Промышленный робот модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
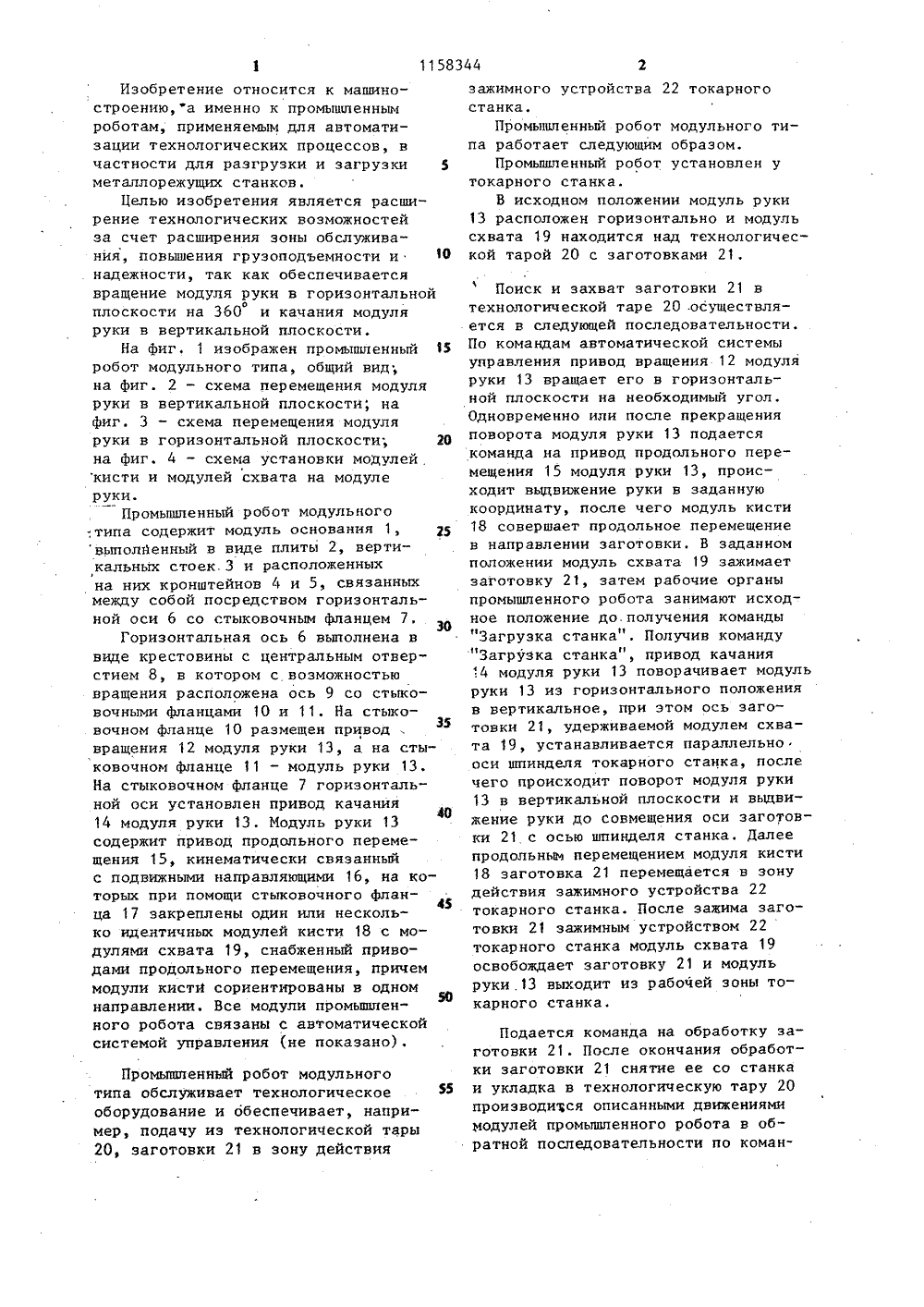
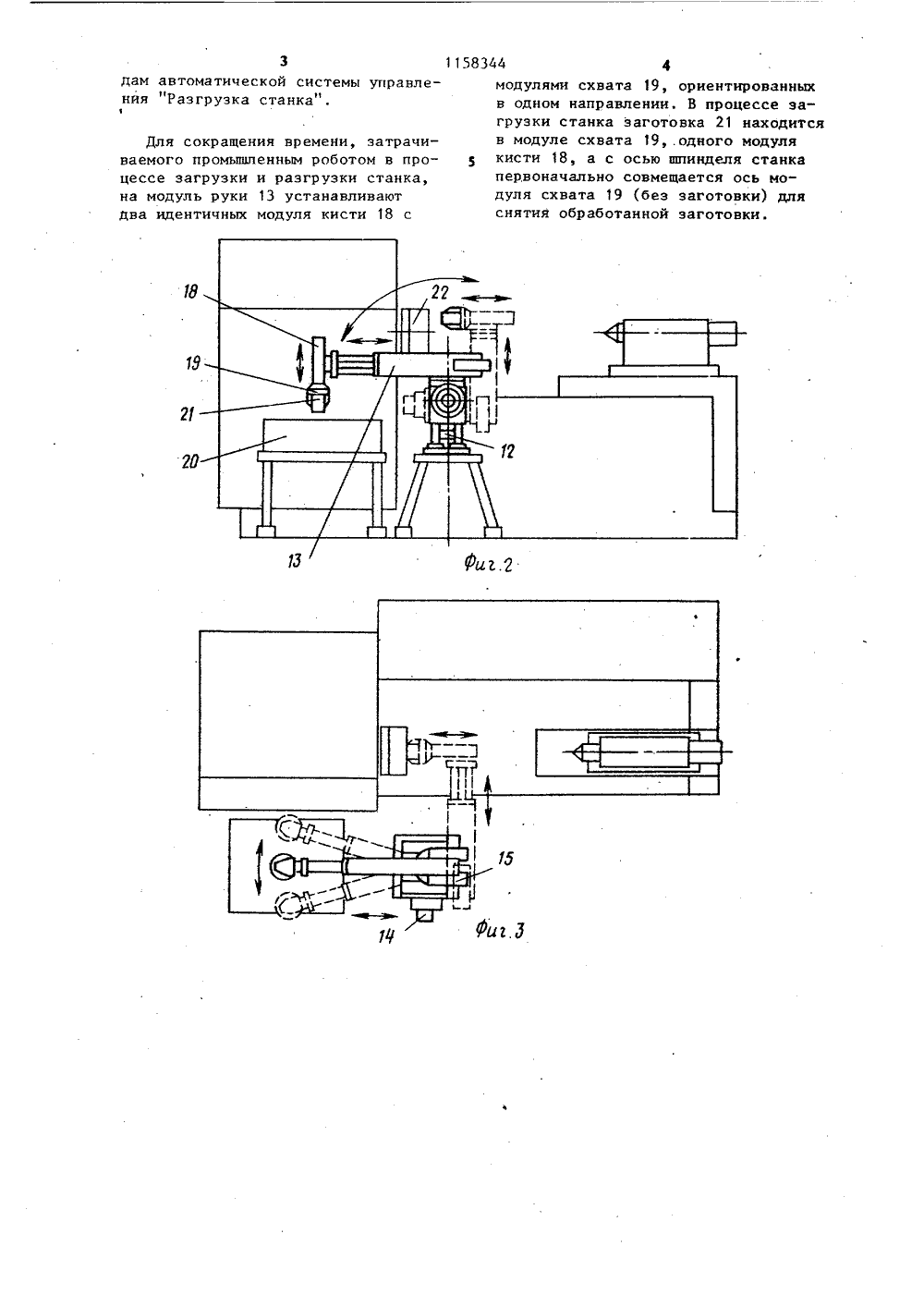
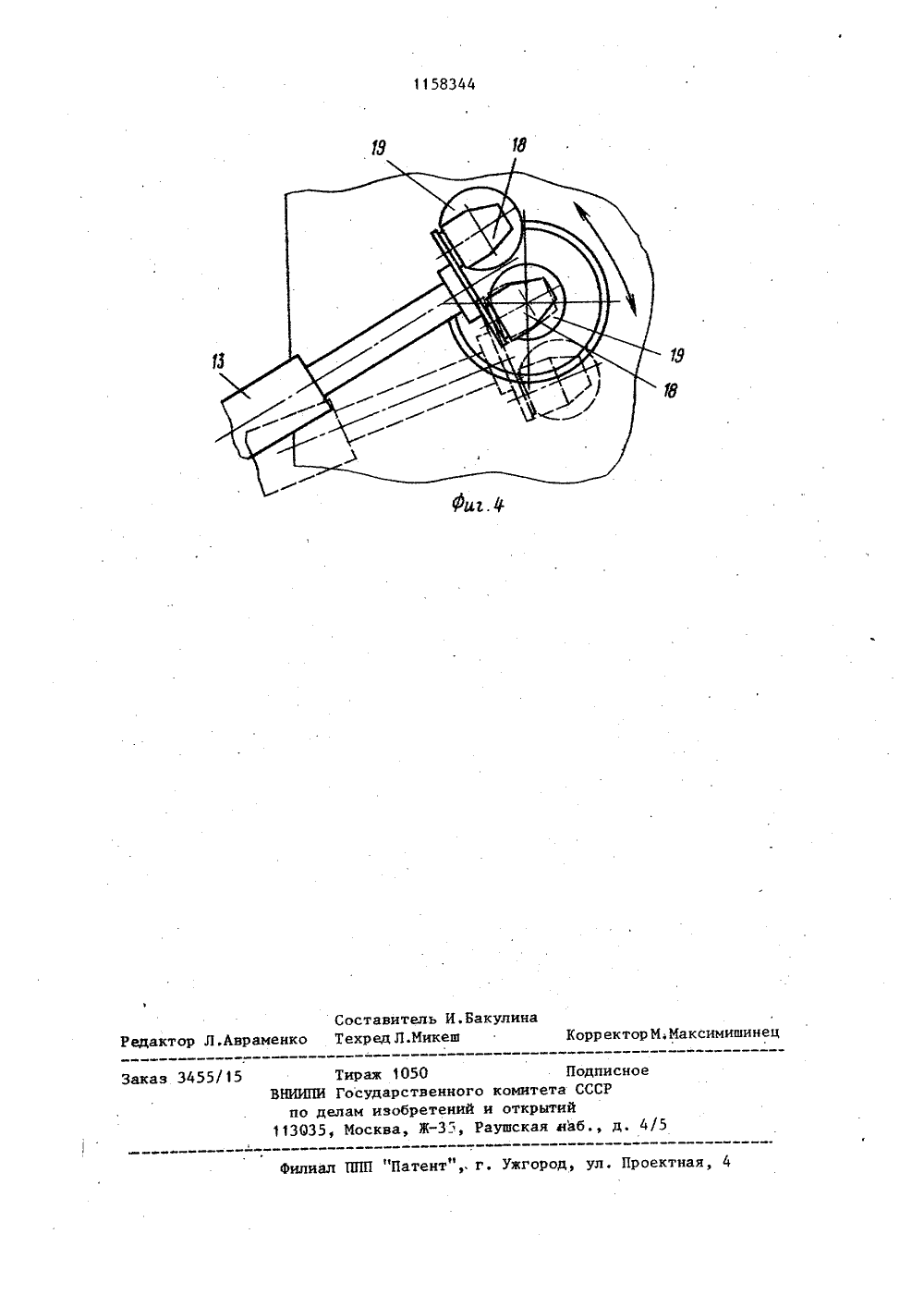
(54)(57) ПРОМЫШЛЕННЫЙ РОБОТ МОДУЛЬНОГО ТИПА, содержащий имеющие стыковочные фланцы, модули основания,руки и схвата, приводы вращения, качения и продольного перемещения руккисти и схвата, о т л и ч а ю -щ и й с я тем, что, с целью расширения технологических возможностей ивания,за счет расповышения грности, модулвиде плиты с ширения зоны об оподъемности и над основания выполнен ертикальными ками и,2. ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ АВ 1 ОРСНОМУ СВИД 4(5 В 25 ) 9/00; В 25 Л 17/00 и расположенными на них кронштеинами,связанными между собой. посредствомгоризонтальной оси с. фланцем, выполненной в виде крестовины с центральным отверстием, в котором с возможностью вращения расположена ось состыковочными фланцами, на одном иэ.которых размещен привод вращенияруки, а на другом - модуль руки,при этом на фланце горизонтальнойоси установлен привод качания модуля руки.Изобретение относится к машиностроению, а именно к промышленным роботам, применяемым для автоматизации технологических процессов, в частности для разгрузки и загрузки 5 металлорежущих станков.Целью изобретения является расширение технологических возможностей за счет расширения зоны обслуживания, повышения грузоподъемности и 1 О надежности, так как обеспечивается вращение модуля руки в горизонтальнойоплоскости на 360 и качания модуля руки в вертикальной плоскости.На фиг. 1 изображен промышленный 1 робот модульного типа, общий вид; на фиг. 2 - схема перемещения модуля руки в вертикальной плоскости; на фиг. 3 - схема перемещения модуля руки в горизонтальной плоскости; 20 на фиг. 4 - схема установки модулей кисти и модулей схвата на модуле руки.Промышленный робот модульного ;типа содержит модуль основания 1, д выполйенный в виде плиты 2, вертикальных стоек. 3 и расположенных 3на них кронштейнов 4 и 5, связанных между собой посредством горизонтальной оси 6 со стыковочным фланцем 7,Горизонтальная ось 6 выполнена в виде крестовины с центральным отверстием 8, в котором с возможностью вращения расположена ось 9 со стыковочными фланцами 10 и 11. На стыковочном фланце 10 размещен привод вращения 12 модуля руки 13, а на стыковочном фланце 11 - модуль руки 13. На стыковочном фланце 7 горизонтальной оси установлен привод качания 14 модуля руки 13. Модуль руки 13 содержит привод продольного перемещения 15, кинематически связанный с подвижными направляющими 16, на которых при помощи стыковочного фланца 17 закреплены один или несколько идентичных модулей кисти 18 с модулями схвата 19, снабженный приводами продольного перемещения, причем модули кистИ сориентированы в одном направлении. Все модули промышленного робота связаны с автоматической системой управления (не показано),Промышленный робот модульного типа обслуживает технологическое оборудование и обеспечивает, например, подачу из технологической тары 20, заготовки 21 в зону действия зажимного устройства 22 токарного станка.Промышленный робот модульного типа работает следующим образом.Промышленный робот установлен у токарного станка.В исходном положении модуль руки 13 расположен горизонтально и модуль схвата 19 находится над технологической тарой 20 с заготовками 21.Поиск и захват заготовки 21 в технологической таре 20 .осуществляется в следующей последовательности, По командам автоматической системы управления привод вращения 12 модуля руки 13 вращает его в горизонтальной плоскости на необходимый угол. Одновременно или после прекращения поворота модуля руки 13 подается команда на привод продольного перемещения 15 модуля руки 13, происходит выдвижение руки в заданную координату, после чего модуль кисти 18 совершает продольное перемещение в направлении заготовки. В заданном положении модуль схвата 19 зажимает заготовку 21, затем рабочие органы промышленного робота занимают исходное положение до.получения команды "Загрузка станка". Получив команду "Загрузка станка", привод качания 4 модуля руки 13 поворачивает модуль руки 13 из горизонтального положения в вертикальное, при этом ось заготовки 21, удерживаемой модулем схвата 19, устанавливается параллельно оси шпинделя токарного станка, после чего происходит поворот модуля руки 13 в вертикальной плоскости и выдвижение руки до совмещения оси заготовки 21 с осью шпинделя станка. Далее продольным перемещением модуля кисти 18 заготовка 21 перемещается в зону действия зажимного устройства 22 токарного станка. После зажима заготовки 21 зажимным устройством 22 токарного станка модуль схвата 19 освобождает заготовку 21 и модуль руки 13 выходит из рабочей зоны токарного станка.Подается команда на обработку заготовки 21. После окончания обработки заготовки 21 снятие ее со станка и укладка в технологическую тару 20 производися описанными движениями модулей промьппленного робота в обратной последовательности по командам автоматической системы управления Разгрузка станка".1 Для сокращения времени, затрачиваемого промышленным роботом в процессе загрузки и разгрузки станка, на модуль руки 13 устанавливают два идентичных модуля кисти 18 с 1158344 4модулями схвата 19, ориентированных в одном направлении. В процессе загрузки станка заготовка 21 находится в модуле схвата 19,.одного модуля кисти 18, а с осью шпинделя станка первоначально совмещается ось модуля схвата 19 (без заготовки) для снятия обработанной заготовки.1158344 Редактор Л.Аврамен Составитель И, Бакулин икеш ех Тираж 1050 Заказ 3455/15 Подписноета СССРтийнйб д, 4/ ал ППП "Патент" г. Ужгород, ул. Проектная,НИИПИ по д1393 осударственного комит ам изобретений и откр Москва, Ж:, Раушска орр ек тор М. Максимишинец
СмотретьЗаявка
3560365, 28.02.1983
ПРЕДПРИЯТИЕ ПЯ Ю-9192
ПАНКРАТОВ ЭДУАРД НИКОЛАЕВИЧ, БАКАЛОВ СЕРГЕЙ ИВАНОВИЧ, ЗАЙЦЕВ АЛЕКСЕЙ ИГНАТЬЕВИЧ
МПК / Метки
МПК: B25J 17/00, B25J 9/00
Метки: модульного, промышленный, робот, типа
Опубликовано: 30.05.1985
Код ссылки
<a href="https://patents.su/4-1158344-promyshlennyjj-robot-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Промышленный робот модульного типа</a>
Привод робота

Номер патента: 1303399
Опубликовано: 15.04.1987
Автор: Акинфиев
МПК: B25J 9/00
...шток находится в одном из крайних положений, подвижная часть 6 фиксатора находится в зацеплении с ответной частью 7, датчик 21 положения взаимодействует со штоком 3 и через тягу 20 удерживает кран-выключатель 19 в закрытом состоянии, подвижный элемент крана-переключателя занимает крайнее положение (последнее условие не является обязательным).Для начала движения фиксатор 7 выводят из зацепления с ответной частью 6 и шток 3 под действием упругого элемента 4 начинает интенсивный разгон, а после прохождения среднего положения интенсивное торможение. В тот момент, когда начинается движение штока, датчик 21 положения перестает взаимодействовать с ним и кран-выключатель 19 под действием средств возврата переходит в открытое состояние и...
Станок для растяжки заготовки валяной обуви

Номер патента: 148526
Опубликовано: 01.01.1962
Авторы: Абрамов, Игнатьев, Крапивин, Кришталович
МПК: G06F 15/163
Метки: валяной, заготовки, обуви, растяжки, станок
...бойком 5, приводимым в возвратно-поступательное движение в вертикальной плоскости от кривошипно-шатунного механизма б. Рычаг 1 смонтирован на оси 7 и поворачивается вокруг нее при помощи винтового механизма 8.Работа станка осуществляется следующим образом,После распарки заготовка валяной обуви надевается голенищем на сдвинутые вместе рычаги 1, 2 и 3. Затем носок заготовки рукой отжимается вниз и рычагом 3 вытягивается.Рычаг 1, поворачиваясь от винтового механизма 8, растягивает пятку заготовки и подводит последнюю под боек 5 приспособления для разбивки пятки. За определенное число двойных ходов ползуна 4 пятка за М 148526готовки разбивается, а носок окончательно вытягивается. Затем рычаг 1 занимает первоначальное положение, а...
Привод робота

Номер патента: 1357225
Опубликовано: 07.12.1987
Авторы: Другов, Иванов, Каплун
МПК: B25J 17/00
...штока 17, с которым связана подвижная часть датчика 8 (фиг,2), или с помощью рычагов, например, для поворота 7225 2 звена 18 (фиг.4). Для этого звено18,через одностепенной шарнир 19 подвешено к выступу 20 на наружной стороне пневмоцилиндра 2. Обратный (нереализующий выходное перемещение)конец звена 18 через два идентичныхвспомогательных рычага 21 и 22 шарнирно связан с двумя диаметральнопротивоположными выступами 23 и 24,выполненными в средней части поршня1 и размещенными в двух продольныхнаправляющих 25 и 26, выполненных впневмоцилиндре 2. Поскольку угол поворота звена 18 и положение поршня 1связаны однозначной зависимостью, тоцелесообразным в этом варианте привода является использование более простого и распространенного датчика8...
Привод робота-манипулятора

Номер патента: 1576308
Опубликовано: 07.07.1990
Автор: Литвиненко
МПК: B25J 11/00, B25J 9/12
Метки: привод, робота-манипулятора
...(Фиг. 2) состоитиз участка линейных проводников 16 илобовых частей. Лобовые части секции включают боковые 2 и 25 и центральный 26 участки.Дополнительная магнитная системаустановлена в зоне лобовых частей 17на основании 27, Она имеет магнитопровод 28, катушку 29 и полюсные наконечники 30, установленные у лобовыхчастей 17. 50Привод работает следующим образом,При приходе модуля в точку позиционирования якорь 15 помещается взазоре между полюсами 18 основноймагнитной системы 19 (линейные проводники 16) и между полюсами 30 дополнительной магнитной системы 28(лобовые части 17), Включается питание модуля, ток по щеткам 22 подводится к якорю 15До этого моментавремени пружины 12 поджимают обоймы11 с подшипниками 10 к диску 7. Накладки 9 прижаты к...
Станок для завивки заготовки сверл

Номер патента: 115917
Опубликовано: 01.01.1958
Авторы: Курбатов, Подгурский
МПК: B21D 11/06, B21H 3/10
Метки: завивки, заготовки, сверл, станок
...имеет систему воздушного охлаждения, выполненного в виде внутренних воздушных камер 12 с давлением больше атмосферного, и одновременный подвод воздуха в посадочные зазоры кулачков.Исполнительный механизм осуществляет цикл работы, заключающийся в сведении цантрирующих кулачков для правки, кручении заготовки, остановки процесса, разведении кулачков и обратного вращения.Исполнительный механизм приводится в движение от электродвигателя 13 через муфту 14 и червячную пару 15 и 1 б, передающую вращение валу 17, соединенному через кулачковую муфту 18 с валом 19, на котором помещается кривошипно-кулисный механизм (20, 21, 22, 23 и 24), приводящий в движение рейку 25, соединенную с зубчатым колесом 27. Колесо 2 о приводит в движение...
Предыдущий патент: Механическая рука
Следующий патент: Агрегат для пачковой раскряжевки лесоматериалов
Случайный патент: Электромагнитный клапан