G05B 13/02 — электрические
Система управления

Номер патента: 1285430
Опубликовано: 23.01.1987
Авторы: Авдеев, Киселев, Купчик, Мышляев
МПК: G05B 13/02
...добавки в Ограниченном ди- Р 5 выбираемые извеапазонг, которые даются в конвертерстными методами,с очень малым времснем запаздывания 1Цель изобретения - расширение фун- Сигнал Об ц (с) экстрапалируетсяг1фькциональных возможностей и повьпцение 45 на время запаздывания с в первомточности регулирования, экстраполяторе 13 и через первый исНа чертеже представлена блок-схема полнительный блок 2 подается на персистемы управления. вый вход объекта 1 управления. Крометого, экстраполируемый сигнал задерСистема управления содержит обьект 5 живается на время с в первом блоке1 управления, первый 2 и второй 3 ис задержки и вычитается в первомполнительные блоки датчик 4, второй блоке 11 сравнения иэ выходного сигблок 5 задержки, третий блок б...
Система экстремального регулирования

Номер патента: 1290254
Опубликовано: 15.02.1987
Авторы: Николаенков, Рязанов
МПК: G05B 13/02
Метки: экстремального
...выхода датчика экстремума 3, причем запоминающее устройство 5 работает в режиме запоминания того же сигнала. После прохождения промежуточного максимума характеристика объекта на выход запоминающего уст 10 15 20 25 30 35 ройства 5 остается неизменной, а сигнал на втором выходе датчика 3 начинает уменьшаться. В момент эти сигналы сравниваются и компаратор 7 формирует положительный управляющий сигнал КБ-триггера логического элемента 8. Последний переключается и интегратор 1 изменяет направление поиска экстремума объекта на обратное, До изменения полярности напряжения на выходе элемента задержки 9 сохраняются прежние режимы устройств 5 и 6. Время задержки элемента 9 должно быть выбрано так, чтобы при заданной .инерционности объекта...
Самонастраивающаяся система управления
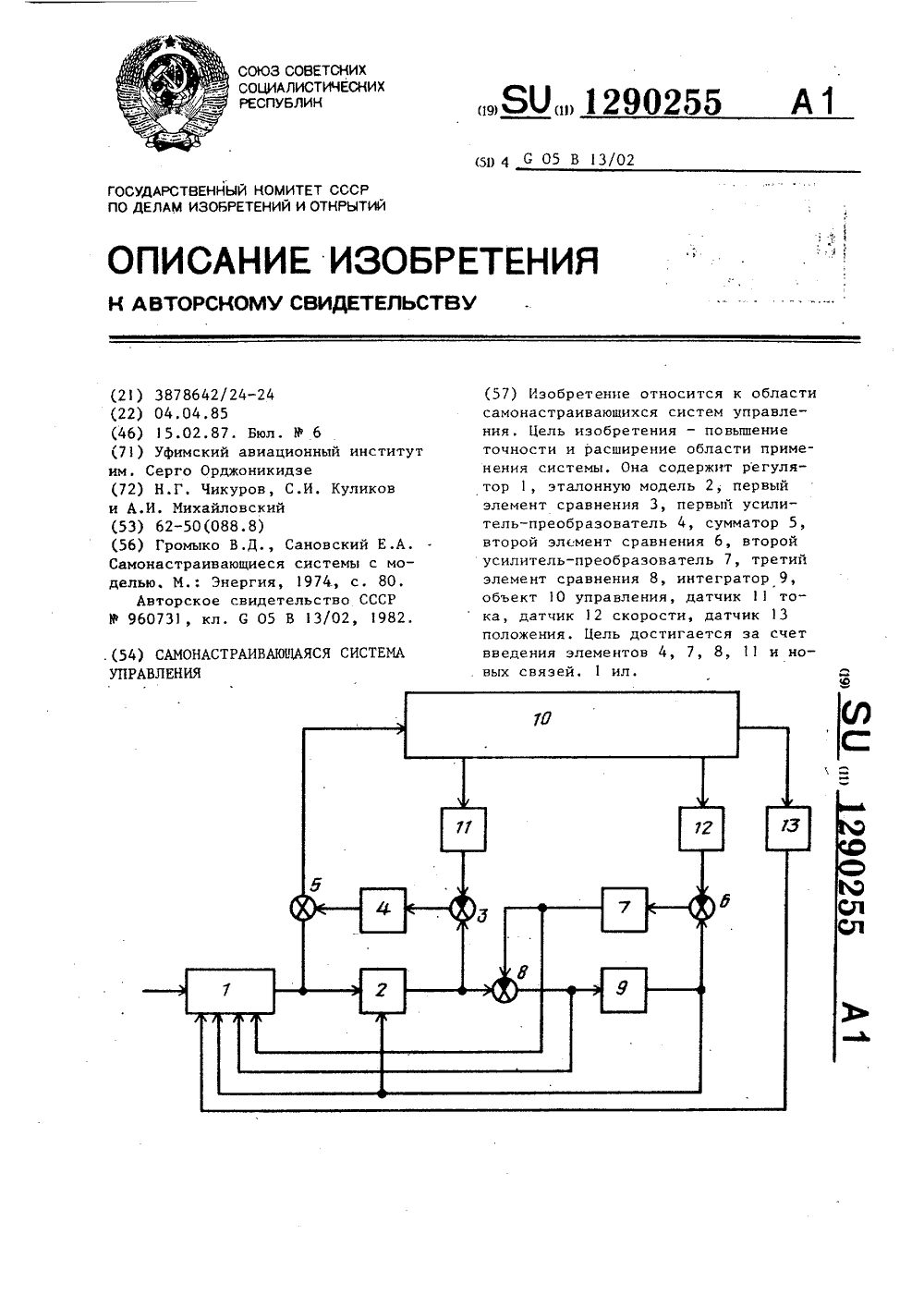
Номер патента: 1290255
Опубликовано: 15.02.1987
Авторы: Куликов, Михайловский, Чикуров
МПК: G05B 13/02
Метки: самонастраивающаяся
...выполня ется с помощью третьего элемента сравнения 8. Сигнал на его выходе пропорционален второй производной выходной координаты объекта управления. Сигнал с выхода интегратора 9, пропорциональный первой производной выходной координаты, сравнивается с помощью второго элемента сравнения 6 с фактическим значением скорости объекта управления 10. Действие нагрузки М на объект управления приводит к появлению на выходе второго элемента сравнения 6 сигнала ошибки, который через второй усилитель-преобразователь 7 поступает на первый вход третьего элемента сравнения 8 и восстанавливает соответствие между скоростью объекта управления и ее оценкой на выходе интегратора. Поскольку значение тока в якорной цепи электродвигателя задано с помощью...
Выделитель максимума

Номер патента: 1290256
Опубликовано: 15.02.1987
МПК: G05B 13/02
Метки: выделитель, максимума
...состояние, поскольку на Я-входе присутствует сигнал логического нуля, а на К-входе - импульслогической единицы, сформированныйКС-цепью, и ключи 16, 15 г, 1 бг будут выключены,Дальнейшее увеличение Бнеизменит состояние логической единицына выходе оптрона 3 .Теперь предположим, что напряжение Цв , возрастая, сравнялось снапряжением Бтогда окажутсявключенными одновременно оптроны3 и Зг, Инвертированный инвертором5 сигйал включенного оптрона Зг через элемент Ц 7 поступает на Я-входКЯ-триггера 13, который сохраняетсвое единичное состояние, посколькуна К и Я-входах КЯ-триггера 13 присутствуют сигналы логического нуляи, следовательно, ключи исполнительных устройств не изменяют свое состояние., Если напряжение Бвг превысит ве,личину входного...
Бинарная система управления

Номер патента: 1294798
Опубликовано: 07.03.1987
Авторы: Ахтырский, Емельянов, Коровин, Сизиков, Цветкова
МПК: G05B 13/02
Метки: бинарная
...в ряде случаевв главном конгуре регулирования затруднено или недопустимо.Из этого следует, что проблемаэффективного управления неопределенными динамическими системами представляет большой теоретический ипрактический интерес, При этом наибольший интерес представляют такиеее решения, которые учитывают реальные ограничения на управляемые переменные коэффициенты передачи и позволяют использовать в основном контуререгулирования непрерывные управления.Таким требованиям удовлетворяют бинарные системы автоматического управления, основанные на принципе бинарности, в соответствии с которым координаты и операторы системы управлениярассматриваются в виде единой совокупности ее переменных состояния.Каждый элемент такой совокупности может...
Устройство для адаптивного управления металлорежущими станками с чпу

Номер патента: 1295366
Опубликовано: 07.03.1987
Авторы: Дроздов, Зазиев, Исаков, Лаптев, Таварткиладзе, Церетели
МПК: G05B 13/02
Метки: адаптивного, металлорежущими, станками, чпу
...сигнала с выходабб 3 12953 блока 3 сравнения устанавливается напряжение (всегда одной полярности), равное максимальному. Под действием этого напряжения на выходе управляемого тактового генератора 7 устанав ливается частота импульсов, равная 1 МГц и номинальной частоте тактового генератора.Итак, до начала резания на выходе управляемого тактового генератора 7 частота импульсов 2=1 МГц номинальная, коэффициент деления управляемо го делителя б частоты равен 1, а блок задания контурной скорости вырабатывает ту скорость подачи, ко 15 торая задана и в управляющей программе. На этой скорости начинается резание. По мере увеличения мощности резания (в связи с изменениями параметров резания) напряжение на выходе20 блока 3 сравнения начинает...
Адаптивная система управления объектами с запаздыванием

Номер патента: 1297009
Опубликовано: 15.03.1987
Авторы: Ажогин, Бидюк, Демченко, Згуровский, Катюшин, Корбич, Романенко, Якимчук
МПК: G05B 13/02
Метки: адаптивная, запаздыванием, объектами
...коэффициентов регулятораиз-за высокого поряцка. Вычислительная процедура становится слишкомсложной. Поэтому для этой цели используется модель низкого порядкавида У= -а;У; + Ь, П ,+ с;Ч.;3 12970 где д - оценка истинного времени запаздывания объекта.Для оценки Й используется метод вычисления и сравнения весовых функций объекта по модели (3) и по мо 5 дели (4), причем по модепи (4) вычисляются импульсные характеристикилдля каждого значения д,; в диапазонелО, , с 1 - 1. С выходов блока 6 идентификации параметров объекта 10л лоценки а Ь, с. коэффициентов модели (3) поступают на входы блоков 7, 8, 11 и 12. В блоке 7 вычисляется весовая функция Н(Е) (2) объекта как обратное Е-преобразование модели (3), 15 т.е. М=Ь 1 л лдЬд 1 = Ь - а Ь",Я 21...
Самонастраивающаяся система управления

Номер патента: 1300412
Опубликовано: 30.03.1987
Автор: Орещенко
МПК: G05B 13/02
Метки: самонастраивающаяся
...элемента 3 1 вызывает немедленную реакцию элемента 3 1 на сигнал, поступающий на его пер вый вход.Иножительно-делительный блок 38 обеспечивает на своем выходе величину, обратную произведению сигналов, поступающих на его входы. Выходной сигнал множительно-делительного блока пропорционален величине 1ТБ 3)30Выходной сигнал первого функционального преобразователя 39 пропорци%онален величине зп-.2Выходной сигнал второго Функционального преобразователя 40 пропорционален величине сов(- - -) .в 2Выходной сигнал источника 41 сиг/ нала пропорционален величине - .ШКомпаратор 42 обеспечивает на своем выходе сигнал в промежутках времени, когда оба сигнала на его входах45 имеют нулевые значения.Блок 43 измерения длительности импульса тока...
Устройство экстремального управления технологическим процессом

Номер патента: 1305632
Опубликовано: 23.04.1987
Авторы: Еременко, Макеев, Медведев, Москалец
МПК: G05B 13/02
Метки: процессом, технологическим, экстремального
...роста и спада, зафиксировавших их ранее. Выходными сигналами с указанных триггеров сбра сывается триггер максимума и взводится триггер минимума, выдавая на выход 2.1 (" Минимум" ) блока определения экстремумов соответствующий сигнал. 15Сигналы "Рост" и "Спад" с анализатора (выходы 3.1 и 3.2) "Максимум" и "Минимум" с соответствующих триггеров (выходы 1 и 2,1) поступают в блок индикации для контроля за хо1 гв дом процесса, а сигналы Максимум и Минимум" - на соответствующие исполнительные механизмы для управления процессом.В режиме регулирования по команде 25 из блока 7 запуска переключатель режимов блока 5 определения экстремумов устанавливается в такое положение, при котором сигналы с выхода анализатора поступают на соответст вующие...
Устройство для адаптивной идентификации объекта

Номер патента: 1305633
Опубликовано: 23.04.1987
Авторы: Авдеев, Берлин, Кошелев, Львова, Мышляев, Фомин
МПК: G05B 13/02
Метки: адаптивной, идентификации, объекта
...сравнения задерживаются соответственно в третьем 16, четвертом17 и пятом 18 блоках памяти на интервал времени, необходимый для срабатывания схемы первого уровня, и подаются на первый, второй и третийвходы второго блока 19 расчета корректировки, функционированиекоторого аналогично первому блоку 11корректировки, С первого выхода второго блока 19 расчета корректировкиПимпульс о 81 (д) суммируется с имипульсом о 61,(1.-1) шестого блока 24в седьмом сумматоре 21, Выходной импульс седьмого сумматора 2111, п и,Ь 1 с, (з.)= ь 1 с (- 1) + В 1 с, (5)подается на шестой блок 24 памяти иипятый сумматор 26. Импульс о 1; (-1)с выхода шестого блока 24 памятисуммируются в восьмом сумматоре 20 симпульсом о 1 (д) с выхода первого1сумматора 12, в...
Самонастраивающаяся система управления для объектов с запаздыванием

Номер патента: 1305634
Опубликовано: 23.04.1987
Авторы: Као, Карлос, Нгуен, Пичугин, Рауль
МПК: G05B 13/02
Метки: запаздыванием, объектов, самонастраивающаяся
...5 производится параллельно перестройке параметров блока 5 коррекцииПри этом сохраняется соотношение14(р) = 1/Ы,(р).При использовании ПИ-закона регулирования оператор регулятора имеет вид:И .(р) = К (г.)--- - ) (2)ягде К - коэффициент передачи регулятора;Тц(г) - время изодрома регулятора.Алгоритм работы блока 13 оптимизации параметров регулятора 5 можно использовать, например, в виде(3)где И, А, Ь - соответственно заданное и действительное число перемен знака сигнала б на интервале времени (;К,(С), К (-2 ) - коэффициент передачи регулятора соответственно в текущий момент времени и в момент времени, предшествующий на времяТц(г.) - время изодрома регулятора в текущий момент времени;С С - коэффициенты, выбираемые для конкретного...
Адаптивная система управления для объектов с запаздыванием

Номер патента: 1310774
Опубликовано: 15.05.1987
Авторы: Воблов, Кулаков, Москаленко, Фурунжиев
МПК: G05B 13/02
Метки: адаптивная, запаздыванием, объектов
...устанавливается в режим вычитания сигналом с третьего выхода дешифратора 34, при этом из содержимого счетчика 35 вычитаются импульсы, т.е.реализуется аналогичным образом зависимость 7 - С.Установка прогнозируемого (исходного) времени запаздыванияв, ис счетчике 35 производится . адатчиком 36 запаздывания. Блок 38 управления блока 10 осуществляет подстройку запаздывания в модели 7.При адаптации времени запаздывания модели подстройка коэффициентов усиления с помощью блока 9 и подстройка эквивалентной постоянной времени модели с помощью блока 15 запрещены сигналом с второго выхода блока 10 подстройки запаздывания (четвертого выхода дешифратора 34, фиг. 3), Этот запрет необходим для устранения неопределенности при делении выходных сигналов Х...
Самонастраивающаяся система управления
Номер патента: 1312524
Опубликовано: 23.05.1987
Авторы: Борцов, Егоров, Пашков, Черных, Юнгер
МПК: G05B 13/02
Метки: самонастраивающаяся
...2 регулирования, устройство 3 сравнения, модель 4, блок 5 релейных элементов, блок 6 фильтров, первый инвертор 7 и второй инвертор 8.Самонастраивающаяся система управления работает следующим образом.Задающий входной сигнал системы поступает на первый вход сумматора 1. С выхода сумматора 1 сигнал, равный отклонению регулируемой переменной на втором и третьем входах сумматора 1 от заданного значения входной переменной на первом входе, поступает на вход объекта 2 регулирования и вход модели 4. При совпадении динамических свойств объекта 2 регулирования и модели 4 сигналы, поступающие на первый и второй входы сравнивающего устройства 3, равны и поэтому сигнал с выхода сравнивающего устройства 3 равен нулю. При этом работает лишь контур из...
Устройство для компенсации зоны нечувствительности

Номер патента: 1314303
Опубликовано: 30.05.1987
Авторы: Бушанский, Воробьев, Созонник, Стеклов
МПК: G05B 13/02, H03K 5/02
Метки: зоны, компенсации, нечувствительности
...ВН 1 Я 1 ПИ Государственного комитета С по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., Производственно-полиграфическое предприятие, г, Ужгород, ул, Проектная,1Изобретение относится к средствам автоматического регулирования и мо"жет быть использовано в устройствах управления радиолокационными станциями,Цель изобретения - повышение точности устройства.На черТеже изображена схема предлагаемого устройства,Устройство содержит нелинейныйФ 1,блок 1 с. вдйой нечувствительности,сумматор 2,;полярзованное реле 3,дифференциатор 4 и,суммирующий усилитель 5.Устройство работает следующим образом.При поступлении на вход устройства сигнала х(г.) последний дифференцируется дифференциатором 4 и поступает на вход суммирующего...
Система автоматического управления

Номер патента: 1315935
Опубликовано: 07.06.1987
Авторы: Михальченок, Новиков, Сидорович, Суслов
МПК: G05B 13/02
...поступление на вход блока 4 управления второго сигнала задания и запись в запоминающее устройство 9 содержимого первого регистра 8 и с задержкой времени запись в первый регистр 8 нового значения ошибки.Отработка следующих импульсов задающего генератора 12 происходит аналогично, при этом содержимое запоминающего устройства 9 продвигается к его выхоцу так, что поступление 11-го импульса синхронизации приводит к его полному заполнению. На его выходе появляется значение сигнала ошибки, измеренное на первом периоде квантования, и поступает через блок 10 деления на второй вход первого сумматора 2, В результате на вход блока 4 управления поступает сигнал управления, равный сумме текущего сигнала задания и сигнала компенсации, сдвинутого в...
Система управления вибратора

Номер патента: 1315936
Опубликовано: 07.06.1987
Автор: Колмаков
МПК: B06B 1/04, G05B 13/02
Метки: вибратора
...собой фильтр нижних частот, постоянная времени которогоЕ= ----1 йсопределяется величиной постоянной времени блока дифференцирования р и коэффициентом усиления ЬЕ. При выбо-, ре коэффициента 1 из условия статической точности.1 сЬ уЬ Т рГ +11, + Е где Ь- допустимая статическаяошибка;Й , Г , Е - значения функцийст1 ст2 ст= сопят;минимальное значение постоянной временипри изменении функции временив интервале ЬмЬмаксравно гдеМ= ц 2 Е + р +Таким образом, помехозащищенность известного вибратора определяется величиной отношения Ь/Ъ , при этом на выход вибратора проходят практи315936 55 чески без подавления все гармоникисигнала 1 д(Г) вплоть до частотыТ М ЬмсюксЯь 1 мин Кроме того, при изменении функции Ь меняется положение полюсов...
Устройство для адаптивного управления двухкоординатным станком

Номер патента: 1325406
Опубликовано: 23.07.1987
Авторы: Лапшин, Покровский
МПК: G05B 13/02
Метки: адаптивного, двухкоординатным, станком
...колебаний непосредственно,на второй вход - через блок 9 ограничения вибраций. Если уровень колебаний больше допустимого, то с выхсдапервого элемента 1 О сравнения поступает сигнал, ограничивающий сигналошибки и тем самым ограничивающийскорости подач.Параллельно сигнал от задатчика 18мощности резания поступает на датчик19 скорости изменения входного воздействия, а сигнал с выхода второгсэлемента 11 сравнения - на датчик 16дисперсии случайной помехи. Сигнальдатчиков 16 и 19 поступают иа блок17 адаптации, в котором вь:рабатывается сигнал управления, устанавливающий в усилителе 12 оптимальный коэфФициент усиления.Сигнал ошибки с выхода третьегоэлемента 15 сравнения усиливаетсяусилителем 12 и псступает в регулятор 1 подачкоторый через блок...
Адаптивная система управления процессом стерилизации

Номер патента: 1332261
Опубликовано: 23.08.1987
Авторы: Полтолярный, Попок, Ситников, Торопов, Уланов, Шубладзе
МПК: G05B 13/02
Метки: адаптивная, процессом, стерилизации
...значения на интеграторах 36 н 37, на выходах элемента ИЛИ 21, компараторов 44 и 43 - "1", на выходах компаратора 45 и элемента ИЛИ 22 - "0", Сигнал с задатчика 23 по цепи (30, 31) поступает на вход интегратора 36.На фиг. 2 размыканию соответствует "0", за исключением работы прерывателя 31. Цепь задатчик 23 - интегратор 36 размыкается до конца процесса прерывателем 31 с моментакогда температура в автоклаве впервые достигает значения температурыстерилизации Т, задаваемой сигналомс задатчика 24. После раэмыканияна выходе сумматора 40 получаетсясигнал, по величине (А) равный разности сигналов с интегратора 26 изадатчика 24, Выходной сигнал с переключателя 20 - сигнал с интегратора 36, если элемент ИЛИ 22 выдаетсигнал "1", и сигнал с...
Система идентификации линейных объектов

Номер патента: 1334103
Опубликовано: 30.08.1987
Авторы: Ашимов, Заграничный, Сыздыков
МПК: G05B 13/02
Метки: идентификации, линейных, объектов
...идентификации линейныхобъектов работает следующим образом.Входные сигналы 0 п 1 подаются навход модели 2, первого блока параметрической настройки 3, первого сумма"тора 4. 10 20 25 30 40 Модель объекта управления представляется в виде г45 У.п=(В п - 11+ 1 Яп) 0 п, (1) где 1 - единичный вектор размеромИ 1, В п 1 - вектор оцениваемых параметров, вычисляемый в первом блокепараметрической настройки 3 по итеративному алгоритму, например В Я =В п+Г (У п -Ум п"1 ) 13 п 1 "(2) 55 где Г-(И М) -диагональная матрица весовых коэффициентов,п - общая составляющая параметров модели, вычисляемая во втором блоке параметрической настройки 7 по итеративномуалгоритму, ьапример= п+(У п,пЯ 1 0 п,(3)Выход первого сумматора 4 и второго блока параметрической...
Система управления

Номер патента: 1334104
Опубликовано: 30.08.1987
Авторы: Ковалев, Новогранов, Степанов
МПК: G05B 13/02
...блока 10 деления поступает сигнал с выхода моментного датчика 6, усиленный в усилителе 8. С выхода блока 10 деления сигнал идет на информационный вход блока 12 обратной связи, а на управляющий вход которого поступает сигнал с выхода элемента 11 сравнения. С выхода блока 12 обратной связи сигнал поступает на второй вход электропривода 4.Так как Физически невозможно ввести какую-либо коррекцию в обратную связь по упругому моменту между сумматорами 16 и 18, то была организована дополнительная отрицательная обратная связь между точками сумматоров 15 и 18. Этим объясняется появление структурного блока 26 с переБ.+Ь идаточной функцией И(р)Кмз 1. Заводя таким образом отрицательную обратную связь по упругому моменту, на вход...
Устройство для адаптивного управления

Номер патента: 1343390
Опубликовано: 07.10.1987
Авторы: Ермакова, Ким, Коваль, Коробко, Крончев
МПК: G05B 13/02
Метки: адаптивного
...интенсивнее, чем АфА, и вследствие этого обеспечивается возврат к исходному значению уставки мощности И (момент 1, ).Устройство содержит последовательно соединенные задатчик 1 мощности, первый элемент 2 сравнения, релейно- дискретный регулятор 3 мощности, к второму входу которого подключен выход блока 4 ограничения подачи, привод 5 подачи, объект 6 управления(процесс резания на станке совместнос системой СПИД), датчик 7 мощности, первый усилитель 8 сигнала датчика мощности, подсоединенный выходом к второму входу первого элемента сравнения, последовательно соединенные с вторым выходом объекта регулирования датчик 9 вибраций, второй усилитель 10 сигнала датчика вибраций, полосовые фильтры 11 и 12, детекторы 13 и 14, второй 15 и третий 16...
Двухканальный шаговый оптимизатор

Номер патента: 1343391
Опубликовано: 07.10.1987
Авторы: Горный, Метелицын, Мещеряков, Рябцев
МПК: G05B 13/02
Метки: двухканальный, оптимизатор, шаговый
...формируется импульс Ч, строба компараторов, который, поступая с третьего выходаблока 9 на вторые входы блоков 4 и 7,производит перезапись триггеров 38.1,38.2 и 39.1 (фиг, 3). Так как сигнална входах Р этих триггеров не изменился, то в блоке 6 переключения394триггера 41, 1 ц црьч 1 з ц 1 д т и цдцрдвление,1 вижец 11 я в стороцу "бцл 1,111 есохранится (фцг, ), оложцтец 1.цыйФронт импульса Ч (Фиг, 5 и 6) эдпускает в блоке 9 о;1 новибрдтор 53,211 д в 1 гходе которго Формируется им -цу.1 ьс Ч . Импу:1 ьс Ч поступая свторого выходд блока 9 цд второйвход блока 3, производит в нем запускус 11 лителя 22. 2 (Фиг. 2), Фориирую 11 егоимпульс Т, длительность которого11 ЭОПОРЦИОНД 11 ЬЦД ЦДПРЯЖЕ 1 В 1" ЦД Н 11 Х 1 ДЕус 11 цигеля 2.1 блока 2, т,е,...
Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем

Номер патента: 1352453
Опубликовано: 15.11.1987
МПК: G05B 13/02
Метки: амплитуды, вибраций, выдвижным, металлорежущем, станке, шпинделем, экстремального
...шпиндельного устройства.Величина максимально допустимой скорости перемещения узла вычисляется по Формуле: ммакс о мокс Ь40ь мокс . Регулятор 21 управляет скоростью вращения шпинделя в режиме ПИ-регулирования в соответствии с сигналом управления, который приходит от элемента 18. Управление в этом режиме осуществляется в те моменты, когда поступает сигнал "разрешение" с элемента 16При снижении амплитуды вибраций ниже величины А по сигналу от элемента 16 закорачивается регулятор и сигнал с регулятора благодаря выходному фильтру плавно возвращается к нулю,На соответствующие входы блока 23 с пульта системы или из блока памяти через подаются значения предельно допустимых значений оборотов шпикпе 53 4ля (пм, и , ) в соответствии...
Самонастраивающийся электропривод

Номер патента: 1352454
Опубликовано: 15.11.1987
Авторы: Васильев, Суляев, Филаретов
МПК: G05B 13/02
Метки: самонастраивающийся, электропривод
...знаки входных сигналов. С этой целью во входных каналах делителя 9 включены соответственно первый 21 и второй 22 выпрямители. При этом для сохранения работоспособности делителя 9 (с целью недопущения деления на малый сигнал) второй выпрямитель 22 выполнен таким образом, что при уменьшении его входного сигнала ниже установленного уровнявыходной сигнал имеет постоянную минимально допустимую величину.Делитель 9 вычисляет значение момента инерции на основе соотношения Ф1 с,м (- з 18 пЫ, - ) с 1 СИ . 1 с,эм Эмо ЫПри уменьшении скорости движения Ы ниже некоторого допустимого значе-, ния Ь релейный элемент 23 переводит элемент выборки-хранения 24 в режим запоминания. На выходе элемента 24 сохраняется то значение момента инерции,...
Экстремальный регулятор

Номер патента: 1365046
Опубликовано: 07.01.1988
Автор: Дорух
МПК: G05B 13/02
Метки: регулятор, экстремальный
...2, свидетельствующий в этом положении триггера 12 о прохождении максимума слева, проходя через вентиль 3 инвертор 5, элементы И 8 и ИИ 1,поступает на вход сброса триггера 12, перебрасывая его в противоположное состояние, Б результате ключ 14 открывается, а ключ 15 закрывается и очередной импульс генератора 13 возвращает настройку на один шаг,Пусть рабочая точка находится справа от максимума на экстремальной характеристике объекта 9, Б этом случае при открытом ключе 14 и закрытом ключе 15 напряжение на выходе амплитудного детектора 1 ступенчато нарастает, а на выходе дифференциатора 2 формируются положительные импульсы, которые, проходя через вентиль 4 и элементы 7 и 1, поступают на вход сброса триггера 12, поддерживая его в таком...
Адаптивный идентификатор для объекта с запаздыванием

Номер патента: 1365047
Опубликовано: 07.01.1988
Автор: Мышляев
МПК: G05B 13/02
Метки: адаптивный, запаздыванием, идентификатор, объекта
...законрегулирования,Адаптивный идентификатор дляобъекта с запаздыванием работает следующим образом,Входной сигнал Б объекта идентификации задерживается на время с впервом блоке 1 задержки и преобразуется во второй модели 2 объекта, куда подается также сигнал об оценкекоэффициента 1, задержанный во втором блоке 6 задержки также на времяВыходной сигнал первого блока 2умножения об оценке выхода объектаидентификации алгебраически суммируется в сумматоре 3 с выходным сигналом первой модели 4 объекта о корректировке выхода объекта идентификациипо ошибке экстраполяции коэффициентапередачи,11 олученный в сумматоре 3 сигнал сравнивается в первом блоке 7 сравнения с выходным сигналом у объекта идентификации и...
Устройство выбора экстремальных значений токов

Номер патента: 1374178
Опубликовано: 15.02.1988
МПК: G05B 13/02
Метки: выбора, значений, токов, экстремальных
...19, четвертым 20 и вторым 21, третьим 22 неподвижными контактами релятора 23, управляющие входы 24 и 25 которого соединены с входами 4 и 5, первый подвижный контакт 26 45 релятора соединен с выходом 6, второй подвижный контакт 27 релятора соединен с выходом второго источника 28 напряжения, подключается к второму источнику 28, обеспечивающему работу стабилизатора 13 в активном режиме.Таким образом, больший ток 2.1 иэ двух токов 2.1 и 2.2 подается на выход 6 блока 1 и далее - на первый вход блока 1.2, на второй вход которого подается ток источника 2.3. Блок 2,2 выбирает больший ток и подает его на вход блока 2.3. Работа остальных блоков аналогична. Таким образом, на выходе устройства 7 появляется ток, равный току источника тока с...
Многомерная система координатно-параметрического управления

Номер патента: 1381424
Опубликовано: 15.03.1988
Автор: Догановский
МПК: G05B 13/02
Метки: координатно-параметрического, многомерная
...х".(р), (1=2, и) предаточцые функции гив)по и 1-гс) каналов объекта,) управления, скалярцос координатное произведение; (., - = К; - царамстричсские управления; хх,(г чпс(Р) (1 = 2, и) передаточные функции коордицатги)го 6 и параметрических 7 каналов регулятора 5, с, выходная коорди ната 1-и) по номеру рс гулятора 7. Уравцс ция, описывающие работ) системы, записывак)гс в следующем виде:(р) (Х), ), , (р) (Х. ус):С.(.,(с, 1=2;п.Используется стрх кгурцый подход. 11 а основании уравнении сгруктурная схма системы состс)и) из замкнутых контуров: ксц)рдинатцого, прсдставлющего линейный стационарный коцтхр с п редаточцой функцией прямой цпи К,хх,(р) ъ,(р), и параметрических, каждый из к)торььх содержиг в пр- мой пс пи послдов ггльно соединенное...
Система управления для объектов с переменным запаздыванием

Номер патента: 1383291
Опубликовано: 23.03.1988
Авторы: Алферьев, Вязанкин, Кочкин, Шунин
МПК: G05B 13/02
Метки: запаздыванием, объектов, переменным
...нанесения формируется более толстый слой, отличный от номинального на величину Ьс 1. Поэтому для формирования слоя номинальной толщины Й в момент времени с, привод 26 необходимо переключить на задание той скорости, на которой была нанесена номинальная толщина. Определение этой скорости осуществляется в системе управления, причем задержка сигнала цифровым методом моделируется по тому же закону, каким определяется и запаздывание на объекте. Имитация переменного запаздывания Г реализуется посредством звена, имеющего память, в частности ОЗУ 8. Информация задатчика 1,гиТп 10 П(ч) 1ЩЬ) КС20 5 13832 предварительно преобразованная в циф. ровой код, записывается в ОЗУ 8, Переход от одной ячейки ОЗУ к следующей происходит с частотой 1...
Адаптивная система управления для объектов с изменяющимся запаздыванием

Номер патента: 1383292
Опубликовано: 23.03.1988
Авторы: Кулаков, Михалевич, Москаленко, Фурунжиев
МПК: G05B 13/02
Метки: адаптивная, запаздыванием, изменяющимся, объектов
...переходной процесс. На фиг. 1 Й, обозначает внутренние, а Е внешние возмущения, действующие соответственно на вход и выход системы, О- оператор.В основу адаптивной подстройки времени запаздывания положен принцип самонастройки по прогнозируемой модели (2), причей в первоначальный момент работы прогнозируемое значение времени запаздывания равно исходному значению, установленному оператором, а в последующие моменты времени - значениям, полученным в предыдущие циклы адаптации. Адаптация времени запаздывания производится по ФормулеС,(с)с(е; )+ аГ Ы; )= с,(е;).5 13832при 1 " 1 имеет место первоначальныйцикл адаптации В исходном статическом состоянии (первоначальном) системой произведена отработка задания Х, поступающего с задатчика 1,...