Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1300412
Автор: Орещенко

Текст
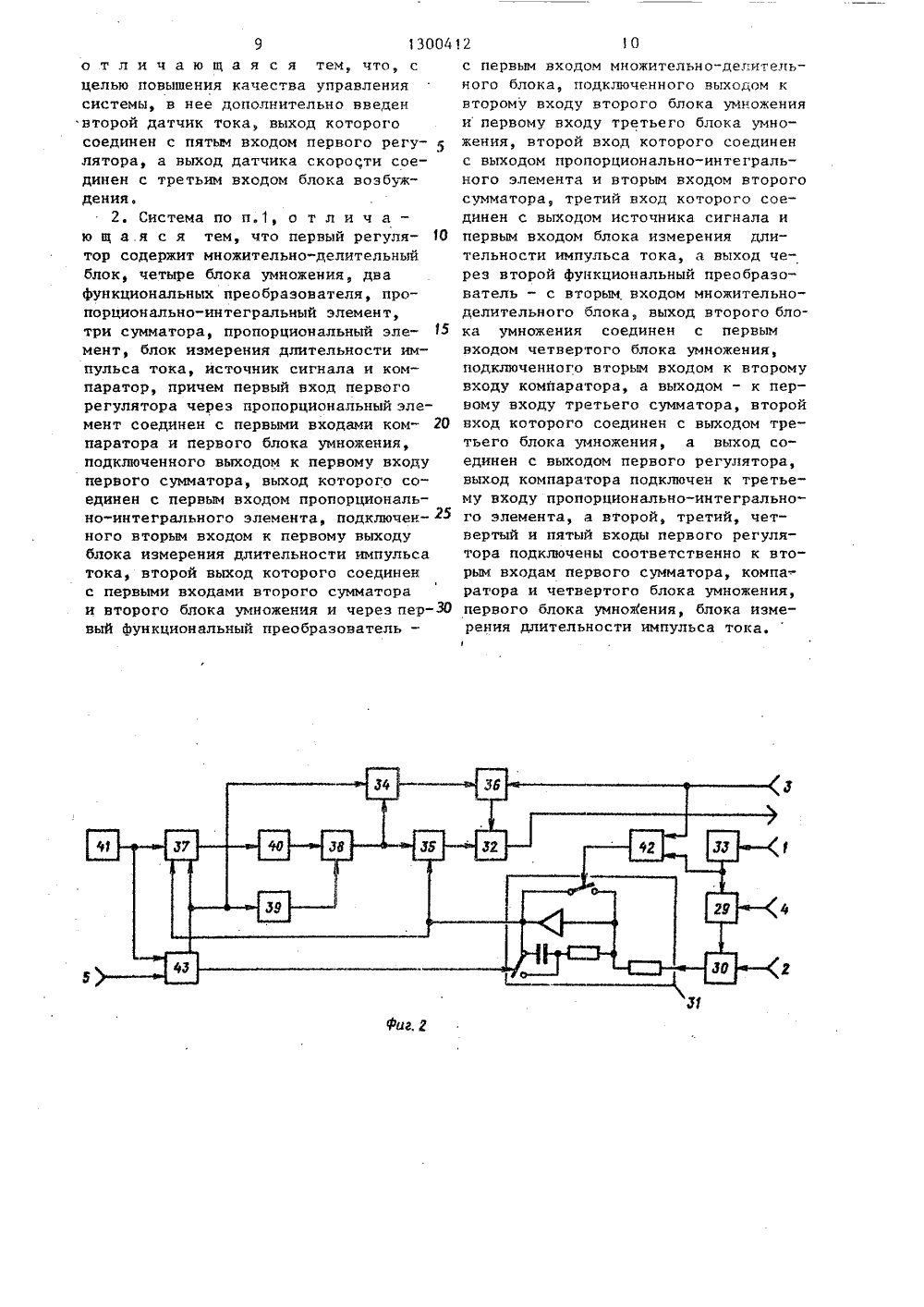
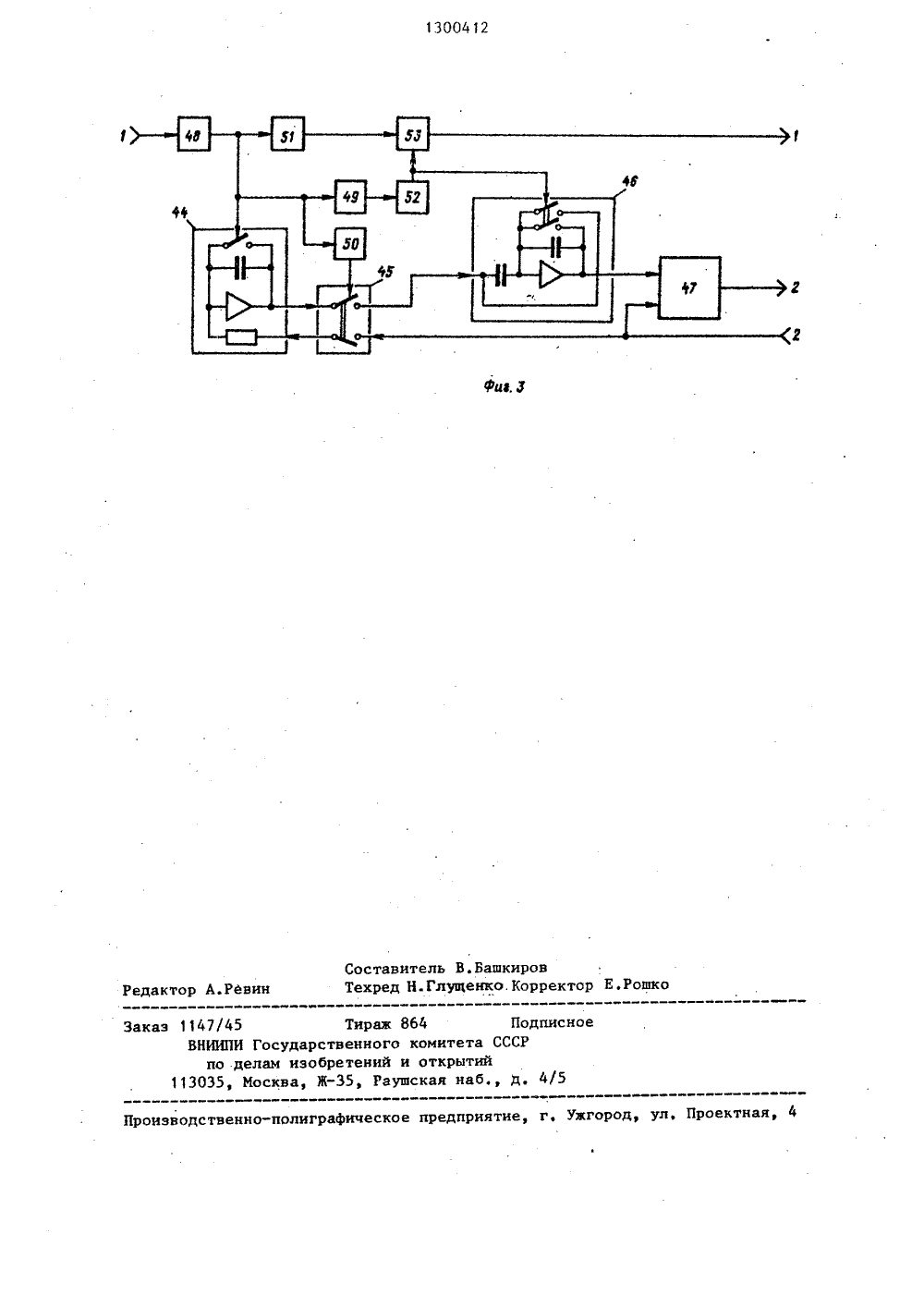
СООЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН 19) 111) И) 4 С 05 В ИОАННЕ ИЗОБРЕТЕНИ ЬСТ АВТОРСНОМУ СВИ-24 ГОСУДАРСТВЕННЫЙ КОМИТЕТ ССПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ(71) Новокузнецкое отделение Всесоюзного научно-исследовательского, проектного и проектно-конструкторскогоинститута по комплексной электрификации промышленных объектов "Тяжпромэлектропроект" им, Ф.Б.Якубовского(57) Изобретение относится к автоматике, является усовершенствованиемизобретения по авт.св. Р 1138787 иможет быть использовано для управления промышленными электроприводами.Цель изобретения - повышение качествауправления при использовании в качестве усилителя мощности управляемоговыпрямителя. Для достижения цели изобретения в самонастраивающуюся системууправления дополнительно введен второй датчик 28 тока, выход которогосоединен с пятым входом первого регулятора 2, а выход датчика 6 скоростисоединен с третьим входом блока 12возбуждения. 1 з.п. ф-лы, 3 ил.1 13004Изобретение относится к автоматике и может быть использовано для управления промышленными злектронриводами.Цель изобретения - повышение качества управления при использовании в качестве усилителя мощности управляемого выпрямителя.Возможности достижения положительного эффекта при использовании прецлагаемой самонастраивающейся системы управления вытекают из следующего анализа.Среднее значение тока якоря в многофазных схемах выпрямления определяется выражением15 где М Еугол управления;амплитудное значение фазыпитающего напряжения;ЭДС двигателя;активное сопротивление якорной цепи злектропривода;число фаз питающего напряжения;среднее значение тока якоряна интервале дискретностиуправляемого выпрямителя;длительность импульса токаякоря,Е К где Анализ уравнения (7) показывает,что изменение сигнала с 6 на входе35 управляемого выпрямителя обратно пропорционально величине 1(М,Ъ) и обеспечивает независимость величины 1 ,отпараметра 3, следствием чего являетсянезависимость динамики системы управ 40 ления от величины статического момента на валу двигателя, т.е, от харак"тера тока в якорной цепи вентильногоэлектропривода,На фиг.1 изображена функциональная45 схема самонастраивающейся системыуправления; на фиг.2 - функциональнаясхема первого регулятора; на фиг.Зсхема одного иэ возможных вариантовреализации блока измерения длительно 50 сти импульса тока. шаГ 2 .1 =- - Е - э хп - сов (- -- м) -Е, (1)Р 2 ЛК ъ 2Р 2 В зоне прерывистого тока (область малых значений нагрузки на валу двигателя) индуктивность Ь якорной цепи электропривода косвенно через параметр Ф влияет на среднюю величину тока 1,р якоря, обеспечивая нелинейную зависимость 1 от угла М, управления и длительности 3. импульса тока. 27В зоне непрерывного тока Ъисреднее значение 1 тока якоря определяется при прочих равных условиях величиной К, При этом индуктивность 1 якорной цепи проявляет себя по отношению к 1 как апериодический фильтр первого порядка с постоянной Ьвремени Т- =-. С учетом изложенного, К 12 2Сравнение уравнений (1) и (2) показывает, что в зоне прерывистого тока ЭДС управляемого выпрямителя определяется уравнением Е =Е - зп - . сов (- -- -К), (4)2 3" 2 тп 2а среднее значение тока якоря для заданных значений Е и Е определяется сопротивлением якорной цепи, значение которого определяется уравнением в =- - . Б)% щНелинейная зависимость величин Еь и В, от параметра 3 дестабилизирует динамику системы при работе в зоне прерывистого тока (при работе в зоне малых нагрузок на валу двигателя).Анализ уравнения (1) показывает, что если на вход управляемого выпрямителя подать положительный сигнал Е Е 9Б,=,=: - - --- , (6)е Е 2 Е К(ЖЪ) то среднее значение тока якоря перестанет зависеть от величины Е и будет определяться уравнением ГЬ,Э), (7) 1(ы,9)=вп-соэ(- -- -О). (8) Т 2 в 2уравнение (1) в зоне непрерывного тока примет вид:т с -+ 1 (г.)=-(Е -Е) (2) И) 1 ф д й ер 1 8 фЕВ=Е - зхп - сов об, (3)Вгде Е ь - ЭДС управляемого выпрямителя . Самонастраивающаяся система управления содержит первый сумматор 1, пер.вый регулятор 2, усилитель 3 мощнос ти, электродвигатель 4, первый датчик5 тока, датчик б скорости, датчик 7 ЗДС, датчик 8 тока возбуждения, упругую механическую передачу 9, технологический механизм 10, датчик 11 ско12 пользовать ресурсы двигателя по напряжению якоря.Второй датчик 28 тока отличается от первого датчика 5 тока основного изобретения тем, что имеет более высокий коэффициент передачи и обеспечивает на своем выходе сигнал, пропорциональный току якоря только в области малых токов, соответствующих зоне прерывистого тока с некоторым превышением последней, При дальнейшем увеличении тока якоря выходной сигнал второго датчика 28 тока ограничивается на, достигнутом уровне.Самонастраивающаяся система управления работает следующим образом.Блоки 29 и 34 - 36 умножения обеспечивают на своих выходах сигналы, пропорциональные произведению сигналов, поступающих на их входы.На выходе второго блока 34 умножения Формируется сигнал, пропорциона" льный величине ЮПервый регулятор 2 содержит первый блок 29 умножения, шестой сумматор 30, пропорционально-интегральный элемент 31, седьмой сумматор 32, пропорциональный элемент 33, второй 34, 15 третий 35 и четвертый 36 блоки умножения, восьмой сумматор 37, множитель- но-делительный блок 38, первый 39 и второй 40 Функциональные преобразователи, источник 41 сигнала, компаратор 20 42 и блок 43 измерения длительности импульса тока,Блок 43 измерения длительности импульса тока содержит четвертый интегратор 44, второй коммутатор 45, блок 25 46 памяти, девятый сумматор 47, второй компаратор 48, первый 49 и второй 50 мультивибраторы, первый 51 и второй 52 элементы НЕ, триггер 53.Элементы фиг.1 (за исключением 30 элементов 2, 12 и 28) и их связи являются признаками основного изобретения и обеспечивают работу устройства в соответствии с описанием основного изобретения. 35Первый регулятор 2 в диапазоне рабочих нагрузок двигателя решае задачи, предусмотренные в основном изобретении. В зоне малых нагрузок, когда 4 О в цепи якоря наблюдается прерывистый ток, он дополнительно обеспечивает стабилизацию динамики системы управления в условиях, когда меняются ее параметры. 45Блок 12 возбуждения решает те же задачи, что и в основном изобретении. Конструктивное отличие его заключается в том, что вход функционального преобразователя блока 12 можно с по мощью дополнительно введенного коммутатора переключать со второго входа блока 12 на его третий вход. Это позволяет при больших динамических ошибках по скорости осуществлять ослабление потока возбуждения двигателя в функции сигнала, пропорционального фактическому значению скорости двигателя, что позволяет более полно ис% 12 Е 5(с,%)На выходе третьего блока 35 умножения Формируется сигнал, пропорциональный величине Г(к,ъ)На выходе четвертого блока 36 умножения Формируется сигнал, пропорциональный величине% Е 12 Е,ГЬ,Ъ)Сумматоры 30, 32 и 37 обеспечивают суммирование сигналов, поступающих на их входы. При этом сигналы, поступающие на второй вход сумматора 30 и на первый и второй входы сумматора 37, суммируются с обратными знаками. На выходе сумматора 30 формируется сигнал задания на ток якоря. На выходе сумматора 37 формируется сигнал, пропорциональный величине П- -%ш 2На выходе сумматора 32 формируетсясигнал, пропорциональный величине ЪЕ 1%Е 1 -- + ---- -=(к+ - -) --- . (9) Х(сс,%) 2 ЕйЬ,9) 2 Е,Г(о,фА)Пропорционально-интегральный элемент 31 обеспечивает пропорционально интегральное преобразование сигнала, поступающего на его первый вход, если на втором и третьем входах наблюдают 3 13004 рости механизма, блок 12 возбуждения, датчик 13 упругого момента, задатчик 14, первый 15, второй 16 и третий 17 интеграторы, второй 18, третий 19, четвертый 20 и пятый 21 сумматоры, обмотку 22 возбуждения, первый 23, второй 24 и третий 25 корректирующие усилители, коммутатор 26, второй регулятор 27 и второй датчик 28 тока.ся нулевые значения сигналов, Присутствие сигнала на втором его входе блокирует интегральную составляющую закона преобразования. Присутствие сигнала на третьем его входе обеспе чивает нулевой сигнал на выходе независимо от уровня сигнала, поступающего на его первый вход. Переход с пропорционально-интегрального закона преобразования на пропорциональный и наоборот осуществляется соответственно в моменты поступления и снятия сигнала на .втором входе элемента 3 1, Нулевой сигнал на выходе элемента 3 1 обеспечивается спустя небольшой промежуток времени после поступления сигнала на его третий вход. Снятие сигнала с третьего входа элемента 3 1 вызывает немедленную реакцию элемента 3 1 на сигнал, поступающий на его пер вый вход.Иножительно-делительный блок 38 обеспечивает на своем выходе величину, обратную произведению сигналов, поступающих на его входы. Выходной сигнал множительно-делительного блока пропорционален величине 1ТБ 3)30Выходной сигнал первого функционального преобразователя 39 пропорци%онален величине зп-.2Выходной сигнал второго Функционального преобразователя 40 пропорционален величине сов(- - -) .в 2Выходной сигнал источника 41 сиг/ нала пропорционален величине - .ШКомпаратор 42 обеспечивает на своем выходе сигнал в промежутках времени, когда оба сигнала на его входах45 имеют нулевые значения.Блок 43 измерения длительности импульса тока обеспечивает сигнал на первом выходе в промежутках времени, когда ток якоря прерывистый (импульсный).Дья прерывистого тока якоря на втором выходе блока .43 обеспечивается сигнал, пропорциональный величине55%При работе с непрерывным током якоря на втором выходе блока 43 обеснечивается сигнал, пропорциональный Нвеличине в , На первый и второй входыВблока 43 поступают соответственносигналы, пропорциональные току якоряи величинешСтатическое состояние блока 43 измерения длительности импульса тока наблюдается когда система работает с непрерывными токами якоря и характеризуется тем, что на выходе компаратора 48 наблюдается сигнал, а выходные сигналы интегратора 44, блока 46 памяти первого мультивибратора 49 и триггера 53 равны нулю, На выходе сумматора 47 наблюдается сигнал, проИпорциональный величинеЕ Динамический режщ блока измерения длительности кчпульса тока наступает в момент появления паузы (значение тока равно нулю) в токе якоря. В указанный момент выходной сигнал компаратора 48 принимает нулевое значение и вызывает появление сигналов на выходах мультивибратора 49 и триггера 53, что деблокирует блок 46 памяти и обеспечивает интегратору 44 воэможность интегрировать сигнал, поступающий на его первый вход, В момент окончания паузы в токе якоря на выходе компаратора 48 устанавливается сигнал, вызывающий запуск мультивибратора 49 и 50, Выходной сигнал мультивибратора 50 переключает коммутатор 45 на время своего действия, обеспечивая запоминание выходного сигнала интегратора 44 в блоке 46 памяти. В момент установки в ноль сигнала на выходе мультивибратора 50 коммутатор 45 возвращается в исходное состояние, после чего выходной сигнал интегратора 44 устанавливается в ноль. Выходной сигнал блока 46 памяти, поступая на первый вход сумматора 47, вызывает уменьшение его выходного сигнала сумматора, приводя его в соответствие с Фактической длительностью импульса ока, В момент наступления очередной паузы в токе якоря динамический вышеописанный процесс повторяется до тех пор, пока будет появляться пауза в токе якоря. В момент наступления непрерывного тока якоря на выходе компаратора 48 появляется сигнал и запускает мульти- вибратор 49. Спустя промежуток време 130041 05ни - - выходной сигнал мультивибращ Гтора 49 устанавливается в ноль, вызывая установку в ноль выходных сигналов триггера 53 и блока 46 памяти. Блок 43 измерения длительности импульса тока возвращается в статическое состояниеСтатическое состояние первого реЮ гулятора 2 наблюдается в периоды времени, когда задание на скорость и скорость двигателя равны нулю. В указанные периоды времени на выходе компаратора 42 наблюдается сигнал, обеспечивающий15 нулевое значение выходного сигнала пропорционально-интегрального элемента 31, и, следовательно, нулевой уровень сигнала на выходе регулятора 2,Регулятор 2 может работать в двух динамических режимах. Первый динами 20 ческий режим соответствует работе регулятора 2 с непрерывным током якоря, второй - с прерывистым током якоря. Переход регулятора 2 в динамические режимы наступает в момент установки в ноль сигнала на выходе компаратора 42. Переход в статическое состояние осуществляется спустя небольшой промежуток времени после появления сиг 30 нала на выходе компаратора 42.Первый динамический режим регулятора 2 характеризуется тем, что блок 43 измерения длительности импульса тока находится в статическом режиме и обеспечивает на своем первом выходе 35 сигнал, равный нулю, а на втором выходе - сигнал, пропорциональный велийчине в , Укаэанное состояние блока 43ш40 обеспечивает пропорционально интегральный закон управления элементом 31, неизменный сигнал на выходе функционального преобразователя 39 и зависимость выходных сигналов блоков 34 и 35 умножения функционального преобразователя 40 и множительно-делитель- ного блока 38 только. от угла сс управления, т,к. -=-=сопят, Следовательно,юшв первом динамическом режиме на выходе регулятора 2 обеспечивается выходной сигнал, пропорциональный величинег(9) при -=-" и являющийся функцией2 штолько угла управления выпрямителя.Второй динамический режим регулятора 2 наблюдается в периоды времени; 12 8когда блок 43 измерения длительности находится в динамическом режиме, обеспечивая на своем первом выходе сигнал постоянного уровня, на втором выходе- сигнал, пропорциональный величинеЪДинамический режим работы блока 43 обеспечивает пропорциональный закон управления элементом 31 и зависимость выходных сигналов блоков 34 - 36 умножения, функциональных преобразователей 39 и 40 и.множительно-делительного блока 38 от длительности импульса тока. Следовательно, во втором динамическом режиме на выходе регулятора 2 обеспечивается сигнал, пропорциональный величине (9) и являющийся функцией не только угла управления, но и длительности импульса тока.Предлагаемая самонастраивающаяся система управления (по сравнению с системой-прототипом) ослабляет магнит. ный поток в функции скорости двигателя, если вход функционального преобразователя блока 12 возбуждения будет подключен к третьему входу блока 12, что позволяет эффективней использовать двигатель по напряжению якоря. Кроме того, включение в состав предлагаемой системы управления дополнительного датчика тока и первого регулятора 2 позволяют самонастраивающейся системе управления работать с требуемыми динамическими характеристиками во всем диапазоне изменения назрузок при использовании в качестве усилителя 3 мощности управляемого выпрямителя. Отличие работы системы управления в данном случае определяются только работой регулятора 2, которая описана выше.Отличительные признаки предлагаемой системы управления позволяют использовать в самонастраивающейся системе управляемые полупроводниковые выпрямители многофазного синусоидального напряжения переменного тока в напряжение постоянного тока. Указанные выпрямители (по сравнению с ртутными и электромашинными преобразователями) имеют меньшие габариты и стоимость, и более высокий коэффициент полезного действия.ормула изобретения Р1. Самонастраивающаяся система управления по авт. св. У 1138787,1 ЗОО 12 фиг. г о т л и ч а ю щ а я с я тем, что, с целью повышения качества управления системы, в нее дополнительно введен второй датчик тока, выход которого соединен с пятым входом первого регу-лятора, а выход датчика скорости соединен с третьим входом блока возбуждения.2. Система по п.1, о т л и ч а - ю щ а.я с я тем, что первый регуля- Ю тор содержит множительно-делительный блок, четыре блока умножения, два функциональных преобразователя, пропорционально-интегральный элемент, три сумматора, пропорциональный эле мент, блок измерения длительности импульса тока, источник сигнала и компаратор, причем первый вход первого регулятора через пропорциональный элемент соединен с первыми входами ком паратора и первого блока умножения, подключенного выходом к первому входу первого сумматора, выход которого соединен с первым входом пропорционально-интегрального элемента, подключен ного вторым входом к первому выходу блока измерения длительности импульса тока, второй выход которого соединен с первыми входами второго сумматора и второго блока умножения и через пер-ЗО вый функциональный преобразователь -с первым входом множительно-делительного блока, подключенного выходом квторому входу второго блока умноженияи первому входу третьего блока умножения, второй вход которого соединенс выходом пропорционально-интегрального элемента и вторым входом второгосумматора, третий вход которого соединен с выходом источника сигнала ипервым входом блока измерения длительности импульса тока, а выход через второй функциональный преобразователь - с вторым входом множительно"делительного блока выход второго блока умножения соединен с первымвходом четвертого блока умножения,подключенного вторым входом к второмувходу компаратора, а выходом - к первому входу третьего сумматора, второйвход которого соединен с выходом третьего блока умножения, а выход соединен с выходом первого регулятора,выход компаратора подключен к третьему входу пропорционально-интегрального элемента, а второй, третий, четвертый и пятый входы первого регулятора подключены соответственно к вторым входам первого сумматора, компаратора и четвертого блока умножения,первого блока умноЖения, блока измерения длительности импульса тока.1300412 Составитель В,Башкироведактор А.Ренин Техред Н.Глущенко, Корректор Е.Рош каз 1147/45 Тираж 864 ВНИИПИ Государственного комитета СС по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., сн
СмотретьЗаявка
3933045, 22.07.1985
НОВОКУЗНЕЦКОЕ ОТДЕЛЕНИЕ ВСЕСОЮЗНОГО НАУЧНО ИССЛЕДОВАТЕЛЬСКОГО, ПРОЕКТНОГО И ПРОЕКТНО-КОНСТРУКТОРСКОГО ИНСТИТУТА ПО КОМПЛЕКСНОЙ ЭЛЕКТРИФИКАЦИИ ПРОМЫШЛЕННЫХ ОБЪЕКТОВ "ТЯЖПРОМЭЛЕКТРОПРОЕКТ" ИМ. Ф. Б. ЯКУБОВСКОГО
ОРЕЩЕНКО РУДОЛЬФ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 30.03.1987
Код ссылки
<a href="https://patents.su/7-1300412-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Адаптивный регенератор

Номер патента: 1363490
Опубликовано: 30.12.1987
Автор: Абрамов
МПК: H04B 3/04
Метки: адаптивный, регенератор
...импульса. Нулевому фазовому сдвигу соответствуеткодовая комбинация на выходе накопителя ОООО; 87.,фазовому сдвигу соответствует 1000; 16 Х фазовому сдвигусоответствует 1100, 327 фазовому 40сдвигу соответствует 11 О, 647 фазовому сдвигу соответствует 1111.Сигнал с кодового выхода накопителя подается на кодовый вход второго дешифратора 21, где происходит 45формирование кодовой комбинации, поддействием которой осуществляетсяуменьшение фазового сдвига между информационными и тактовыми импульсами,150 Для того, чтобы при формированиикодовой комбинации во втором дешифраторе 2 1 учитывался знак фазы (опережение или запаздывание), на первыйи второй дополнительные входы дешифратора 21 подаются прямой и инверс" ный сигналы с выходов КЗ-триггера...
Преобразователь дельта-модулированного сигнала в импульсно кодово-модулированный сигнал

Номер патента: 1533006
Опубликовано: 30.12.1989
Авторы: Алена, Котович, Пундурс, Хофмаркс
Метки: дельта-модулированного, импульсно, кодово-модулированный, сигнал, сигнала
...В случае, если сумма чисел А(с) 45и В(с) не превышает 15 (в двоичномкоде 1111), что соответствует случаю 1 в табл,4 и первой строке втабл,1, результат суммирования С(с)в неизменном виде подается как навходы дискретизатора 11, так и навход блока 2 задержки, Знак р(с)сигнала при этом будет положительным, а на выходах счетчика 9 нули,Запись сигналов ос), у(с) и Б(с)55в табл, 1, означает, что остальныезначения сигналов в строке не изменяются, если, например, вместо комбинации значений сигналов о 1(с)=1,(с) =1, 8(с) =1 эти сиг .д., о Утравны нулю (1-7 строки в т 1)Гак только сумма чисел А(с) и В(с)превышает 15, в пятом разряде сумматора 4 появляется единица (Э 1(с) =1),что увеличивает состояние счетчика 9на единицу (строка 3 в...
Устройство для подавления сигнала цветовой поднесущей

Номер патента: 1774520
Опубликовано: 07.11.1992
Авторы: Белецкий, Гордийчук, Мовчан, Топтыгин
МПК: H04N 11/00
Метки: подавления, поднесущей, сигнала, цветовой
...цветовой поднесущей, Первый выход усилителя 3 подключен к входу управления фильтра 1, Второй выход усилителя 3 подключен к выходу усилителя 4 и входу управления фильтра 2,Сигнальный вход фильтра 1 является сигнальным входом устройства для подавления сигнала цветовой поднесугцей. Выход фильтра 1 соединен с сигнальным входом фильтра 2, выход которого является выходом устройства для подавления сигнала цветовой поднесущей,Работает предлагаемое устройство следующим образом.На вход устройства и, соответственно, на вход фильтра 1 подают полный видеосигнал системы РА или БЕКАМ, который через резисторы 5 и 8 фильтров 1 и 2 поступает на выход устройства,При работе в режиме ЯЕСАМ на вход управления усилителя 3 подают высокий уровень...
Устройство для умножения частоты следования импульсов

Номер патента: 474003
Опубликовано: 15.06.1975
Авторы: Дорошенко, Коген, Петров
МПК: G06F 7/52
Метки: импульсов, следования, умножения, частоты
...выходная частота от умножения входной частоты , должна в К раз быть меньше частоты То генератора образцовой частоты. 6где / - выходная частота устройства.Схема совпадения 8 открывается на времяТ,. - То К(Л+1) =То К ЛЛ. Так как Т, К ЛУ(Т, К, то на запоминающий регистр 5 3 импульсы с первого делителя частоты 9 непоступят. Для поступления одного импульса е делителя частоты 9 необходимо, чтобы схема совпадения 8 была открыта ца время Т, К. В установившемся режиме число, записанное в 10 запоминающий регистр, остается постоянным,Для разцых входных частот оно различно.После поступления третьего входного импульса последовательность работы узлов устройства повторяется, Таким образом, уже пос ле прихода второго входного импульса частоты...
Устройство для измерения межклетевых натяжений проката

Номер патента: 1039600
Опубликовано: 07.09.1983
Авторы: Демин, Петров, Савченко, Сосковец
МПК: B21B 38/06
Метки: межклетевых, натяжений, проката
...якоря электродвигателя,Устройство для измерения межкле- ,5тевых натяжений проката (фиг.1) содержит датчик 1 тока якоря электро-.двигателя предыдущей клети, датчик2 скорости вращения вала, датчик 3ЭДС этого же электродвигателя, датчик 104 наличия металла в предыдущей клети, датчик 5 давления металлана валки этой же клети, сумма-торы б и 7, блок 8 усиления,блок 9 умножения, блок 10 интегриро" цнания, сумматор 11, блок 12 интегрирования, блок 13 умножения, сумматор 14, блок 15 усиления, ключ 16,элемент 17 НЕ, блок 18 интегрирования, сумматор 19, блок 20 умножения,блок 21 интегриронания, ключ 22,сумматор 23, блок 24 усиления, блок25 умножения, блок 26 усиления, датчик 27 наличия металла н последующейклети, ключ 28,Выход датчика 1 тока...
Предыдущий патент: Устройство для геоэлектроразведки
Следующий патент: Способ настройки регулятора предельных оборотов турбомашины
Случайный патент: Валковая жатка