Новогранов
Устройство для имитации модуля поворота

Номер патента: 1705063
Опубликовано: 15.01.1992
Авторы: Галкин, Кропотин, Левин, Новогранов, Степанов
МПК: B25J 11/00, B25J 19/00
Метки: имитации, модуля, поворота
...этого звена, Колебания упругой штанги 9 с наборными Грузами 10 имитируют колебания мэнипулягора, вызванные наличем изгибной жидкости, При вращении элек" тродвигател 1 в конструкции устройства воги(икают вынужденные механические ко 3(сбания инерционного звена с наборными груз; мц Б и 10, определяемые собствен (л( Частотами упругих элементов. Гобственные частоты зависят от следующих Факторов: материалов и геометрических размеров гибкого колеса волнового редуктора 5 и упругой штанги 9, а также количества наборных грузов 8 и 1 рузов 10 инерционного зве" на, Для создания статицеских нагрузок, ИЛ(ИТИРУ(В,:с(Х ВЯЗКОЕ ТРЕНИЕ КЦЦСЛ(а ГЦЕ- ской цецц манипулятора, служиг электромагнцг.)й тоомоз /, развиваемый тормозной момент котсрого создается...
Система управления

Номер патента: 1575151
Опубликовано: 30.06.1990
Авторы: Акинфиев, Новогранов, Степанов
МПК: G05B 11/01
...вход элемента сравнения 3 поступает сигнал с выхода блока деления 13. В соответствии с разностью поступивших сигналов элемент сравнения 3 вырабатывает управляющее напряжение дляэлектродвигателя 5, которое усиливается усилителем ч. Сигнал с выхода усилителя поступает в якорную цепь электродвигателя 5, который через редуктор 7 приводит в действие объект регулирования 8, Сигнал, соответствующий текущей скорости электродвигателя 5, через датчик скорости 6 поступает на первый вход блока деления 13. На второй вход блока деления13 поступает сигнал с выхода блокавыделения модуля сигнала 12 и опорное напряжение 0 э для исключения дополнительный усилитель 11 и датчик тока 10 поступает сигнал из якорнойцепи электродвигателя 5 пропорциональный току...
Резонансный робот

Номер патента: 1562129
Опубликовано: 07.05.1990
Авторы: Акинфиев, Беляков, Клименко, Новогранов, Петряков, Сидорко, Стожков
МПК: B25J 9/00
Метки: резонансный, робот
...настройки за счет обеспечения независимой регулировки положения точек позиционирования.На чертеже изображена кинематическая схема робота. 1 ОРезонансный робот содержит подвижное звено 1 со схватом и приводом (непоказаны), компенсирующим потери натрение, возникающие при перемещениизвена 1 относительно основания 2 поддействием упругихэлементов 3 и 4.Дпя позиционирования звена 1 в крайнихположениях служат фиксаторы 5 и 6,установленные на основании с возможностью взаимодей .твин со звеном 1. Дпящообеспечения регулирования положенияпо крайней мере одной из точек позиционирования один из фиксаторов, например Фиксатор 5, и конец одного изупругих элементов 3 установлены на 25основании 2 с возможностью перемещения вдоль направления...
Способ управления резонансной механической рукой

Номер патента: 1553373
Опубликовано: 30.03.1990
Авторы: Акинфиев, Иванов, Кочубей, Новогранов, Степанов, Стрельч
МПК: B25J 9/00
Метки: механической, резонансной, рукой
...координата х выбрана меньше координаты, соответствующей остановке подвижного звена, то звено будет еще некоторое время двигаться в прежнем направлении, но при этом происходит интенсивное торможение, поскольку изменилась полярность питающего напряжения электродвигателя, Как частный случай за координату х, можно принять координату, соответствующую остановке подвижного звена при первом приложении питающего напряжения. После того, как звено достигнет положения, соответствующего координате х, и в результате изменения полярности питающего напряжения происходит торможение, а затем и его остановка, оно будет двигаться в другую сторону, пока не достигнет координаты х, при этом повторяется вся последовательность действий, что и при достижении...
Устройство управления объектом регулирования

Номер патента: 1465302
Опубликовано: 15.03.1989
Авторы: Акинфиев, Миронов, Новогранов, Степанов
МПК: B25J 13/00, B25J 9/16, G05B 11/00 ...
Метки: объектом
...компаратова 1 2 сигнал поступает на управляющий вход ключа 14,Обратная связь по скорости разомкнута ключом 14 до тех пор, пока относительная ошибка системы Е не сравняется по величине с сигналом, кото - 50рый подается на компаратор от задатчика 13 уставок. При этом двигатель развивает максимально возможные ско- рости и ускорение при данной нагрузке, После того как сигнал, соответствующий относительной ошибке, и сигнал, поступающий от эадатчика уставок, сравняются, компаратор 12 вырабатывает сигнал, который поступает на управляющий вход ключа 14. При этом обратная связь по скорости замыкается и устройство демпфируется.Момент времени, при котором происходит замыкание обратной связи по скорости, определяется величиной сигнала,...
Система управления

Номер патента: 1334104
Опубликовано: 30.08.1987
Авторы: Ковалев, Новогранов, Степанов
МПК: G05B 13/02
...блока 10 деления поступает сигнал с выхода моментного датчика 6, усиленный в усилителе 8. С выхода блока 10 деления сигнал идет на информационный вход блока 12 обратной связи, а на управляющий вход которого поступает сигнал с выхода элемента 11 сравнения. С выхода блока 12 обратной связи сигнал поступает на второй вход электропривода 4.Так как Физически невозможно ввести какую-либо коррекцию в обратную связь по упругому моменту между сумматорами 16 и 18, то была организована дополнительная отрицательная обратная связь между точками сумматоров 15 и 18. Этим объясняется появление структурного блока 26 с переБ.+Ь идаточной функцией И(р)Кмз 1. Заводя таким образом отрицательную обратную связь по упругому моменту, на вход...
Система управления
Номер патента: 1285427
Опубликовано: 23.01.1987
Авторы: Новогранов, Степанов
МПК: G05B 11/00
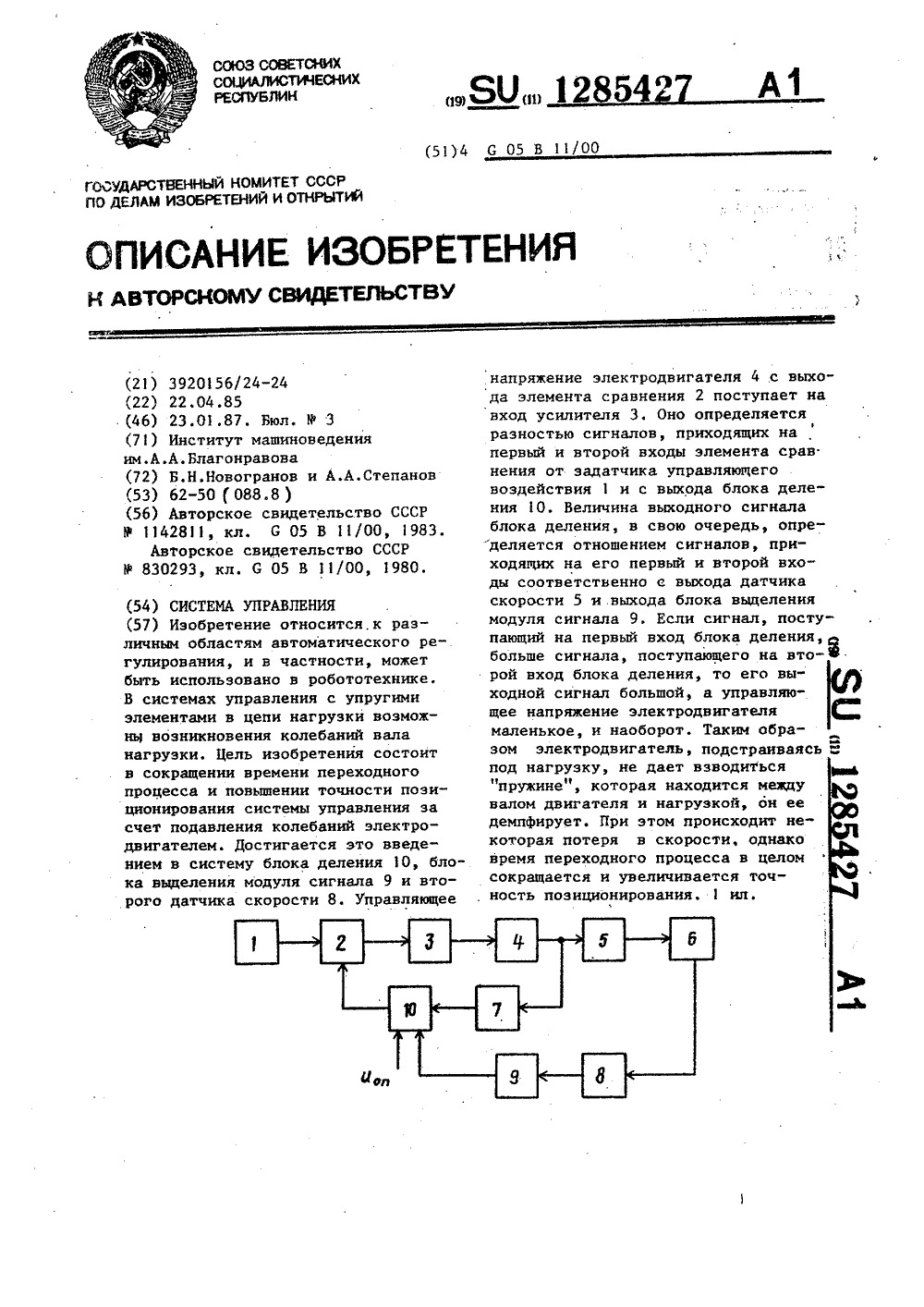
...Цель изобретения - сокращениевремени переходного процесса н повышение точности позиционирования системы.На чертеже приведена блок-схема Опредлагаемой системы управления.Система содержит задатчик 1 управляющего воздействия, элемент 2 сравнения по скорости, усилительэлектродвигатель 4, редуктор 5, объет 6 регулирования, первый датчик 7скорости, второй датчик 8 скорости,блок 9 выделения модуля сигнала иблок 10 деления.При проектировании системы принято,что редуктор абсолютно жесткий, авал двигателя связан с нагрузкойчерез "пружину", жесткость которойсоответствует жесткости реальногоредуктора,25Система работает следуизцим образом,Задатчик 1 управляющего воздействия вырабатывает управляющий сигналР, который поступает на первый...
Следящая система

Номер патента: 1142811
Опубликовано: 28.02.1985
Авторы: Маслов, Новогранов, Степанов
МПК: G05B 11/01
Метки: следящая
...обозначения: Б - выходноенапряжение 1 -го функциональногоблока, К; - коэффициент передачи1-го функционального блоха,Система работает следующим образом. С выхода задатчика 1 напряжение У 1, пропорциональное заданному положению объекта 10 регулирования, поступает на первый вход измерителя 2 рассогласования. На второй вход последнего поступает напряжение Б с выхода нелинейного бло 9ка 9. Два напряжения Б и П 9 сравниваются и на выходе измерителя 2 рассогласования формируется напряжение 02, пропорциональное заданнойскорости двигателя 5, которое поступает на первый вход сумматора 3.На второй инверсный вход сумматора3 поступает напряжение 06 с выходадатчика б скорости, пропорциональное текущему значению скорости двигателя 5. В...