G05B 13/02 — электрические
Самонастраивающаяся система управления

Номер патента: 1383293
Опубликовано: 23.03.1988
МПК: G05B 13/02
Метки: самонастраивающаяся
...) -Сх(хТ) (6) получаем выражение для параметра40ДС(3) известен.45Закон управления выбираем в виде Для модели движения (3) закон (8) обеспечивает утойчивое отображенное движение в случае соответствия динамики реального объекта управления выбранному виду индикаторного отоб 55 ражения.Самонастраивающаяся система работает следующим образом (фиг. 1),Блок 5 измерителей определяет текущие фазовые координаты объекта 4 и подает их на вход блока 6 сравнения, где они сравниваются с требуемыми конечными значениями, поступающими из задатчика 14, Разность х-х поступает на вход блока 7 формирования, где осуществляется их преобразование согласно выражению (2) в дискретные моменты С = 1 Т, задаваемые импульсами генератора 12, Значение С заносится на...
Бинарная система управления объектами с запаздыванием

Номер патента: 1383294
Опубликовано: 23.03.1988
Авторы: Емельянов, Коровин, Маланьин, Сизиков, Цветкова
МПК: G05B 13/02
Метки: бинарная, запаздыванием, объектами
...где (1 ) = сх, (1;) ++4 сл- х )- (т) + х р 15(й) = 6)1 И);= = сопятО;в-а в+аяа ЦЕ (Н система управления обеспечивает следующую оценку на х(1):Ь )х;(1)1 Мх (С,) е: -УМ = сопяТО,а, следовательно, и решение поставленной задачи управления.Бинарная система работает следующим образом.Сигнал у И) с выхода задатчика 3 сравнивается с сигналом у(1) с вихода объекта 1 управления в блоке 2 сравнения. Полученный сигнал ошибки х(т,) поступает непосредственно на вход, второго усилителя 8, и на вход первого модульного элемента 5 а на входы вторых усилителей 8 ,8 ,, 8 и первых модульных элементов 5,55 ) поступает через дидхЪеренциатори соответствующих порядков 4, 4,еее,4,.Сигналы с выходов первых модульных элементов 5,5 5подаются на входы первого...
Система идентификации параметров многомерного нелинейного динамического объекта
Номер патента: 1385122
Опубликовано: 30.03.1988
Авторы: Иванов, Перфильев, Цуканов, Шустов
МПК: G05B 13/02
Метки: динамического, идентификации, многомерного, нелинейного, объекта, параметров
...параметров ао т- (а, а, ,а ) и выдача этого значения вектора параметров на выход блока. Это значение поступает на соответствующие параметрические входы всех моделей 1 и 2, в результате че" го во всех моделях устанавливаются начальные значения параметров а .Ц=о 1 =1,ш). Причем в каждой 1-й вспомогательной модели 2 значение параметра а устанавливается с малым приращекием Л а;, поступающим на соответствующий сумматор 15 отклонений. После выставки заданных значений параметров во всек моделях системы на первом выходе блока 12 команд появляется кратковременный управляющий сигнал 11, поступающий на стартовые входы блока 7 вычисления функционала, всех блоков 8 вычисления частных производных, блока 11 контроля сходимости и блока 5 памяти. По...
Квазиинвариантный финитный регулятор с переменной структурой

Номер патента: 1385123
Опубликовано: 30.03.1988
Автор: Рустамов
МПК: G05B 13/02
Метки: квазиинвариантный, переменной, регулятор, структурой, финитный
...д, При этом узел памяти работает как повторитель и входной сигнал ах без изменения проходит на выход элемента 5 памяти. При Ч= - 1 ключ 4 переходит в положение 6 и вход элемента 5 памяти блокируется, При этом узел памяти работает в режиме запоминания и на выходе элемента памяти 5 формируется постоянный сигнал ах 1 соответствующий значению входного сигнала ах в момент размыкания ключа 4. Выход узла 3 памяти через инвертор 6 напрямую соединен соответственно с сигнальными входами б и а коммутатора. При командном сигнале Ч= +1 ключ коммутатора находится в нормально замкнутом положении а, а при Ч= - 1 переходит в положение б. Выходной сигнал с коммутатора подается на второй вход сумматора 8, выход которого является выходом...
Прогнозирующий регулятор

Номер патента: 1386958
Опубликовано: 07.04.1988
Авторы: Киселев, Мышляев, Нугаев, Уланов
МПК: G05B 13/02
Метки: прогнозирующий, регулятор
...- (4) вьби-.раются следующим образом Ко 1/К Кв К, =К =; К =Кс/и; К 8 1 -К = -19 1 ц то уравнение (2) эквивалентно уравнению (5). Тем самым известный и пред. лагаемый прогнозирующие регулято ры эквивалентны.В предлагаемом прогнозирующем регуляторе сигнал корректировочного правления 3 Б(ь) формируется следующим образом.В третьем сумматоре 17 из сигнала Б(.) вычитается выходной сигнал первого блока 11 задержки, умноженный на коэффициентв третьем масштаб- рующем блоке а палученньй снал суммируется с выходным сигалом тьего сумматора 17, умноженнымкоэффициентво втором масштабирую ) ;щем блоке 18 и задержанным на время во втором блоке 20 задержки.В четвертом сумматоре 13 выходной сигнал экстраполятора 5, умноженный на коэффициент Кв в...
Цифровая система регулирования частоты вращения двигателя постоянного тока

Номер патента: 1386959
Опубликовано: 07.04.1988
Авторы: Лещенко, Ольшевский, Фурман
МПК: G05B 13/02
Метки: вращения, двигателя, постоянного, цифровая, частоты
...переключений. При нарушении равенства частот триггер 15 переключается с частотой, ран ной меньшей из сравниваемых частот, оставаясь по времени преимущественно в том состоянии, которое подтверждается импульсами большей из частот.1 5 При Г ) в , Г триггер преимущестненосно находится в состоянии единицы, устанавливаемом по Б-входу, Различие н скважности напряжения на прямом и инверсном выходах триггера 15 и являет ся тем признаком, который используется в качестве сигнала рассогласования в описываемом следящем преобразователе,На первые входы элементов И 1 б и 25 17 подаются управляющие сигналы с выходов триггера 15. На их вторые входы подана выходная частота преобразователя 22 Г , . Таким образом, количество импульсов частоты Го которые по...
Устройство экстремального управления

Номер патента: 1388827
Опубликовано: 15.04.1988
Автор: Джус
МПК: G05B 13/02
Метки: экстремального
...за счет пауз при искрениях,При этом экстремальная точка в процессе работы меняет свое положениевследствие изменения характеристикпыпегаэсвого потока,Тактирующие импульсы на блок 13поступают с задержкой эбусповленной 50блокэм 10. За время этой задержкиключ 7 осуществляе. сброс интеграто=ра .6, После сброса с задержкой,обеспечиваемой блоком 11 для осуществления этого сброса, сдновибратор 5512 на определенное время включаетключ 8 и интегратор 6 измеряет интеграл напряжения на выходе датчика 3,т.е, определяется среднее напряжениеза укаэанный период, которое запоминается интегратором 6, Вслед за этимосуществляется шаг самонастройки порезультатам предыдущего сравнениясреднего напряжения с выхода фильтра4 и значения запоминающегося...
Динамический фильтр

Номер патента: 1388828
Опубликовано: 15.04.1988
Автор: Леденев
МПК: G05B 13/02
Метки: динамический, фильтр
...скорости изменениявходного сигнала 1;выходной сигналинтегрирующегоблока б;выходнои сигналапериодическогозвена 7;выходной сигналсуммирующего блока 8 (выходнойсигнал Фильтра);постоянная времени апериодического звена 7;коэффициент передачи интегрирующего блока 6. где я - величина, на.которую отличается истинное значение скорости полезного сигнала Х от заданной Хч.С учетом (2) из соотношения (1) имеем У, Х+1 ц(Р) Р +1 (Р) 0 (3)где И(р) =АС )в(р) ф+(КК Кь К, 1 в1 К Кд)рь (14) Е (р)=р .ТК р +(ТК К +(ТК +К р + Динамический фильтр, содержащийэадатчик скорости изменения вход О ного сигнала, интегрирующий блок ипоследовательно соединенные и звеньев,каждое из которых содержит сумматор,интегратор и последовательно включенные сравнивающее...
Система регулирования объекта с запаздыванием

Номер патента: 1397875
Опубликовано: 23.05.1988
Авторы: Авдеев, Анисимов, Катунин, Коровин, Кошелев, Мышляев, Сизиков, Соловьев
МПК: G05B 13/02
Метки: запаздыванием, объекта
...23 сравнения из си- нала Уакс, с выхода второго экстраполятора 27 вычитается сигнал Б Фмин ормула изоб етес выхода первого экстраполято 25р ния35сигнал о полученной разности умножа- Система егется на вели у 1/2а- истема регулирования объекта сби ечину во втором масштау - запаздыванием, содержащая первыйирующем блоке 19 и подается на вто- фильтр низкой часторой сумматор 15. В первом суммато еильтр низкой частоты, первый экстра 20 сигналы 1.1 и 13аторпервом сумматоре полятор, первый сумматор первыйалгебраически 40 датчик, блок элементов задержки поЭсуммируются, затем ревультирую йов задержки, порующи следовательно включенные исполнительсигнал умножается в первом масштаби- ный блок о ектчитается в т етьем брой датчик, первый блок...
Система управления участками производства

Номер патента: 1399699
Опубликовано: 30.05.1988
Авторы: Авдеев, Зимин, Левинец, Мышляев, Сарапулов, Семиколенов, Соловьев
МПК: G05B 13/02
Метки: производства, участками
...на вход первогорегулирующего блока 26, который вырабатывает сигнал, управляющий третьимисполнительным блоком 10, В результате из промежуточной емкости 9 третьимисполнительным блоком 10 подается навторой участок 7 через сумматор 6недостающее количество материала,Для выработки управляющего воздействия ц, (с) на первый участок 3 снача"ла восстанавливается .с запаздыванием, в первом транспортере 4 образцовоеуправляющее воздействие Б,(С-с, ) первого участка 3 без учета количестваматериала, требуемого для поддержаниязапасов в промежуточной емкости 9. Сэтом целью вьжодной сигнал Я(с) четвертого датчика 12 задерживается впервом блоке 31 задержки на время с,и вычитается во втором блоке 32 сравнения из выходного сигнала Б(С) четвертого сумматора...
Следящий электропривод с переменным моментом инерции

Номер патента: 1406565
Опубликовано: 30.06.1988
Авторы: Бузанева, Довгань, Иваненко, Казачковский, Клисенко, Крюков, Мусиенко
МПК: G05B 11/01, G05B 13/02
Метки: инерции, моментом, переменным, следящий, электропривод
...переменным моментом инерции имеет следующий вид:Умножив и разделив второе слагаемоев правой части уравнения движения наЙг. и учитывая, что Йц/дг =о, получаем уравнение движения в следующемвиде: йы а а 1 (Ч)М-М (с) = 1 (Ю)- -- +с 7. с 1 г 2 дГ Из этого уравнения следует, что М-М (с)-1 (ц) 1.с 1 ( Ч) 2 ас 1 Еый шгБь.оз ф где ш г- масса звена;- расстояние от оси вращениядо центра масс;- ускорение свободного падения;1 - КПД и передаточное отношение передачи;ч - . угол поворота звена - сигнал датчика 10 положения,На третий вход сумматора 12 поступает сигнал с выхода второго блока16 умножения, на входы которого подаются сигналы с выхода интегратора14, и с выхода блока 15 определенияпроизводной, сигнал на входе которого пропорционален скорости...
Устройство для определения экстремума

Номер патента: 1411707
Опубликовано: 23.07.1988
Авторы: Гавриш, Петросов, Шваченко, Ширинов
МПК: G05B 13/02
Метки: экстремума
...21 иосигналам тактовых импульсов, управляемых счетчиком 12, подключенным куправляющим входам селекторон-мультиплексоров 21, к входам элементовИ 22 и 23 последовательно подключается, начиная со старшего разряда,текущая и запомненная информация.Пока текущий код больше запомненногозначения, на выходе элемента И 22 появляется сигнал, равный единице, который через выходной элемент И-НЕ 25,на второй вход которого подан сигнал,равный единице, с выхода ВБ-триггерапроходит на выход При появлении экстремума на выходе элемента И 23 появляется сигнал, равный единице, Этотсигнал поступает на Б-вход ВБ-триг- -гера. На выходе ВБ-триггера сигнал равен нулю, он запрещает прохождение навыход сигналов сравнения промежуточных разрядов, При этом на...
Система идентификации параметров объекта
Номер патента: 1413597
Опубликовано: 30.07.1988
Авторы: Андреев, Балонин, Гусев, Попов, Сироткин, Усов
МПК: G05B 13/02
Метки: идентификации, объекта, параметров
...объекта идентификации 2 имеет видХ-М 1 Х, + ы Х +,. +мХ+л л л+П, + /321 У ++ р сУ, (6)35 где Х " выходной сигнал модели(оценка фазовой скоростих).1 Устройство вычитания 3 формирует 40 разность поступающих на его входы сигналов фаэовой скорости Х объекта идентификации 1 и ее оценки 1, вырабатываемой моделью 2. Устройство выделения абсолютной величины 4 форми рует модуль этой разности- ( х- х).Этот сигнал поступает на вход компаратора 14, На другой его вход пос тупает формируемый сумматором 13 сигнал пропорциональный взвешенной сумме модулей входных сигналов объекта 1 и его фазовых координат,р = , К,Ц;+ - К, 1 Х;,где Кв., К. - постоянные коэффи-.1циенты. 974Сигналыц; 1 иХ, 1 формируютсяблоками модуля 11 и 12 по поступающим на их входы...
Экстремальный регулятор для резонансного объекта

Номер патента: 1413598
Опубликовано: 30.07.1988
Авторы: Вострухин, Гейченко, Киямов, Озеров, Охитин, Петренко, Петриди, Статников, Токарев, Шафигуллин
МПК: G05B 13/02
Метки: объекта, регулятор, резонансного, экстремальный
...интервал между двумя локальными экстремумами, который обуславливается частотой пульсаций П . Так, после прохождения первого локального экстремума на интервале времени отдо 1 импульсы Б с выхода второго элемента сравнения 5 отсутствуют. Детектор пропадания импульсов 6 настроен на больший интервал времени и поэтому сигнал с его выхода отсутствует. В моментФвремени й, происходит новый подзаряд конденсатора, когда амплитуда сигнала Б, вновь начинает расти. Импульс П с выхода второго элемента сравнения 5 регистрируется детектором пропадания импульсов б,.импульс Ю на его выходе отсутствует, процесс увеличения частоты колебаний продолжается до достижения резонансной частоты. При выходе системы на резонансную частоту (точка А на фиг.2...
Самонастраивающаяся система управления
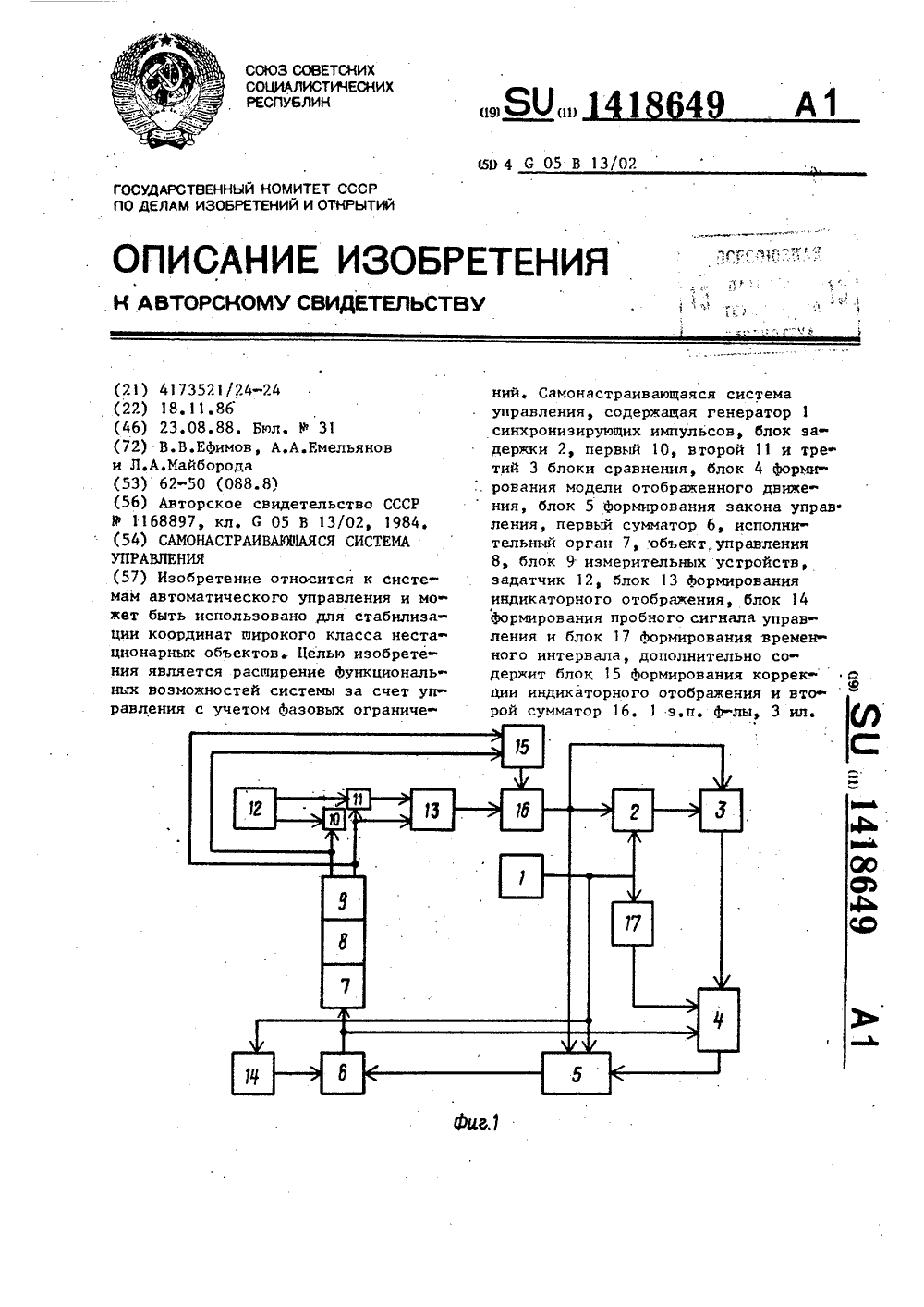
Номер патента: 1418649
Опубликовано: 23.08.1988
Авторы: Емельянов, Ефимов, Майборода
МПК: G05B 13/02
Метки: самонастраивающаяся
..., )+ (х, - ххода сумматора 23 поступает на блок 24, где производится извлечение квадратного корня, Полученный сигнал 4 О с выхода блока 24 следует на первый вход блока 25 и второй вход блока 30 на первый вход которого с выхода, сумматора 29 поступает результат сложения хранящихся в блоке 18 конс таитвеличин К и У . Блок 30.осущест-вляет Ьормирование разности сигналов 1(х -х + (х- х) . (К+ 9 поступающей затем на релейный эле- бО мент 31, Поступивший на первый вход блока 25 результат извлечения квадратного корня сравнивается со значением К, поступающим с третьего выхода блока 18 констант. Затем результат сравнения поступает на блок26 деления, на второй вход которого с блока 18 поступает сигнал Я, в результате чего на выходе делителя Лор...
Устройство для адаптивного управления металлообработкой

Номер патента: 1423978
Опубликовано: 15.09.1988
Авторы: Алешин, Головко, Рубашкин, Сокол
МПК: G05B 13/02
Метки: адаптивного, металлообработкой
...скорость перемещения детали 8, . При этом Из (2) и (3) следует, что что соответствует сигналу управленияна входе привода, определенному формулой (1), Следовательно, при рассмотренной организации управленияобеспечивается нулевая ошибка стабилизации силового параметра.Кроме повьппения точности в устрОЙстве всегда соблюдается условие устойчивости в статическом и квазистатическом режимах,При возмущающих воздействиях, близких к ступенчатому, когда скоростьизменения силового параметра, изме"ряемая блоком 13, превьппает пороговоезначение установленное блоком 12,пороговый элемент 11 снимает запретс блока 3, в результате чего восстанавливается обратная связь на второйвход сумматора 4, При этом восстанав-"ливается пропорциональное...
Система управления

Номер патента: 1423979
Опубликовано: 15.09.1988
Авторы: Каляев, Лукьяненко
МПК: G05B 13/02
...объекта регулирования 1 с помощью гидроприводахоцные сигналы измерителя 6 рассогласования и усилителя 8 и сигнал, проходящий через детектор 10, плавноуменьшается да нуля. Всегда подключенный нижний канал сигнала рассоглассвания вмес е с исполнительным механизмом 2 настроен ка апериодическийзакон регулирования, который всегдаустойчив и не дает перерегулирования.Таким образом если нижний каналсигнала рассогласования имел коэффищент усиления по тракту 30, то система в зоне фазового запаздывания работает в диапазоне коэффициента усиления 30-1500 без автоколебаний.Если по каким-то причинам сигнал обратной связи больше сигнала за.дания, то на выходе усилителя 8 появляется усиленный сигнал рассогласования отрицательной полярности, который не...
Самонастраивающаяся система управления

Номер патента: 1425600
Опубликовано: 23.09.1988
МПК: G05B 13/02
Метки: самонастраивающаяся
...где складываются.Сигнал 8, у с выхода первого блока 5суьпчирования поступает яа первый входтретьего блока 7 суммирования. Сигна"лы у,(с-)у,(1-,)с выходов блока 3 запаздывания через время, равное времени запаздывания поступаютяа соответствующие входы второгоблока А задания коэффициентов, гдепроисходит умножение сигнала у,(1:-)(.:=1,щ)с х-го выхода блока 3 за"пяздываяия на постояяжи коэфициеятСигналы 8 у И-) ;В у,(И"- ь) с выходов второго блока ц задания коэффициентов поступают на соответствующие входы второго бпока 655суммирования где складываются. Сигнал я ( с) с выхода второго блокг 6 суммирования поступает на второй вход третьего блока 7 суммирования, где складывается с сигналому, поступающим с выхода первого блока 5...
Цифровая самонастраивающаяся следящая система

Номер патента: 1425601
Опубликовано: 23.09.1988
Авторы: Лебедев, Морщихин, Шароватов
МПК: G05B 13/02
Метки: самонастраивающаяся, следящая, цифровая
...модели 20 Ущ(п) поступают, соответственно, на второй и первый входы первогосумматора 1, на котором вычисляетсяих динамическое рассогласование (невязка) 9 (п) = У (и) - У(п) .При отклонении параметров элементов системы от исходных значений сигнал динамического рассогласования отличен от нуля, что инициирует работу блока 12 управления реверсивным счетчиком, который анализирует знак величины где В8, 6- максимальное, минимальное и амплитудное значение невязки на интервале собственных колебаний системы.Алгоритм настройки несущей частоты напряжения питания двухфазного асинхронного двигателя определяется рекуррентным соотношением Е(п+1) = Г(п)+ьГ вЦп К где и - номер шага настройки частоты; Ь Г - шаг настройки частоты, выбираемый из условия...
Устройство для определения экстремальных значений электрических сигналов

Номер патента: 1425602
Опубликовано: 23.09.1988
Авторы: Гавриш, Исмаилов, Лебедев, Шваченко
МПК: G05B 13/02
Метки: значений, сигналов, экстремальных, электрических
...на входе 20 устройства больше предыдущего значения аналоговогосигнала, то количество импульсов, поступивших в счетчики 8 и 9 н режимеобратного, счета, больше количестваимпульсов, поступивших в счетчики 8и 9 в режиме прямого счета, поэтомув какие-то моменты времени на выходах обнуления счетчиков 8 и 9 появляются сигналы логического О 0 которые устанавливают триггеры 10 и 11в единичное состояние,Если в момент времени(фиг.2)на прямом выходе генератора 18 устанавливается логический "О", то на выходе первого формирователя 16 импульсон формируется единичный импульс,который пос 1 упает через элементыИ 12 и ИЛИ 6 на вход установки "0"первого счетчика 8, сбрасывая его внулевое состояние, а во втором счетчике 9 сохраняется разность...
Самонастраивающийся регулятор

Номер патента: 1432458
Опубликовано: 23.10.1988
Авторы: Борисов, Косаганов, Кузин, Николаев, Павлухин
МПК: G05B 13/02
Метки: регулятор, самонастраивающийся
...пропорциональныйаф И,)( +",): (ф + фл ( )7д, дК. фкоторый поступает на вторые входыблоков 45-47 умножения.На первый вход блока 45 умножедфния поступает сигнал --- с выходадК,блока 27 умножения. На выходе блока45 образуется сигнал К,(1 + ), который поступает на вход интегратора 51, на выходе которого образуетсясигнал К,(Т + ".), который затем поступает на второй вход блока 8 умножения,На первый вход блока 46 умноженияРфпоступает сигнал --- с выхода блоак 7ка 38 умножения. На выходе блока 46образуется сигнал К(С + ), которыйпоступает на вход интегратора 52, навыходе которого образуется сигналК 7(В+ л ), который затем поступаетна второй вход блока 7 умножения.На первый вход блока 47 умноженияафпоступает сигнал -с выхода блоЙКка 9...
Адаптивный регулятор

Номер патента: 1432459
Опубликовано: 23.10.1988
Авторы: Бабец, Сокур, Сологуб, Хорольский, Хорошенький, Яковлев
МПК: G05B 13/02
Метки: адаптивный, регулятор
...плоскости, 80 сравнения,32459 8 5 10 Таймер 25 работает следующим образом.При поступлении на управляющий . вход аналогового ключа логической единицы сигнал Пчерез ключ 70 поступает на вход интегратора 71, сигнал на выходе которого возрастает пропорционально времени. Сброс интегратора производится по сигналу с выхода нуль- органа 24.Блок 26 выдержки времени работает следующим образом.На вход масштабного блока 72 поступает сигнал оценки постоянной времени на предыдущем шаге идентификации Т (и). Масштабный блок 72 имеет коэффициент передачи 0,2, таким образом, на первый вход блока 73 сравнения поступает сигнал 0,2 То(п). При поступлении на входы блока 76 элементов И сигналов на выходе его устанавливается уровень логической единицы,...
Адаптивная диагностическая система

Номер патента: 1441350
Опубликовано: 30.11.1988
Авторы: Глумов, Горбатенков, Земляков, Рутковский, Силаев
МПК: G05B 13/02
Метки: адаптивная, диагностическая
...блоков 20 поступают на соответствующие п входов объекта управления, формируя сигналы р , ., Р для каждого модуля: 1441 7ходных сигналов его равны нулю илишь сигнал на Ь;-м выходе равенПервые вьмоды всех щ демультиплексоров 1 б поступают на соответствующиеш входов первого элемента ИЛИ 17,вторые выходы - на соответствующие швходов второго элемента ИЛИ 17 и т.д.Таким образом, если Ь;-й модуль отказал, то на л.-м входе Ь -го элемента ИЛИ из первой группы элементовИЛИ 17 будет сигнал 1.4 О, а наостальных входах - нулевые И = 1,ш).На выходе Ь -го элемента ИЛИ 17 будетсигнал ., который поступает на первый вход 1.,-го элемента И 18. Тогда,если Ь,4, 1 , Ь (К (ш) - адресаотказавших модулей, то на выходах1.,-го, Ь,-го, , 1.-го элементов.ИЛИ 17...
Устройство управления процессом металлообработки

Номер патента: 1442974
Опубликовано: 07.12.1988
МПК: G05B 13/02
Метки: металлообработки, процессом
...обработки для стабилизации мощности резания изменяются угловая скорость я и выходной сигнал усилителя 7. Сигнал затвора(Т р+1) (Тр+1)где К - передаточный коэффициенткгдатчика скорости приводаподачи;К е - передаточное число редуктора привода подачиК - передаточный коэффициентумдатчика мощности; 40Т - постоянная времени датчикамощностиСигнал с выхода датчика 3 скорости поступает через резистор 8 на инверсный вход усилителя 7.Выходной сигнал усилителя 7 изменяется с задержкой при переходных процессах с помощью конденсатора 14. Насыщение полевого транзистора 13 определяет стабилизируемый сигнал на выходе усилителя 7. Последующий рост напряжения О приводит к изменению сигнала на выходе усилителя 7, которое пропорционально ошибке регулирования...
Система автоматического регулирования положения

Номер патента: 1444711
Опубликовано: 15.12.1988
Авторы: Альтшулер, Васюхно, Волков, Орлов, Рубан, Филатов
МПК: G05B 13/02
Метки: положения
...выходе модулятора б отсутствуют, блок 17 формирует,например, высокий логический уровень.При этом на управляющий вход мостового переключателя 8 поступает сигнал с компаратора 12. Выходное напряжение задатчика 13 регулируется впроцессе наладки и в простейшем случае равно нулю, Тогда полярность выходного сигнала компаратора 2 (знакопределяется из условия осуществления отрицательной обратной связи) зависит от знака сигнала рассогласования на выходе датчика 1. Б простейшем случае схема 7 может содержатьтолько мультиплексор 14 и блок 17, ивыход нагрузки мостового переключателя 8 может быть соединен непосредственно со входом датчика 10,Таким образом, при возникновениинеисправности АЦП 2 или модулятора 6система продолжает...
Самонастраивающаяся система с приводом на муфтах

Номер патента: 1444712
Опубликовано: 15.12.1988
Авторы: Благодарный, Борцов, Второв, Зеленков, Невесенко, Поляхов, Путов, Яковлев
МПК: G05B 13/02
Метки: муфтах, приводом, самонастраивающаяся
...11 по второму вхо - 20 ду ошибка между выходными сигналами блоков 13 и 8 всегда близка к нули.Следовательно, выходной сигнал интегратора 13, янляищегося моделью механической части приводя, отслеживает 25 значение скорости привода, а это означает, что выходной сигнал блока умножения 12 пропорционален моменту, передаваемому приводом.В начале разгона привод работает З 0 при больших значениях тока, поэтому нелинейные элементы 2 б и 27 входят в ограничение, т.е. на их выходах формируются постоянные сигналы, амплитуды которых олределяится параметрами35 ограничительных элементов 16 и 18, Эти параметры выбираются таким образом, чтобы отношение уровней ограничения усилителей 17 и 15 было равно примерному значению коэффициента переда чи блока...
Двухканальный экстремальный регулятор

Номер патента: 1444713
Опубликовано: 15.12.1988
Авторы: Данилов, Ивлев, Старик, Сулайманов
МПК: G05B 13/02
Метки: двухканальный, регулятор, экстремальный
...1 А траектории 22, на фиг.5 - графики 25-29 на интервале времени С,-с между импульсами триггера 4.Медленному разряду конденсатора 4 (график 27) соответствует аналогич ное изменение напряжений 11, О (график 28) и У (график 29). ОсобенностьРезистор 1 б служит для предотвращения шунтирования поискового сигнала низкоомным выходным сопротивлением повторителя 15. Совместно с резистором 10 он образует делитель напряжения, необходимый для выравнивания напряжений, приходящих на вход усилителя 11 с делителя 9 и повторителя 15. В противном случае при "перезаписи" напряжения.с выхода делителя 9 на конденсатор 14 и передаче его через повторитель 15 произойдет скачок величины этого напряжения,так как коэффициенты передачи блоков 12, 13 .и 15...
Система управления с переменной структурой

Номер патента: 1448337
Опубликовано: 30.12.1988
МПК: G05B 13/02
Метки: переменной, структурой
...в системе.Для определения реальнь 1 х параметров 110(Б,) в системе с перемеНной структурой применяются первая и вторая модели объекта, причем первая модель 8 объекта уг 1 равления реализует эталонную реакцию объекта, зависящую от начальных условий в момечт коммутации управляющего воздействия, вторая. модель 16 объекта управления реализует эталонную реакцию объекта на ступенчатое воздействие и представляет собой его эталокную переходную Функцию. Реальная переходнаяФункция объекта управления образуется на выходе первого вычитаю- щего устройства 9 как результат вычитания из общей реакции объекта, той ее части, которая соответствует ненулевым начальным условиям в момент коммутации управляющего воздействия ка выходе...
Адаптивная система автоматического управления для нестационарных объектов с запаздыванием

Номер патента: 1451644
Опубликовано: 15.01.1989
Авторы: Као, Нгуен, Пичугин, Рауль
МПК: G05B 13/02, G05B 13/04
Метки: адаптивная, запаздыванием, нестационарных, объектов
...времени 61между импульсами на выходах дифференцирующих устройств 9 и 10. Ь г. = пТ, где и - количество импульсов; Т - период импульсов; ЬС э - время задержки объекта управления и модели, которое вычитается сумматором 31 из времени за-. держкихранимом в регистре 29, и передается на информационный вход регистра 29-Аг.зЭлемент И 32 по сигналам с второго выхода счетчика 35 и выхода элемента ИЛИ 37 формирует сигнал. по переднему фронту которого Формирователь 20 формирует сигнал управления, в регистр 29 записывается значение с., времени задержки, а по заднему фронту происходит установка в нулевое состояние счетчиков 34 и 35 и триггера 36. В том случае, если на входы элемента ИЛИ 37 первым поступает импульс с выхода второго...
Система управления инерционным экстремальным объектом

Номер патента: 1456930
Опубликовано: 07.02.1989
Автор: Черкашин
МПК: G05B 13/02
Метки: инерционным, объектом, экстремальным
...с последующим усреднением на периоде пробного воздействия, на выходе Фильтров 12 лл 5930412 лл получают сигналы Е,(11М), пропорциональные произведению частной производной экстремальной характеристики нелинейной части 5 на значение мнимой части частотной характеристики линейной части 4 объекта на частотах гармонических составляющих сигнала пробн 6 Го 10 воздействия, т,е. 15 решив которую, находят неизвестные параметры линейной части объекта 3Статический коэффициент усиления модели, полученный таким образом, связан со статическим коэффициентом линейной части объекта следующим сботнощением:лк= - Ы-. к,35 дх лгде К и К - значения истинного коэффициента усиления и его модели,соответственно,40 Параметры модели 17 линейной. части объекта...