Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
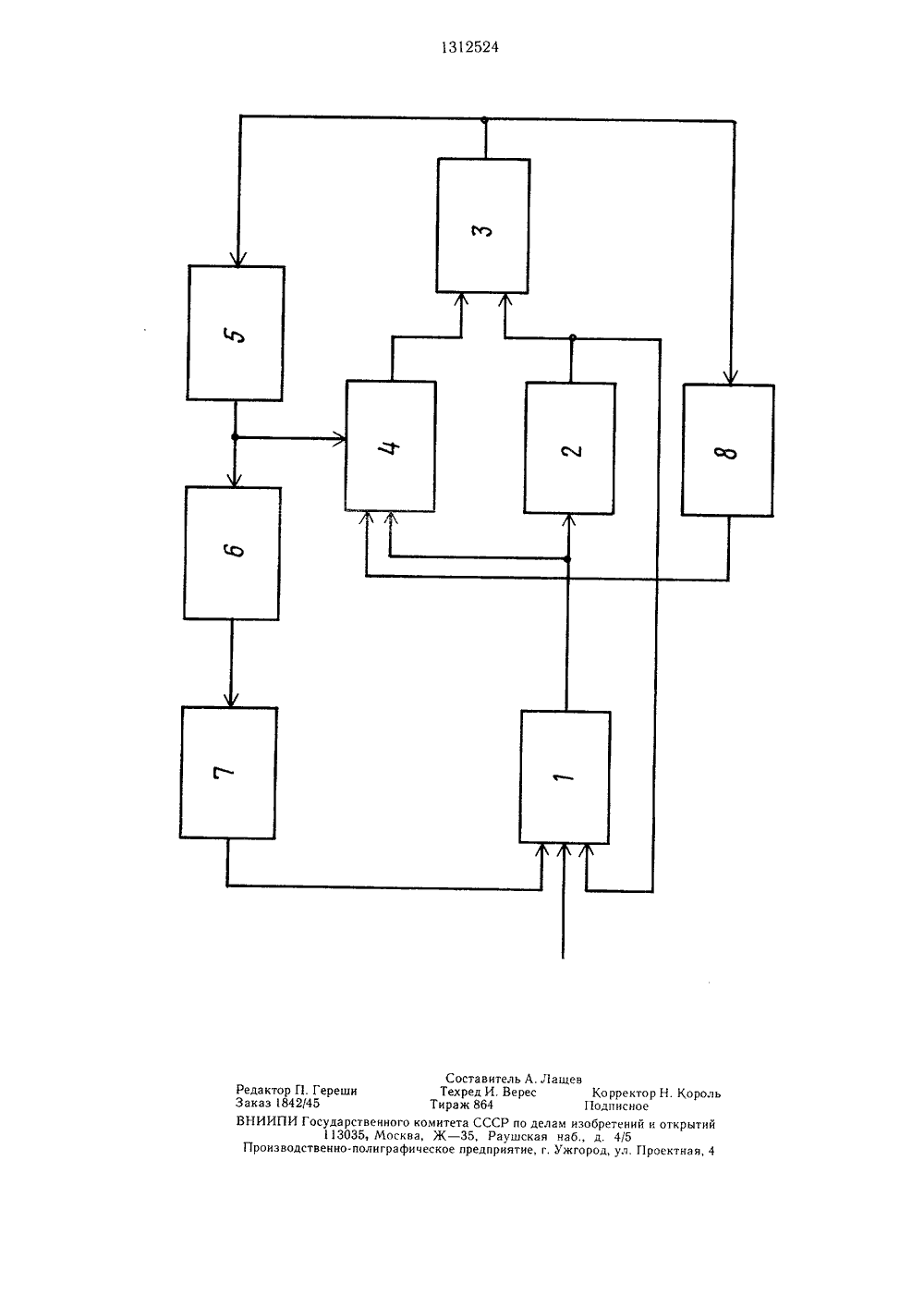
,3.3 ив щи ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ К АВТОРСКОМУ СВИДЕТЕЛЬСТВ(54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ(57) Изобретение может быть использовано в системах автоматического управления, например в системах управления электроприводом постоянного тока, в роботостроении - в системах автоматического управления приводами рабочих органов манипуляционных роботов, в металлургии - в системах автоматического управления приводамипрокатных станов, в станкостроении - всистемах автоматического управления пр одами главного движения металлорежу х станков. Целью изобретения является повышение быстродействия и точности регулирования. Сущность изобретения заключается в том, что в известную самонастраиваюшуюся систему управления по а.с.1153314 дополнительно введен второй инвертор, выход которого соединен с третьим входом модели, а вход - с выходом устройства сравнения, причем выход объекта регулирования соединен с третьим входом первого сумматора. В предлагаемой системе связь выход объекта регулирования - третий вход сумматора приводит к увеличению числа настраиваемых параметров модели, по которым адаптивное управление замкнуто в отличие от возможности незамкнутости адаптивной системы по всем настраиваемым параметрам. Кроме того, ввод дополнительного идентификационного контура (модель - устройство сравнения - второй инвертор - модель) позволяет увеличить адаптивную составляющую сигнала управления, подаваемую на вход модели, уменьшает возможность возникновения условий нарушения скользящего режима. 1 ил.131Изобретение относится к области автома. тического управления и может быть использовано для управления объектами, от которых в процессе функционирования требуется достаточно быстрая и точная отработка задающих воздействий, например в роботостроении - в системах автоматического управления приводами рабочих органов манипуляционных роботов, в станкостроении - в системах автоматичеоского управления приводами главного движения металлорежущих станков, в металлургии - в системах автоматического управления приводами прокатных станов.Цель изобретения - повышение быстродействия и точности управления.На чертеже показана функциональная схема самонастраивающейся системы управления.Самонастраивающаяся система управления содержит сумматор 1, объект 2 регулирования, устройство 3 сравнения, модель 4, блок 5 релейных элементов, блок 6 фильтров, первый инвертор 7 и второй инвертор 8.Самонастраивающаяся система управления работает следующим образом.Задающий входной сигнал системы поступает на первый вход сумматора 1. С выхода сумматора 1 сигнал, равный отклонению регулируемой переменной на втором и третьем входах сумматора 1 от заданного значения входной переменной на первом входе, поступает на вход объекта 2 регулирования и вход модели 4. При совпадении динамических свойств объекта 2 регулирования и модели 4 сигналы, поступающие на первый и второй входы сравнивающего устройства 3, равны и поэтому сигнал с выхода сравнивающего устройства 3 равен нулю. При этом работает лишь контур из блоков 1 и 2. Контура адаптации и идентификации отключены.Предположим, что выходной сигнал объекта 2 регулирования отличен от выходного сигнала модели 4. При этом на выходе устройства 3 сравнения появляется сигнал ошибки, равный отклонению заданного значения выходной переменной модели 4 от дей 12524 Формула изобретения 35 40 5 10 15 20 25 30 2ствительного значения выходной переменной об ьекта 2 регулирования. С выхода устройства 3 сравнения сигнал ошибки поступает на вход блока 5 релейных элементов, на выходе которого формируется разрывное управление моделью 4 таким образом, чтобы в контуре из блоков 4, 3 и 5 существовал скользящий режим, во время которого сигнал на выходе модели 4 подгоняется под выход объекта регулирования 2. Одновременно вычисленное разрывное управление поступает на вход блока 6 фильтров и вход второго инвертора 8.На входе блока 6 фильтров формируется среднее, эквивалентное значение разрывных сигналов, которое затем инвертируется на первом инверторе 7 и через второй вход сумматора 1 поступает на вход объекта 2 регулирования и вход модели 4, На модели 4 данный сигнал компенсирует среднюю составляющую разрывного сигнала, поступающую на второй вход модели 4, таким образом сохраняя заданные эталонные свойства модели 4, а поступая на объект 2 регулирования, компенсирует те параметрические или сигнальные возмущения, которые вызвали отклонение выхода объекта 2 регулирования от модели 4,На выходе второго инвертора 8 формируется сигнал управления поступающий на третий вход модели 4, который позволяет облегчить режим адаптации в контуре из блоков 4, 3 и 5, уменьшая время и ошибку адаптации, и, следовательно, повысить быстродействие и точность управления,Самонастраивающаяся система управления по авт, св, Юо 1153314, отличающаяся тем, что, с целью повышения быстродействия и точности управления, она содержит второй инвертор, подключенный выходом к третьему входу модели, а входом - к выходу устройства сравнения, третий вход сумматора соединен с выходом объекта регулирования.СР по дел Раушская риятие, г. Редактор П. ГерешиЗаказ 1842/45ВНИИПИ Государствен13035, МПроизводственно-полиг СоставитеТехред И. ВТираж 864го комитета ССсква, Ж - 35,фическое предп Корректор Н. Корол Подписноем изобретений и открытий аб., д. 4/5жгород, ул. Проектная, 4
СмотретьЗаявка
4001348, 02.01.1986
ЛЕНИНГРАДСКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ЕГОРОВ АНДРЕЙ АЛЬФРИДОВИЧ, ПАШКОВ НИКОЛАЙ НИКОЛАЕВИЧ, ЧЕРНЫХ АЛЕКСЕЙ ГЕОРГИЕВИЧ, ЮНГЕР ИГОРЬ БОРИСОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 23.05.1987
Код ссылки
<a href="https://patents.su/3-1312524-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство сравнения

Номер патента: 1287096
Опубликовано: 30.01.1987
Авторы: Горяйнов, Остнек, Рираховский, Шлифер
МПК: G05B 1/01
Метки: сравнения
...сравнения, формируемого уст" 55ройством сравнения на выходах 33-37в зависимости от соотношения контролируемого напряжения 13, преобразуемого в код Я , и опорных напряжений жение 13 , достигает величины напряжения 13 с 61 с - , 1 13= 13 с- а 2 =И2 п хю5 где и - число разрядов счетчика 20;Ц - опорное напряжение ЦАП;1 . - номер разряда двоичногочисла;.а - знак ( цифра) двоичной системы счисления, который принимает значения 0 или 1 15"и 1,-1М =Е а 2 код, пропарциональщ 4 ннйй величине напряжения 13 .Импульс 13 з с ныхода компаратора 3 переключает триггер 11, связанный со входом С триггера 1.3, сигнал Б 1, из состояния пО" переходит в состояниеПо фронту переключения сигнала Б в момент 1 в триггере 13 записынается логический уровень сигнала...
Устройство сравнения

Номер патента: 332422
Опубликовано: 01.01.1972
Авторы: Киевский, Мартынюк, Самофалов
МПК: G05B 1/01
Метки: сравнения
...ограничителя изменяется фаза результирующего сигнала, характеризующего отношение амплитуд сравниваемых сигналов. Таким образом, устройство производит алгебраическое сравнение сигналов. Посредством усилителя- ограничителя выходные сигналы устройства преобразуются в стандартные импульсы, Настройкой порога чувствительности усилителя- ограничителя обеспечено сравнение величин по трем признакам: меньше, равно, и больше. Если устройство сравнения предназначено для работы, как в импульсном так и резопапсном режимах, то оно состоит из акустически несвязанных широкополосных пьезотрансформаторов (фиг. 2) . Выходной сигнал при работе устройства сравнения в резонансном режиме определяется, как и при импульсном режиме, суммарным действием выходных...
Цифровое -канальное устройство для управления инвертором

Номер патента: 1534692
Опубликовано: 07.01.1990
Авторы: Костюк, Новосельцев, Стрелков
МПК: H02M 5/42
Метки: инвертором, канальное, цифровое
...выходе триггера 12 уровень логической "1 .5 153469 Аналогичным образом на выходе триггера 12 образуется сигнал 23, на выходе элемента 19 совпадения - сигнал 25, на выходе переполнения счетчика 14 - сигнал 27, а на выходе формирователя коротких импульсов - сигнал 29, являющийся выходным и сдвинутый относительно сигнала 21 на угол о( = 90 - сэ (причем сСв - Мо ) в сторо ну отставания. Без нарушения временных соотношений можно сказать, что сигнал 25 опережает" сигнал 21 на угол К = о . Достигаемый эффект обеспечивается тем, что число импуль сов, отсчитываемое суммирующим счетчиком 14, равно Я = 2 " - И%где Н - двоичное дополнение числа И, т.е. преобразователь 6 преобразует дополнительный код Ж во 2 О/временной интервал о.Сигнал 28...
Устройство сравнения

Номер патента: 794607
Опубликовано: 07.01.1981
МПК: G05B 1/01
Метки: сравнения
...с прямого выхода генератора 1 через зО резистор 2 на туннельный диод З,поступает положительный фронт стробирующего сиг. нала Рь а с инверсного выхода генератора 1 через резистор б на туннельный диод б поступает инверсный (отрицательный) 35 фронт стробирующего сигнала К 2. Токи стробсигналов замыкаются на шину нулевого потенциала через резисторы 4 и 7. Входной сигнал У через входной резистор 12 поступает на среднюю точку делителя, 40 состоящего из резисторов 8 и 9. Под,воздействием, всех выше указанных сигналов через туннельные диоды протекают токи 1 э, и 1,. В зависимости от величины входного сигнала У, в одном из туннельных 45 диодов ток первым достигает значения пикового тока диода. Этот туннельный диод переключается и по цепи,...
Устройство восстановления речевого сигнала в системах вывода информации голосом

Номер патента: 645197
Опубликовано: 30.01.1979
Авторы: Андрущенко, Дубовых, Золотарев, Королев
МПК: G10L 13/02, G10L 19/02
Метки: восстановления, вывода, голосом, информации, речевого, сигнала, системах
...Л. Тарасова и Т. Дооровольска Изд.1 Подписи Тираж 454 Заказ 2634/1 ипограф авунова позволяющие восстанавливать речевой сигнал с ошибкой, не превышающей заданную.Для обозначения моментов исключениянесущественных отсчетов приращений используется вспомогательный массив предсказаний Р, значение которого Р(1) = О в том случае, если предыдущее значение а; не может быть использовано для восстановления значения речевого сигнала в следующий момент времени и Р(1) = 1 в том случае, если предыдущее значение аД может быть использовано для получения слелдующего значения х;+ восстанавливаемого сигнала.Устройство работает следующим образом,Первое значение числового массива слова а(1) поступает на вход блока 1 декодирования, затем на вход коммутатора...
Предыдущий патент: Релейная следящая система с нелинейной коррекцией
Следующий патент: Устройство управления тепловой обработкой бетона
Случайный патент: Растровый электронный микроскоп