Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1290255
Авторы: Куликов, Михайловский, Чикуров
Текст
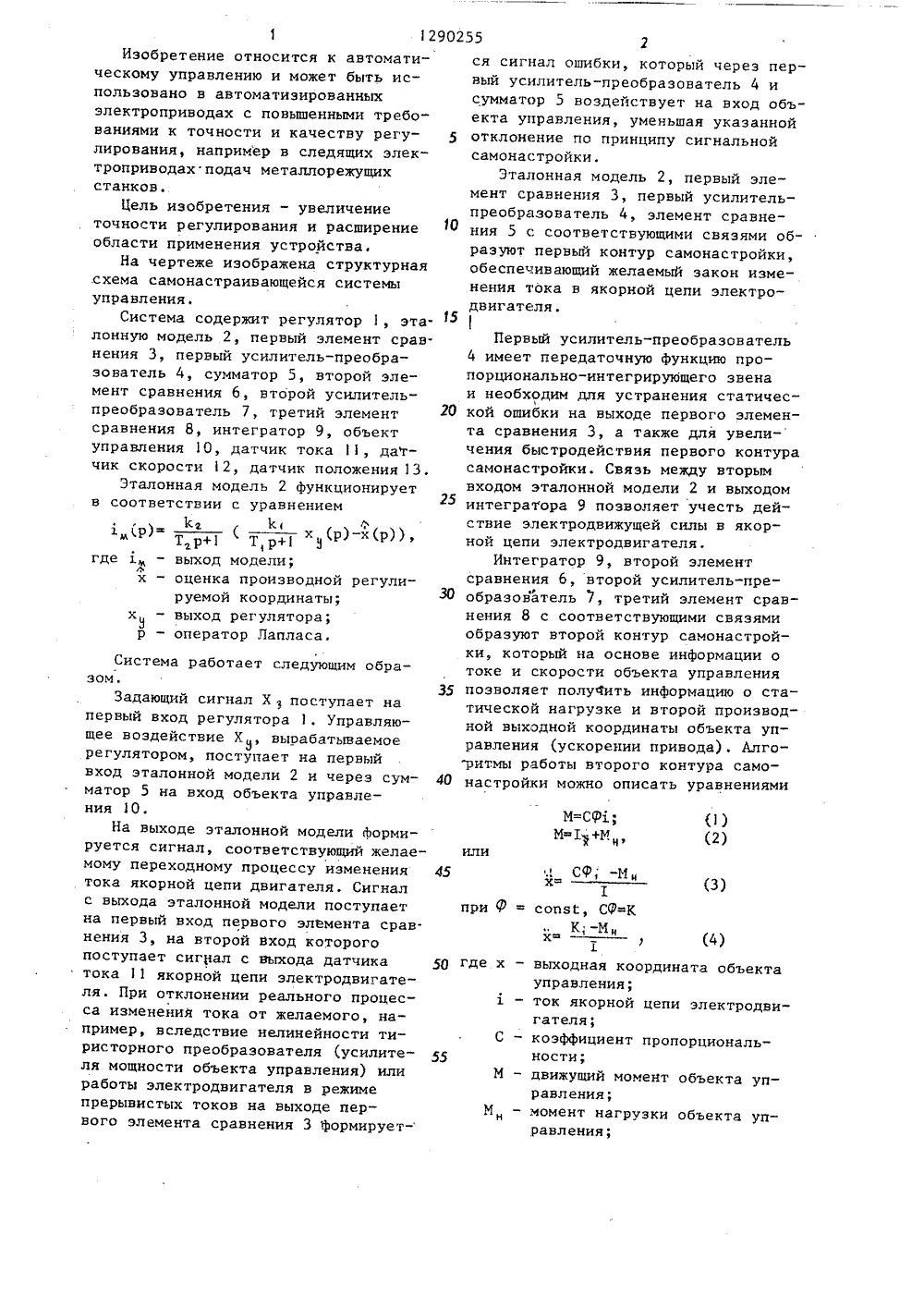
(5) 4 С 05 В 13/02 ПИСАНИЕ ИЗОБРЕТЕНА ВТОРСНОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ(46) 15.02,87. Бюл, У б (71) Уфимский авиационный институт им. Серго Орджоникидзе(57) Изобретение относится к областисамонастраивающихся систем управления, Цель изобретения - повышениеточности и расширение области применения системы. Она содержит регулятор 1, эталонную модель 2, первыйэлемент сравнения 3, первый усилитель-преобразователь 4, сумматор 5,второй элемент сравнения 6, второйусилитель-преобразователь 7, третийэлемент сравнения 8, интегратор 9,объект 10 управления, датчик 11 тока, датчик 12 скорости, датчик 13положения, Цель достигается за счетвведения элементов 4, 7, 8, 1 и новых связей. 1 ил.(1) (2) М=СРд; м-ь+м, или45 при Ф 50 где х С55М М Изобретение относится к автоматическому управлению и может быть использовано в автоматизированныхэлектропринодах с повьппенными требованиями к точности и качеству регулирования, например в следящих электроприводах подач металлорежущихстанков,Цель изобретения - увеличениеточности регулирования и расширениеобласти применения устройства.На чертеже изображена структурная.схема самонастраивающейся системыуправления.Система содержит регулятор 1, эта.лонную модель 2, первый элемент срав.нения 3, перный усилитель-преобразователь 4, сумматор 5, второй элемент сравнения 6, второй усилительпреобразователь 7, третий элементсравнения 8, интегратор 9, объектуправления 10, датчик тока 1, дагчик скорости 12, датчик положения 13,Эталонная модель 2 функционируетн соответствии с уравнениемгде- выход модели;х - оценка производной регулируемой координатых - выход регулятора;р - оператор Лапласа. Система работает следующим образом.Задающий сигнал Хпоступает на первый вход регулятора 1, Управляющее воздействие Х, вырабатываемое регулятором, поступает на первый вход эталонной модели 2 и через сумматор 5 на нход объекта управления 10.На выходе эталонной модели формируется сигнал, соответствующий желаемому переходному процессу изменения тока якорной цепи двигателя, Сигнал с выхода эталонной модели поступает на первый вход первого элемента сравнения 3, на второй вход которого поступает сигнал с выхода датчика тока 11 якорной цепи электродвигателя. При отклонении реального процесса изменения тока от желаемого, например, вследствие нелинейности тиристорного преобразователя (усилителя мощности объекта управления) или работы электродвигателя в режиме прерывистых токов на выходе первого элемента сравнения 3 формируется сигнал ошибки, который через первый усилитель-преобразователь 4 исумматор 5 воздействует на нход объекта управления, уменьшая указанной 5 отклонение по принципу сигнальнойсамонастройки.Эталонная модель 2, первый элемент сравнения 3, первый усилительпреобразователь 4, элемент сравнения 5 с соответствующими связями образуют первый контур самонастройки,обеспечивающий желаемый закон изменения тока н якорной цепи электродвигателя.15 Первый усилитель-преобразователь4 имеет передаточную функцию пропорционально-интегрирующего звенаи необходим для устранения статичес 20 кой ошибки на выходе первого элемента сравнения 3, а также для увеличения быстродействия первого контурасамонастройки. Связь между вторымвходом эталонной модели 2 и выходом 25 интегратора 9 позволяет учесть действие электродвижущей силы в якорной цепи электродвигателя,Интегратор 9, второй элементсравнения 6, второй усилитель-пре образователь 7, третий элемент сравнения 8 с соответствующими связямиобразуют второй контур самонастройки который на основе информации отоке и скорости объекта управления 35 позволяет получить информацию о статической нагрузке и второй производной выходной координаты объекта управления (ускорении привода), Алгоритмы работы второго контура само настройки можно описать уравнениями СФ; -и(4) выходная координата объекта управления;ток якорной цепи электродвигателя;коэффициент пропорциональности;движущий момент объекта управления;момент нагрузки объекта управления;Т - суммарный момент инерции обь.екта управления;Р - поток возбуждения двигателя.Операция вычисления (К; -М) во втором контуре самонастройки выполня ется с помощью третьего элемента сравнения 8. Сигнал на его выходе пропорционален второй производной выходной координаты объекта управления. Сигнал с выхода интегратора 9, пропорциональный первой производной выходной координаты, сравнивается с помощью второго элемента сравнения 6 с фактическим значением скорости объекта управления 10. Действие нагрузки М на объект управления приводит к появлению на выходе второго элемента сравнения 6 сигнала ошибки, который через второй усилитель-преобразователь 7 поступает на первый вход третьего элемента сравнения 8 и восстанавливает соответствие между скоростью объекта управления и ее оценкой на выходе интегратора. Поскольку значение тока в якорной цепи электродвигателя задано с помощью контура самонастройки, то действие нагрузки влияет только на скорость объекта управления. Следовательно, сигнал на выходе второго усилителя преобразователя 7 пропорционален моменту нагрузки М.Информация о токе во второй контур самонастройки поступает с выхода эталонной модели 2, что устраняет вредное влияние на его работу измерительных шумов, присутствующих в выходном сигнале датчика тока. Источником шумов являются пульсации тока, вызванные ограниченным числом фаз питающего напряжения, работой привода в режиме прерывистых токов или неблагоприятными режимами коммутации в коллекторном узле электродвигателя. Второй контур самонастройки имеет первый порядок, а следовательно, высокое быстродействие и позволяет обеспечить высокую точность оценок первой и второй производной выходной координаты объекта управления. Второй усилитель-преобразователь 7 имеет те же функции и схемную реализацию как и первый усилитель-преобразователь 4. В регулятор 1 системы управления поступает информация о положении, скорости, ускорении и статической нагрузке объекта управления. На основе этих данных регулятор формируетуправляющее воздействие.Передаточная функция регуляторас учетом обратных связей по положению, скорости и ускорению имеет вид11(р) (У, р +(У +У У, )р +(У У +У УУ),хгде У, - коэффициент передачи диф ференцирующего звена регулятора;У.,У,У -коэффициенты передачи позиционных звеньев регулятора.15 В свою очередь характеристический полином объекта управления (дляслучая когда объект управления представляет собой электродвигатель постоянного тока с тиристорным преобразователем) имеет видхоЖ=Р(ьр "тр +Р+ "о) (8)Тогда, приравняв(31 (9)У+,с 1 (10) 25 (11)получим уравнения настройки регулятора. Регулятор позволяет понизитьпорядок объекта управления с четвер того до первого, имея всего одиндифференциатор в основном контуреуправления, что достигнуто благодарявведению обратной связи по ускорению. Такой регулятор трехкратно дифференцируют задающий сигнал, но уровень высокочастотных шумов в задающем сигнале несравненно меньше, чемв сигналах обратной связи. Устранитьвлияние высокочастотных шумов в за дающем сигнале и предотвратить перегрузки в системе при его резкомизменении можно, включив последовательно с первым входом регуляторазадатчик интенсивности, представляющий собой инерционное звено первогоили второго порядка,Информация о скорости поступает в регулятор с выхода интегратора 8, что уменьшает вредное влияние на его работу измерительных шумов, присутствующих в выходном сигнале датчикаскорости.Таким образом, система управления позволяет обеспечить высокое бысТродействие и точность регулирования электропривода, имеет широкий диапазон применения, обладает повышенной помехозащищенностью.Заказ 7899/44 Тираж 864 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раунская наб., д. 4/5Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 Формула изобретения Самонастраивающаяся система управления, содержащая регулятор, первый вход которого соединен с выходом 5 задатчика, а второй вход, через датчик положения - с первым выходом объекта управления, сумматор, подключенный выходом к входу объекта управления, последовательно соединенные эталонную модель и первый элемент сравнения, последовательно соединенные интегратор и второй элемент сравнения, подключенный вторым входом через датчик скорости к второму выходу объекта управления, о т л и - ч а ю щ а я с я тем, что, с целью повышения точности и расширения об ласти применения системы содержитдатчик тока, первый усилитель-преобразователь и третий элемент сравнения, подключенный вторым входом к выходу эталонной модели, а выходом -к входу интегратора и третьему входурегулятора, четвертый вход которогосоединен с первым входом эталонноймодели и выходом интегратора, пятыйвход - с выходом второго усилителяпреобраэователя, а выход - с вторымвходом эталонной модели и первым входом сумматора, второй вход первогоэлемента сравнения подключен черездатчик тока к третьему выходу объекта управления, а выход, через первый усилитель-преобразователь - квторому входу сумматора.
СмотретьЗаявка
3878642, 04.04.1985
УФИМСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ
ЧИКУРОВ НИКОЛАЙ ГЕОРГИЕВИЧ, КУЛИКОВ СЕРГЕЙ ИВАНОВИЧ, МИХАЙЛОВСКИЙ АНАТОЛИЙ ИВАНОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 15.02.1987
Код ссылки
<a href="https://patents.su/4-1290255-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Центробежный чувствительный элемент регулятора скорости дизеля

Номер патента: 1402694
Опубликовано: 15.06.1988
Авторы: Леонов, Шатров, Щетинкин
МПК: F02D 1/04, G05D 13/14
Метки: дизеля, регулятора, скорости, центробежный, чувствительный, элемент
...25подвижно установлены на радиальныхнаправляющих 2 и связаны с ними рабочими пружинами 4, подвижную муФту. 5,выполненную в виде оси, размещеннойвнутри ведущего вала 1 с воэможностью ее осевого перемещения. К подвижной муфте 5 жестко прикрепленыдополнительнь 1 е направляющие 6, вкоторых выполнены радиальные профиль,ные прорези 7, для взаимодействия с35,пальцами Ы, закрепленными на грузах 3.В первом варианте исполнения центробежного чувствительного элемента(фиг,1 и 2) дополнительные направляющие 6 выполнены в виде пластин, па- .40раллельных оси ведущего вала 1, Приэтом ведущий вал 1 выполнен полым ив него свободно входит подвижнаямуфта 5.Во втором варианте исполненияфиг.З и 4) дополнительные направляющие 6 расположены в плоскости,...
Центробежный чувствительный элемент регулятора скорости

Номер патента: 590470
Опубликовано: 30.01.1978
Авторы: Боровик, Готхарт, Козлов, Кудрявцев, Павлов, Хинчук
МПК: F02D 1/04
Метки: регулятора, скорости, центробежный, чувствительный, элемент
...чувствительный элемент регулятора состоит из ступицы 1 с центробежными грузами 2, установленной на приводном валу 3, и муфты 4, шарнирно подвешенной одним концом иа рычагс рсгулятора 5, а вторы 1 концом через подшипник 6 сопри 1.асаО- щейся с лапками грузов 2. К рычагу регулятора 5 подсоединеиа пруж;ша 7 регулятора.В центробекиом чу Вствитс;ьномВ процессс его работы действуют следующие силы: сила упругости иружшы регулятора (восстанавливающая сила), центробежная сила грузов (поддерживаОщая сила) и сила Исса ю фты. При непадвешенном (нсвращаю 1 цсмся) чу ВстВ 11 гслПоъ элез 1 ентс перВые дВС силы отсутствуОт и В этом случае муфта 4 РСГУЛЯТОР 2 ПОД СООСТВЕННЫ ВЕСОЗ ПОВСРНСТСЯ вокруг точки Подвсса до упора В грузы 2 и заимст нск...
Центробежный чувствительный элемент регулятора скорости двигателя внутреннего сгорания

Номер патента: 1364758
Опубликовано: 07.01.1988
Авторы: Горшков, Крутов, Кузнецов, Леонов, Хучуа, Шатров
МПК: F02D 1/04, G05D 13/14
Метки: внутреннего, двигателя, регулятора, сгорания, скорости, центробежный, чувствительный, элемент
...грузы 5. Крестовины4 с шаровыми грузами 5 разделены плоской тарелкой 6. Коническая тарелка 2подпружинена пружиной 7, упирающейсяв корпус 8, а коническая тарелка 1выполнена неподвижной. Центробежныйчувствительный элемент снабжен такжеплоскими направляющими 9, концы которых шарнирно соединены с крестовинами 4.Между направляющими 9 размещены шаровые грузы 5, а сами направляющие 9подпружинены пружинами 10.Центробежный чувствительный элемент работает следующим образом.Скорость вращения вала 3 регулятора скорости передается шаровым гру- З 5зам 5 с помощью направляющих 9 и пружин 10, расположенных на крестовинах4. Плоская тарелка б, заключеннаямежду двумя рядами шаровых грузов 5,40вращается свободно со средней скоро"стью, вдвое превышающей...
Центробежный чувствительный элемент регулятора скорости

Номер патента: 589593
Опубликовано: 25.01.1978
Авторы: Готхарт, Козлов, Хаймин, Хинчук
МПК: G05D 13/14
Метки: регулятора, скорости, центробежный, чувствительный, элемент
...и стержня(направляющей) 5 с упором 6. Активноезвено 4 груза связано с пружиной 7.Направляющая расположена под углом ок оси вращения, большим угла, соответствующего коэффициенту трения ак"тивной части по направляющей.При малой частоте вращения ы активное звено грузов находится в положении, показанном на фиг. 1 В томслучае, когда активное звено 4 грузасовершает только вращательное движение (беэ перемещения по направляющеЯ5), усилие Рм на муфте выразится ввиде кривой 1 (см.фиг.2) . На определенноЯ частоте вращения (точка А, на.фиг. 2) активное звено 4 грузов развивает центробежное усилие Рц (см.фиг. 1), которое имеет составляющееусилие Р, большее предварительной,затяжки пружины 7, Вследствие этого поддействием усилия Г активнав частьгрузов...
Центробежный чувствительный элемент регулятора скорости дизеля

Номер патента: 1359453
Опубликовано: 15.12.1987
Авторы: Блаженнов, Блохин, Полуэктов
МПК: F02D 1/04, G05D 13/14
Метки: дизеля, регулятора, скорости, центробежный, чувствительный, элемент
...4), Грузы 1,2 расположены в пазах крестовины 17, имеющих выступы 18 для ограничения перемещения отключаемых грузов 1.Формула изобретения Изобретение относится к автомати-. ческому регулированию двигателей: внутреннего сгорания, в частности к центробежным чувствительным элемен 5 там регулятора скорости дизеля.Целью изобретения является повышение точности регулирования путем улучшения зависимости усилия воздействия грузов на муфту от частоты 10 вращения.На фиг. 1 изображен центробежный чувствительный элемент в составе регулятора; на фиг. 2 - график зависимости поддерживающей силы, развиваемой чувствительным элементом от числа оборотов вала регулятора; на фиг. 3 - вариант исполнения центробежного чувствительного элемента с рычагами; на...
Предыдущий патент: Система экстремального регулирования
Следующий патент: Выделитель максимума
Случайный патент: Устройство для проворачивания ротора турбомашины