B25J 9/00 — Манипуляторы с программным управлением
Портал промышленного робота

Номер патента: 1135637
Опубликовано: 23.01.1985
Авторы: Бабич, Голышков, Савельев, Смирнов, Сташков
МПК: B25J 9/00
Метки: портал, промышленного, робота
...на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 1; на фиг, 7 - разрез Е-Е на фиг. 1; на фиг. Ь - разрез Ж-Ж на фиг. 3; на фиг. 9 - разрез 3-3 на фиг. 4; на фиг. 10 - кинематическая схема связи поперечной балки с каретками продольных.направляющих; на фиг. 11 - вариант установки продольных направляющих на опорах различной высоты; на фиг. 12 - вариант установки направляющих в случае наклона направляющих в разные стороны в вертикальной плоскости; на фиг, 13 - вариант установки направляющих в случае их не- параллельности в горизонтальной плоскости; на фиг. 14 - вариант установки направляющих в случае непараллельности опор в вертикальной плоскости; на фиг. 15 - вариант установки направляющих в случае. наклона направляющих в одну сторону в...
Манипулирующее устройство к автоматическим линиям

Номер патента: 1136934
Опубликовано: 30.01.1985
Авторы: Белая, Каширин, Махлярчук, Соболев, Суворов
МПК: B25J 9/00
Метки: автоматическим, линиям, манипулирующее
...вал 2 с механической рукой 3, ры чажно-кулачковый механизм 4, меха-низм 5 распределения деталей, меха. ,ниэм 6 транспортирования кассет,Механическая рука выполнена ввиде каретки 9 с пружинными захватами 10, количество которых равно количеству рядов в кассете 11, и фиксатора 12 положения каретки.Каретка соединена гибким валом13, заключенным в броневой кожух 14,с ползушкой 15 механизма 5 распределения деталей, установленной внаправляющих 16, жестко закрепленных :на валу 2. На нижнем конце ползушки имеется ролик 17, взаимодействующий с упором 8 и кулачком 7.Каждый захват 10 каретки 9 выполнен пружинным и снабжен упором 18для раскрытия захватов при взаимодействии их с упором 19, установленным на станине или на линии сборкиили...
Портальный манипулятор

Номер патента: 1139622
Опубликовано: 15.02.1985
Авторы: Киселев, Моргунов, Печерский, Родин, Старошкловский
МПК: B25J 9/00
Метки: манипулятор, портальный
...6 линейного электродвигателя привода перемещения каретки с вторичным элементом в видеплоской немагнитной электропровод"ной шины 7, смонтированной на нижнем основании направляющего элемента 3. На боковых противоположныхстенках каретки установлены под углом к вертикали два грузоподъемныхсхвата с линейными электродвигателями, каждый из которых содержит цилиндрический индуктор 8, коаксиальнокоторому располагается вторичный элемент - бегун 9, Поверхностный слойбегунов представляет собой анизотропную структуру, состоящую из стальныхи медных шайб, насаженных на стерженьиз Ферромагнитного материала. На нижних концах бегунов 9 установленысхваты, каждый из которых выполненв виде грузоподъемной электромагнитной призмы 10, содержащей постоянный...
Промышленный робот

Номер патента: 1142270
Опубликовано: 28.02.1985
Авторы: Бабушкин, Карпов, Миронов, Солгалов
МПК: B25J 9/00
Метки: промышленный, робот
...звеньев 3, 4 и 5 руки промышленного робота и поворот колонны 2 может производиться как одновременно всеми электроприводами, так и последовательно каждым в отдельности.Отработка заданных углов поворота звеньев 3, 4 и 5 контролируется датчиками ровать их переходные процессы, увеличить скорость перемещения подвижных звеньев робота и его производительность. Разгрузка передач приводов телескопическими устройствами увеличивает долговечность работы передач, улучшает стабильность точностных характеристик робота и устойчивость положения звеньев руки робота при позиционировании.На фиг. 1 изображена общая конструкция промышленного робота; на фиг. 2 - кинематическая схема промышленного робота.Промышленный робот содержит основание 1 с размещенной на...
Манипулятор

Номер патента: 1144875
Опубликовано: 15.03.1985
Автор: Али-Заде
МПК: B25J 9/00
Метки: манипулятор
...установлены так, что мгновенные и постоянные оси вращения звеньев пересекаются в одной точке, образуя сферический механизм.На чертеже показана кинематическая схема промышленного робота,Промышленный робот содержит опору 1, поворотную колонну 2, привод вращения 3 поворотной колонны с жестко насаженным на ней основанием 4, образованным тремя вращательными парами 5, 6 и 7 рычажных звеньев 8, 9 и 1 О, соединенных с соответствующими тремя приводами 11, 12 и 13. Платформа 14 с тремя вращательными парами 15, 16 и 17 соединена с основанием 4 через звенья 8, 9 и 10, через вращательные пары 18, 19 и 20 с тремя поводками 21, 22 и 23.Основание 4, рычажные звенья 8, 9 и 10, поводки 21, 22 и 23, платформа 14 и вращательные кинематические пары 5,...
Манипулирующее устройство

Номер патента: 1146194
Опубликовано: 23.03.1985
Автор: Смирнов
МПК: B25J 9/00
Метки: манипулирующее
...в виде половины Т-образного паза. Для поворота шпинделя 2, а вместе с ним площадки 3 служит двухсторонний цилиндр 18, перемещающий, шток-рейку 9, находящуюся в зацеплении с зубчатым колесом 20. В кинематическую цепь поворота введен фиксатор 21, являющийся поршнем цилиндра 22. Положения штоков силовых цилиндров при выполнении различных операций сдеталью 23 контролируются конечными выключателями 24 и 25. Манипулирующее устройство работает следующим образом,Для захвата детали 23, которую необходимо перенести в зажимное многоместное приспособление (фиг. 5) с последующей перекладкой детали из позиции а в позиции в, с, с 1, оси захватных головок 4 и 5 располагаются на наименьшем расстоянии от осей отверстий 13 и 14 на диске 11 с...
Рука манипулятора

Номер патента: 1151447
Опубликовано: 23.04.1985
Авторы: Бабич, Савельев, Смирнов
МПК: B25J 9/00
Метки: манипулятора, рука
...- упрощение про граммы управления манипулятором путем кинематической развязки ориентирующих степеней подвижности.На чертеже представлена кинематическая схема двухсторонней руки. 10Рука содержит корпус 1, на торец которого установлен волновой редук" тор 2 вращения кисти, содержащий жесткое колесо 3, жестко связанное с корпусом 1, гибкое колесо 4 и ге нератор 5 волн, На гибком колесе 4 закреплена кисть 6, состоящая из корпуса 7, в который встроен воьновик 8 качания схвата, жесткое колесо 9 которого жестко связано с корпусом 20 7, а на гибком колесе 10 установлен схват 11. Генератор 12 сидит на оси 13, на которой жестко закреплено коническое колесо 14, входящее в зацепление с коническим колесом 15, уста новленным на валу 16,...
Привод промышленного робота

Номер патента: 1151448
Опубликовано: 23.04.1985
Авторы: Гейдаров, Керимов, Фархадов
МПК: B25J 9/00
Метки: привод, промышленного, робота
...на О дежности работы привода.Цель достигается тем, что привод промышленного робота, содержащий силовой цилиндр, тормозное устройство и регулируемые упоры с винтовым 15 механизмом, снабжен подпружиненным стержнем и дополнительной винтовой парой, винт которой закреплен на корпусе тормозного устройства, а на гайке этой винтовой нары размещен 2 О один иэ датчиков, нри этом другой датчик размещен на корпусе силового цилиндра, а стержень установлен в этом корпусе с воэможностью его взаимодействия одним концом со што ком тормозного устройства, а другим концом - с датчиками.На чертеже схематически изображено предлагаемое устройство.Привод промьвнлецного робота со- Зр держит силовой цилиндр 1, тормозное устройство 2, шток 3 которого совмещен...
Автоматический манипулятор с цикловым управлением

Номер патента: 1151449
Опубликовано: 23.04.1985
Авторы: Болотин, Корендясев, Саламандра, Тывес
МПК: B25J 9/00
Метки: автоматический, манипулятор, управлением, цикловым
...с соответствующими упорамииксаторами, неподвижные контакты соединень: с источником стабилизированного напряжения, а подвижный и один из неподвижных контактов - с двигателем постоянного тока.На фиг, 1 представлена кинематическая схема манипулятора; на Лиг,2 принципиальная схема установки потенциометра и его электрического соединения с источником питания идвигателем.Манипулятор содержит цепь шарнирно соединенных с основанием 1 и между собой звеньев 2-4, приводные це пи 5-7, выполненные в виде гибкихзвеньев, например тросов, индивидуальные днигатели 8-10 постоянного тока звеньев 2-4 соответственно, на выходных валах которых закреплены ролики 11 и штанги 12, На штанге 12 с возможностью регулирования положения установлена вилка 13....
Промышленный робот

Номер патента: 1155334
Опубликовано: 15.05.1985
Автор: Петров
МПК: B21D 43/00, B25J 9/00, B30B 15/30 ...
Метки: промышленный, робот
...выполнен в виде позицнонера с промежуточной точкой, которая обеспечивается дополнительным 34 2штоком 29, имеющим ход, почти наполовину меньший хода шток-рейки 25.Установка положения траверсы 3 ввертикальной плоскости производится регулировкой длины тяги 14 с помощью талрепа 17. При увеличениидлины тяги 14 рычаги 8 опускаютсяи высота расположения траверсы 3относительно стола пресса уменьшается. При уменьшении длины тяги 14 рычаги 8 поднимаются, и высота расположения траверсы 3 увеличивается. Регулировкой длины тяги 15с помощью талрепа 16 производитсяустановка траверсы 3 н горизонтальной плоскости, т,е, опредепяетсяпараллельность ее относительно стола пресса. Пневмоцилиндр 13 вертикального перемещения - односторонней с возвратной...
Промышленный робот модульного типа

Номер патента: 1158344
Опубликовано: 30.05.1985
Авторы: Бакалов, Зайцев, Панкратов
МПК: B25J 17/00, B25J 9/00
Метки: модульного, промышленный, робот, типа
...стыковочного фланца 17 закреплены один или несколько идентичных модулей кисти 18 с модулями схвата 19, снабженный приводами продольного перемещения, причем модули кистИ сориентированы в одном направлении. Все модули промышленного робота связаны с автоматической системой управления (не показано),Промышленный робот модульного типа обслуживает технологическое оборудование и обеспечивает, например, подачу из технологической тары 20, заготовки 21 в зону действия зажимного устройства 22 токарного станка.Промышленный робот модульного типа работает следующим образом.Промышленный робот установлен у токарного станка.В исходном положении модуль руки 13 расположен горизонтально и модуль схвата 19 находится над технологической тарой 20 с...
Устройство для переноса заготовок между позициями обрабатывающей машины

Номер патента: 1162534
Опубликовано: 23.06.1985
Авторы: Ермаков, Михеев, Пашков, Ползиков, Шевченко
МПК: B21D 43/00, B21J 13/08, B25J 9/00 ...
Метки: заготовок, между, обрабатывающей, переноса, позициями
...1. Внутри гильзы установлен вал 12, на котором установлено вращающееся уплотнительное соединение 13. Вал 12 связан кинематически с валом 5 тросами 14 и удерживается от поворота вилкой 15, закрепленной на корпусе 11 винтами 16. На гильзе 9 на конической шейке установлено зубчатое колесо 17, входящее в зацепление с рейкой 3, В корпусе 6 установлен фиксирующий винт 18. Захватный орган 4 соединен штоком 19 с поршнем 20 пневмоцилиндра 7. На штоке 19 установлена пружина сжатия 21. Привод вращения рук закрыт кожухом 22. Механизм перек разъема штампа.Без дополнительного вращения схвата механизм перекладки работает сле" 40 дующим образом (фиг, 2 и 4),Винт 18 вводится в тело ва- "ла 5 и препятствует его враще-нию относительно корпуса 6, авилка...
Модуль движения робота
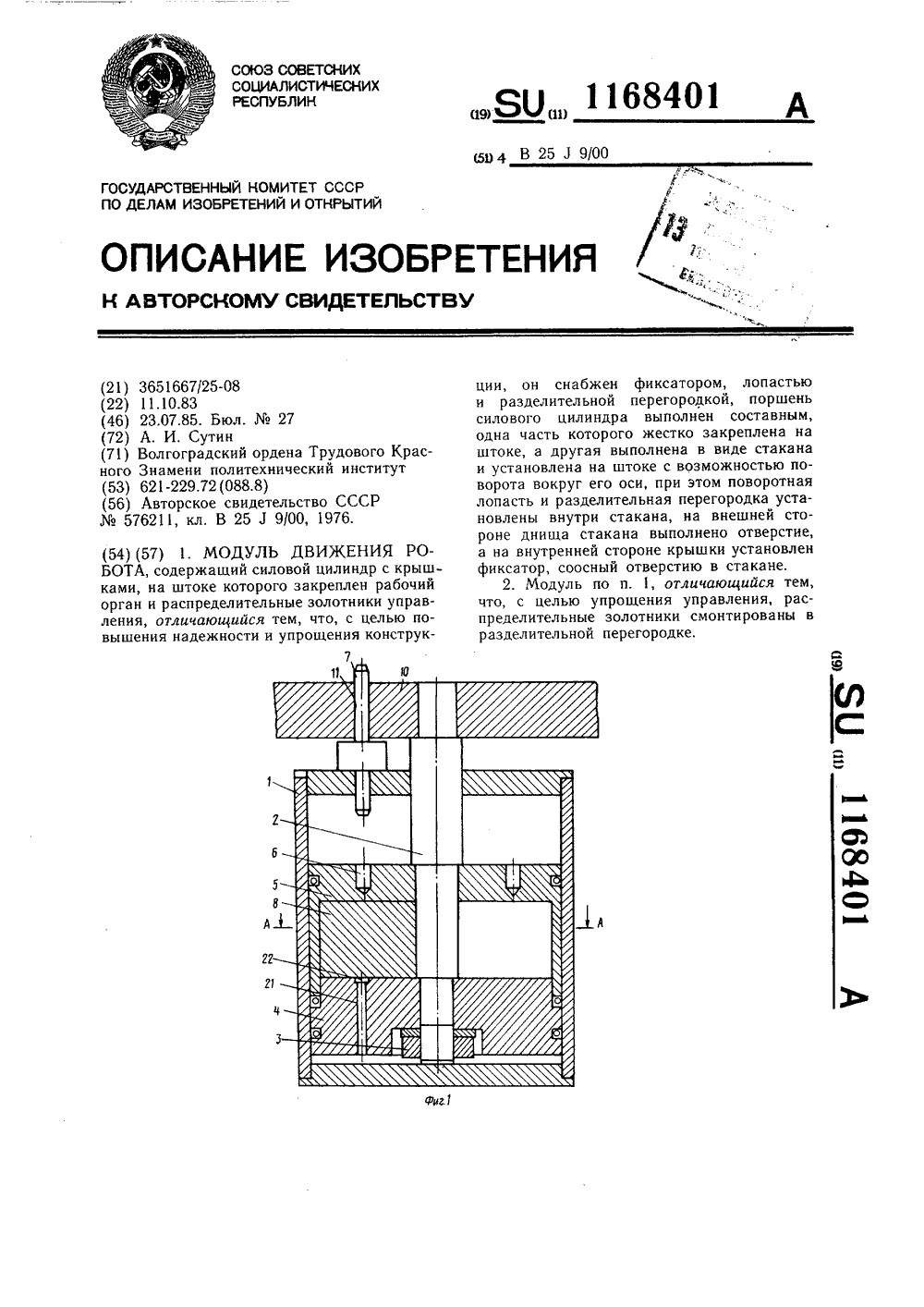
Номер патента: 1168401
Опубликовано: 23.07.1985
Автор: Сутин
МПК: B25J 9/00
Метки: движения, модуль, робота
...клапан 20 служат для отвода рабочего тела из полости 16. Канал 21 в теле поршня 4 и полукольцевая канавка 22 на торце поршня 4 обеспечивают сообщение нижней полости цилиндра 1 с полостью 16 стакана, как при повороте лопасти 9, так и при повороте разделителя 8. Канал 23 служит для подвода рабочего тела из верхней полости цилиндра 1 в полость 17 стакана 5. Канал 24 и обратный клапан 25 служат для отвода рабочего тела из полости 17,Модуль движения робота работает следующим образом.Исходным является положение, когда поршень 4 и рабочий орган 10 находятся в нижнем положении. При этом фиксатор 7 находится в отверстии 11 рабочего органа 10 и удерживает последний от проворота. При подаче рабочего тела в нижнюю полость цилиндра 1...
Устройство для управления промышленным роботом
Номер патента: 1170428
Опубликовано: 30.07.1985
Авторы: Коломенцев, Кузнецов, Фурман
МПК: B25J 9/00, G05B 19/00
Метки: промышленным, роботом
...7, второй усилитель 8, 20привод 9 радиального перемещения,второй датчик 10 положения, датчик 11момента, датчик 12 ускорения, блок 13вычисления массы, дифференциатор 14,выпрямитель 15, ждущий мультивибратор 2516, блок 17 выборки-запоминания..т,Блок вычисления массы (Иг.2)включает первый делитель 18, первый19 и второй 20 квадраторы, сумматор21 и второй делитель 22, 30На Фиг.З указаны функциональныйблок 23, суюатор 24, делитель 25 иблок 6 фиксации уровня,Устройство работает следующим образом.В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы;.на первом его выходе появится сигнал, соответствующий требуемому перемещению привода 40 5 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от...
Резонансная механическая рука

Номер патента: 1171306
Опубликовано: 07.08.1985
Авторы: Акинфиев, Асташев, Фролов
МПК: B25J 9/00
Метки: механическая, резонансная, рука
...энергия пружины 3переходит в кинетическую энергиюзвена 2 и жестко связанного с нимфиксатором 8 звена 7, что обеспечивает интенсивный разгон звеньев, Посигналу одного из датчиков 11, кото-рый первый взаимодействует со звеном,фиксатор 8 расцепляется и под действием пружины 13 начинается интенсивноеперемещение звена 7 относительнозвена 2, причем .перед началом этогодвижения звено 7 уже обладает запасом кинетической энергии. После того,как подвижные звенья пройдут черезсредние положения, их кинетическаяэнергия будет переходить в потенциальную энергию пружин 3 и 13, что обеспечит их интенсивное торможение.Вблизи крайних положений звеньев,когда их скорости близки к нулю,фиксаторы 4 и 9 войдут в зацеплениеи зафиксируют звенья,...
Манипулятор

Номер патента: 1171307
Опубликовано: 07.08.1985
Авторы: Пономарев, Ханмамедов, Шваченко
МПК: B25J 9/00
Метки: манипулятор
...вырабатывают сигналы, соответствующие мгновенному значению направления усилияв звеньях 1-3 соответственно, Этисигналы поступают в управляющееустройство (не показано), напримерэлектронно-вычислительную машину(ЭВМ). ЭВМ определяет по заданнойпрограмме, какие звенья и в какомнаправлении должны быть повернуты,чтобы схват 8 переместился в заданную точку рабочего пространства манипулятора,Например, звено 3 со схватом 8 должно переместиться относительно основания 9 вверх, а затем звено 2 должно повернуться в шарнире 5 вокруг вертикальной оси, т.е, конец звена 2 должен переместиться в горизонтальной плоскости. В момент приб. лижения направления динамического усилия, действующего на звено 3, к вертикали срабатывает датчик 12 и ЭВМ подает...
Рука промышленного робота

Номер патента: 1174255
Опубликовано: 23.08.1985
Авторы: Аксенов, Камсков, Худяков, Чапинский
МПК: B25J 9/00
Метки: промышленного, робота, рука
...гидроцилиндром схвата 12 и с гидромотором 6.Гидравлическая схема приводов ориентирующих движений кисти выполнена по принципу дистанционной передачи силового потока, 40Приводы качания и вращения кисти содержат однотипные блоки управления движением качания и движением вращения.Блоки 2 и 3 управления, представляюц 1 ие собой электрогидравлические шаговые приводы,содержат задающий шаговый двигатель 13, связанный через винтовую передачу 14 с распределителем 15, задающий гидромотор 16, связанный с распределителем 15 механической обратной связью по углу поворота. Однако, например правая, рабочая полость задающего гидромотора 16 подключена посредством магистрали 17 к одномувыходному каналу распределителя 15, дру.гая, левая, полость задающего...
Манипулятор

Номер патента: 1186464
Опубликовано: 23.10.1985
Автор: Снисарь
МПК: B25J 9/00
Метки: манипулятор
...при этом одназвездочка 8 жестко связана с зубчатым колесом 7 приводной зубчато-реечной передачи,а другая звездочка 9 жестко связана с кривошипом 1 О кулисного механизма. Междусобой звездочки 8 и 9 связаны цепью 11.Звено 12 параллелограммного механизмажестко связано с зубчатым колесом 7 приводной зубчато-реечной передачи, а звено13 параллелограммного механизма - сзвездочкой 9 цепной передачи. Ползун 14установлен в прямолинейной кулисе 15, причем кривошип 10 установлен в ползуне срегулируемым радиусом. Манипулятор имеетдополнительную зубчато-реечную передачу,рейка 16 которой жестко связана с кулисой15 с одной стороны и с штоком цилиндра 17уравновешивающего механизма.Корпус цилиндра 17 урвановешивающегомеханизма жестко связан с подвижной...
Манипулятор

Номер патента: 1187982
Опубликовано: 30.10.1985
Авторы: Бодров, Калинин, Решетников, Трофимов
МПК: B25J 9/00
Метки: манипулятор
...относительно захватываемого объекта.На фиг. 1 дан манипулятор, общий вид; на фиг2 - схема центрирован- ного захвата детали; на фиг. 3 - 15 структурная схема управления и питания манипулятора.Рука 1 манипулятора соединена через узел 2 поворота со схватом, содержащим четыре Ш-образных сердечни ка 3-6, закрепленных на плите 7 на нижней ее поверхности по углам. Плита 7 выполнена из дюралюминия для уменьшения веса манипулятора и нагрузки на руку 1, Датчик 8 угла по ворота закреплен на руке. На каждом иэ Ш-образных сердечников расположены обмотки 9-16. Обмотки каждого сердечника соединены с соответствующей парой резисторов 17-24 по мостовой З 0 схеме, одни диагонали этих схем подключены к соответствующим входам блоков 25-28 сравнения, а...
Привод поворота исполнительного органа промышленного робота

Номер патента: 1189551
Опубликовано: 07.11.1985
Автор: Натбиладзе
МПК: B21D 43/00, B25J 9/00
Метки: исполнительного, органа, поворота, привод, промышленного, робота
...А-А нафиг. 2,Механическая рука 1 закрепленана валу 2, имеющем шестерню 3, находящуюся в зацеплении с рейкой 4.Последняя своими концами связанас поршнями 5 силовых цилиндров 6,которые соосно размещены в дополнительных цилиндрах 7 с возможностьювозвратно-поступательного регулировочного перемещения, В дополнительных цилиндрах 7 установлены поршни 8со штоком 9, своими концами размещенными в полостях силовых цилиндров 6с возможностью взаимодействия с поршнями 5, В крышке 10 дополнительных цилиндров 7 установлены регулировочные упоры, выполненные в видевинтов 11, ввернутых с возможностьювзаимодействия с поршнями 8. Дополнительный цилиндр 7 фиксируется относительно силового цилиндра 6 гайкой 12,Силовые и дополнительные цилиндры 5 и 7...
Промышленный робот

Номер патента: 1191279
Опубликовано: 15.11.1985
Авторы: Гут, Хаймов, Шафранский
МПК: B25J 9/00
Метки: промышленный, робот
...Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д, 4/5 филиал ППП "Патент", г, Ужгород, ул. Проектная, 4 1 ф 119Изобретение относится к средствам автоматизации процессов, связанных с обработкой, контролем и упаковкой штучных изделий, и может быть применено в различных отраслях прокапленности,Цель изобретения - упрощение конструкции робота.На чертеже схематически изображен предлагаемый робот, 1 ОНа основании 1 размещены последова тельно связанные между собой подвижные звенья, в виде вращающейся план- шайбы 2 и линейно перемещающихся стойки Зи руки 4 сзахватным устройством. 1 5. Привод каждого подвижного звена выполнен в виде двух силовых цилиндров 6 и 7, на штоках которых установ лены...
Манипулятор

Номер патента: 1192969
Опубликовано: 23.11.1985
Автор: Снисарь
МПК: B25J 9/00
Метки: манипулятор
...операций по обработке и сборке деталей методом вращения, например обработка изделий рерлом, фрезой, выполкение опе 15 аци 6 внинчивания, закручивания различных деталей:,и т,д.Цепь изобретения -" Расширение технолоГИческих воэможностей манипулятора с высокой грузоподъемностью путем сообщения руке вращательного движения.На чертеже изображена кинематическая схема манипулятора.Манипулятор содержит корпус 1, на котором установлен привод 2 механизма плоско-параллельного перемещения. руки. Вал 3 смонтирован внутри гори зонтального .звена 4 шарнирного параллелограммного механизма, содержащего звенья 5 и 6 и неподвижную стойку 7. Этот механизм кинематически связан с приводом 2 с помощью шес- р 5 терни 8, закрепленной на стойке 7,...
Способ пространственной ориентации кисти манипулятора

Номер патента: 1194670
Опубликовано: 30.11.1985
Авторы: Путов, Сибирцев, Солдатенко
МПК: B25J 9/00
Метки: кисти, манипулятора, ориентации, пространственной
...точности пространственной ориентации за счет определения положения основания относительно горизонта.На чертеже изображена схематическая проекция руки манипулятора.Рука манипулятора состоит из плеча 1, предплечья 2, кисти 3 и основания 4 с осями координат ОХУ 2, В данной проекции горизонтальная плоскость основания наклонена под углом Ы к горизонту, угол тангажа. Данный угол определяют с помощью датчика положения по ФормулеКОЙ науч В другой Фронтальной проекции руки манипулятора будет аналогичный чертеж с углом наклона ф к горизонтукоторый называется углом крена и определяется каккон апач 1 где кои фниц, 0,ц Мц - начальные и конечные углы датчиков положения, измеряющие обобщенные координаты по двум степеням свободы кисти или...
Рука манипулятора ее варианты

Номер патента: 1199608
Опубликовано: 23.12.1985
Авторы: Бабич, Савельев, Смирнов
МПК: B25J 9/00
Метки: варианты, манипулятора, рука
...(первый вариант), на фиг. 3 - кинематическая схемаруки манипулятора с тремя степенями подвижности (второй вариант).По первому варианту рука манипулятора (фиг, 1) содержит волновые редукторы 1 и 2 с двигателями 3 и 4, Волновые редукторы включают в себя генераторы 5 волн, гибкие колеса 6 и жесткие колеса 7, причем генераторы 5 волн связаны с валами двигателей 3 и 4, а жесткое колесо редуктора 1 установлено в . подшипниках 8 основания 9, при этом жесткое колесо редуктора 2 закреплено на основании.На жестком колесе волнового редуктора 1 закреплено зубчатое колесо 10, связанное с жестким колесом посредством полого вала 11, а с гибким 2колесом волнового редуктора 2 жесткосвязаны зубчатые колеса 12 и 13.Шестерня 13 находится в зацеплении...
Промышленный робот

Номер патента: 1199609
Опубликовано: 23.12.1985
Автор: Бурков
МПК: B25J 9/00
Метки: промышленный, робот
...винтовых передач (фиг. 1). Однако этот механизм может быть выполнен в простейшем случае в виде регулировочных прокладок, а в более сложных роботах - в виде цилиндра или иного управляемого приводного механизма.Эластичный рукав с одной стороны герметично заглушен пробкой 15, а с другой стороны к нему подводится рабочая среда (газ, сжатый воздух или жидкость) под давлением, величина которого регулируется редукционным клапаном 16, снабженным приводом 17. Расход рабочей среды регулируетося регулятором потока или дросселем 18, снабженным приводом 19. Направление движения рабочей среды регулируется распределителем 20, снабженным приводом 21.Для повышения эффективности торможения на каретке установлены тормозные колодки 22,Перед началом...
Манипулятор

Номер патента: 1207751
Опубликовано: 30.01.1986
Авторы: Вишневский, Первушин, Рыбаков
МПК: B25J 9/00
Метки: манипулятор
...вид. на фиг, 2 сечение А"Ана фиг. 1.Манипулятор содержит вал 1 одинконец которого связан с приводом(не показан) а на другом установлена штанга 2 с захватным элементом 3,который в зоне выгрузки контактируетао сбрасывателем 4, выполненным ввиде пластины на опорах 5, рабочаяповерхность которой находится науровне рабочей поверхности захватногоэлемента. В зоне движения штанги 2установлен смачиватель 6, выполненный в виде сосуда 7 для смачивающейжидкости с дозатором 8 и гигроскопической прокладкой 9, а также питатель10 с деталями 11, Детали укладываютна транапортерную ленту 12.,Манипулятор работает следующим образом,Бал 1 со штангой и захватным элементом 3 через привод получает воз= вратно-поступательное вращение, Ксгда вал 1 находится в...
Механизм позиционирования

Номер патента: 1207752
Опубликовано: 30.01.1986
Автор: Ачкасов
МПК: B25J 9/00
Метки: механизм, позиционирования
...окончательноестопорение производится при полнойзатяжке винтов 10,Осевые перемещения блока упоров ограничены гайками 11 и 12, причем под действием пружины 13 блок стремится сместиться вправо, так чтомежду правой планкой 4 и гайкой 11 образуется зазор Ь , На пути упоров- гаек 6 расположен жесткий упор 14, выполненный в виде поворотного рычага, ось которого связана с неподвижной станиной 2, Жесткий упор 14 может поворачиваться под действием цилиндра 15, занимая верхнее или нижнее положение.Жесткий упор 14 установлен с возможностью пересечения пути упоров- гаек 6 во время их перемещения вместе с рабочим органом - кареткой 3,В верхнем положении жесткого упора 14 упоры-гайки 6 могут свободно проходить, не взаимодействуя с ним.Винт 5 снабжен...
Линейный модуль манипулятора

Номер патента: 1207753
Опубликовано: 30.01.1986
Авторы: Башкирова, Мелеховец, Шабрихин
МПК: B25J 9/00
Метки: линейный, манипулятора, модуль
...закреплены концы двухстороннего штока 21 пневмоцилиндра8, подвижный корпус которого имеетпостоянный рабочий ход Ь и снабженвнутренним тормозным устройством,На корпусе 22 пневмоцилиндра 8,5 10 15 20 25 30 35 40 45 50 55 являющемся выходным звеном приводя;закреплена каретка 23, снабженнаяпарой регулируемых с помощью винтов24 и 25 опор 26 и 27 скольжения;контактирующих с направляющими 2 и3 скольжения, Реэьбовые штанги 4 и5 закреплены в торцовых крышках 28корпуса 1 с помощью натяжных гаек 29Линейный модуль манипулятораработает следующим образом,Б исходном положении (перваяточка позиционирования) пневмоцилиндры 6, 7 и 8 (фиг. 2) находятся в крайнем левом положении, причем положение каретки 23 определяется положением корпуса...
Манипулятор тенгиза

Номер патента: 1212780
Опубликовано: 23.02.1986
Автор: Хомерики
МПК: B25J 9/00
Метки: манипулятор, тенгиза
...переходной фланец 4, образующие механическую руку, Модуль 2 вращения включает два каркаса - внешний 5 и внутренний 6, соединенные между собой двуслойными пластинами 7 с разным коэффициентом линейного вращения. Причем внешний каркас 5 образован из двух фланцев 8 и 9 стерж. ней 10, причем фланец 9 выполнен с отверстием для размещения внутреннего каркаса 6, а фланец 8 служит для соединения модулей между собой, Внутренний каркас 6 образован двумя фланцами 11 и 12 и стерж нями 13, причем фланец 12 служит для соединения модулей между собой, Двуслойные пластины 7 крепятся к соответствующим стержням 10 и 13 каркасов 5 и 6. Модуль закрывается кожухом 14, Электропитание к двухслойным пластинам осуществляется при помощи проводов 15.Модуль 8...
Исполнительный механизм манипулятора

Номер патента: 1215993
Опубликовано: 07.03.1986
Автор: Даровских
МПК: B25J 11/00, B25J 9/00
Метки: исполнительный, манипулятора, механизм
...Исполнительный механизм манипулятора работает следующим образом.В исходное для начала цикла положение механизм выносится рукой манипулятора. В дальнейшем срабатывает по сигналам системы управления (не показана) двигатель 20. Вал 7, связанный с двигателем 20, вращается в опорах 9 и 10, увлекая за собой сектор 1. При этом во вращение приходит и сектор 2 с валом 8 относительно опор 11 и 12. Плечи 3 - 6 двуплечих рычагов, закрепленные на ступицах секторов 1 и 2, также движутся, по криволинейным траекториям. Зажимные губки 23 плеч 3 и 5 поокончании углового перемещения секторов 1и 2 производят зажим базовой детали 26в устройстве 24 выдачи, а захватные элементы 22 плеч 4 и 6 ориентируются относительно деталей 27, расположенных в устройствах...