B25J 9/00 — Манипуляторы с программным управлением
Манипулятор

Номер патента: 1537513
Опубликовано: 23.01.1990
Авторы: Наурызбаев, Тоганбаев
МПК: B25J 11/00, B25J 9/00
Метки: манипулятор
...кривошипа 10 привода на180"оДно из упругих звеньев 3 каждой шарнирно закреплены на кривошипах, а другие кинематически связаны с корпусами соответствующих исполнительных устройств. При этом гибкие элементы 7, одни концы которых закреплены на барабане 8, перемещают выдвижные штангис находящимися на них рабочими органами 5. С целью уменьшения колебаний одна из пар упругих звеньев соединяет концы кривошипов перекрестно, что обеспечивает встречное движение исполнительных устройств 1 з.п. Ф-лы,ил е пары увлекает за собой конец ведомогоэлемента 11 с жестко закрепленным нанем исполнительным устройством 2. Наматываемый конец гибкого элемента 7постепенно сжимает пружину и втягивает штангу 1 в корпус 3, а сматываемыйконец освоЬождает штангу 1...
Промышленный робот

Номер патента: 1537514
Опубликовано: 23.01.1990
МПК: B25J 11/00, B25J 9/00
Метки: промышленный, робот
...цилиндров имеют большийдиаметр, чем поршния основного цилиндра. Штоки дополнительных силовых цилиндров являются упорами для поршней10 и 11. В окне 17 корпуса основногосилового цилиндра расположено звено18, связанное с ползуном 7 шарниром19, ижестко связанная со звеном 18 шестерня 20, образующая зацепление срейкой 12, К звену 18 крепится захватное устройство 21 с грузом 22,привод ротации которого в вертикальной плоскости аналогичен приводу ротации звена 18. Схема связей полостейсиловых цилиндров и золотниковых распределителей включает трехпоэиционный золотник 23 и двухпозиционные золотники 24.Манипулятор работает следующим образом.Движение тележки по направляющимоснования осуществляется от двигателя-редуктора 3 и передачи, содержацей...
Устройство для перемещения рабочего органа

Номер патента: 1541043
Опубликовано: 07.02.1990
МПК: B25J 9/00
Метки: органа, перемещения, рабочего
...будет неработоспособной, так как произойдет заклинивание элементов Фиксатора. Ширина прорези на рейке 7 выбирается из соотно- Щшенияд.(И(8 2где И - потери энергии эа один шаг;с " длина шага;С - суммарная жесткость задействованных на шаг упругих элементов;1 - ширина прорезей.При несоблюдении указанного условия часть 5 Фиксатора, установленная на подвижном звене не попадает в прсрезь и не произойдет Фиксации и восполнения диссепативной энергии:Устройство работает следующим образом.В исходном положении звенья 2 н 3 зафиксированы относительно друг друга при помощи частей фиксаторов, Изменение шагового перемещения звеньев производится путем смены порядка чере дования расфиксации звеньев с учетом упругого состояния пружины. Если необходимо...
Устройство для подачи грузов

Номер патента: 1541044
Опубликовано: 07.02.1990
Автор: Анохин
МПК: B25J 9/00
...взаимодействугощих - дну. мя серповидными поводками 7 устар : новленными на штанге маятника 2 н Устройстно для подачи грузов, содержащее основание, маятник с регули.руемой амплитудой колебаний, шарнирно установленной на основании, электропривод, кинематически связанный с маятником, и схнат, размещенный на свободном конце маятника, о т л и ч а ю щ е е с я тем, что, с целью повышения производительности при снижении энергозатрат, оно снабжено серповиднг.гми поводками, установленными на маятнике в точке его шарнирного соединения с основанием, и толкателяьпг, шарнирно установленными на основании и кинематически связанными с электроприводом, а также предназначенными дпя взаимодействия с поводосновании.40Устройство для подачи грузен работает...
Манипулятор

Номер патента: 1541045
Опубликовано: 07.02.1990
Авторы: Гришин, Колыванов, Простопопов
МПК: B25J 9/00
Метки: манипулятор
...через зубчатые колеса 1 и 18 с двигателем 5. Червячные колеса 13 расположенныев узлах 3 и 4, связаны между собой валом 19. Сопрягаемый шарнир 9(Фигв 4) состоит из двух узлов 3 и 4 связанных между собой через подшипники 10 и 11, установленные в корпусах узлов 3 и 4, Натяжение подшипников 10 и 11 обеспечивает крышка 12,50 внутри которой установлены подшипники 20 и 21, Фланец 22 цилиндрической частью закрепляется с подшипниками20 и 21, а другая часть Фланца 22 имеет место крепления со звеньями, основанием, движителем или захватом, Редуктор б имеет червячное колесо 13, закрепленное в подшипниках 14ги 1 э, которое находится в зацеплении с червяком 1 б и связано через зубчатые колеса 17 и 18 с двигателем 5. Червячные колеса 13, расположенные...
Манипуляционное устройство

Номер патента: 1541048
Опубликовано: 07.02.1990
Авторы: Ворошилов, Лихоманов, Петров, Пышный
МПК: B25J 13/00, B25J 9/00
Метки: манипуляционное
...звеньев и ного органа; передаточная матри звенного механизма ем виде матрица с уктурой исполнителна манипуляционного устройства. Так,например, для манипулятора МЭМ 10СДГ она имеет вид де и - передаточное число в конических зубчатых передачах.Для независимого движения звеньев 15 еобходимо, чтобы матрица с была диагональной. Связь между сигналами управления ч и сигналами, поступающими на вход усилителей мощности (ч,),1 имеет вид 26 1 ч 1 с,1 чи1 де с - передаточная матрица элек трической схемы развязки движений ч;5 = с ДсК=с 110,Где су - матрица управления манипу-ляционным устройством, следовательно,-с; =с,Д с 1. Тогда связь междучи 1 и т 1 ч;1 имеет вид ч=с, ч,.1 -сс, 1ч ) ( 1 1 Уравнение (1) показывает как долж- а быть организована...
Система автоматического манипулирования

Номер патента: 1542792
Опубликовано: 15.02.1990
Автор: Маслов
МПК: B25J 9/00
Метки: манипулирования
...орган с одной половиной 1 стыковочногоустройства 3, выполненной, например,в виде втулки с внутренним конусом, а55также замком для окончательной фи ксаций обеих половин стыковочного устройстйа, после чего надвигает его на вторую половину 4 стыковоцного устройства, выполненную, например, в виде штыря. Втулка с конусом имеет возможностьсмещения в любом направлении для. компенсации погрешности позиционирования и попадания штыря при его скольжении по образующим в центральное отверстие конуса, где он затем фиксируется специальной защелкой с пневматическим приводом. При этом также исключается возможность произвольного смещения втулки с конусом. Срабатывание защелки инициирует сигнал конец- ного датчика, который выдает разрешающий сигнал в...
Резонансный привод

Номер патента: 1544550
Опубликовано: 23.02.1990
Авторы: Бабицкий, Котлячков, Панин, Чечуров, Шипилов
МПК: B25J 9/00
Метки: привод, резонансный
...перевода инструментальногодиска .12 в следующую рабочую позицию,он посредством гидроцилиндров 15 отводится от корпуса 3на Фиг. 1,3влево ), скользя по шлицам вала 11,в результате чего муфта 14 расцепляется и подаются команды на выключениефиксатора 9 посредством электромагнита 10, и включение двигателя 1, к510 15 20 25 30 35 40 45 50 5 154 которому подводится напряжение нужной полярности, обеспечивающее поворот звена 3, вала 11 и диска 12 в требуемом направлении. 01 естерня 2, закрепленная на валу двигателя 1, выводит привод из положения неустойчивого равновесия, т.е, угол ф 40, При этом вращение кривошипов 4 и 5 под действием силы сжатия упругого элемента и вращающий момент от шестерни 2 двигателя 1 передаются на поворотное ведомое...
Манипулятор

Номер патента: 1548033
Опубликовано: 07.03.1990
Автор: Ромашкин
МПК: B25J 9/00
Метки: манипулятор
...посредством конусных поверхностей промежуточных деталей 9 - 11 с основанием 12 и поршнем 7. Между трубой 3 и колонной 13 установлена направляющая втулка 14, имеющая перекрестно размещенные ролики 15 и радиальные подшипники 16 поворота руки манипулятора. Привод поворота выполнен зубчато-реечным, зубчатые рейки 17 которого установлены в силовом цилиндре 18, закрепленном на колонне 13. Манипулятор работает следуюгцим образом.При подаче воздуха через канал, выполненный в штоке 8, в полость 19 силового цилиндра труба 3 с закрепленной на ней рукой 1 поднимается, при этом воздух из полости 20 через пазы, выполненные в крышке 5, и отверстия в гильзе 4 вытесняется в атмосферу.При подаче воздуха в полость 20 через отверстия в гильзе 4 и пазы в...
Манипулятор

Номер патента: 1548034
Опубликовано: 07.03.1990
Авторы: Бабиченко, Даровских, Жданов, Рудаев
МПК: B25J 9/00
Метки: манипулятор
...10. Управляемые муфты 25 - 27 отк;почены и освобождают колесо 3 и траверсы 6 и 12 от кинематического взаимодействия с осями 4 и 1. Г 1 ри этом ведущее колесо 11, закрепленное на валу 9 подшипниковой опоры, вращается и приводит во вращение промежуточное колесо 3. 11 оследнее, свободно проворачиваясь а оси 4, начинает движение обкатки О 15 20 25 30 35 40(направление обкатки зависит от направления вращения вала 9 двигателя 10) относительно неподвижного зубчатого колеса 2, с которым она находится в зацеплении. Межцентровые расстояния при этом огределяются жесткими траверсами 6, 7 и 12, сбазированными на неподвижной оси 1, оси 4 и валу 9. Совместно с колесом 3 начинает вращение вокруг оси 4 и угловое смешение относительно оси 1...
Манипулятор

Номер патента: 1549741
Опубликовано: 15.03.1990
Автор: Лазарев
МПК: B25J 9/00
Метки: манипулятор
...комитета по изобретениям и.открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина, 101 Изобретение относится к роботостроению и может быть использованодля автоматизации транспортных операций.Цель изобретения - снижение энергоемкости за счет использования единого привода звеньев.На чертеже изображена принципиаль"ная схемаманипулятора.Манипулятор содержит, основание1, звенья 2,и 3, сочлененные шарнирами 4 и 5, схват 6 и реактивный двигатель 7, с оппозитно расположеннымисоплами 8 и 9 в плоскости действияисполнительного механизма, к которомупо трубопроводу 10 подается рабочаясреда. Шарниры 4 и 5 оснащены фиксирующими устройствами,Манипулятор...
Безлюфтовый редуктор

Номер патента: 1549742
Опубликовано: 15.03.1990
Авторы: Кожевников, Косов, Котишадзе, Крахин, Кудрявцев, Солдаткин, Уваров
МПК: B25J 9/00
Метки: безлюфтовый, редуктор
...с выступами 8 соответствующих торцов упругого элемента 4 через выключатель 16,обеспечивающий подачу тока на упругий элемент 4 при реверсе привода.Между частями 2 и 3 установлена демпфирующая прокладка 17, а на ступице 13 - антифрикционная втулка 18,вторая демпфирующая прокладка 19,тарельчатая пружина 20 и подпружиненная гайка 21. Если выполнить выступы 8 с мелким шагом, то перестановкой одной части 2 относительно другойчасти 3 можно изменять натяг междуними. Позицией 22 обозначен. источникэлектрической .энергии,Привод работает следующим образом.45Перед сборкой упругому элементу 4при его нагреве сообщают такую форму,что выступы 8 одного торца 7 смещеныотносительно выступов 8 другого торца 7При достижении температуры окружающей...
Манипулятор для плоских стеклоизделий

Номер патента: 1549743
Опубликовано: 15.03.1990
МПК: B25J 9/00
Метки: манипулятор, плоских, стеклоизделий
...в них звеньев 2 и 3и привода вращения схвата, который вэтом случае устанавливается на звене2 с возможностью свободного проходав звеньях 3 и 4, а отношение длинызвена 3 к длине звена 4 равно 0,65:1, На звене 3 крепится противовес 17.,Передача 7 (фиг. 10) включает генератор 18 волн, корпус 19 с жесткимзубчатым венцом, ведомое :.звено 20 сжестким зубчатым венцом и ведущее 20звено 21 с эксцентриситетом е. Шарниры 9 и 10 (фйг. 11) включают генератор 22 волн, корпус 23 с двумяжесткими зубчатыми венцами, электродвигатели 24, водило 25, связанное со 25звеном 4, и гибкое зубчатое колесо 26.Ианипулятор, перестраиваемый натребуемый типоразмер (фиг. 12), содержит нерегулируемые поступательные пары 27, например винт с фиксируемойгайкой. Схват 1...
Способ управления резонансной механической рукой

Номер патента: 1553373
Опубликовано: 30.03.1990
Авторы: Акинфиев, Иванов, Кочубей, Новогранов, Степанов, Стрельч
МПК: B25J 9/00
Метки: механической, резонансной, рукой
...координата х выбрана меньше координаты, соответствующей остановке подвижного звена, то звено будет еще некоторое время двигаться в прежнем направлении, но при этом происходит интенсивное торможение, поскольку изменилась полярность питающего напряжения электродвигателя, Как частный случай за координату х, можно принять координату, соответствующую остановке подвижного звена при первом приложении питающего напряжения. После того, как звено достигнет положения, соответствующего координате х, и в результате изменения полярности питающего напряжения происходит торможение, а затем и его остановка, оно будет двигаться в другую сторону, пока не достигнет координаты х, при этом повторяется вся последовательность действий, что и при достижении...
Подвижный промышленный робот

Номер патента: 1558661
Опубликовано: 23.04.1990
Авторы: Бостан, Ботез, Дулгеру
МПК: B25J 5/00, B25J 9/00
Метки: подвижный, промышленный, робот
...11 иэ зацепленияс зубьями колес 12,13 и 14 ), В результате зацепления венцов 10 с зубьямиколес 12 и 14, последние вращаютсяс определенной редукцией,Редуцированное вращательное движение колеса 14 передается колонне манипулятора при включенном состояниимуфты 31,Редуцированное вращательное движение колеса 13 через винтовую передачу 17 при включенном состоянии муфты32 передается на вал 18. Далее вращательное движение вала 18 через винтовые передачи 19 передается поперечным валикам 20, а вращательное движение валиков 20 далее через винтовыепередачи 29 передается осям 28 ;.прйвода колес 21 тележки 1, осуществляя синхронный поворот всех колес 21вокруг осей 28, Возможность управления всеми колесами 21 тележки 1 позво"ляет значительно расширить...
Устройство декопова для управления манипулятором

Номер патента: 1562128
Опубликовано: 07.05.1990
Автор: Декопов
МПК: B25J 13/00, B25J 9/00
Метки: декопова, манипулятором
...17.3, подготавливая к включению реле 24, и размыкает контакт 17.4, подготавливая квключению реле 30, при этом реле 30не отключается за счет разрядуи нанего конденсатора 36 через разрядныйрезистор 35. Реле 26, включившись,размыкает контакт 26.1, подготавливаяк включению реле 30, а реле 18 размыкает контакт 18.1, подготавливая квключению реле 17 и 25, замыкает контакты 18.2 и 18.6, разряжая конденсаторы 20 и 27 через Разрядный резистор22, размыкает контакт 18.3, отключаяреле 24, замыкает контакт 18.4, подготавливая к включению реле 30, и замыкает контакт 18.5, при этом реле 18самоблокируется. Реле 24, отключившись, размыкает контакты 24.1-24,3и замыкает контакт 24.4, при этомвключается электромагнит 11 гидрозолотника 12 и рабочий...
Резонансный робот

Номер патента: 1562129
Опубликовано: 07.05.1990
Авторы: Акинфиев, Беляков, Клименко, Новогранов, Петряков, Сидорко, Стожков
МПК: B25J 9/00
Метки: резонансный, робот
...настройки за счет обеспечения независимой регулировки положения точек позиционирования.На чертеже изображена кинематическая схема робота. 1 ОРезонансный робот содержит подвижное звено 1 со схватом и приводом (непоказаны), компенсирующим потери натрение, возникающие при перемещениизвена 1 относительно основания 2 поддействием упругихэлементов 3 и 4.Дпя позиционирования звена 1 в крайнихположениях служат фиксаторы 5 и 6,установленные на основании с возможностью взаимодей .твин со звеном 1. Дпящообеспечения регулирования положенияпо крайней мере одной из точек позиционирования один из фиксаторов, например Фиксатор 5, и конец одного изупругих элементов 3 установлены на 25основании 2 с возможностью перемещения вдоль направления...
Резонансный привод

Номер патента: 1563963
Опубликовано: 15.05.1990
Автор: Гущин
МПК: B25J 9/00
Метки: привод, резонансный
...электрической 45схемой управления (не показана),Резонансный привод работает следующим образом.Одновременно с включением двигателя 1 фиксатор 9 отводится от упора 10и под действием пружин 8 и двигателя1 маховик 3 начинает раскручиваться.В этот пусковой период мощность двигателя 1 расходуется на преодолениегенерации маховика 3 и сил трения вприводе. Затем муфтой сцепления 12 с валом 2 соединяется исполнительный механизм 11. В дальнейшем, в рабочем режиме привода мощность двигателя расходуется на преодоление сил трения, При использовании в качестве двигателя 1 электродвигателя с достаточно большим пусковым моментом отпадает необходимость в муфте сцепления 12. Потребляемая мощность механизма 11, характеристика пружин 8, масса штоков 6 и...
Устройство для шагового перемещения манипулятора

Номер патента: 1563964
Опубликовано: 15.05.1990
Авторы: Диперштейн, Сахно, Флейтман
МПК: B25J 7/00, B25J 9/00
Метки: манипулятора, перемещения, шагового
...показана связь со шкивом 25 двух гибких тяг, основной 6 и допол,нительной 13, соединенных с фиксатором 8 и дополнительным Фиксатором 14, взаимодействующих с одной направляюЩей 2, 30На фиг.5 показано соединение гибких тяг 5 и 6, соединенных с фиксаторами и шкивом 4, при котором они наматываются на шкив 4 противоположными поверхностями. Устройство работает следующим об 35 разом.Двухпозиционный привод крутильных колебаний 3 возбуждает крутильные колебания шкива 4 (фиг.1), эти колеба 40 ния через гибкие тяги 5, 6 передаются фиксаторами 7, 8, Пружины 9, 10 способствуют возврату Фиксаторов в исходное положение. Синхронно с колебаниями фиксаторов 7, 8 на них посту пают импульсы электрического тока, в результате чего они, периодически...
Промышленный робот

Номер патента: 1563965
Опубликовано: 15.05.1990
Автор: Добромыслов
МПК: B25J 9/00
Метки: промышленный, робот
..."роботгидравлицеский пресс".После этого включается система управления роботом. Подъемный стол 5 корпуса 3 вместе с поворотной платформой 6 под действием штока 10, соединенного с ним через шарнир 11, силового цилиндра 9 опускается, преодолевая сопротивление пружин 8 по направляющим колонкам 7, Происходит захваг156 96 3. Робот по п,1, о т л и ча ющ и й с я тем, цто привод подъемногостола выполнен в виде силового ци линдра, размещен 1 о на колонне основания, а его шт 1 к шарнирно связан сэтим столомматериала и арматуры из накопителеи 32 и 33 механическими руками установ- . ленными в корпусах механических рук 20 и 21, и устройством загрузки материала 2 ч, После этого подъемный стол 5 корпуса 3 вместе с поворотной платформой 6 занимает...
Промышленный робот

Номер патента: 1563967
Опубликовано: 15.05.1990
Авторы: Болотин, Зиндер, Табачник, Федосеенков, Шибеко
МПК: B25J 11/00, B25J 9/00
Метки: промышленный, робот
...пружины этих механизмов,жестко закрепленные на платформе,Шарниры крепления этих гибких элементов к входному звену расположены симметрично относительно оси поворотаплатформы, в результате чего обеспечивается симметрия силовой характеристики механизмов уравновешивания.3 ил. звездочки 31, 32 таким образом, что цепи огибают направляющие звездочки соответственно с двух противоположных сторон (фиг.3) . Передаточный махнизм привода поворота платформы имеет генератор 33 волновой передачи 12, гибкое колесо 34, зубчатую передачу 35,Устройство работает следующим образом.Вал двигателя 7 приводит во вращение генератор 33 волнового редуктора 12, Выходной элемент редуктора гибкое колесо 34 приводит во вращение жестко соединенную с ним платформу 2,...
Манипулятор

Номер патента: 1565674
Опубликовано: 23.05.1990
МПК: B25J 9/00
Метки: манипулятор
...1. Вицт 35 своими Кон я чс 51:э 1 Васт;3 Вд пори Н 5 38, Оорязукцеце ( корпусом 28 полости 39 и 40.1; йк 36 ц,)7 , ст;чов,1 ец В ко,) 1) с( поср(л(ВОМ процин 4111 цт; н цс ц цо. нсти 15 и6. 22 и 2;.30 и 31, я тк)кс НО,001 И Зс и 40 оляет(.51 посНл(твом коччуЯиий 2.ЪЬПпчг 53 Ор работ;: т л 1,) ющим образом.,ге 15 эс 1 х 1 я тс рузя л 13,1 с.Н 1. рябоОй жидкстц Г 0 е;етс 51, цд ри чср, полост 39 (с 1 иг. 2). Винт 35 ол В истцем .ЯВЛЕНИ 51 ц 1 ПориЕНЬ8 В НОГ)СТИ 3, П.рс- сИ 3(се 51 ЭЛСЭО (30 Ртсжм) .ГдКи 36 и 37 эяж 3 ьх рычагов 11, олця из которых имеет левую, я втрая правую резьбы, за счет взаимолействия с винтом 35 вращаются в разных направлениях, перемеиают соответствецно закрец ленные ня них зяжимцые рычаги 11. При этом груз...
Манипулятор

Номер патента: 1569221
Опубликовано: 07.06.1990
Авторы: Агаджанова, Краснов, Малов, Мартьянов, Хакимджанов
МПК: B25J 9/00
Метки: манипулятор
...и 13 выполнены с криволинейными пазами 17. взаимодействую нимис роликами 15. На плите 13 закрепленоконическое зубчатое колесо 18, зацепляющсеся с коническими зубчать,ми колесами 19и 20. Колесо 19 связано своим валом 21через зубчато-реечную передачу 22 с исполнительным органом 1. Он представлен в видефиксатора 23 и монорельса 24 с отверстиями 25. От колеса 20 через вал 26 движение передается исполнительному органу 2,который выполнен в виде зубчатого колеса 27 и зубчатой рейки 28. Исполнитель ный орган 3 приводится в движение толкателем 29 кулачка 30. Толкатель 29 снабжен возвратной пружиной 31.Манипулятор работает следующим образом. От кулачка 6 через толкатель 7 поступательное движение сообщается плитам 10 и 11. Блок управления (не...
Манипулятор

Номер патента: 1569222
Опубликовано: 07.06.1990
Авторы: Лошкарев, Мещеряков, Постаногов, Соловьев
МПК: B25J 15/04, B25J 9/00
Метки: манипулятор
...среды (не показано) в аэрсстатицеские опоры 48 может быть любыы из известных стандартных устройств.Цепи 7 установлены на звездочках 49и 50. Звездочки 49 сыонтировань На вас 51 привода 52 перемещения цепи 7.Манипулятор работает следующим обраЗОМ.В магазин ус"ацавливается необходимый 35 комплект инструментов. Для установки необходимого инструмента подается рабочая среда, например воздух, в поршневую полость сис овсго цилиндра 38. Поршень 37, перемешаясь под действием рабочей среды, иСоком 39 сдвигает втулку 34, сжимая пружину 4 и освобождая шлицевой конец 13 вяла1. Поступающая В штоксвые по,Ости 32 рабочая среда сдвигает поршни 29 к центру силовых цилиндров 28, сжимая пружины 30 и смецая штоки 27. Последние 45 выходят из контакта со...
Манипулятор
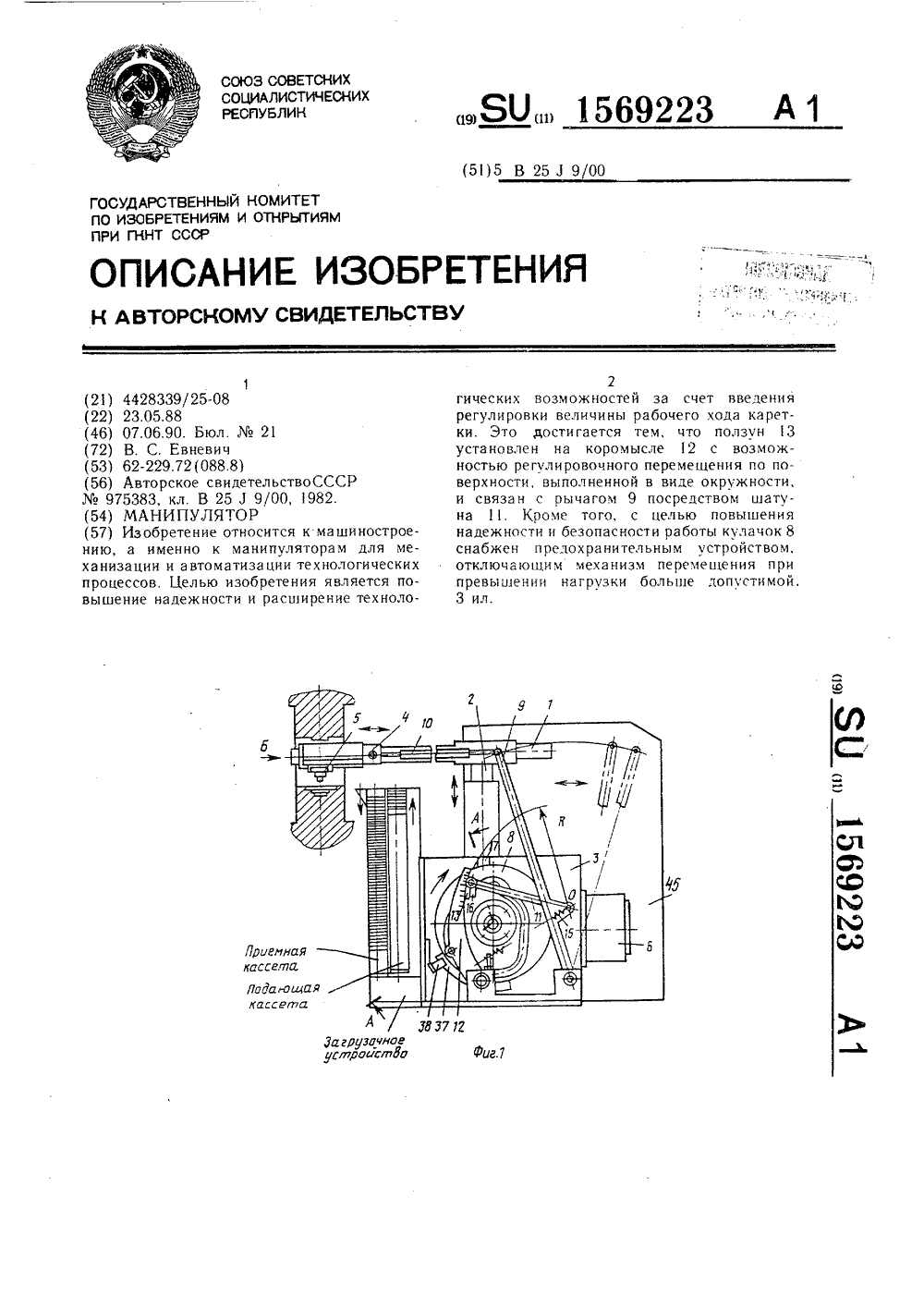
Номер патента: 1569223
Опубликовано: 07.06.1990
Автор: Евневич
МПК: B25J 9/00
Метки: манипулятор
...уорь 2,", которые установлены на втулках 26. Р осевом направлении кулачок и олумуфта 21 зафиксированы шайбой 27 с винтом 28 и стопорной шайбой 29, а также фланцем втулки 30, контактируюьсим с шайбой 31. Полумуфта 22, шайба 27 и втулка 30 зафиксировань цтиста 32 - 34,1 О 5 20 и 30 35 40 45 50 55 Редуктор 7, закрепленный в корпусе 3 и связанныч с двигателем 6, и втулка 30, установленная на выходном валу 35 редуктора 7, центрируются соосно с кулачком 8 в опоре 36. Флажок 37, взаимодействующий с датчиком 38 управления работой технологического оборудования, установлен на торце кулачка 8.Каретка 4 (фиг. 3) снабжена четырьмя верхними роликами 39 и 40, установленными попарно на осях 41, и четырьмя нижними роликами 42 и 43, установленными...
Резонансный привод промышленного робота

Номер патента: 1570892
Опубликовано: 15.06.1990
Автор: Кривовяз
МПК: B25J 9/00
Метки: привод, промышленного, резонансный, робота
...Я-го цикла), то перестановка их в заданное положение осуществляется следуюцим образом. По мере разгона потенциальная энергия аккумуляторов 5 переходит в кинетическую энергию тележки 2, следовательно, силы, с которыми они воздействуют на платформы 6, уменьшаются. В момент времени, когда эти силы равны нулю, что определяется, например, при помощи датчиков 13 деформации (растяжения - сжатия), установленных между аккумуляторами 5 и платформами 6, по команде от блока 12 подается напряжение питания па один (если х;)Х и у)1 ) или оба (если х;)Хц и у;) У ) электромагнитных тормозаО, которые через реечные передачи 9 разблокируют платформы 6 с фиксаторами 7. Тележка 2, имеющая запас кинетической энергии, через аккумуляторы 5 приводит в движение...
Резонансный манипулятор

Номер патента: 1572801
Опубликовано: 23.06.1990
Авторы: Политов, Серов, Чернов
МПК: B25J 9/00
Метки: манипулятор, резонансный
...М у штоком 6 и цилиндром 2 установ О л н упругий элемент (пружина) 8, а к рпус 1 механической руки через шар н р 9. связан с основанием. Кроме того, н гидроцилиндре установлен датчик 10 п ложения штока 6, а на корпусе 1 - 25 д тчик 11 знака скорости перемещения механической руки, при этом шарниры 7 и 9 расположены по оси силовогоиндра и механической руки при нейтральном положении этой руки (точка А).Манипулятор работает следующим образом.Первоначально корпус 1 механичесКой руки находится в положении точКи В и Фиксируется запертой в полости цилиндра 2 жидкостью. При этом 1 ружина 8 растянута, поршень со штоком выдвинут до упора в крышку гидроцилиндра 1, Усилию пружины 8, стре мящийся вернуть корпус 1 в среднее положение (точка А),...
Привод шагового перемещения

Номер патента: 1574449
Опубликовано: 30.06.1990
Авторы: Запольский, Несоленый, Хмельковский
МПК: B25J 9/00
Метки: перемещения, привод, шагового
...преодолаваяусилие пружины 19, На платформе 3установлен управляемый фиксатор 20с пневмоцилиндром 21 и возвратнойпружиной 22, Фиксатор 20 установлентак, что при его выдвижении он взаимодействует с упорами 5, при этомплоскость поворота Фиксатора 17 или18 (в зависимости от направления движения) находится в плоскости расположения упоров 5 и фиксатора 20.Для холостого перемещения манипулятора 1 может использоваться тради,ционный привод, состоящий, например,иэ асинхронного электродвигателя 23,соединенного муфтой 24 с редуктором 25 и цепной передачей.26 с осью 27 колес 7. При изменении направления шагового перемещения платформы 3 происходит поворот вала 28, на котором установлены фиксаторы 17 и 18, с помоцью привода 29.Для обеспечения точности...
Автооператор

Номер патента: 1576271
Опубликовано: 07.07.1990
Авторы: Кряжев, Фортунатов
МПК: B23Q 7/04, B25J 9/00
Метки: автооператор
...рычага 16 и вращения вместе с осью 23 за счет фиксатора 30, взаимодействующего с пазом 32 оси 23. На захвате 18 установлен пневмоцилиндр 33, который штоком связан с подвижной губкой 34 захвата 18, имеющей в верхней части регулируемый упор 35, а в нижней - базирующее отверстие диаметром, равным наименьшему диаметру конца детали 36 (заготовки). Подвижная губка 34 установлена на направляющих 31. Для обеспечения работы автооператора со стержне- образными деталями 36 различной длины неподвижная губка 37 захвата 18 может устанавливаться в любом месте направляю 5 10 15 20 25 30 35 40 45 50 55 щих 31 и затем крепиться винтами 38. Фиксатор 30 снабжен пружинами 39, с помощью которых выходит из контакта с пазом 32 оси 23, и имеет ролик 40 для...
Промышленный робот

Номер патента: 1576303
Опубликовано: 07.07.1990
Авторы: Бердник, Болтышев, Захаров, Паршин
МПК: B25J 9/00
Метки: промышленный, робот
...каждой пары ЭПМ 11 - 13, Датчики обратной связи по положению и скорости перемецения звена 4 установлены на последнем в районе оси его вращения и кинематически связаны со звеном 3, Фиксируя относительные перемещения и скорость звеньев 3 и 4 друг относительно друга, Аналогичные датчики (ими могут быть, например, соответственно переменный резистор типа ППМЛ и тахогенератор серии ТХЛ) установлены на звене 3, Фиксируя параметры его перемещения относительно оси 9 (фиг, 2), жестко соединенной с основанием 2. Положение и скорость вращения основания 2 Фикси. руются аналогичными датчиками, установленными на нем и кинематически взаимодействующими с неподвижным зубчатым колесом 7.1Управление ЭП 11, входящими в каждую пару, осуществляется с...