B25J 11/00 — Манипуляторы, не отнесенные к другим рубрикам
Устройство для защиты робота

Номер патента: 1558667
Опубликовано: 23.04.1990
Авторы: Курендаш, Пархоменко, Трищ, Удалов
МПК: B25J 11/00
...(продольное),движение оси геркона 9, Например придействии радиальной силы К на гофрированную мембрану 2 действует моментная нагрузка, приводящая к ее изгибу и, следовательно, к поворотугеркона 9 в пространстве телесного4угла. При действии же осевого усилиягофрированная мембрана 2 испытывает деформацию растяжения, обеспечивая осевое 1,продольное ) движение геркона 9, Указанные движения приводятк уменьшению воздушных зазоров междушайбой 24 и полюсным наконечником 22а также между полюсным наконечником 17 и нижним контактным сердечником геркона 9(в случае поворотногодвижения оси геркона),Последнее обстоятельство сопровождается уменьшением сопротивлениямагннтопровоцной цепи, включающейпружинную шайбу 9, кольцевой магнитопровод 20, полюсгщй...
Манипулятор

Номер патента: 1378234
Опубликовано: 30.04.1990
Авторы: Семенов, Яковлев, Ямпольский
МПК: B25J 11/00
Метки: манипулятор
...и устранение зазоров в механизме перемещения корпуса манипулятора.Существо изобретения поясняется чертежом.Манипулятор содержит основание 1 с закрепленным на нем приводом 2, который приводит вовращение кривошип 3, связанный через шатун 4 с подвижным корпусом 5, на котором расположен исполнительный орган,Механизм уравновешивания корпуса 5 вы полнен в виде вертикальных стоек б и упругих пластин 7, соединенных с этими стойками и корпусом. Упругие пластины 7 имеют Ш-образную форму и закрепляются средними лепестками к корпусу 5, а крайними - к вертикальным стойкам б. В свободном состоянии средние лепестки пластин 7 образуют угол с ее крайними лепестками, т.е. предварительно сдеформированы.Манипулятор работает следующим образом.По...
Стенд для испытания и аттестации промышленных роботов

Номер патента: 1562130
Опубликовано: 07.05.1990
Авторы: Владов, Галлай, Данилевский
МПК: B25J 11/00
Метки: аттестации, испытания, промышленных, роботов, стенд
...на валу датчика 14 положения, введена в зацеплеще с зубчатой рейкой 5С одной стороны к оси поворотного диска 3 присоединен электродвигатель 16, с другой стороны - датчик 17 положения.Стенд работает следующим образом.Испытуемый образец промьппленного робота устанавливается перед стендом и программируется так, чтобы его первым движением был подход к стыковочному элементу 9 и захват стержня, предусмотренного на нем. Далее записывается тест-программа робота, и он включается в работу в автоматическом режиме. Стыковочный элемент 9, удерживаемый в схвате робота движется вместе с ним, заставляя стержни 4 перемещаться вдоль своих осей. Шарнирные соединения стержней 4 со стыковочным элементом 9 и поворотным диском, 3 позволяют захвату робота...
Автооператор

Номер патента: 1563895
Опубликовано: 15.05.1990
МПК: B23Q 7/04, B25J 11/00
Метки: автооператор
...6 и поддерживаемую более сильной пружиной 17. Корпус 1 имеет возможность поворота на 270 до упора 18, укладывая деталь 10 в тару 19. Упоры 4 и 18 расположены во взаимно перпендикулярных плоскостях. 3 ОАвтооператор работает следующим образом. Форлила изобретения В исходном положении шток-рейка 3 и втулка 6 отведейы в крайнее правое положение, схваты расжаты, пружины 12 и 15 находятся в состоянии рабочей нагрузки, пружины 14 и 17 - в состоянии предварительной нагрузки. При этом ось шток-рейки 3 совпадает с осью изделия 10, находящегося в лотке 9, Усилия пружин 12 и 15 создают момент, прижимающий автооператор к упору 4.При вращении вала-шестерни 2 по ходу часовой стрелки толкатель 11 под действием пружины 12, имеющей усилие предварительной...
Манипулятор

Номер патента: 1563966
Опубликовано: 15.05.1990
Авторы: Бредихин, Соколянский, Шмырев
МПК: B25J 11/00, B25J 9/10
Метки: манипулятор
...с возможностью вращения междубуртом 25 вала 14 и ограничительнымпружинным кольцом 26 с помощью упорного подшипника 27 и колец 28. На несущей части 24 закреплен поводок 29,контактирующий роликом 30 с цилиндрическим кулачком 22. Кронштейн 23 удерживается от поворота относительно вала 14 штифтом 3 1, размещенным однимсвоим концом в вертикальных направляющих 32, выполненных в корпусе 1, адругим концом жестко закрепленным наповодке 29. С целью уменьшения перекосов и давления на вал .14 в устройствеможет устанавливаться второй поводок33 и второй кулачок 34 (см. фиг.4),размещенный внутри кулачка 22 и имеющего одинаковое расстояние между ниж 4ней и верхней рабочей поверхностью.Исполнительное устройство 15 поджима -ется к кулачкам 22 и 34...
Промышленный робот

Номер патента: 1563967
Опубликовано: 15.05.1990
Авторы: Болотин, Зиндер, Табачник, Федосеенков, Шибеко
МПК: B25J 11/00, B25J 9/00
Метки: промышленный, робот
...пружины этих механизмов,жестко закрепленные на платформе,Шарниры крепления этих гибких элементов к входному звену расположены симметрично относительно оси поворотаплатформы, в результате чего обеспечивается симметрия силовой характеристики механизмов уравновешивания.3 ил. звездочки 31, 32 таким образом, что цепи огибают направляющие звездочки соответственно с двух противоположных сторон (фиг.3) . Передаточный махнизм привода поворота платформы имеет генератор 33 волновой передачи 12, гибкое колесо 34, зубчатую передачу 35,Устройство работает следующим образом.Вал двигателя 7 приводит во вращение генератор 33 волнового редуктора 12, Выходной элемент редуктора гибкое колесо 34 приводит во вращение жестко соединенную с ним платформу 2,...
Мобильный робот

Номер патента: 1563968
Опубликовано: 15.05.1990
Автор: Машков
МПК: B25J 11/00
...Для улучшения условий работыопорных устройств робот может бытьснабжен дополнительными ходовыми роликами 27 и 28 (Фиг,9), а также дополнительными ходовыми направляющими 29,имеющими окна 30 для прохода роликов27 и 28,Робот может быть также снабжендополнительными замкнутыми гибкимиэлемента ми 31, та кже ки нема тическисвязанными с приводом,Мобильный робот работает следующимобразом.При включении двигателей 11 привода крутящий момент через валы 10передается на звездочки 9, приводящие в движение замкнутые гибкие элементы, состоящие из пластин 12 и 13.Корпус 1 робота своими ходовыми направляющими 2 перемещается по роликам8, а ролики 16 звеньев перемещаютсяпо направляющей 4. Каждое звеноверхней ветви цепи, попадая на правую (фиг.1) звездочку 9,...
Манипулятор

Номер патента: 1563969
Опубликовано: 15.05.1990
МПК: B25J 1/02, B25J 11/00
Метки: манипулятор
...(фиг.4)1= Н-Ь, 1 =1+ 2 й - М, где 1 и 1 - расстояния от центровзахватных устройств 3и 4 до осей шарнировподвеса жестко связанных с ними звеньев 12;Н - высота уровня оси шарнира 5 кривошипа исполнительного устройства 1над уровнем пола;Е - отношение веса заготовки к весу детали;Й - расстояние между осямишарниров 5 и 6 исполнительного устройства 2;М - расстояние между осямишарниров 5 и 6 исполнительного устройства 1.63969 6После этого заготовка устанавливаетсяв патрон, а деталь опускается на наклонную плоскость 16 и оператор, преодолевая только трение в шарнирах, переводит разгруженный манипулятор висходное положение.Шарнирное соединение с тягами 10звеньев 12 позволяет отклонить оси 10 последних от вертикали с целью облегчения снятия...
Манипулятор

Номер патента: 1563970
Опубликовано: 15.05.1990
Авторы: Купцов, Лемберанский
МПК: B25J 11/00
Метки: манипулятор
...за счет обеспечения независимого перемещения губок захватаНа чертеже представлена схема манипулятора. М анипулятор содержит основание 1, на котором шарнирно установлена куиса 2 с захватом 3. Кулиса 2 снабена приводом 4 ее поворота. Внутри ,кулисы 2 на направляющих 5 установрен ползун 6, На последнем закреплен палец 7, взаимодействующий с пазом 8 кулисы 2. Палец 7 контактирует с,ополнительной кулисой 9, установлен ,ной на основании 1 с помощью шарнирно-винтового соединения 10. На кулие 9 установлены регулируемые упоры 11, Они перемещаются винтами 12. Зах 1 ат 3 выполнен из шарнирно связанных Губок 13 и 14 . Губка 13 жестко связаНа с .ползуном. С губкой 14 шарнирно соединен шатун 15, на котором винтовым оединением установлен...
L-координатный механизм

Номер патента: 1563978
Опубликовано: 15.05.1990
Авторы: Глазунов, Дайч, Колискор, Модель, Рашоян, Федосеева, Чернов
МПК: B25J 11/00, B25J 17/00
Метки: l-координатный, механизм
...на ,фиг. - расчетная схема для определения положения подвижного звена.Ь-координатный пространственный механизм содержит основание 1, подвижное звено 2, которые соединяются с помощью сферических шарниров 3 ;шестью приводами 4 линейного переме)цения с регуляторами длины 5, а также измерителями 6 расстояния между шарнирами 3 основания 1 и шарнирами 3 подвижного звена 2.Механизмы, представленные на фиг.1-6, отличаются количеством точек основания 1, в которых размещаются Шарниры 3. Количество точек на основании 1 в этих механизмах изменяется от 3 до 6. Эти механизмы реализуют свою отличную от других структуру-координат.При управлении движением Ь-коор- ф динатных пространственных механизмов необходимо решать прямую и обратную задачу о...
Стенд для контроля перемещений промышленных роботов манипуляторов

Номер патента: 1565675
Опубликовано: 23.05.1990
Авторы: Карташов, Пашков, Погорелов
МПК: B25J 11/00, B25J 19/04
Метки: манипуляторов, перемещений, промышленных, роботов, стенд
...фотоприемника (фиг. 6), т. е. Происхолит захват пятном оптической оси фотоприемника с образованием постоянного контура слежения за положением этой оси.Поскольку быстролействие оптоэлектронной системы слежения значительно превышает быстродействие механической системы манипулятора, любые перемецеция манипулятора будут сопровождаться синхронным перемецецием пятна по экрану ЭЛТ 2. По мере устранения рассогласования осей пятна А и фотоприемника, значения 1.1 1)будут умецшшатшся до величины, пропорциональной координатам Х и У пятнафиг. 4), т. е. после захвата положения оси фотоприемника на пластинах 8 и 9 автоматически установятся новые значения 1 и 1, соответствующие координатам Х и У пятна на экране. Эти значения напряжения через цифровые...
Стенд для испытания манипуляторов

Номер патента: 1565676
Опубликовано: 23.05.1990
МПК: B25J 11/00
Метки: испытания, манипуляторов, стенд
...19 с последующим стопорецием втулки 18 прижимом 20. Соединение валика 14 с датч иком 21 угла поворота может быть осуществлено, например, муфтой 22. Возможны другие виды передачи перемещений. Ролики 8 (фиг. 3) создают призму для базирования барабана по винтовой поверхности и разнесены вдоль оси ца величину хода винтовой линии, пропорционально величине центрального угла призмы. Ролики 9, размещенные на рычаге 23, пружиной 24 прижимают барабан к роликам 8, что предотвращает заклинивание барабана при вращении без зазора. При перемещениях троса через фильеру 25 схватом манипулятора обеспечивается постоянный контакт ролика 16 с водилом 15. Усилие натяжения троса определяется заводом пружины 17. Таким образом, базирование барабана производитСя...
Манипулятор

Номер патента: 1565677
Опубликовано: 23.05.1990
Авторы: Бергер, Диневич, Коренчук, Моцьо
МПК: B25J 11/00
Метки: манипулятор
...работает следующим образом.При повороте выходного вала привода 3 осуществляется поворот всей установленной на Валу системы состоящей из ВОди ч 40 4, сателлитов, ползуна 9 и рейки 7 с исполнительным органом 8, так как водила 4 жестко закреплены на выходном валу с помощью ВинтОВ 11.При этом нижние сателлитные колеса 5 обкатываются вокруг неподвижного 45 центрального колеса 2, что приводит к вра 1 цению верхних колес 6, входян 1 их в зацепление с рейкой 7.Это вызывает дополнительное прямолинейное перемещение рейки 7 вдоль ползуна 9. В результате схваты исполнитель ного органа 8 перемешаются по незамкнутой криволинейной траектории.Форма этой траектории определяется параметром 1 - расстоянием от оси выходного вала привода 3 до рейки 7....
Уравновешенный манипулятор

Номер патента: 1567370
Опубликовано: 30.05.1990
Автор: Кордашенко
МПК: B25J 1/02, B25J 11/00
Метки: манипулятор, уравновешенный
...горизонтальных осей, имотя не.уравновепенные массы этих звеньев 1 и 2.Звено 1 может вращаться нд угол, больций180. (фиг. 2).11 ри нахождении звеня 1 в секторе 1(фиг, 2) имеют место положительные опрокилывающие моменты. Нри нахожлениизвена 1 в секторе 2 возникают мочецтыс противоположным знаком.Уравновешивание звена 1 при нахожлении его в секторе 1 при неподвижном звене 2происходит следующим образом.На кулачок 6 через промежуточный ролик действует пружина 8, созлавая момент,равный по величине (но с противополокным знаком) опрокилывающему моментузвена 1. Уравновешивание звена 1 при цеполвижцом звене 2 и при нахождении его в секторд( 2 (фИГ 2) ПрОИСХ(пнт От ВОЗЛЕй(ТВИЯ пружины 7 на кулачок 5 црез прочежуточ.ный ролик Кулачки 5 и 6...
Привод захвата
Номер патента: 1569224
Опубликовано: 07.06.1990
Авторы: Гамаюн, Голованов, Никитин
МПК: B25J 11/00
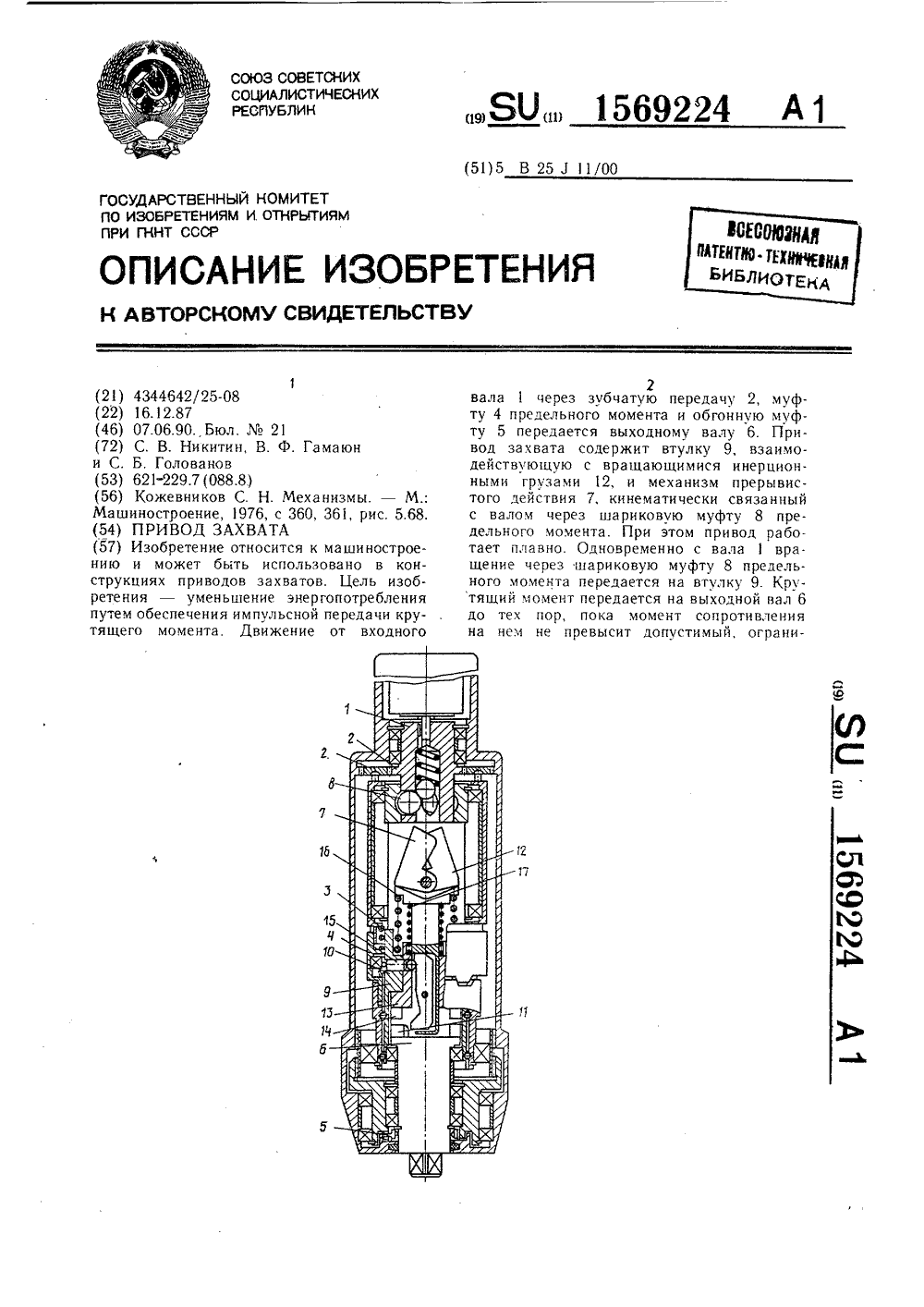
...крутящего мо- ника 14 и наковальник 11. Привод срабамента и обгонную муфту 5 с выходным тывает импульсно.валом 6. Привод снабжен механизмом 7 После этого пружина 16 возвращаетпрерывистого действия, кинематически свя- вал3 в первоначальное положение, что поззанным с входным валомчерез допол- воляет вернуться в первоначальное положенительную муфту 8 предельного крутящего 2 Б ние последовательно стопору 15 и муфте 4момента. Механизм 7 прерывистого действия предельного момента. Далее при необхопериодически взаимодействует с втулкой 9, димости цикл повторяется,установленной в корпусе 10. Механизм 7 со- Таким образом, механизм 7 прерывисдержит наковальню 11, установленную на того действия повышает эффективность равыходном валу 6. Втулка 9...
Устройство автоматической смены инструментов промышленного робота

Номер патента: 1572404
Опубликовано: 15.06.1990
МПК: B23Q 3/155, B25J 11/00
Метки: автоматической, инструментов, промышленного, робота, смены
...кабеля 55 к одному из электродов сварочного пистолета 27. На плоских концевых частях 52 шины 51 имеются контактные поверхности,покрытые слоем серебра для повышения.эффективности электрического контакта.В то время как шины 51 второй пары жестко закреплены на фланце Вкрепежными винтами 56, шины 46 первой пары К"способны выполнять небольшие установочные перемещения,а тарелочные пружины 57 вложенныемежду шинами 46 и держателем А, обеспечивают заданное контактное усилие(натяг) соответственными частями47 и 52 шин 46 и 51 и более мощноепитание для сварочного пистолета 27.Прижимная пластина 58 и профилированные элементы 59 вставлены междутарельчатыми пружинами 57 и шинами, 46 соответственно, чтобы эти шинымогли совершать небольшие...
Манипулятор
Номер патента: 1572802
Опубликовано: 23.06.1990
Автор: Мамыкин
МПК: B25J 11/00
Метки: манипулятор
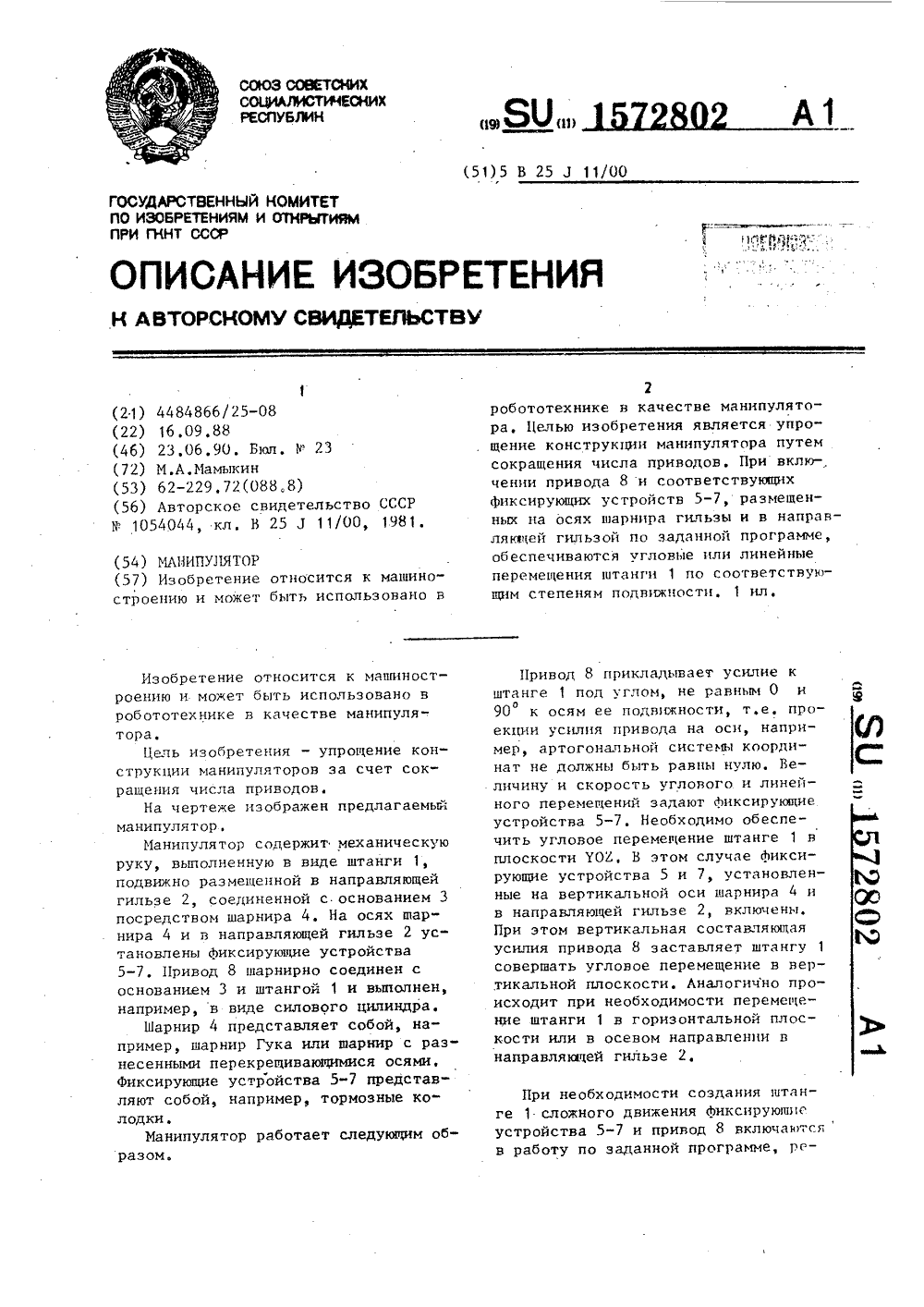
...цилиндра.Шарнир 4 представляет собой, например, шарнир Гука или шарнир с разнесенными перекрещивающимися осями,Фиксирующие устройства 5-7 представляют собой, например, тормозные колодки,Манипулятор работает следующим обр бототехнике в качестве манипулятора, Целью изобретения является упрощение конструкции манипулятора путем сокращения числа приводов. При включении привода 8 и соответствующих Фиксирующих устройств 5-7, размещенных на осях шарнира гильзы и в напра ляющей гильзой по заданной программе обеспечиваются угловые или линейные перемещения штанги 1 по соответствую щим степеням подвижности, 1 ил,екции усилия привода на мер, артогональной систе нат не должны быть равнь личину и скорость углово ного перемещений задают устройства...
Манипулятор

Номер патента: 1576307
Опубликовано: 07.07.1990
Автор: Белов
МПК: B25J 11/00
Метки: манипулятор
...цепь 7Вместо50срезного штифта 17 может быть использован подпружиненный фиксатор,цто обеспечивает многократность егосрабатывания без замены, Манипулятор55должен снабжаться комплектом узлов10 с различными величинами изгиба унаправляющей 18. На цепь 7 могут устанавливаться несколько узлов 10,что позволит получить сложную конфигурацию изгиба цепи 7. На узле 11 крепления имеются отверстия 19 для закрепления на нем растяжки и при необходимости кабеля (не показаны). Растяжка препятствует случайному повороту звеньев цепи 7.Привод 12 возврата узлов измеиени 1 направления перемещения выполнен в в виде лебедки и канатов 20, связывающих корпуса 15 узлов изменения направления перемещения цепи 7 с лебедкой.Манипулятор работает следующим...
Привод робота-манипулятора

Номер патента: 1576308
Опубликовано: 07.07.1990
Автор: Литвиненко
МПК: B25J 11/00, B25J 9/12
Метки: привод, робота-манипулятора
...(Фиг. 2) состоитиз участка линейных проводников 16 илобовых частей. Лобовые части секции включают боковые 2 и 25 и центральный 26 участки.Дополнительная магнитная системаустановлена в зоне лобовых частей 17на основании 27, Она имеет магнитопровод 28, катушку 29 и полюсные наконечники 30, установленные у лобовыхчастей 17. 50Привод работает следующим образом,При приходе модуля в точку позиционирования якорь 15 помещается взазоре между полюсами 18 основноймагнитной системы 19 (линейные проводники 16) и между полюсами 30 дополнительной магнитной системы 28(лобовые части 17), Включается питание модуля, ток по щеткам 22 подводится к якорю 15До этого моментавремени пружины 12 поджимают обоймы11 с подшипниками 10 к диску 7. Накладки 9 прижаты к...
Устройство шагового перемещения

Номер патента: 1579768
Опубликовано: 23.07.1990
Автор: Флейтман
МПК: B25J 11/00, B25J 9/00
Метки: перемещения, шагового
...3 и от диаметра червячного колеса 5, причем этот угол можетбыть выбран в диапазоне от долей градуса до нескольких полных оборотов,При этом перемещении червяка 3 основной серводвигатель 8 оказывается эастопоренным, так как он подбираетсямаломощным и имеет мягкую характеристику, т,е. его выходной вал не можетповернуть червяк 3.При обратном направлении перемещения червяка 3, например влево (фиг.1,на червячное колесо 5 со стороны червяка 3 не передается рабочая нагрузкаи мощность основного серводвигателя 89768 510 15 20 25 30 35 40 повышения точности позиционирования 5 1 г 7оказывается достаточной для вращениячервяка 3Вращаясь от серводвигателя 8 и линейно перемещаясь от вибратора 2, червяк 3 лищь обкатываетсяпо зубчатому венцу колеса 5,...
Манипулятор

Номер патента: 1583282
Опубликовано: 07.08.1990
Автор: Шоланов
МПК: B25J 11/00
Метки: манипулятор
...в виде30внешнего 10 и внутреннего 11 телескопических элементов. В этом случае одиниз телескопических звеньев 10 образует сферическую пару или заменяющее еекинематическое соединение со звеном 7а другой элемент 11 - со звеном 3. Из 35менение размеров телескопического звена Фиксируется автоматически Фиксатором, который имеет подвижную втулку12, имеюцую Фланцы и образующие винтовую пару с внутренним телескопи 40чееким элементом 11, Рля исключениядвижения ротации телескопический элемент 11 имеет шлицевой наконечник 13,который перемещается по внутреннимшляцам элемента 10. Кроме того, Фик 45сатор включает в себя электромагнит 14 и рычаг 15, связанный одним плечом с сердечником этого электромагнита. Втулка 12 фиксатора имеет фланцы 16 и...
Модуль резонансного манипулятора

Номер патента: 1583283
Опубликовано: 07.08.1990
Авторы: Духанин, Семеноженков
МПК: B25J 11/00
Метки: манипулятора, модуль, резонансного
...также предусмотреныдля регулировки усилия предваритель 50ного поджатия упругих элементов, выполненных в виде пружин 11 и 17.Устройство работает следующим образом.В исходном положении, например,дпя медленного перемещения выходногозвена 1 пружины 11 и 17 сжаты, упор23 пневмоцилиндром 24 введен в отверстие 25 опорной шайбы 18, упоры 8 и 10 взаимодействуют с опорными шайбами 13 и 19, оси рычагов 3 и 4 примерно совпадают, т,е. система занимает положение неустойчивого равновесия. Для начала движения включают двигатель 6, который поворачивает вал 5, а вместе с ним и рычаг 4. Система рычагов 3 и 4 выходит из положения неустойчивого равновесия, а пружина 11, давя на опорную шайбу 13 и на упор 8, разгоняет звено 1 и инерционные массы,...
Манипулятор

Номер патента: 1585144
Опубликовано: 15.08.1990
Авторы: Айрапетян, Арзуманян, Егишян, Парикян, Саркисян, Степанян
МПК: B25J 11/00, B25J 17/00
Метки: манипулятор
...звено 5 с основанием 2. При этом оси шарниров 7 и 6 каждого передаточного механизма параллельны между со" бой. 45Манипулятор работает следующим образом.При включении приводов (на фиг.1 не показаны) происходит поворот по заданной программе входных звеньев 5 передаточных маханизмов. Вследствие кинематической связи платформы 1 с каждым из приводов посредством соответствующего передаточного механизма совоупось движений дных звеньев всех передаточных механизмов приводит к смещению в пространстве выходного звена манипулятора (платформы). В результате этого платфорПри этом сообщается перемещение тягам 3, которые связаны со звеньями4 вращательными парами 6, оси которых параллельны осям пар 7. Такимобразом, осуществляется перемещениеи ориентация...
Манипулятор

Номер патента: 1590372
Опубликовано: 07.09.1990
Автор: Полетучий
МПК: B25J 11/00, B25J 17/00
Метки: манипулятор
...из них,или один независимо от остальных. Например, для поворота звена 2 относительно звена 1 на требуемый угол включаетсядвигатель 6, вследствие чего получает вра 55щение с частотой вала двигателя шкив 9,приводящий во вращение через зубчатыйремень 13 ведомый шкив 12, и связанные с ним переходник 14, вал 15, корпус 16 генератора 17 волн и сам генератор 17 волн, от которого вращение через зубчатые колеса24 и 28, валик 28. зубчатые колеса 25 и 27 передается генератору 23 волн. Вращаясь, генераторы 17 и 23 волн деформируют гибкое зубчатое колесо 18, которое, зацепляясь с жесткими колесами 21 и 22, вызывает замедленное вращение жесткого колеса 21 и связанного с ним ведомого звена 2. При этом жесткое колесо 22, связанное с валом 30 шарнира и...
Манипулятор

Номер патента: 1593947
Опубликовано: 23.09.1990
Авторы: Гуркало, Поляков, Пономарев
МПК: B25J 11/00, B25J 18/00
Метки: манипулятор
...- 10, осуществляющие поворот звеньев относительно осей 1 - 1, 11 - 11, 111 - 111, 1 Ч - 1 Ч, Ч - Ч и сменный инструмент 11. Крепление манипулятора осуществляется посредством кронштейна 12. Уравновешивающий механизм содержит балансиры 13, связанные шарнирно с первым звеном 3 или опорным звеном 2, упругими элементами 14, упоры 15 и 16, установленные на опорном звене, ограничитель 17 хода балансиров, установленный на балансирах и взаимодействующий с первым звеном и упорами, кулачки 18, закрепленные на втором звене, и гибкие элементы 19, уложенные по профилю кулачков и связывающие упругие элементы с вторым звеном.Манипулятор работает следующим образом.В транспортном положении балансиры 13 поджаты упругими элементами 14 к первому звену 3 и...
Манипулятор

Номер патента: 1593948
Опубликовано: 23.09.1990
Авторы: Дмитриев, Литвиненко, Свергунов
МПК: B25J 11/00
Метки: манипулятор
...38. Схват имеет губки 39, закрепленные в корпусе 40 в подшипниках 41. С помощью подшипников 42, тяг 43, подшипников 44 губки соединены со вкладышем 45, который в подшипнике 46 установлен в корпусе 40. К вкладышу присоединен шток 47 от рейки 28, а к корпусу - шток 48 от рейки 31. Шток 47 установлен в корпусе 40 в поступательном подшипнике 49. Позицией 50 обозначена захватываемая пластина.Технологический процесс плазменного напыления кремниевых пластин состоит из следующих этапов: помещение пластин в шлюз 1 внешним загрузчиком, шлюзование пластины, перемещение пластины из шлюза 1 в реактор 3, напыление пластины с помощью плазмы в реакторе, перемещение пластины из реактора в шлюз 4, шлюзование и вывод пластины из шлюза или передача...
Манипулятор

Номер патента: 1602660
Опубликовано: 30.10.1990
Авторы: Верховский, Крашенинников, Солдаткин, Уваров
МПК: B23P 21/00, B25J 11/00
Метки: манипулятор
...соединен с валом двигателя 21, а второй - с шестерней 20, Работа манипулятора рассматривается на примере сборки изделия, состоящего из статора 29 и ротора 30.Манипулятор работает следующим образом.. Для выполнения технологической операции силовые элементы 4 и 5 подводятся к сборочной позиции поворотом корпуса 3 относительно основания 1. При этом элемент 4 находится в крайнем левом, а элемент 5 - в крайнем правом положении. Для фиксирования ротора 30 собираемого изделия силовыми элементами 4 и 5 производится их сближение путем включения двигателей 10 и 21. При этом движение к силовом элементу 5 передается через промежуточный вал 13, зубчатый редуктор, имеющий зубчатые колеса 11 и 12, цепную передачу 8 и передачу "винт-гайка". Движение...
Манипулятор

Номер патента: 1602731
Опубликовано: 30.10.1990
Автор: Маркитанов
МПК: B25J 11/00, B25J 9/06
Метки: манипулятор
...например в виде приводной или неприводной тележки. Основание 1 может быть расположено снизу, сверху или сбоку.. На основании 1 установлены неподвиж ная опора 2 и ползун в гай 3 на винте 4. Винт снабжен опорами 5 и приводом 6, например в виде электродвигателя с редуктором. На опоре 2 и гайке 3 шарнирно установлены звенья 7 и 8 передаточного механизма, имеющие боковые шарниры 9 и 10 и центральный шарнир 11. Основание 12 снабжено неподвижной опорой 13 и ползуном 14 направляющей 15, которая установлена в опорах 16. Опора 13 и ползун 14 шарнирно соединены со звеньями 7 и 8. На основа нии 12 установлен механизм 17 привода рабочего органа 18, например металлической щетки, для.очистки криволинейной поверхности 9. На всех звеньях...
Манипулятор

Номер патента: 1602732
Опубликовано: 30.10.1990
МПК: B25J 11/00
Метки: манипулятор
...21.Система 15 управления содержит (фиг. 4) реверсивный двигатель 22, электромагниты 23 и 24, блокирующее устройство 25 и ключи К 1 и К 2.Кривошип 10, рычаг 9, играющий роль шатуна, несущее звено 4 и поворотное звено 12 образуют с корпусом 1 пространственный пятизвенный механизм, шатунная т. М которого, совпадающая с центром шарнира звеньев 6 и 7, перемещается по траектории тт, которая и определяет идентичную траекторию пп перемещения центра У схвата.Манипулятор работает следующим образом.Вращательное движение кривошипа 10 преобразуется посредством рычага 9, верхнего звена 6 и несущего звена 4 во вращательное движение поворотного звена 12. При этом шатунная т, М перемещается по кривой тт. Параллелограммы 3 и 8 обес 10 15 передачи...
Искусственная мышца

Номер патента: 1602742
Опубликовано: 30.10.1990
Авторы: Мозговой, Новичихин, Павловец, Плюгачев
МПК: B25J 11/00, B25J 18/02
Метки: искусственная, мышца
...с генератором 10 напрямую, а другой через инвертор 11. Источник 9 постоянного напряжения и выходы усилителей 12 и 13 через коммутируюш,ий элемент, например галетный переключатель 14, связаны с электродами 3 и электродами 7.Устройство работает следующим образом, В исходном среднем положении галетного переключателя 14 электроды находятся под постоянным напряжением источника 9, фиксируя в твердом состоянии электрореологическую жидкость, исключая тем самым движения искусственной мышцы, Для сокращения или удлинения мышцы переключатель 14 устанавливается в одно из крайних положений. При этом генератор 10, соединенный с источником 9, вырабатывает импульсы О и 1, поступающие через инвертор 11 на усилитель 12 и на усилитель 13 непосредственно...