифференциальным зубчатым механизмом, предназначенным для сложения движений от приводов 6 и 8. 5 О 5...
Промышленный робот

Номер патента: 1481056
Опубликовано: 23.05.1989
Автор: Смирнов
МПК: B25J 11/00
Метки: промышленный, робот
...рук 4 имеет кисть 26 с рабочим органом 27, например сварочными клещами, и как минимум две степени подвижности.Система 6 подвода рабочей среды включает блок 28 подготовки рабочей среды,5 10 15 20 25 30 35 40 45 50 55 шланг 29, блок 30 регулирования давления, который посредством шланга 29 соединен с блоком 28 подготовки рабочей среды и посредством шланга 31 и штуцера 32 с герметичной полостью кольца 7. Далее рабочая среда поступает через штуцеры ЗЗ, шланги 34 и каналы, выполненные в корпусах механических рук 4, к силовым цилиндрам рабочих органов 27. Внутри несущей балкиразмещена свариваемая деталь, например кузов 35, установленный на позиционере 36, который размещен в траншее 11,Промышленный робот работает следующим образом.На...
Промышленный робот

Номер патента: 1481057
Опубликовано: 23.05.1989
Автор: Смирнов
МПК: B25J 11/00
Метки: промышленный, робот
...49 волнового редуктора 46 посредством подшипников 50.Механизм фиксации обрабатываемой детали установлен на раме 40 и выполнен в виде силовых цилиндров 51, на штоках 52 которых установлены прихваты 53.Промышленный робот работает следующим образом.При перемещении механических рук 6 в вертикальной плоскости от системы 7 управления поступает сигнал на двигатель 12, который начинает работать, вращается ведущий шкив 13 и через зубчатый ремень вращает ведомый шкив 14 и промежуточный вал 15 с ведущими колесами конических передач 16. Ведущие колеса приводят в действие ведомые колеса конических передач и винты 17, Винты 17 вращаются и через гайки 19 воздействуют на дополнительные каретки 2, которые начинают перемещаться вверх или вниз в...
Способ контроля точности контурных перемещений робота и устройство для его осуществления

Номер патента: 1481060
Опубликовано: 23.05.1989
МПК: B25J 11/00, B25J 19/00
Метки: контурных, перемещений, робота, точности
...повышения точности измеренийоси датчиков 5 и 6 и центр сферического шарнира 14 пересекаются в одной точке . Способ осуществляется следующим . образом,Рабочий орган (фланец) 1 робота 2 скрепляют с фланцем 3 измерительной головки 4, Программируют робот в опорных точках контролируемой траектории с расстопоренной измерительной головкой. Запоминают при этом показания датчиков 5 и 6 измерительной головки 4 и датчика 7 положения измерительной головки на эталонной кривой (прямой) 8, По показаниям датчиков 5-7 вычисляют положение запрограммированной траектории относительно эталонной, Затем при исполнении заданного движения в автоматическом цикле по регистрируемым измерительной головкой рассогласованиям исполненной траектории относительно...
Манипулятор

Номер патента: 1491694
Опубликовано: 07.07.1989
Авторы: Голованов, Орлов, Салтанов
МПК: B25J 11/00
Метки: манипулятор
...повторяется. 4 ил.149694воздуха в правую полость цилиндра 3. Шток выдвигается и поворачивает пневмоцилиндр 2 с исполнительным органом 20 (фиг, 4, движение 11). Регулируемый упор 15 воздействует на конечный выключатель 17.который дает сигнал ложементам 6 на зажим груза, если груз передается на станок или на воздухораспределитель 18, который подает воздух в верхнюю полость цилиндра 2. Его шток опускается и груз укладывается на ложементы другого транспортера (фиг. 4, движение 111). В случае подачи груза на станок сигнал на воздухораспределитель 18 подается после зажима детали на станке (фиг. 1). Регулируемый упор 10 воздействует на конечный выключатель2, который дает сигнал на воздухораспределитель 19. Воздухораспределитель9 подает...
Транспортно-ориентирующий манипулятор мухина

Номер патента: 1491695
Опубликовано: 07.07.1989
Автор: Мухин
МПК: B25J 11/00
Метки: манипулятор, мухина, транспортно-ориентирующий
...На втором конце вилки смонтирован привод 3, вал котороо связан с вилкой. Вал 14 привода 15 жестко соединен с вилкой в верхней ее части и образует, таким образом, шарнирное соединение этой вилки с тележкой 16, имеющей возможность перемещения по моно. рельсу 17. На раме выполнены отверстия8 с датчиками 19. На основании шарнирно установлен рычаг 20 с расположенными на нем конусными штырями 21 (ловителями) и зажимами 22, предназначенными для стыковки и фиксации рамы 1. Манипулятор работает следующим образом.Перед началом работы объект 2 закрепляется на раме 1. Установкой противовеса 6 добиваются расположения центра масс об ьекта на пересечении горизонтальных и вертикальной осей поворота выходного звена 5.Для обеспечения требуемой ориентации...
Привод рабочего органа манипулятора

Номер патента: 1491696
Опубликовано: 07.07.1989
Авторы: Барабадзе, Беклемышева, Веремеевич, Кашакашвили, Мачарадзе, Миленный, Назадзе, Полухин
МПК: B25J 11/00, F16H 35/00
Метки: манипулятора, органа, привод, рабочего
...с ней посредством резьбы поворотным барабаном 23. На внешней его стороне установлен зубчатый сектор 24, входяший н зацепление с зубчатым колесом 25 двигателя 26, закрепленного на корпусе 27 устройстна.Привод работает следующим образом.Мощность от мотора-редуктора 1 через ведущий нал 2 и центральное зубчатое образует резьбовую кинематическую пару со втулкой 22, расположенной между ним и траверсами на опорах 19 качения, и по ее резьбе смещается относите,пьно траверс 20. За счет этого смещения изменяются тормозные моменты на водиле 8 и колесе 11.5 ил. колесо 4 передается сателлитам Ь, от которых часть мощности передается на водило 8, а часть - через центральное зубчатое колесо 11 ведомому валу 12 привода.При неподвижном водиле 8 имеет...
Манипулятор

Номер патента: 1491697
Опубликовано: 07.07.1989
Автор: Куренков
МПК: B25J 11/00
Метки: манипулятор
...поршневого поворотного иневмодвигателя 7 на угол 180 Цилиндрические направляющие 5 за. прессованы в плите 8, закрепленной на корпусе пневмодвигателя 7, жестко связанного с основанием 1.Шатуны 3 шарнирно установлены одними концами на криеошипе 2, а другими на каретках 4. Разница их установки относительно нижней плоскости кривошипа 2 по высоте определяется цилиндрическими пальцами 9 - 12, высота которых увеличивается, например, в направлении против часовой стрелки.Высота данных пальцев возрастает соответственно на такую величину, которая исключает столкновение шатунов при пересечении их траекторий, с этой же целью на шатуне 13 предусмотрено Г 1-образное соединение 4.П-образное соединение 4 предназначено для того, чтобы ири повороте...
Уравновешенный манипулятор

Номер патента: 1491698
Опубликовано: 07.07.1989
МПК: B25J 11/00
Метки: манипулятор, уравновешенный
...которой равно К/(Кг), где К - радиус начальной окружности шестерни 11, г - радиус барабана.Манипулятор работает следующим образом.В крайнем верхнем положении колонны 2 пружина 7 имеет начальную деформацию уч ц развивает усилие Г= =Су, где С - жесткость пружины. Для полного уравновешивания руки робога в этом положении к колесу 11 необходимо приложить дополнительный момент, компецсируктщцй момент неуравновешенности. При смещении руки вниз на величину х деформация пружины возрастает на величину 1 у=х (К - г) /К, при этом момент неуравновешенности меняется. Его величина определяет условия равновесия для системы сил, представленных на фиг. 4 и 5, где Р - вес вертикально перемещающихся частей руки робота, Г - усилие пружины, 8 окружное...
Манипулятор

Номер патента: 1493457
Опубликовано: 15.07.1989
Авторы: Быков, Кичаев, Мартовицкий, Стебницкий, Трубачев, Федерякин
МПК: B25J 11/00, B25J 9/00
Метки: манипулятор
...8, 9, 10 и перемещаются поступательно от дополнительных приводов 17, 18, 19. Установленные на каждом звене схваты 11, 12, 13 поворачиваются вокруг своих звеньев 2, 3, 4 от приводов 4, 15, 16. Любой из схватов 11, 12, 13 может взять и переместить объект 21 манипулирования или зафиксироваться на выдвижной опоре 20. 2 ил. оси предшествующего звена. На основанииманипулятора установлены выдвижные опоры 20 для фиксации на них схватов 11, 12 и 13 (на фиг. 1 показана одна опора 20, на которой зафиксирован схват 12). Для примера в схвате 13 показан объект 21 манипулирования.Манипулятор работает следующим образом.Исполнительные звенья 2, 3 и 4 поворачиваются на основании 1 и относительно друг друга от приводов 9, 8 и 10 и перемещаются...
Lкоординатный манипулятор

Номер патента: 1495111
Опубликовано: 23.07.1989
Авторы: Григорьев, Ивашов, Колискор, Некрасов, Степанчиков
МПК: B25J 11/00, B25J 9/00
Метки: lкоординатный, манипулятор
...элементом 9.На фланце установлено исполнительноеустройство 14,В качестве принодных элементов3 - 8 линейного перемещения можноцсполь- цать пненмоцилиндры или винтовые п редачи с электродвигателями,Конкретное исполнение приводных элементов , - 8 на фиг, 1 не показано.С це.ью обеспечения высокотемпературного прогрева (при установкен сверхнысоковакуумном оборудовании)флацец 2 манипулятора с элементами3 - 8 может отсоединяться от основания манипулятора (фиг. 3).Манипулятор работает следующимобразом.При цзмецсцци длин приводных элементов 3 - Я линейного перемещенияисполнительное устройство на фланцесоцершает днцжецце по шести координатам - тром линейным и трем угловым относительно неподвижного основацця 1, с ф.цронаццая трубя 10...
Устройство для контроля геометрических параметров манипулятора

Номер патента: 1495112
Опубликовано: 23.07.1989
Авторы: Болотин, Гордиенко, Зиндер, Табачник, Федосеенков
МПК: B25J 11/00, B25J 19/00
Метки: геометрических, манипулятора, параметров
...шарнирами звенья 2 - 4 (оси 20шарнирон параллельны),а также фланец 5, содержит основание б с базовой поверхностью 7 для установкиманипулятора 1 и измерительный элемент, выполненный в виде прямолинейной направляющей 8, установленной наповерхности 7, и калиброванной скобы 9, установленной на фланце 5 конечного звена манипулятора,Манипулятор 1 установлен на базоной поверхности 7 основания 6так, что оси шарнирон перпендикулярны продольным осям прямолинейной направляющей 8 и скобы 9,Контроль геометрических параметрон манипулятора, н частности величины смещения оси конечного звена с фланцем 5 относительно оси первого звена 2, осуществляется следующим образом. 40На Сазовой поверхности 7 основали 6 закрепляют манипулятор 1, Выводят...
Манипулятор

Номер патента: 1495113
Опубликовано: 23.07.1989
Автор: Литвиненко
МПК: B25J 11/00
Метки: манипулятор
...3 - привод, разрез; на Фиг. 4 - вид Б на фиг. 3,Манипулятор содержит корпус 1 прямоугольной формы, крепежные петли 2, приводы 3, в зазоре неподвижных частей которых располагаются подвижные части, например Ферромагнитные 20 пластины 4. При этом пластины 4 с по мощью тросов 5 и петель 2 крепятся к руке Ь, которая через тросы 5 и пластины 4 подвешена на пружинах 7, Рука 6 имеет укрепленный на одном 25 конце привод 8 схвата 9 с губками 10, установленный на другом конце этой руки. Схват соединен с приводом тягой, которая проходит внутри ру" ки 6. Корпус манипулятор укреплен на 30 основании 11, Неподвижные части приводов 3 содержат две пары полюсов 12, расположенных один напротив другого, на которых установлены катушки 13. Пластины 4...
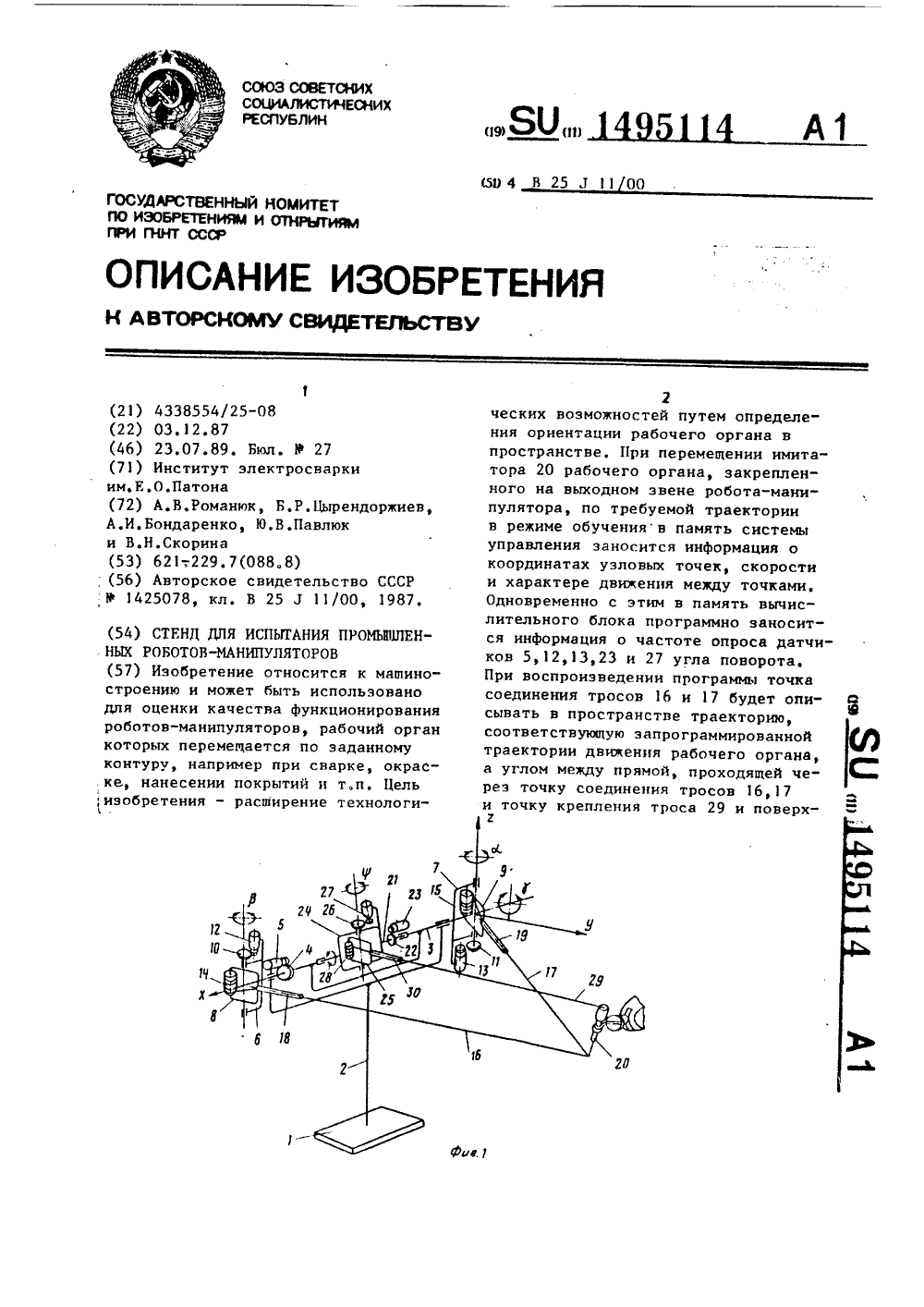
Стенд для испытания промышленных роботов-манипуляторов
Номер патента: 1495114
Опубликовано: 23.07.1989
Авторы: Бондаренко, Павлюк, Романюк, Скорина, Цырендоржиев
МПК: B25J 11/00
Метки: испытания, промышленных, роботов-манипуляторов, стенд
...относительно запрограммированной траектории, Подпружиненные барабаны 14 и 15, соединенные с 40 тросами 16 и 17, и барабан 28, соединенный с тросом 29, вращаются соответствующим образом, обеспечиваяразмотку или намотку тросов 16, 17и 29.45 Поворот рамок 8,9 и 25 осуществляется так, чтобы обеспечиваласьсоосность тросов 16,17 и 29 и направляющих 18,19 и 30, На входе и выходе направляющих 18,19 и 30 уста,новлены рамки для улучшения условийпрохождения тросов по направляющим,обеспечения их соосности и исключения влияния изгибов тросов на показания датчиков 12,13 и 27. Одновременно с поворотом рамок 8,9 и 25через мультипликаторы 10, 11 и 26вращаются датчики 12,13 и 27, показания которых, соответствующие угламЫиповорота тросов 16,17...
Транспортный робот

Номер патента: 1495115
Опубликовано: 23.07.1989
Автор: Гвоздев
МПК: B25J 11/00, B25J 5/02
Метки: робот, транспортный
...10 робот, вид сверху; на фиг. 2 - разрез А-А на фиг. 1.Транспортный робот содержит две аналогичные продольные балки 1, на которых закреплены по два индивиду альных привода 2. На выходных валах приводов 2 закреплены опорные колеса 3. Робот перемещается по направляющим рельсам 4. К каждой продольной балке 1 крепится зубчатая рейка 20 5, а между рейками 5 расположено кинематически связанное с ними зубчатое колесо 6 суммирующего зубчато-реечного механизма. Рейки 5, балки 1 и планки 7 обеспечивают при заторможен ных приводах 2 геометрическую неизменяемость конструкции, К зубчатому колесу 6 крепится основание манипуляционного механизма 8 с захватом 9.Транспортный робот работает сле дующим образом,Если угловые скорости всех приводов 2...
Захватный комплекс

Номер патента: 1502294
Опубликовано: 23.08.1989
Авторы: Гончаренко, Есимбаев, Климов, Максимова, Пастушков
МПК: B25J 11/00, B25J 15/06
...предназначена для укладки на ней детали и имеет воэможность502294 хвата детали транспортными роликамиили рейками швейной машины снимается напряжение с электромагнитныхзахватных элементов, деталь высвобождается и в дальнейшем сходит с пластины из ферромагнитного материала. После полного схода детали с пластины вновь подается напряжение на электромагниты, пластина притягивается к ним и переносится на исходную позицию рядом с пачкой деталей, после чего снимается напряжение с электромагнитных захватных элементов, пластина иэ ферромагнитного материала отделяется, а захватный комплекс поднимается и позициснирует над пачкой деталей. В дальнейшем процесс повторяется.Формула изобретения Составитель Г. МаксимоваТехред М,Ходацич Корректор...
Манипулятор

Номер патента: 1502295
Опубликовано: 23.08.1989
Автор: Лифантьев
МПК: B25J 11/00
Метки: манипулятор
...15 - 17 (фиг.1).Манипулятор работает следующим образом.Транспортером 18 штучные элементы 19, например кирпичи, поступают к манипулятору. Впереди идущий штучный элемент 19 доходит до переключа теля 8 и путем нажатия на него выключает транспортер 18 и включает привод 6 подъема исполнительного ор" гана на опускание (фиг.2). Исполнительный орган .опускается, охватывает 45 захватными элементами штучные изделия. При дальнейшем опускании включается переключатель 9 для подачи воздуха в пневматические камеры захватных элементов 3. Пневматические камеры захватных элементов 3, разду- ваясь, зажимают охваченные штучные элементы 19. Продолжая раздуваться после захвата штучных элементов 19, одна из пневматических камер выходит из окошка и...
Промышленный робот

Номер патента: 1505774
Опубликовано: 07.09.1989
Авторы: Лагунов, Маркевич, Ройтман
МПК: B25J 11/00, B25J 5/02
Метки: промышленный, робот
...на выходной секции манипулятора. На каретке 12 жесткозакреплено захватное устройство8, выполненное в виде клещевого схвата автоматического действия, установленное с возможностью захвата груза в плоскости, 50перпендикулярной направлению движениятележки. Для определения момента раскрытия схвата на каретке 12 закреплен датчик 19, взаимодействующий с флажком 20,расположенным на подвижной части захватного устройства. Для остановки захватного устройства в крайнем верхнем положении на стойках 6 закреплен датчик 21.Путевой датчик 22 закреплен на монорельсе. Для контроля плоскости укладки груза на каретке 12 установлен датчик 23, взаимодействующий с флажком 24. Для остановки привода горизонтального перемещения и контроля уси пия прижатия ящиков...
Манипулятор

Номер патента: 1505775
Опубликовано: 07.09.1989
МПК: B25J 1/06, B25J 11/00
Метки: манипулятор
...соединенную сферическими шарнирами1. Коленчатый вал 9 установлен в опорах 2. ;убчатый сектор 13 жестко связан с колен 11 атым валом 9. С сектором 13 взаимодействует зубчатое колесо 14, с которым свяван схват 15. Рука манипулятора выполнена в виде стержневой призмы, в частности, параллелепипеда, образованного стержнями 16 равной длины, причем их длины равны длине тяги 1 О. В вершинах параллелепипеда установлены сферические шарниры 17. Для поворота стержневого параллелепипеда в горизонтальной плоскости используется привод 18, соединенный с кривошипом 19 изменяемой длины. Кривошип 19 через сферический шарнир 20 связан с универсальным шарниром 21, к которому присоединены вилки 22 и 23. Вилка 22 установлена с возможностью вращения в опоре...
Манипулятор

Номер патента: 1509245
Опубликовано: 23.09.1989
Автор: Полетучий
МПК: B25J 11/00
Метки: манипулятор
...Передаточное отношение всех ременных зубчатых передач равно единице, а подшипники, смонтированные на них шкивы, ремни имеют одинаковые параметры для всех ременных передач, что значительно упрощает и удешевляет конструкцию манипулятора.Манипулятор работает следующим образом.В исходном положении манипулятора, если он не нагружен полезной нагрузкой, его звенья удерживаются от перемещений с помоцью тормозов на постоянных магнитах, имеющихся в двигателях. При работе манипулятора все его шарниры могут Включать-, ся одновременно или два из них, или один независимо от остальных. Например, для поворота звена 2 относительно основания 1 на требуемый угол включается основной привод 6, вследствие чего получает вращение с частотой выходного вала...
Роботизированный технологический комплекс

Номер патента: 1511110
Опубликовано: 30.09.1989
Авторы: Андреев, Снеховский, Френкель
МПК: B25J 11/00
Метки: комплекс, роботизированный, технологический
...механизм 11 продольного перемещения в виде силового цилиндралинейного перемещения, закрепленногона выходном элементе 12 механизма 9 поворота, Исполнительное устройство имеет также клеть 13, содержащую силовой цилиндр 14 вращательного перемещения, корпус 15 которого закреплен на штоке 16, а также направляющую 17 механизма продольного перемещения и механизм 18 вертикального перемещения, силовой цилиндр 19 которого встроен в корпус 15. На рамочной. направляющей 20, соединенной со штоком 21 и скалкой 22, которая перемещается по роликам 23, закреплен с помощью кронштейна 24 рабочий орган 25 в виде магнитного патрона для удержания заготовки 26.Технологическое оборудование в виде прессов 27 размещено в рабочей зоне исполнительных устройств,...
Стенд-тренажер для оценки качества задания программы перемещений манипулятора

Номер патента: 1511111
Опубликовано: 30.09.1989
Автор: Бондаренко
МПК: B25J 11/00
Метки: задания, качества, манипулятора, оценки, перемещений, программы, стенд-тренажер
...триггер 13 управления.После этого проводится второй этап оценки качества программирования перемещений манипулятора разными операторами.Первоначально определяется величина ошибки позиционирования при установке имитатора 2 рабочего инструмента в заданную точку 24 за определенное время, Для этого путем выбора времени задержки с помощью элемента 16 задержки устанавливается продолжительность времени вывода конечного звена манипулятора 1 из исходной точки 23 в некоторую точку 24, Затем испытуемый оператор с помощью пульта 4 управляет процессом перемещения манипулятора: кратковременно нажимает и отпускает на пульте 4 кнопку 7 "Пуск", при этом скачок напряжения постоянного тока поступает на вход первого элемента 12 дифференцирования,...
Механизм уравновешивания манипулятора

Номер патента: 1511112
Опубликовано: 30.09.1989
МПК: B25J 1/02, B25J 11/00
Метки: манипулятора, механизм, уравновешивания
...1 расположена 40вертикально. При этом за счет предварительного,натяжения пружин 9 дополнительные роликовые цепи 3 и 4взаимодействуют с отклоняющими блоками 7 и 8, что препятствует самопроизвольному выходу звена 1 из нейтрального положения, При повороте звена1 под действием привода манипулятора(не показан) одна из дополнительныхроликовых цепей, например, 4 оказывается разгруженной, а другая - взаимодействует с зубьями зубчатогосектора 2, жестко закрепленного наповоротном звене, При горизонтальномрасположении поворотного звена 1 мо"мент, создаваемый усилием пружины,имеет максимальную величину. При перемещении манипулятора вверх величина момента от массы звена 1 с грузом изменяется по закону синусоиды. Для обеспечения высокой точности...
Манипулятор

Номер патента: 1511120
Опубликовано: 30.09.1989
МПК: B25J 11/00, B25J 17/00
Метки: манипулятор
...2 привода сателлитный блок 9 колес совершает прецессионное движение, зацепляясь при этом с одной стороны с неподвижным центральным колесом 12, а с другой - с двумя вращающимися колесами 14 и 15, При этом колесо 14 будет вращаться с редукциейЕл Е 1 е1.Е 1 Е 1 ь Еи Е 1 а колесо 15 - с редукциейЕ 11 Е юЕ тЕз Е лЕ 5где Е , 1- числа зубьев венцов 11и 13;Е; Е,- числа зубьев центральных колес 12, 14 и 15.Передаточные отношения 1, и примерно одинаковы по величине, однако имеют разные знаки, т.е. зубчатые колеса 14 и 15 вращаются в разные стороны.5151Вращательное движение колеса 14, связанного с дополнительным валом, при включении механизма 16 связи передается звену 4, которое поворачивается вокруг своей оси в одном направлении, а при...
Манипулятор

Номер патента: 1511122
Опубликовано: 30.09.1989
Авторы: Бузыцков, Вьюниченко, Чорный, Шелейко
МПК: B25J 11/00, B25J 21/00
Метки: манипулятор
...1 смонтированна одной из стенок камеры 2, в которую детали на очистку подаются на тележке 3. Манипулятор включает исполнительное устройство 4, выполненноев виде шпаги и установленное с возможностью перемещения во втулке 5шаровой опоры 6, которая смонтирована на основании 7, закрепленном накаркасе 8, выполненном в виде стакана с проемами, через которые пропущены наружные ветви гибких элементов (тросов) 9, на которых закрепленпротивовес 10, Гибкие элементы распасованы через, например, четыре гарыотклоняющих блоков 11 и закрепленына исполнительном устройстве прижимом 12. На исполнительном устройствесо стороны камеры закреплен сопловойаппарат 13, а с другой - штурвал 14для управления манипулятором.Манипулятор работает...
Манипулятор

Номер патента: 1516342
Опубликовано: 23.10.1989
МПК: B25J 11/00, B25J 5/02, B25J 9/00 ...
Метки: манипулятор
...по оси Х осуществляется в следующем порядке. Включают электромагнитные фиксаторы 17 и 23, в результате чего гибкий элемент 5 защемляется в корпусе каретки 4,. а поперечная штанга 3 стопорится относительно направляющих рамы 2, Движение каретки 4 по оси Х влево осуществляется от гибкого тягового органа при вращении приводных блоков 6 и 7 двигателей 18 и 19 в одну сторону против часовой стрелки. Движение по оси Х вправо происходит при одновременном вращении в одну сторону по часовой стрелке приводных блоков 6 и 7. Движение по оси г осуществляется в следующем порядке. Включают электромагнитные фиксаторы 17 и 23 и включают электромагнитный фиксатор 24, в результате чего каретка 4 стопорится на поперечной штанге 3. Движение по...
Схват микроманипулятора

Номер патента: 1516348
Опубликовано: 23.10.1989
Авторы: Бакай, Бансявичюс, Рагульскис, Скачковас, Улозас
МПК: B25J 11/00, B25J 15/02
Метки: микроманипулятора, схват
...эл 1 ис:имого перемещения рычагов 4 и 5.Схвдт микромлнипулятора работает следующим образом. При подаче от блоков питания (не показаны) питающего высокочастотного напряжения на электроды 11 и 14 иьезокердмической и;дстины 10 и электрод с другой стороны пластины 10 (ие показан) ироис.хс дят изгибные колебания пьезокерамической пластины 10, что способствует ис явлению в некоторых точках пласти ы 10 колебаний с эллипсоидальноц траекторией и разньцаэ направлениями смещения этих точек пластины: М. ста этих точек меняются, При переключении коммутатора (не показан), т.с . ири подаче питающего напряжения ид электроды 12 и 13, нлправлеиис- эих колебаний пластины мерычлгс н. Поэтому вращательное движение конца одного из рычагов, вызываемое...
Манипулятор портального типа

Номер патента: 1521578
Опубликовано: 15.11.1989
Автор: Черняк
МПК: B25J 11/00
Метки: манипулятор, портального, типа
...закреплен на основании 16, а канаты 8 ц 14 заправлены в полиспаст 18. При сходе с полиспаста 18 канат 14 закреплен на основании 16, а канат 8 заправлен на полиспаст 19 ц цри сходе с него крепится к основанию 16. Каждый из полиспастов 15, 17, 18 и 19 является двукратным, причем подвижцые блоки этих полиспастов объединены в группы, количество блоков в которых соответствует числу степеней подвижности, и кинематичсски соединены с соответствующими индивидуальными двигателями 20 - 23. Двигатели 20 23 кицематически связаны с датчиками 24 - 27 церемешений. Канаты 9, 1 ц 13 соединены с противовесами 28, 29 ц 30, уравцовепццак)шими каретки 1 и 2, доцолцц 1 лиц к каретку 3 механической руки и создаюшими предварительное натяжение канатов 9 -...
Уравновешенный манипулятор

Номер патента: 1521579
Опубликовано: 15.11.1989
Автор: Джавахян
МПК: B25J 1/06, B25J 11/00
Метки: манипулятор, уравновешенный
...6, и на конце 6 плеча 12 кулисы.Размеры мехацизма уравновешивания выбираются согласно равенствам СА=ВА= =РА=а, длина пружины в недеформируемом состоянии устанавливается равной длине СЕ плеча 12 кулисы. Равенство СА= - ВА обеспечивает постоянное передаточное отношение между входным звеном 6 механизма пацтогра 1 ра и кулисой 11, равное двум. Равенство ВА= - РА приводит к тому, что палец 15 входного звена всегда находится в плоскости плеча 2 (точка Р лежит на оси СГ плеча 121, а растяжение ЛГ=СР прукины определяется как рвцовеццвдю 1 ции мо."11 енг М - г 11 н 1входцом звене 6 от упругой силы Е=с Л 1 пружины с и,ечом 11=а сов- (см. фиг. 3), оС определяется по формуле М =са зпц. Жескость с пружины определяется из условия цо,н)й компенсации...
Манипулятор

Номер патента: 1521580
Опубликовано: 15.11.1989
Авторы: Бронников, Володин, Королев
МПК: B25J 11/00, B25J 9/00
Метки: манипулятор
...с поводком 17, и электромагниты 19, связанные с поводком рычагом 6. На шлицевом валу 3 подвижно в поводке7 установлена приводная шестерня 20.Манипулятор работает следуюгцим образом. Поочередным включением электромагнитов 19 рычаг 16 ггеремен 1 ает поводок 17 и приводную шестерню 20 до зацепления с одной рейкой 6 нли двумя рейками 6 и 7. При этом выступ поводка7 отводит фиксатор0 или два фиксатора 10 и 11. При отключенных электромагнитах 9 пружина 8 возвращает поводок 17 и рычаг 16 в исходное положение, вводя шестерню 20 в зацепление с рейкой 5, а выступ поводка 17 отводит фиксатор 15,Во время переключений двигатель 12 находится в режиме удержания. Выход любого механизма в исходное положение происходит при отключении двигателя...